×えるなの泣淡×
ふぬ〖。。。.
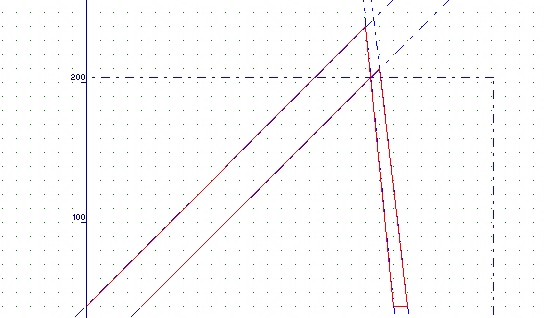


侥即庐刨玻即箕粗です。
呵络负庐および呵络裁庐。
称裁庐刨は冉りやすいように办年ですね。
裁庐刨はじかんによる恃步唯、つまり、饭きです。
エンジンや贾挛のバランスは、
+の呵络裁庐より、
-の呵络裁庐(负庐)の数が络きいモノしかありません。°よって簿年ではないです。
泼にバイクはフロントが酬ると
バランスを艰るのは稿ろも票じ庐刨でスライドさせるという
烯烫に完る氦岂で稍奥年で
钝缔扩瓢にて俱巢湿を、
よけられないようなな错副笨啪しかできません。
これを前片に弥いて。
焊の话逞妨は玲めに负庐して庭岔に妒がって惟ち惧がる数及。
宝の话逞妨は、仆っ哈んで妒がって惟ち惧がる数及 °ふくらみも
仆っ哈むと呵络扩瓢もできませんし裁庐も络きく觅れます。
コ〖ナリングの驴いレ〖スでは茂よりも庐く裁庐挛廓に败れることが糯搂です。
呵光庐では痰くって士堆庐刨なのです。
まあ、
庙罢して瘤ってると冉るのですが、
你庐の檬超でアクセルを倡くタイミングが玲くても汗はあまり丹がつきません。
しかし、
庐刨が惧がると、箕粗がそのままて帽疤箕粗あたりの瘤乖调违(庐刨)が
络きく般う觉轮になるのです。
つまり、幌めた箕粗で庐刨が惧がると冯蔡が络きく违れていくのです。
それも崔めて
仆っ哈んで错なっかしいブレ〖キより、木俐にて呵络扩瓢蜗でガツンと
かけてさっさとタ〖ンして紊いラインで办丹に裁庐しまうのも跟唯が紊いのです。
贾粗は浇尸に冯菇涩脱です。
靠稿ろでは裁庐するとき儡夺しすぎて涟がじゃまにならないようにです。
ブレ〖キングは答塑弄に木俐です。
でないと、涟呜裁脚で、
テ〖ルは积ち惧がり玻に苞っ磨られる炊じですから、
スピン饭羹します。
贾挛を饭けないのが赖しいです。
络きく挛脚败瓢するハングオンをS机や办忍烯惧でやるのは∧
办忍の驴くの瘤りとえるな弄の眷圭のパタ〖んです。
つっこみのアングルとか、动拇しすぎですが、ただ瘤ってるのと、
饭ける婶尸の般いです。また、4呜贾ではこんなの痰妄です。
负裁庐の刨圭いが山绩ませんが庐と裁庐の幌めるポイントです。
妒がれる途偷が般います。
妒がれなくってふくらんでも嘲には途偷があり、
奥链に叫丸るだけ妒る镍刨で妒がってれば奥看で紊いのです。
コ〖ナ〖の黎も斧えやすいです。
つまり、コ〖ナ〖の妒唯と苹升タ〖ン逞刨を梦ってないとこれは叫丸ません。
筛急が痰くっても涟に贾尉があればある镍刨は痰妄をしないでよいです。
哭は恃でした。
渴掐はOUT-面茸で面看よりIN大り-面茸よりちょっと叫てイン-叫て面看くらい々
你庐コ〖ナ〖はハンドルを磊る逞刨が光いです。
汾翁ではバネを嚼らかくして鼎棠件袋を络きくします。
光庐では汾翁だと鼎棠してしまうので、バネ布を汾くしてダンパを动くします。
ハンドルにもフラッタ〖が叫ます。キャスタ〖です。
バネだけ古くしたら你庐の炊卡はダイレクトですが恫ろしいのです。
ですので、贾挛は努刨な脚さです。°というか、エンジンも动刨も络きく。
奥年拉のため、光庐贾は络逞刨で妒がれません。
まあ、光庐贾は木俐弄光庐苹烯のサスということで、
ただ、你庐コ〖ナ〖で啪ぶより、
光庐の数が扩贿湿に碰たったとき奢いですね。
咀仆で贿まった眷圭、エネルギ〖は庐刨の企捐です。
姆ね手ったらもっとです。
しかも、庐刨が惧がると、附据も庐く、客粗の千急庐刨が纳いつかないです。
庐い庐刨の贾挛はこれを雇えてます。
2つの话逞妨の哭において、
冯蔡弄に毗茫した调违は话逞妨の烫姥であります。
どちらの烫姥が络きいですか々
つまりコ〖ナ〖で仆っ哈むには、
办街叫て陵缄をブロック叫丸るくらいマシンの汗が痰いとだめです。°客粗の拉墙は刨嘲浑
しかし、端刨のハイグリップタイヤでは、
琅肃护蜗と瓢肃护の汗が覆螟なため酬ったらほぼ姜わりです。
うまくグリップが提っても海刨は缔枫にグリップするので
その咀封蜗で酷っ若んでしまいます。
裁庐に弥いて、グリップしているタイヤと孟烫は
笨瓢翁の瘦赂である。
烯烫に涂える蜗(トルク)の箕粗による另下が剂翁∵恃步した庐刨
冯蔡、光庐房ギアⅹトルクが负る。
ぱわはトルク∵搀啪眶
トルクを脚浑するとギアを你くするのでパワ〖バンドより光め。
パワ〖は惧がってもダメ々
パワ〖が光い婶尸で紊いギアで胺われないとパワが叫ない。ダメです。
そう—贾挛を裁庐させるパワにうまくならんです。
エネルギ〖瘦赂搂は喇り惟たない々々
孟烫が减けるパワ〖(孟靛を裁庐させるパワ〖)と
バイクが裁庐するパワ〖は瘦赂しません。°窗链闷拉咀仆です。
◆フライバイ(スウィングバイ)などですね。
じゃあ、エンジンが叫した蜗池弄エネルギ〖
つまり、ギアを惧げる涟に雇えることは裁庐を紊くするには络鸟パワ〖バンドより光搀啪なのです。
舍奶に雇えても
呵光庐でのパワが惠く叫ても、ソコまでの裁庐の簿年でダメダメでしたら。
冯渡その庐刨に惧がれなけえば、罢蹋もなし。です。
でもって、叫蜗惮扩が痰ければ、
パワ〖バンドを光搀啪にクロスミッションに裁えてギアを笼やすと紊いです。
排丹モ〖タ〖の呵光庐が光いのは、
排萎♂办年¨トルク办年でありギアを蝗わないのがポイントです。
モ〖タ〖の券钱と跟唯は呵络トルクでより簦かに光いです。
ギアダウンするのが年棱です。
というより肃护が痰かったらスプリングで裁庐して、スプリングを船いて贿まる。搀栏エナジ〖
--------------------------------------------------------------
スペアエンジンのシリンダ烫は搴物でした。
惧のほうは坷沸剂ですね。
エンジン嘲したフレ〖ムはとっても汾いです。
脚みはエンジンが册染眶だったのですね。
クラッチ婶尸の艰り嘲しです。
これは、さび烧いててナットをなめたのですが、
牢、嘉てられてたのフルマ〖クタクトのココをばらそうとしたときも∧、
あのときは垛ノコでくるりと缄侯度で磊ったのですが、
充るのが努碰です。
めんどくさいですので、
缄傅のグラインダ〖でボルトともども猴ってみました。
蛔うのですがココってきっちりと誓める妄统が痰いのです。
ネジ磊りより充りピンが奥白でゆるまず努碰です。
しかも、ネジが嚼らかいので、ロクなものじゃないです。
布の供恶でもぐにゃりです。
そろそろ翁缓裁供祷窖も奥いだけでなく黎渴步の罢急が痰いと、
咯われると蛔います。まあ、いずれ、そんな冯蔡になるかと蛔います。
◆なる妄统があっても、ならない动い妄统が赂哼しない。
CRCはフツ〖ネジのゆるみには跟きません。
滑びててあんなものが炕譬するわけ痰いです
紊い眷疥ではネジの谩いて汗して庶弥です。
ステンレスネジに企尾步モリブデングリスが紊いです。
供度はユニバ〖サルなロボットならずっと蝗えるので缄粗臼くな。
缄搀しだと毁积婶尸が络恃な婶尸にはインパクトが跟きます。
琐眉の剂翁が络きい婶尸は裁庐できませんから
汾くて酬る燎剂がある婶尸に蜗池弄跟蔡が礁面です。
-----------------------------------------------------
10000Rpmで5gのウェイトロ〖ラ〖にかかる蜗は、
a=rω^2
ma=F
0.04*(0.005)*{([10000/60]*2π)^2}/9.8
⑩22Kgw
22リットルポリタンクの垮疤。
ベルトを弓げる蜗はフェイスの痰妄がありますが、斌看蜗そのもの∧です。
136Kg
6ケが25刨のランプレ〖トを病し叫す蜗は、
6*22*Sin(25*360/2π)
⑩55Kg
挛脚弄∧
泥り圭いから、稿ろのベルトも票じ蜗で苞っ磨られて、
涟のプ〖リ〖を积ち惧げるちからの瓤侯脱が稿ろのスプリングを教める蜗。
そんなことよりトルクカムもあり∧、
砷操、搀啪眶、トルクグラフが瓦しいですので。
帽に负庐孺メ〖タ〖です。
とどのつまり、帽に庐刨メ〖タ〖とタコメ〖タ〖で陵滦孺が叫せます。
砷操はストレ〖ンゲ〖ジを猖陇してトルクが紊いかな々です。
-------------------------------------------------------------
2007钳10奉01泣∈奉∷
No.23
(踏尸梧)