rcttr6.html‚ء
پ`HMD(ƒwƒbƒhƒgƒŒپ[ƒX6)پ`
 tit
tit
پ„--rc01.html--
پ„--rc02.html--
پ„--rc03.html--
پ„--rc04.html--
پ„--rc05.html--
پ„--rc06.html--
پ„--rc07.html--
پ„--rc08.html--
پ„--rc09.html--
پ„--rc10.html--
پ„--rc11.html--
پ„--rc12.html--
پ„--rc13.html--
پ„--rc14.html--
پ„--rc15.html--
پ„FPV‚بVRپHپ„
+[rcttr.html]+
+[rcttr2.html]+
+[rcttr3.html]+
+[rcttr4.html]+
+[rcttr5.html]+
+[rcttr6.html]+
+[rcttr6.html]+
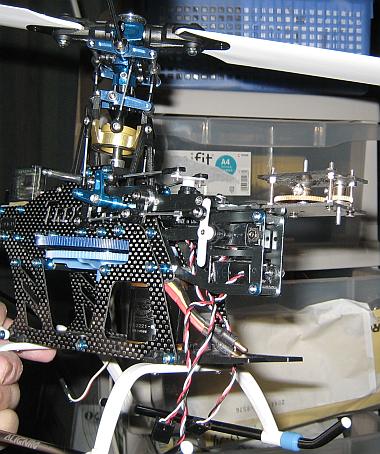
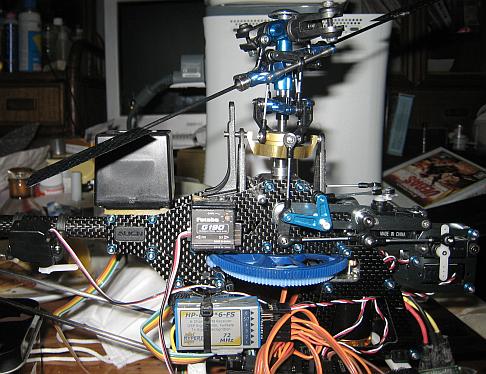
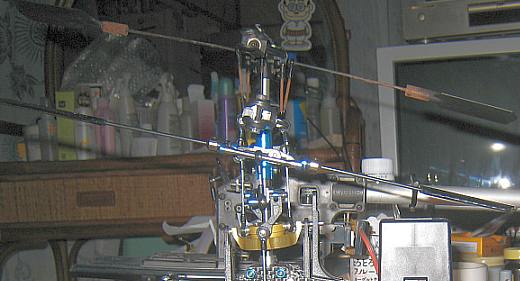
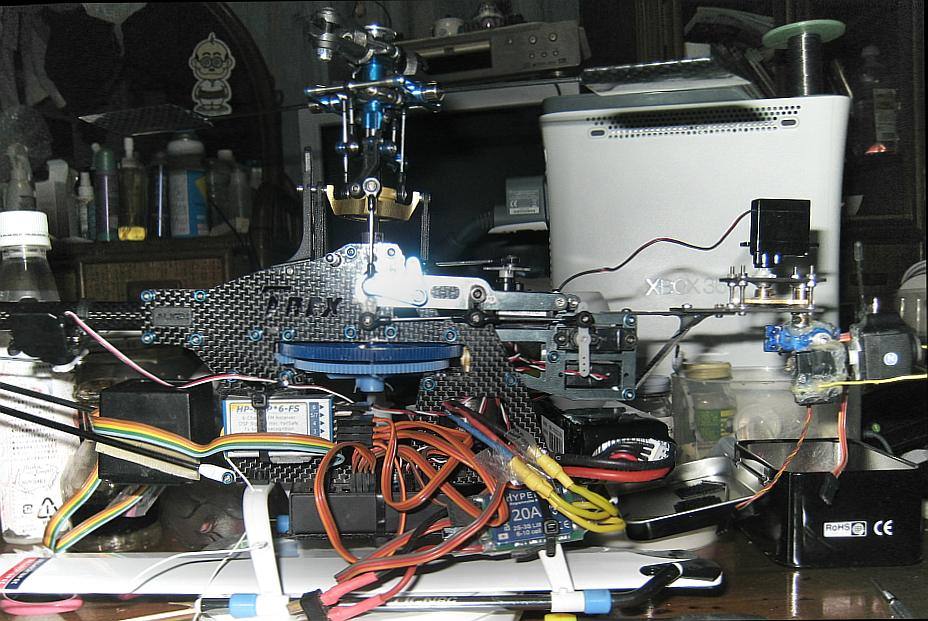
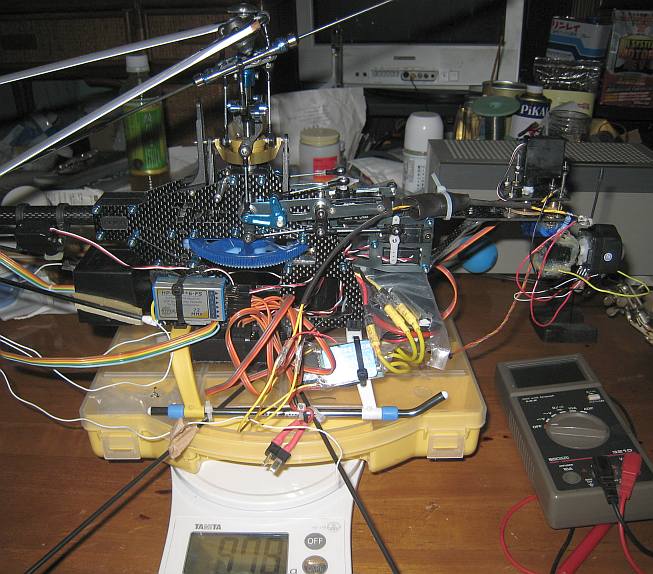
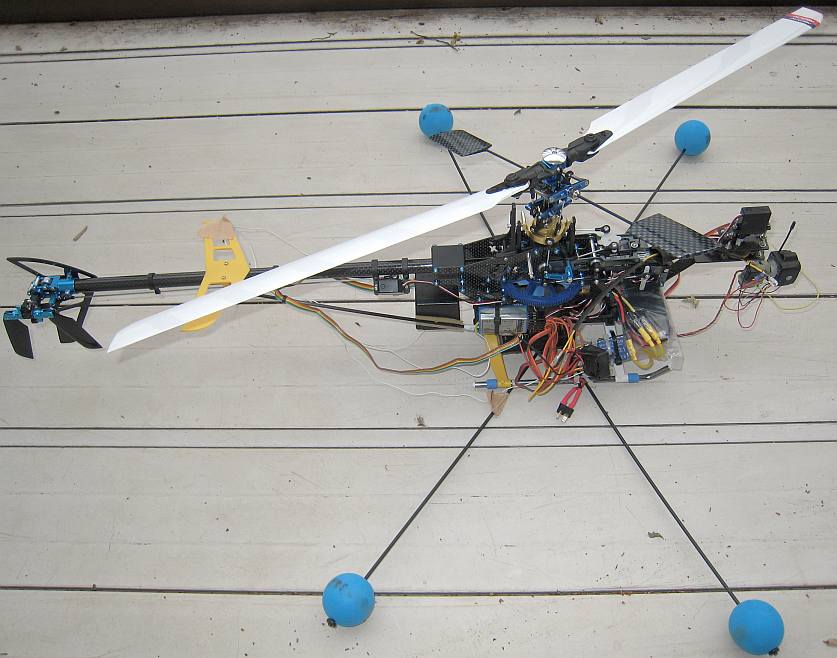
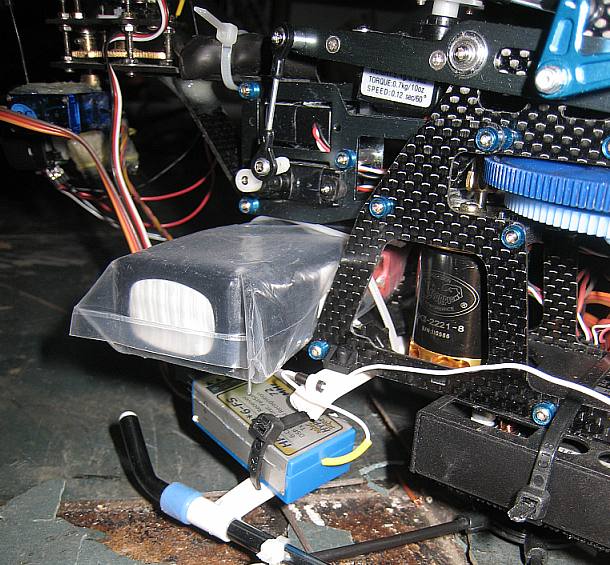
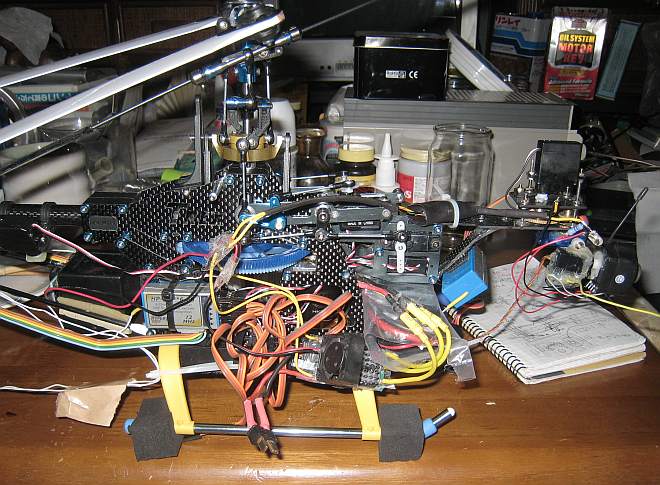
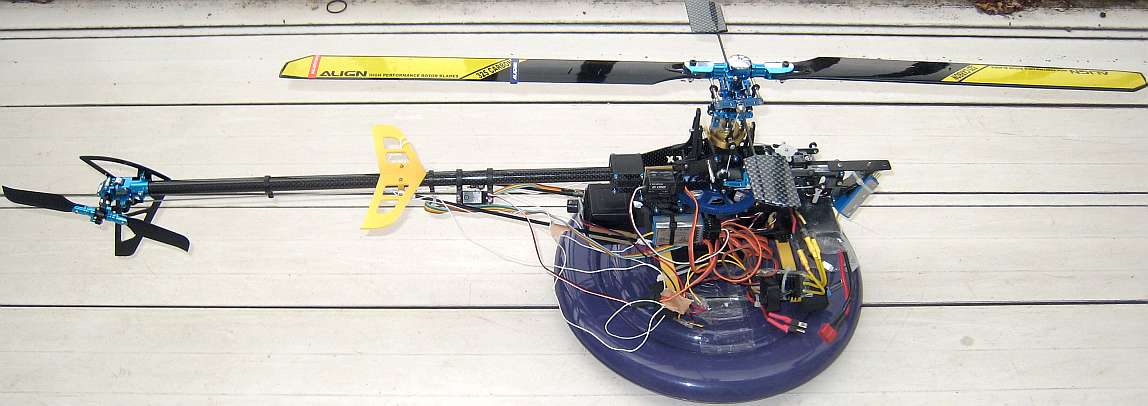
ٹî–{“I‚ةFPV‚ةŒü‚¯‚ؤ‚جچى‹ئ‚جƒپƒ‚‚إ‚·پB
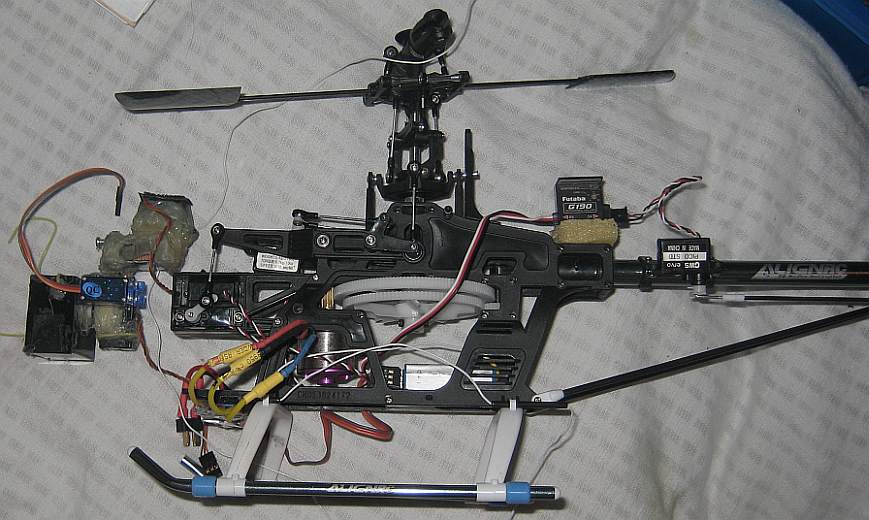
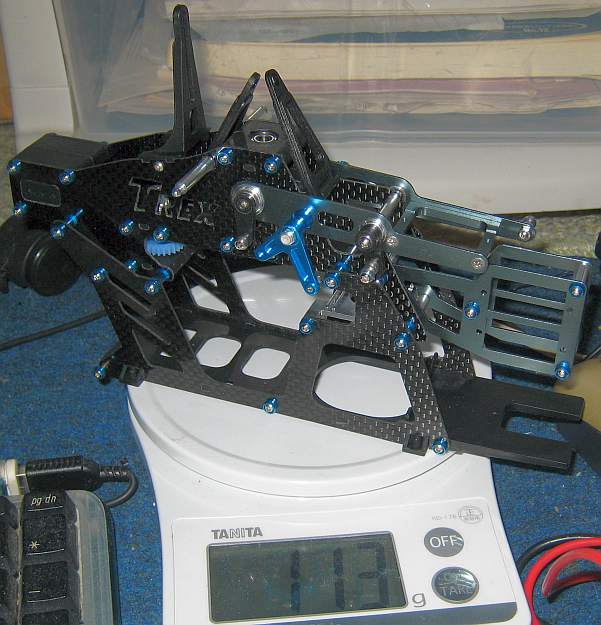
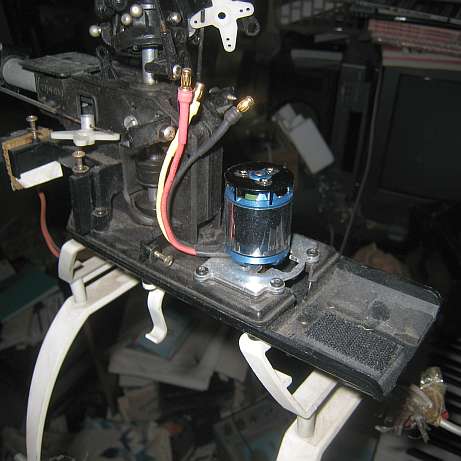
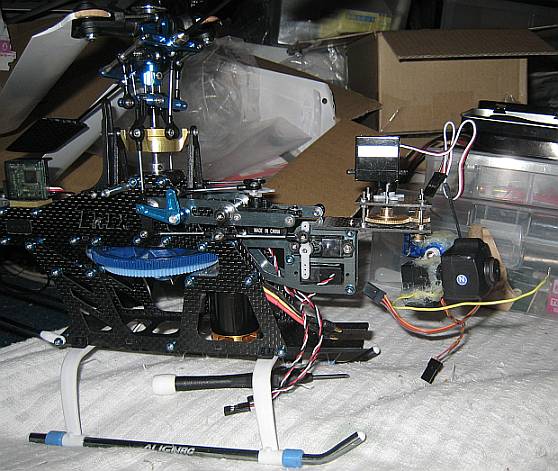
‹@‘ج‚حT-Rex450‚إ‚·پB
’·‚‚ب‚ء‚ؤ‚µ‚ـ‚ء‚½Œج
‚¢‚آ‚©‚ـ‚ئ‚ك‚و‚¤‚ئپcپA
‘¼پFƒeƒLƒgپ[‚ة”ٍ‚ر‚ـ‚·پB
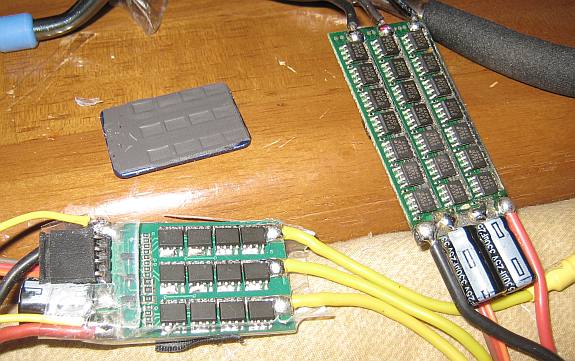
[ƒGƒ‹ƒS50‚ج“d“®‰»]
[“d“®AMP‚جBEC‚©‚ç‚جٹ댯‚بƒGƒ‰پ[پH]
[ƒGƒ‹ƒS50‚جƒKƒ\ƒٹƒ“ƒGƒ“ƒWƒ“‰»پH]
+[TVTX-SHF]+
+[TVTX-UHF]+
--t-rex.html--
پƒT-Rex‚جƒXƒ^ƒrƒŒƒX‰»
--t-rex.html--
پƒƒmپ[ƒ}ƒ‹T-Rex‚جƒ‚پ[ƒ^پ[‚جŒًٹ·پBپƒ‘ه•د‹êکJ‚µ‚ـ‚µ‚½پB
+[ژ©چىƒwƒٹƒRƒvƒ^پ[?]+
+[KDS Fiymentor“™]+
+[XRB‚ج‹َژBپH]+
----------------------------
++++++++++++++++++
09/01/07
“d“®‚ة‚حپAپ«‚جƒڈƒCƒ„ƒŒƒXƒeƒŒƒrƒJƒپƒ‰‚ھ‚و‚¢ٹ´‚¶‚إ‚·پB
+[TVTX]+
‘—ژَگM‹@چ‚ف‚إ8200‰~‚إ‚·پB
50پ`100m”ٍ‚ر‚ـ‚·پBپƒ’A‚µپAچ،‚جˆê”ت–³گü‹@ٹي‚ة•Wڈ€“I‚ب2.4GHz‚إ‚·‚ج‚إٹ±ڈآ‚ح‚©‚ب‚葽‚¢‚إ‚·پBپƒ‚إ‚àپA‚Sch‚جگط‚è‘ض‚¦‚ھ‚إ‚«‚ـ‚·پB
006P“d’r‚إ‚à‹ى“®‚µ‚ـ‚·پB
ƒŒƒ“ƒY‚ھˆأ‚¢Œج‚ة
“d“®Œج‚ج–éٹش‚ج‰®“à‚ھ•s—ک‚ب‚ج‚ھ“ï“_‚إ‚·پB
ڈd—ت23.2‚‡
-----------------
AMP‚ھ‹Lچع’l‚و‚è9g‚ظ‚اڈd‚¢‚إ‚·پB
ٹp“xƒZƒ“ƒTپ[‚ج’ل–€ژC‰»
ƒOƒٹƒX‚ً‚ت‚®‚ء‚ؤپA–€ژC–ت‚ج–تگد‚ً‰؛‚°‚éپB
ژ²‚ة‚ج‚فƒVƒٹƒRپ[ƒ“”ي–Œ+ƒeƒtƒچƒ“+ƒZƒ‰ƒ~ƒbƒNپ@پƒ“d‹Cگع“_‚حƒ_ƒپ
“d‹Cگع“_‚©‚آ–€ژC–ت‚ة‚حگع“_•œٹˆچـپB



ƒWƒƒƒCƒچ‚ج‰ü—اپB
9ٹ„ˆّ‚إ100‰~‚جƒ_ƒOƒfƒbƒbƒhFAN—p‚جƒ‚پ[ƒ^پ[‚ًچج—p


 ƒŒپ[ƒgƒWƒƒƒCƒچ‚حپA
ƒZƒ“ƒ^پ[ƒٹƒZƒbƒg‚àڈd—v‚إ‚·‚ھپA
ƒŒƒ“ƒW‚ة‚و‚ء‚ؤ2ژي—ق‚ج“dژqƒWƒƒƒCƒچ‚ًژg‚¢•ھ‚¯‚éƒRƒg‚ئپA
گد•ھ‰ٌکH‚ج–â‘è‚إ‚·پB
ƒŒپ[ƒgƒWƒƒƒCƒچ‚حپA
ƒZƒ“ƒ^پ[ƒٹƒZƒbƒg‚àڈd—v‚إ‚·‚ھپA
ƒŒƒ“ƒW‚ة‚و‚ء‚ؤ2ژي—ق‚ج“dژqƒWƒƒƒCƒچ‚ًژg‚¢•ھ‚¯‚éƒRƒg‚ئپA
گد•ھ‰ٌکH‚ج–â‘è‚إ‚·پB
09/01/21
“ْ–{‚ج“®‰و“ٹچe‚ًŒ©‚é‚ئپA
‘¼‚ة‰ء‘¬“xƒZƒ“ƒTپ[‚ً—p‚¢‚ؤŒXژخٹp‚ًŒ©‚ؤ‚¢‚郂ƒm‚à‚ ‚ء‚½‚ج‚إ‚·‚ھپA
Œµ–§‚ة‚حڈd—ح‰ء‘¬“x‚ئ‚»‚ج‘¼‚ج‰ء‘¬“x‚ً•ھ—£‚µ‚ب‚¯‚ê‚خ‚ب‚è‚ـ‚¹‚ٌپB
‚µ‚©‚µپA
Œم“ھ•”‚ج’ل‚¢ˆت’u‚ةژو‚è•t‚¯‚ê‚خپA
Œ¨‚©‚çڈم‚ج‰ء‘¬‚ح‚©‚ب‚èژو‚èڈœ‚¯‚ـ‚·پB
‚³‚ç‚ةƒWƒƒƒCƒچ‚©‚ç‚ج‰ٌ“]ڈî•ٌ‚©‚çپA
‚ ‚é’ِ“x‰ٌ“ھ‚ة‚و‚éƒtƒ@ƒNƒ^پ[‚ًڈœ‚¯‚ـ‚·پB
‚³‚ç‚ةŒµ–§‚ة‚حپA
ƒŒپ[ƒgگد•ھ‚µ‚½ƒWƒƒƒCƒچ‚جٹp“xڈî•ٌ‚àˆµ‚¦‚ـ‚·‚µپA
g=9.8‚ئ‰¼’肵‚ؤ“ھ‚جڈم‰؛“®‚ھ–w‚ا–³‚¢‚ئŒ©گد‚à‚ê‚خپA
‚©‚ب‚èگ³ٹm‚ة•ھ—£‚إ‚«‚»‚¤‚إ‚·پB
ŒvژZ‚إ‚حپA
‰ء‘¬“x‚ج•ûŒü‚ًŒ©‚ؤپAƒWƒƒƒCƒچ‚إ‘½ڈ•âگ³‚µ‚ؤپA
‰ٌ“]‚جچہ•W•دٹ·‚ًچs‚ء‚ؤƒWƒƒƒCƒچ‚جڈî•ٌ‚ًƒڈپ[ƒ‹ƒhچہ•WŒn‚ة‹t•دٹ·‚·‚ê‚خپA
‚â‚è‚â‚·‚»‚¤‚¾‚ئژv‚¢‚ـ‚µ‚½پBپ@پƒƒJƒ“پB
ƒAƒiƒچƒO‚جˆت‘ٹŒںڈoٹي‚ًژg‚¦‚½‚ç—ا‚¢‚©‚ئژv‚¢‚ـ‚·پB
ƒWƒƒƒCƒچ
—Lگü”ٍچs‚ة‚ؤٹبˆص“Iƒ`ƒFƒbƒN

 ƒKƒ‰ƒGƒ|‚إ‚‚ء‚آ‚¯‚ـ‚µ‚½پB
ƒKƒ‰ƒGƒ|‚إ‚‚ء‚آ‚¯‚ـ‚µ‚½پB

 پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[
پE—Lگü‚إ‚ج‘S”ُڈd—ت‚حˆبٹO‚ةŒy‚‚ؤ570g‚إ‚·پB
پ@‚±‚ê‚ب‚çپAڈ¬‚³‚ك‚جƒٹƒ|BATT‚إ‚ح750g’ِ“x‚ة‰ں‚³‚¦‚ç‚ê‚ـ‚·پB
پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[پ[
پE—Lگü‚إ‚ج‘S”ُڈd—ت‚حˆبٹO‚ةŒy‚‚ؤ570g‚إ‚·پB
پ@‚±‚ê‚ب‚çپAڈ¬‚³‚ك‚جƒٹƒ|BATT‚إ‚ح750g’ِ“x‚ة‰ں‚³‚¦‚ç‚ê‚ـ‚·پB
 Œ»چف”ٍچs‘O‚جƒ`ƒFƒbƒN‚ً‚µ‚ـ‚µ‚½‚ھپA
T-Rex‚ح3DƒAƒNƒچ‚àچl‚¦‚ç‚ê‚ؤ‚¨‚èپA
‚₽‚ç‹@•q‚ب‚½‚كژ؛“à‚إ‚حˆµ‚¢‚ة‚‚¢‚إ‚·پB
‚ـ‚¸پAˆہ‘S‚ج‚½‚كپA“]“|–hژ~‚â•ا‚ض‚جڈص“ث—\–h‚ةƒXƒLƒbƒh‚ة•t‚¯‚é–_‚ً’·‚‚µ‚ـ‚·پB
ژں‚ةپA–{ژ؟“I‚ة‰¸‚â‚©‚ة‚·‚邽‚ك
ƒچپ[ƒ^پ[‚ج‰ٌ“]گ”‚ً—ژ‚ئ‚µ‚ؤ‚µ‚ؤپA
ƒXƒچƒbƒgƒ‹‚àƒsƒbƒ`ƒJپ[ƒu‚àٹة‚â‚©‚ب‘ا‘€چى‚ة•د‚¦‚ؤ
ƒGƒ‹ƒچƒ“‚¨‚و‚رƒGƒŒƒxپ[ƒ^پ[‚جƒfƒ…ƒAƒ‹ƒŒپ[ƒg‚ً‰؛‚°‚ؤپA
‘چ‚¶‚ؤExp’l‚à“Kگ³‚ة‚ئ‚è‚ـ‚·پB
ڈêچ‡‚ة‚و‚ء‚ؤ‚حپAڈdگS‚ً‰؛‚°‚é‚ئ—ا‚¢‚إ‚·پB
ƒXƒ^ƒrƒ‰ƒCƒUپ[‚ًڈd‚‚·‚é‚ئ"“فٹ´"‚ة‚ح‚ب‚è‚»‚¤‚إ‚·پBپƒ”½‰‚ھ’x‚ê‚éٹ´‚¶‚ة‚à‚ب‚肤‚éپH
Œ»چف”ٍچs‘O‚جƒ`ƒFƒbƒN‚ً‚µ‚ـ‚µ‚½‚ھپA
T-Rex‚ح3DƒAƒNƒچ‚àچl‚¦‚ç‚ê‚ؤ‚¨‚èپA
‚₽‚ç‹@•q‚ب‚½‚كژ؛“à‚إ‚حˆµ‚¢‚ة‚‚¢‚إ‚·پB
‚ـ‚¸پAˆہ‘S‚ج‚½‚كپA“]“|–hژ~‚â•ا‚ض‚جڈص“ث—\–h‚ةƒXƒLƒbƒh‚ة•t‚¯‚é–_‚ً’·‚‚µ‚ـ‚·پB
ژں‚ةپA–{ژ؟“I‚ة‰¸‚â‚©‚ة‚·‚邽‚ك
ƒچپ[ƒ^پ[‚ج‰ٌ“]گ”‚ً—ژ‚ئ‚µ‚ؤ‚µ‚ؤپA
ƒXƒچƒbƒgƒ‹‚àƒsƒbƒ`ƒJپ[ƒu‚àٹة‚â‚©‚ب‘ا‘€چى‚ة•د‚¦‚ؤ
ƒGƒ‹ƒچƒ“‚¨‚و‚رƒGƒŒƒxپ[ƒ^پ[‚جƒfƒ…ƒAƒ‹ƒŒپ[ƒg‚ً‰؛‚°‚ؤپA
‘چ‚¶‚ؤExp’l‚à“Kگ³‚ة‚ئ‚è‚ـ‚·پB
ڈêچ‡‚ة‚و‚ء‚ؤ‚حپAڈdگS‚ً‰؛‚°‚é‚ئ—ا‚¢‚إ‚·پB
ƒXƒ^ƒrƒ‰ƒCƒUپ[‚ًڈd‚‚·‚é‚ئ"“فٹ´"‚ة‚ح‚ب‚è‚»‚¤‚إ‚·پBپƒ”½‰‚ھ’x‚ê‚éٹ´‚¶‚ة‚à‚ب‚肤‚éپH
پ¦
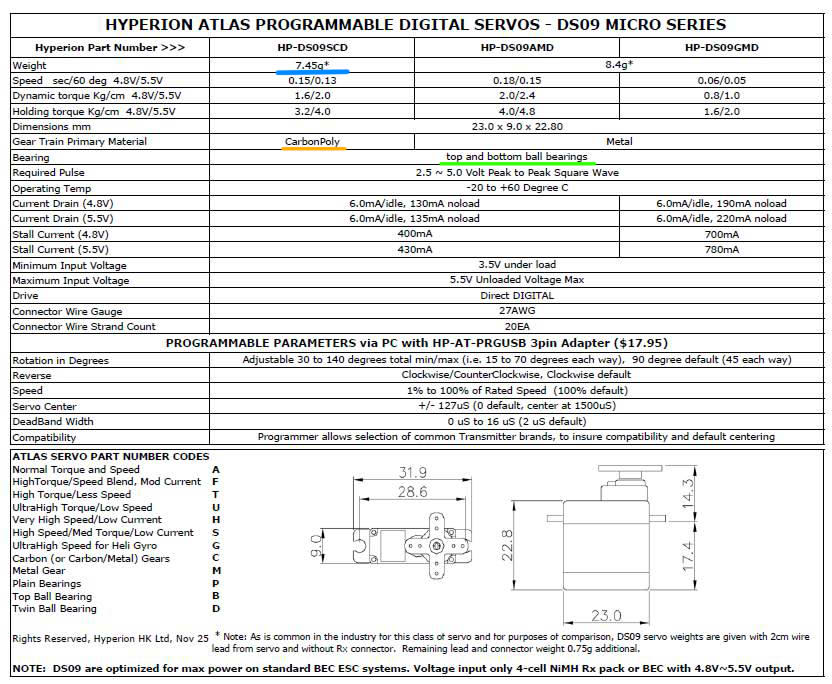
ƒJپ[ƒ{ƒ“”آ
ƒfƒWƒ^ƒ‹ƒTپ[ƒ{
ƒ{پ[ƒ‹ƒxƒAƒٹƒ“ƒO
++++++++++++++++++
090201
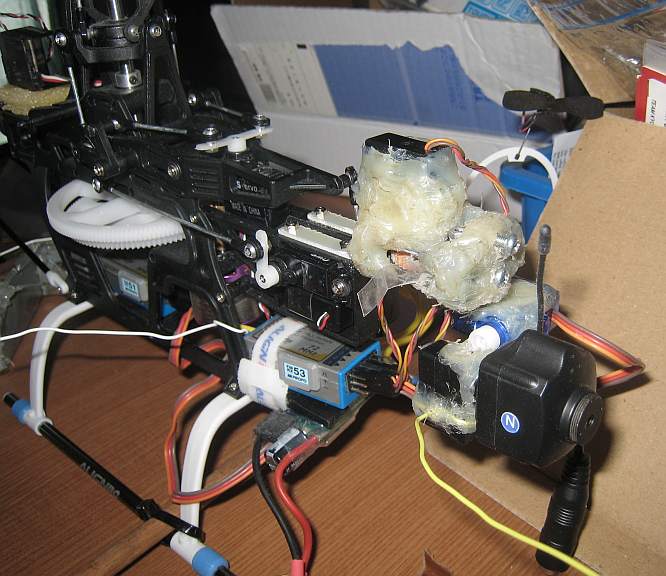
پE‰ü—اŒ^‚جŒXژخٹpŒں’mŒnƒ‚ƒWƒ…پ[ƒ‹
چs‚چs‚‚ح‚à‚ء‚ئڈ¬‚³‚‚ؤٹ®‘Sƒtƒٹپ[‚ب”ٌگعگGژ®‚ةپA
 پ—
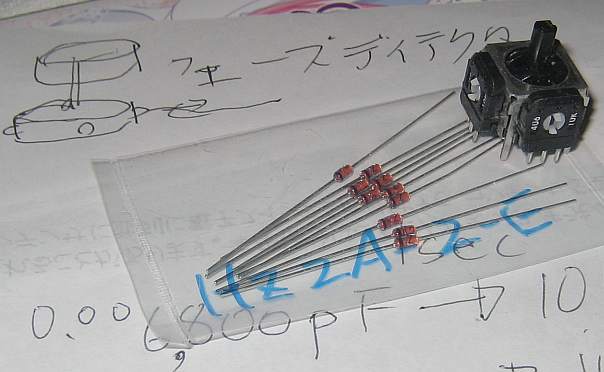
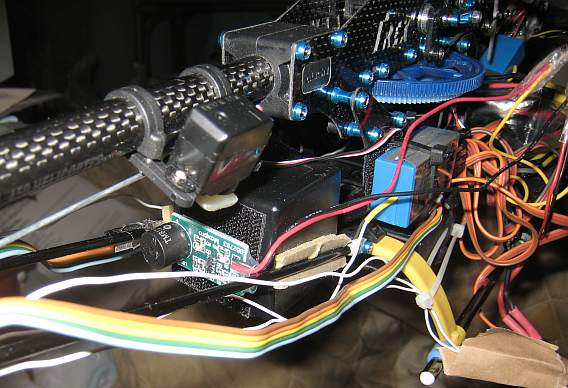
پEƒŒپ[ƒgگد•ھ—pپ@“d‰×‚جƒٹپ[ƒN‚ھ‚ئ‚ؤ‚àڈ‚ب‚¢ƒ|ƒٹƒvƒچƒsƒŒƒ“ƒRƒ“ƒfƒ“ƒTپ[(ˆêŒآ‚إ0.22ƒتF)‚ئ
پ@“ü—حƒoƒCƒAƒX“d—¬‚ھfAƒNƒ‰ƒX‚جOP-AMP
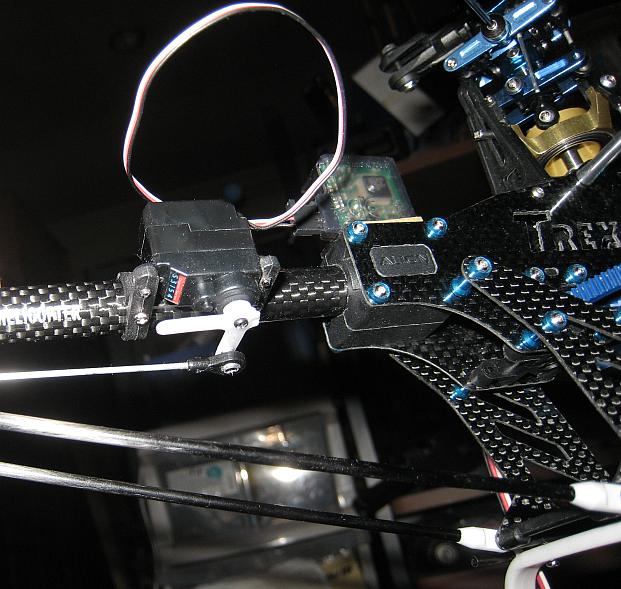
پ@‰E‚ج‚حŒم“ھ•”‚ةژو‚è•t‚¯‚ؤ‚ف‚é‚Rژ²‰ء‘¬“xƒZƒ“ƒTپ[پ@پƒˆت‘ٹŒںڈo‚ج‰ٌکHŒn‚ج•K—vƒAƒٹپB
پ—
پEƒŒپ[ƒgگد•ھ—pپ@“d‰×‚جƒٹپ[ƒN‚ھ‚ئ‚ؤ‚àڈ‚ب‚¢ƒ|ƒٹƒvƒچƒsƒŒƒ“ƒRƒ“ƒfƒ“ƒTپ[(ˆêŒآ‚إ0.22ƒتF)‚ئ
پ@“ü—حƒoƒCƒAƒX“d—¬‚ھfAƒNƒ‰ƒX‚جOP-AMP
پ@‰E‚ج‚حŒم“ھ•”‚ةژو‚è•t‚¯‚ؤ‚ف‚é‚Rژ²‰ء‘¬“xƒZƒ“ƒTپ[پ@پƒˆت‘ٹŒںڈo‚ج‰ٌکHŒn‚ج•K—vƒAƒٹپB
 پEژ‹“_گ§ŒنŒn‚ةگeژw‚إHAT-SW‚ج‚و‚¤‚ةˆµ‚¦‚é”÷“®—pƒgƒٹƒ€
پ@ƒAƒiƒچƒO“ü—ح—pPADپFSPƒٹƒ^پ[ƒ“ƒAƒٹ
پ@2V’ِ“x‚جƒcƒFƒiپ[Di‚ًژg—pپB
پEژ‹“_گ§ŒنŒn‚ةگeژw‚إHAT-SW‚ج‚و‚¤‚ةˆµ‚¦‚é”÷“®—pƒgƒٹƒ€
پ@ƒAƒiƒچƒO“ü—ح—pPADپFSPƒٹƒ^پ[ƒ“ƒAƒٹ
پ@2V’ِ“x‚جƒcƒFƒiپ[Di‚ًژg—pپB
 HATƒgƒٹƒ€‚ة‰ء‚¦‚ؤپA
ƒgƒٹƒKپ[SW‚ً”¼‰ں‚µ‚إƒfƒWƒ^ƒ‹ƒYپ[ƒ€+ƒNƒچƒXƒwƒAƒ‰ƒCƒ“پB
ƒZƒ“ƒ^پ[ƒٹƒ^پ[ƒ“SW
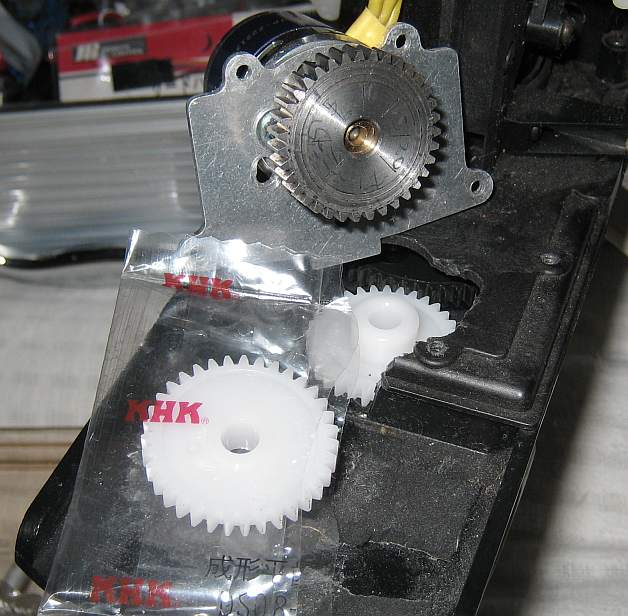
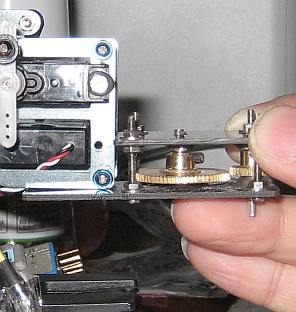
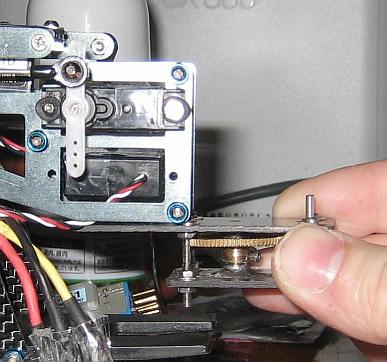
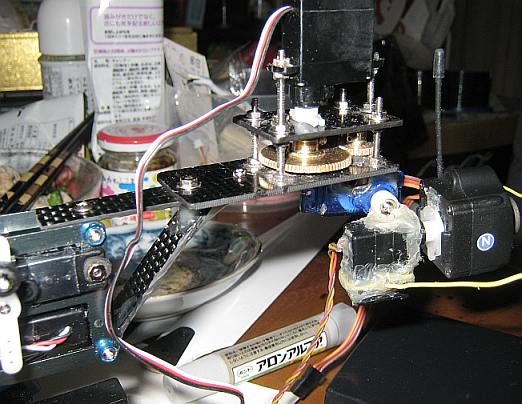
پEƒJƒپƒ‰‹ى“®Œn
پ@ƒMƒ„پF0.5ƒ‚ƒWƒ…پ[ƒ‹18t‚¨‚و‚ر56t
پ@ƒJپ[ƒ{ƒ“”آ
پ@ƒxƒAƒٹƒ“ƒO—قپFپ—100‰~‘OŒم
•ûˆتٹp•ûŒü‚ة‚حƒvƒچƒOƒ‰ƒ}ƒuƒ‹ƒfƒWƒ^ƒ‹ƒTپ[ƒ{‚ً‘g‚فچ‚ق—\’è‚إ‚·پB
HATƒgƒٹƒ€‚ة‰ء‚¦‚ؤپA
ƒgƒٹƒKپ[SW‚ً”¼‰ں‚µ‚إƒfƒWƒ^ƒ‹ƒYپ[ƒ€+ƒNƒچƒXƒwƒAƒ‰ƒCƒ“پB
ƒZƒ“ƒ^پ[ƒٹƒ^پ[ƒ“SW
پEƒJƒپƒ‰‹ى“®Œn
پ@ƒMƒ„پF0.5ƒ‚ƒWƒ…پ[ƒ‹18t‚¨‚و‚ر56t
پ@ƒJپ[ƒ{ƒ“”آ
پ@ƒxƒAƒٹƒ“ƒO—قپFپ—100‰~‘OŒم
•ûˆتٹp•ûŒü‚ة‚حƒvƒچƒOƒ‰ƒ}ƒuƒ‹ƒfƒWƒ^ƒ‹ƒTپ[ƒ{‚ً‘g‚فچ‚ق—\’è‚إ‚·پB
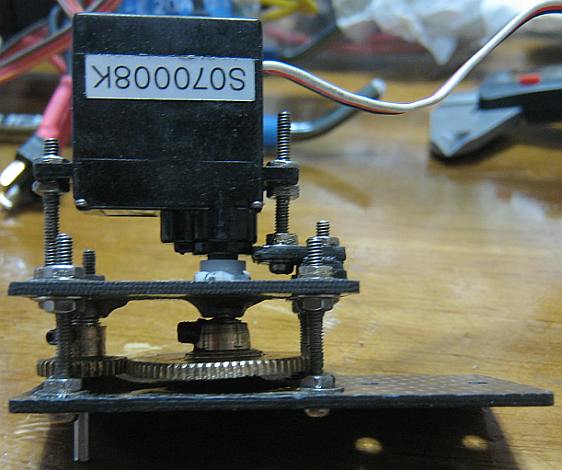
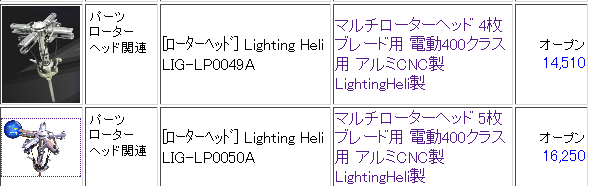
 پEMiniStudio‚ئ‚¢‚¤“ْ–{‚جƒپپ[ƒJپ[‚جƒ‚ƒm‚إ‚·پBپƒ1500‰~
پ@10g‚ئ‚¢‚¤Œy‚‚ؤ‘ه‚«‚بƒgƒ‹ƒN‚ھ“ء’¥‚إ‚·پB
پEMiniStudio‚ئ‚¢‚¤“ْ–{‚جƒپپ[ƒJپ[‚جƒ‚ƒm‚إ‚·پBپƒ1500‰~
پ@10g‚ئ‚¢‚¤Œy‚‚ؤ‘ه‚«‚بƒgƒ‹ƒN‚ھ“ء’¥‚إ‚·پB
 پ@GWS‚حQC(•iٹا‚ً’ت‚ء‚½‚ئ‚¢‚¤ˆس–،)‚ئƒVپ[ƒ‹‚ةڈ‘‚¢‚ؤ‚ ‚ء‚ؤ‚à•s—ا•i‚ج—¦‚ھŒ‹چ\چ‚‚¢‚إ‚·پB
پ@‰ء‚¦‚ؤƒTپ[ƒ{ƒzپ[ƒ“‚ج‹“x‚ھژم‚‚ؤ‚·‚®‚½‚ي‚ف‚ـ‚·پBپƒƒٹƒu‚ً“ü‚ê‚ؤچ\‘¢‹“x‚إ‚ث‚¶‚èچ„گ«‚ً‚ ‚°‚ؤ‚ظ‚µ‚¢‚إ‚·پB
پ@ƒMƒ„‚àژم‚¢‚إ‚·‚ج‚إپA”j‘¹‚µ‚â‚·‚¢‚إ‚·پB
پ@GWS‚حQC(•iٹا‚ً’ت‚ء‚½‚ئ‚¢‚¤ˆس–،)‚ئƒVپ[ƒ‹‚ةڈ‘‚¢‚ؤ‚ ‚ء‚ؤ‚à•s—ا•i‚ج—¦‚ھŒ‹چ\چ‚‚¢‚إ‚·پB
پ@‰ء‚¦‚ؤƒTپ[ƒ{ƒzپ[ƒ“‚ج‹“x‚ھژم‚‚ؤ‚·‚®‚½‚ي‚ف‚ـ‚·پBپƒƒٹƒu‚ً“ü‚ê‚ؤچ\‘¢‹“x‚إ‚ث‚¶‚èچ„گ«‚ً‚ ‚°‚ؤ‚ظ‚µ‚¢‚إ‚·پB
پ@ƒMƒ„‚àژم‚¢‚إ‚·‚ج‚إپA”j‘¹‚µ‚â‚·‚¢‚إ‚·پB
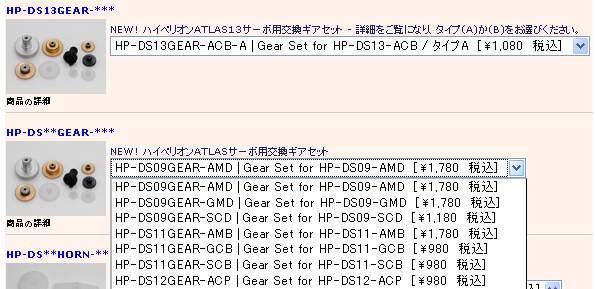
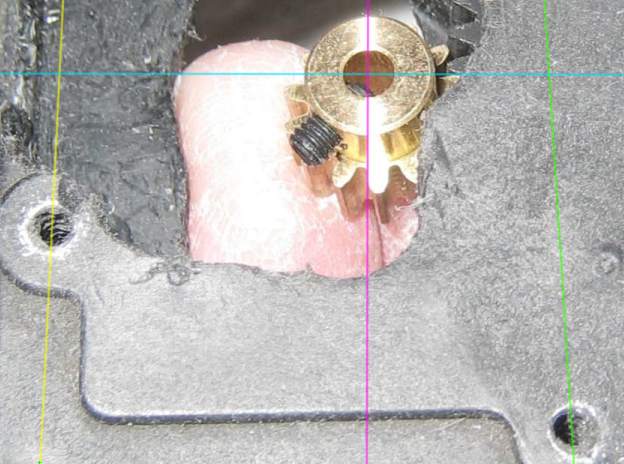
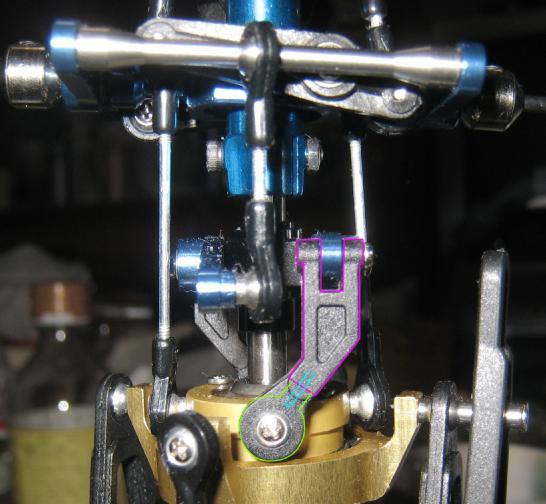
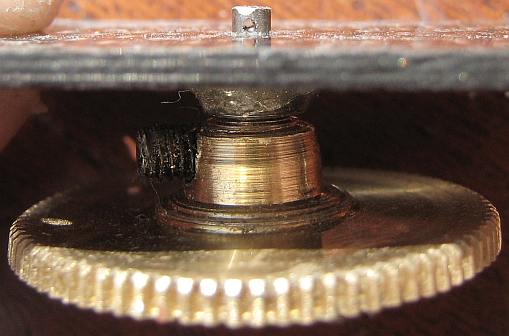
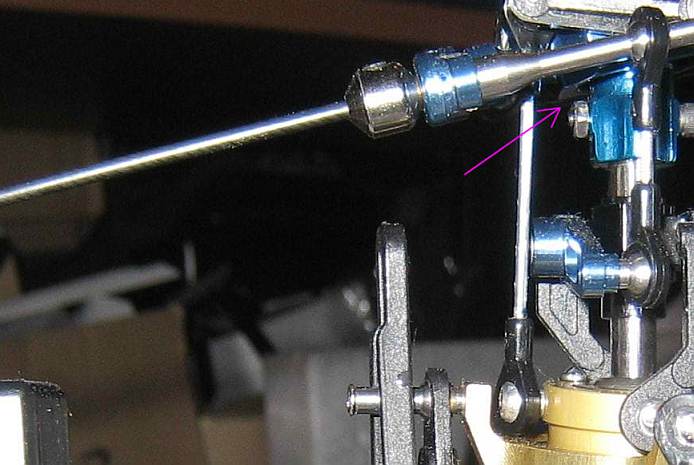
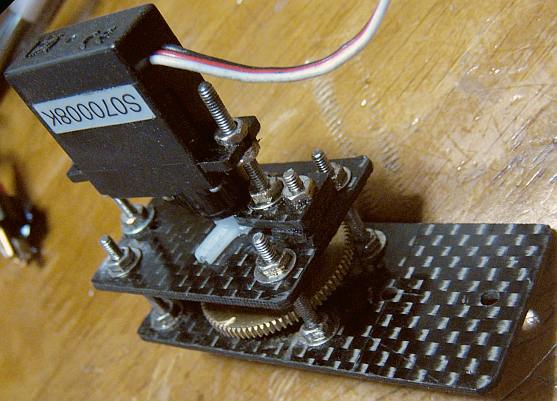
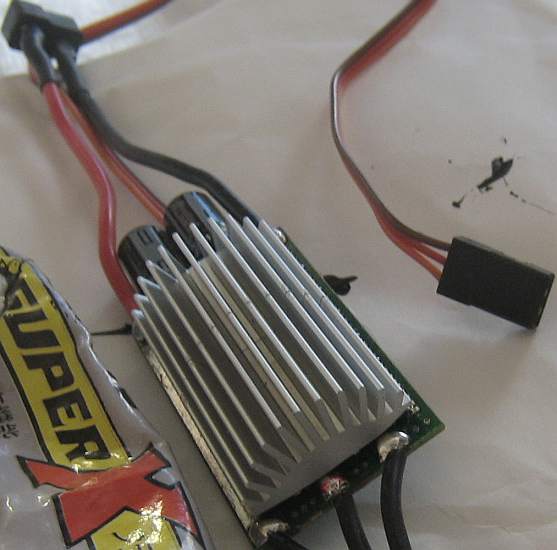
 ‰©گF‚ج•”•ھ‚ھچھ–{‚ھ‚‚ر‚ê‚ؤژم‚¢‚ج‚إچي‚ê‚ؤ‚¢‚ـ‚µ‚½پBƒRƒR‚¾‚¯ƒAƒ‹ƒ~چ‡‹à‚جژ•‚ً“U‚ك‚ؤ‚ؤ—~‚µ‚¢‚إ‚·پB
•âڈC—p‚جƒMƒ„‚حƒپپ[ƒJپ[‚©‚çڈo‚ؤ‚ـ‚·‚ج‚إ100‰~‚؟‚ه‚ء‚ئ‚إچw“ü‚إ‚«‚é‚إ‚·پB
‚¨‚»‚ç‚ڈص“ث‚ب‚ا‚إ‰َ‚ê‚é‚ج‚إٹô‚آ‚©”ƒ‚ء‚ؤ‚¨‚‚ئ‚و‚¢‚إ‚·‚ثپB
http://homepage3.nifty.com/syscom/Index.htm
‰©گF‚ج•”•ھ‚ھچھ–{‚ھ‚‚ر‚ê‚ؤژم‚¢‚ج‚إچي‚ê‚ؤ‚¢‚ـ‚µ‚½پBƒRƒR‚¾‚¯ƒAƒ‹ƒ~چ‡‹à‚جژ•‚ً“U‚ك‚ؤ‚ؤ—~‚µ‚¢‚إ‚·پB
•âڈC—p‚جƒMƒ„‚حƒپپ[ƒJپ[‚©‚çڈo‚ؤ‚ـ‚·‚ج‚إ100‰~‚؟‚ه‚ء‚ئ‚إچw“ü‚إ‚«‚é‚إ‚·پB
‚¨‚»‚ç‚ڈص“ث‚ب‚ا‚إ‰َ‚ê‚é‚ج‚إٹô‚آ‚©”ƒ‚ء‚ؤ‚¨‚‚ئ‚و‚¢‚إ‚·‚ثپB
http://homepage3.nifty.com/syscom/Index.htm
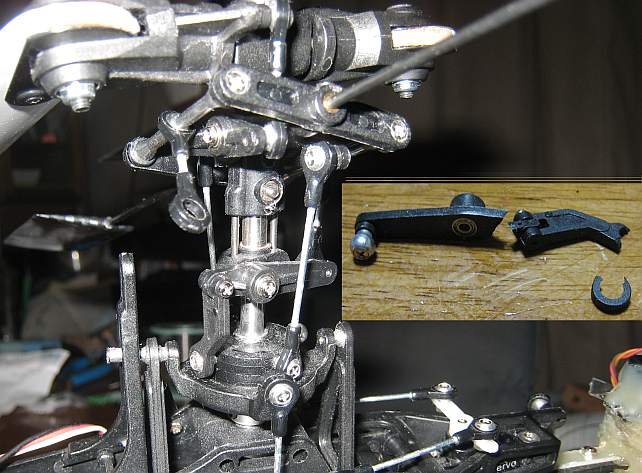
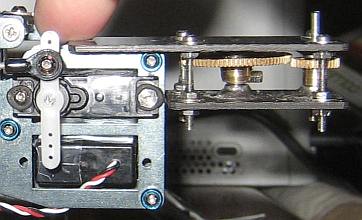
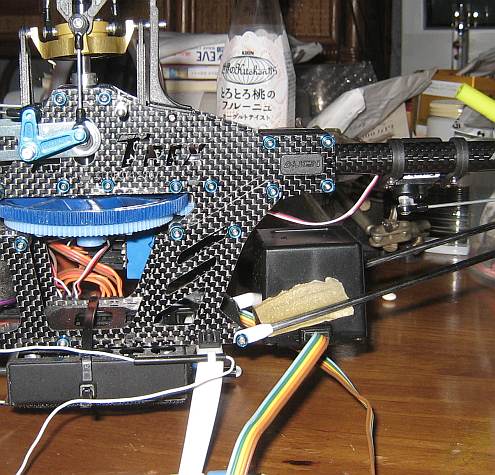
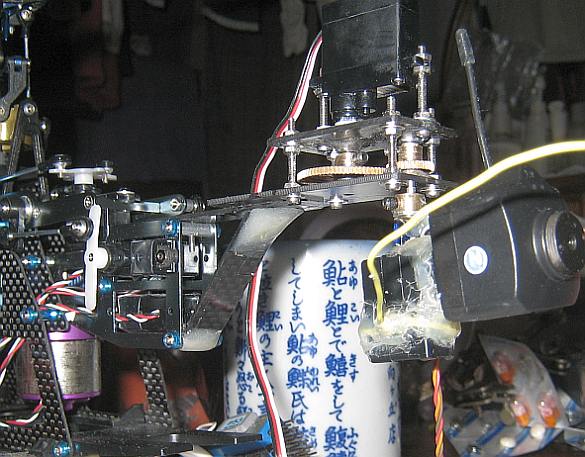
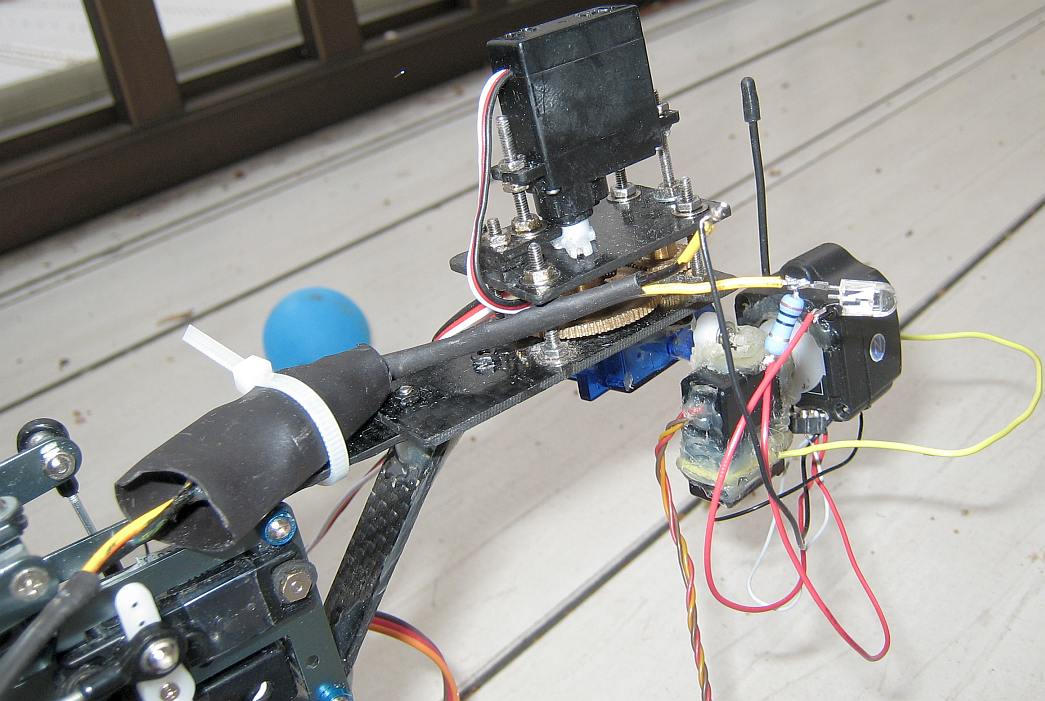
 چ¶‘¤‚ھٹp“xƒZƒ“ƒTپ[‚إ‚·پB
‚±‚جƒTپ[ƒ{ƒ‚پ[ƒ^‚إƒXƒ‰ƒCƒh’ïچR‚ئƒEƒHƒ€ƒMƒ„‚⃉ƒbƒNƒAƒ“ƒhƒsƒjƒIƒ“‚ئ‚©‚إ’¼گüˆت’uگ§Œن‚ج‰½‚©‚ة—¬—p‚إ‚«‚é‚©‚ئژv‚¢‚ـ‚·پB
چ¶‘¤‚ھٹp“xƒZƒ“ƒTپ[‚إ‚·پB
‚±‚جƒTپ[ƒ{ƒ‚پ[ƒ^‚إƒXƒ‰ƒCƒh’ïچR‚ئƒEƒHƒ€ƒMƒ„‚⃉ƒbƒNƒAƒ“ƒhƒsƒjƒIƒ“‚ئ‚©‚إ’¼گüˆت’uگ§Œن‚ج‰½‚©‚ة—¬—p‚إ‚«‚é‚©‚ئژv‚¢‚ـ‚·پB

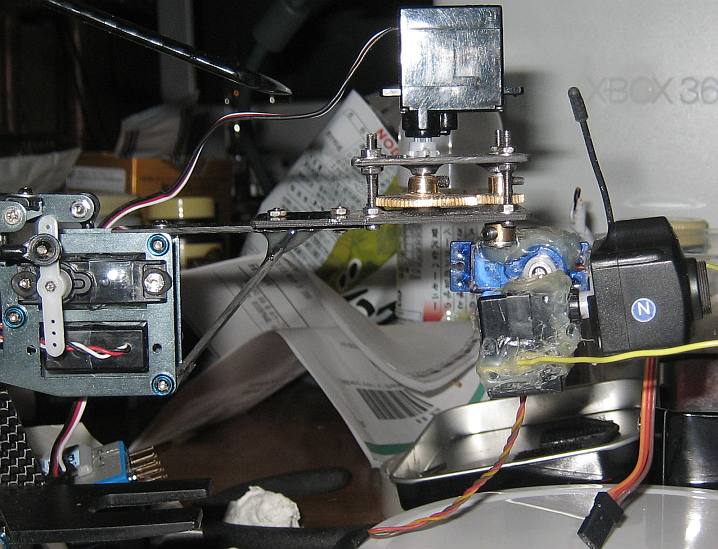
‚»‚µ‚ؤپA
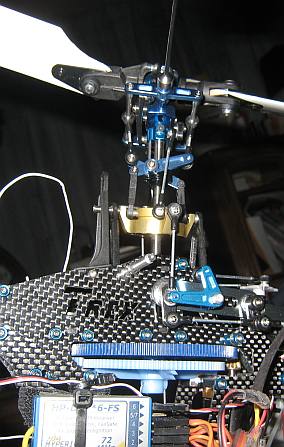
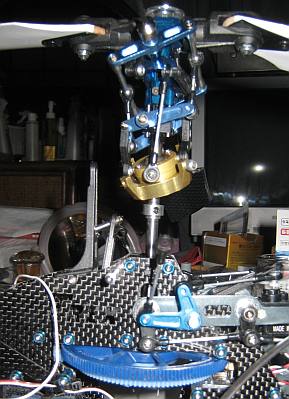
NEXUS30ˆ½‚¢‚حƒGƒ‹ƒS50+ژ©—¥ˆہ’è—p‚ج3ژ²ƒWƒƒƒCƒچ‚ة‚ؤ–{ƒ`ƒFƒbƒNپB
ƒtƒٹپ[ƒWƒƒƒCƒچ‚جڈم‚ة‰ء‘¬“xƒZƒ“ƒTپ[‚ًچع‚¹‚½ƒ‚ƒm‚ً‹@‘ج‚ة•t‚¯‚é‚ئپA
‚»‚ê‚ب‚è‚ةˆہ’è‚ةƒCƒPƒ‹‚©‚à‚إ‚·پB
090203
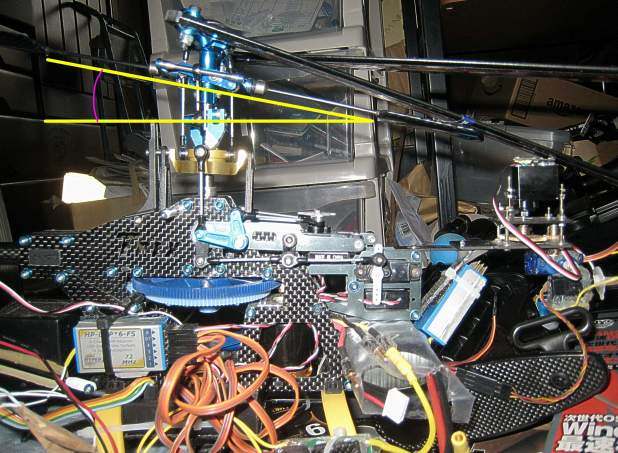
 پE‹}‚ھ‚¸‚؟‚ه‚ء‚ئ‚¸‚آ’²گ®‚ً‚µ‚ؤ‚¢‚±‚¤‚ئژv‚¢پA
پ@T-Rex‚ج”÷’²گ®‚حگو‚ةƒvƒچƒ|‚ً‚ج•û‚ًچs‚ء‚ؤ‹@‘ج‚ً•‚‚©‚¹‚ب‚ھ‚çڈ™پX‚ة•‚‚©‚¹‚é—\’è‚إ‚µ‚½‚ھپA
پ@‚¢‚«‚ب‚胂پ[ƒ^پ[‚جƒMƒ„‚ج•”•ھ‚ھ”ٍ‚ر‚ـ‚µ‚ؤپA
پ@ƒپƒCƒ“‚جƒMƒ„‚àچي‚ê‚ؤ‚ـ‚µ‚½پB
پ@‚و‚Œ©‚é‚ئپAƒپƒCƒ“ƒچپ[ƒ^پ[‚ةƒAƒ“ƒeƒiگü‚ًٹھ‚«چ‚ٌ‚إ‚¢‚ـ‚µ‚½پB
پ@ƒRƒŒ‚ة‚حŒ‹چ\‹C‚ًŒ‚ء‚ؤ‚¢‚½‚ج‚إ‚·‚ھپAƒeپ[ƒv‚إ“\‚ء‚ؤ‚¨‚‚ׂ«‚إ‚µ‚½پB
پ@‰ء‚¦‚ؤƒ~ƒLƒVƒ“ƒOƒAپ[ƒ€‚ھگـ‚ê‚ؤ‚ـ‚µ‚½پB
پ@•”•i‚حŒ‹چ\چ‚‚¢‚و‚¤‚إ‚·پB
پ@ƒxƒAƒٹƒ“ƒO‚ئƒ{پ[ƒ‹ƒٹƒ“ƒPپ[ƒW‚حچؤ—ک—pڈo—ˆ‚é‚ج‚إ—v‚ç‚ب‚¢‚إ‚·پB
پ@ƒXƒچƒbƒgƒ‹‚©‚çڈd‚¢ƒMƒ„‚¾‚ئپAƒ€ƒ_‚ة“d—¬’l‚ھچ‚‚‚ب‚邾‚¯‚إ‚·‚ج‚إپA
پ@ڈC—‚آ‚¢‚إ‚ةƒ‚پ[ƒ^پ[‚جƒMƒ„‚ً10T‚©‚ç9T‚ة‚µ‚ؤƒMƒ„‚إچ‚‰ٌ“]‚إ–³—‚ب‚‚ئ‚خ‚¹‚é‚و‚¤‚ةگف’è‚إ‚·پBپƒ’A‚µپAƒsƒjƒIƒ“‚حڈ¬‚³‚¢‚ظ‚اژ•‚ج•‰’S‚ھ‘ه‚«‚¢‚µچ\‘¢‚àژم‚‚ب‚é‚إ‚·پB
پ@“dŒ¹“dˆ³‚ً‰؛‚°‚ؤپA•t‘®‚ج’·‚ك‚جƒOƒ‰ƒXƒچپ[ƒ^پ[‚ًژg‚¤‚ج‚à—ا‚¢‚©‚àپB
پ@
پ@1820kv(2980‰~‚‚ç‚¢)‚جƒ‚پ[ƒ^پ[‚ة15T‚جƒMƒ„‚ھ‰¸‚â‚©‚إ—ا‚¢‚ئ‚àژv‚¢‚ـ‚µ‚½پB
پ@ڈêچ‡‚ة‚و‚ء‚ؤ‚ح16پ`18T‚ج0.5ƒ‚ƒWƒ…پ[ƒ‹ƒMƒ„‚ة‚µ‚ؤ‚à—ا‚¢‚©‚àپA
پ@‚ـ‚ پA‚؟‚ر‚؟‚ر‚ئ‚â‚ء‚ؤپA
پ@پ@پ@پ@“TŒ^“I‚بڈ¬‚³‚بƒgƒ‰ƒuƒ‹‚ح‘پ‚ك‚ةŒ©‚آ‚¯‚½‚è–،‚ي‚ء‚ؤچs‚‚ج‚à—ا‚¢‚ئژv‚¢‚ـ‚µ‚½پB
پEEPƒRƒ“ƒZƒvƒg‚جƒMƒ„‚ح0.75ƒ‚ƒWƒ…پ[ƒ‹‚جƒXƒeƒ“ƒŒƒXƒMƒ„‚ج—\’è‚إ‚µ‚½‚ھپA40g‚ئ‚¢‚¤ڈd‚³‚ب‚ج‚إپA
پ@0.8ƒ‚ƒWƒ…پ[ƒ‹ƒMƒ„(2g)‚جƒMƒ„‚ة•دچX—\’è‚إ‚·پB
پ@ƒAƒ‹ƒ~‚ب‚ا‚جژ²‚ة‘}“ü–ت‚ً‚إ‚±‚ع‚±‚ً•t‚¯‚ؤƒGƒ|ƒLƒV‚إ‚‚ء‚آ‚¯‚ـ‚·پB
پE‹}‚ھ‚¸‚؟‚ه‚ء‚ئ‚¸‚آ’²گ®‚ً‚µ‚ؤ‚¢‚±‚¤‚ئژv‚¢پA
پ@T-Rex‚ج”÷’²گ®‚حگو‚ةƒvƒچƒ|‚ً‚ج•û‚ًچs‚ء‚ؤ‹@‘ج‚ً•‚‚©‚¹‚ب‚ھ‚çڈ™پX‚ة•‚‚©‚¹‚é—\’è‚إ‚µ‚½‚ھپA
پ@‚¢‚«‚ب‚胂پ[ƒ^پ[‚جƒMƒ„‚ج•”•ھ‚ھ”ٍ‚ر‚ـ‚µ‚ؤپA
پ@ƒپƒCƒ“‚جƒMƒ„‚àچي‚ê‚ؤ‚ـ‚µ‚½پB
پ@‚و‚Œ©‚é‚ئپAƒپƒCƒ“ƒچپ[ƒ^پ[‚ةƒAƒ“ƒeƒiگü‚ًٹھ‚«چ‚ٌ‚إ‚¢‚ـ‚µ‚½پB
پ@ƒRƒŒ‚ة‚حŒ‹چ\‹C‚ًŒ‚ء‚ؤ‚¢‚½‚ج‚إ‚·‚ھپAƒeپ[ƒv‚إ“\‚ء‚ؤ‚¨‚‚ׂ«‚إ‚µ‚½پB
پ@‰ء‚¦‚ؤƒ~ƒLƒVƒ“ƒOƒAپ[ƒ€‚ھگـ‚ê‚ؤ‚ـ‚µ‚½پB
پ@•”•i‚حŒ‹چ\چ‚‚¢‚و‚¤‚إ‚·پB
پ@ƒxƒAƒٹƒ“ƒO‚ئƒ{پ[ƒ‹ƒٹƒ“ƒPپ[ƒW‚حچؤ—ک—pڈo—ˆ‚é‚ج‚إ—v‚ç‚ب‚¢‚إ‚·پB
پ@ƒXƒچƒbƒgƒ‹‚©‚çڈd‚¢ƒMƒ„‚¾‚ئپAƒ€ƒ_‚ة“d—¬’l‚ھچ‚‚‚ب‚邾‚¯‚إ‚·‚ج‚إپA
پ@ڈC—‚آ‚¢‚إ‚ةƒ‚پ[ƒ^پ[‚جƒMƒ„‚ً10T‚©‚ç9T‚ة‚µ‚ؤƒMƒ„‚إچ‚‰ٌ“]‚إ–³—‚ب‚‚ئ‚خ‚¹‚é‚و‚¤‚ةگف’è‚إ‚·پBپƒ’A‚µپAƒsƒjƒIƒ“‚حڈ¬‚³‚¢‚ظ‚اژ•‚ج•‰’S‚ھ‘ه‚«‚¢‚µچ\‘¢‚àژم‚‚ب‚é‚إ‚·پB
پ@“dŒ¹“dˆ³‚ً‰؛‚°‚ؤپA•t‘®‚ج’·‚ك‚جƒOƒ‰ƒXƒچپ[ƒ^پ[‚ًژg‚¤‚ج‚à—ا‚¢‚©‚àپB
پ@
پ@1820kv(2980‰~‚‚ç‚¢)‚جƒ‚پ[ƒ^پ[‚ة15T‚جƒMƒ„‚ھ‰¸‚â‚©‚إ—ا‚¢‚ئ‚àژv‚¢‚ـ‚µ‚½پB
پ@ڈêچ‡‚ة‚و‚ء‚ؤ‚ح16پ`18T‚ج0.5ƒ‚ƒWƒ…پ[ƒ‹ƒMƒ„‚ة‚µ‚ؤ‚à—ا‚¢‚©‚àپA
پ@‚ـ‚ پA‚؟‚ر‚؟‚ر‚ئ‚â‚ء‚ؤپA
پ@پ@پ@پ@“TŒ^“I‚بڈ¬‚³‚بƒgƒ‰ƒuƒ‹‚ح‘پ‚ك‚ةŒ©‚آ‚¯‚½‚è–،‚ي‚ء‚ؤچs‚‚ج‚à—ا‚¢‚ئژv‚¢‚ـ‚µ‚½پB
پEEPƒRƒ“ƒZƒvƒg‚جƒMƒ„‚ح0.75ƒ‚ƒWƒ…پ[ƒ‹‚جƒXƒeƒ“ƒŒƒXƒMƒ„‚ج—\’è‚إ‚µ‚½‚ھپA40g‚ئ‚¢‚¤ڈd‚³‚ب‚ج‚إپA
پ@0.8ƒ‚ƒWƒ…پ[ƒ‹ƒMƒ„(2g)‚جƒMƒ„‚ة•دچX—\’è‚إ‚·پB
پ@ƒAƒ‹ƒ~‚ب‚ا‚جژ²‚ة‘}“ü–ت‚ً‚إ‚±‚ع‚±‚ً•t‚¯‚ؤƒGƒ|ƒLƒV‚إ‚‚ء‚آ‚¯‚ـ‚·پB

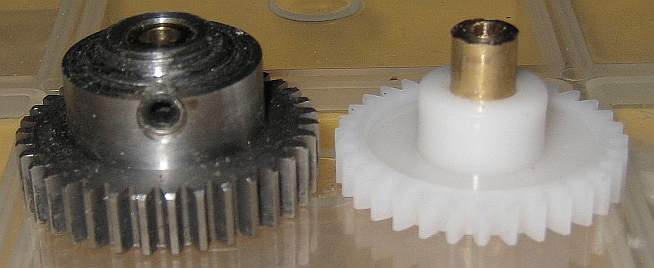
 ‹‚’÷‚ك•t‚¯‚é‚و‚è‚àپA
ƒ‚پ[ƒ^پ[‚جƒVƒƒƒtƒg‚ة‚ض‚±‚ف‚ً•t‚¯‚ؤپAƒlƒW‚ًƒlƒWژ~‚ك‚µ‚½•û‚ھ‚و‚³‚»‚¤‚إ‚·پB
پ@ƒ‚ƒWƒ…پ[ƒ‹‚ھ‘ه‚«‚¢‚±‚ئ‚ح”¼Œa‚à‘ه‚«‚‚ب‚è‚ـ‚·پB
پ@‚µ‚©‚µپA
ƒgƒ‹ƒN‚حƒeƒR‚جŒ´—‚إ‚·‚ھپA
پ@ƒMƒ„”ن‚ھ•د‚ي‚ç‚ب‚¢‚إ‚·‚ج‚إپA
پ@ƒgƒ‹ƒN‚ج“`’B‚ھˆ«‚‚ب‚é‚©‚à‚µ‚ê‚ب‚¢‚إ‚·پB
’چ•¶پFƒAƒ‹ƒ~گ»ƒ~ƒLƒVƒ“ƒOƒAپ[ƒ€‚ئƒپƒCƒ“ƒMƒ„پB
پ@پ@پ@‚آ‚¢‚إ‚ةپAƒfƒWƒ^ƒ‹ƒTپ[ƒ{پB
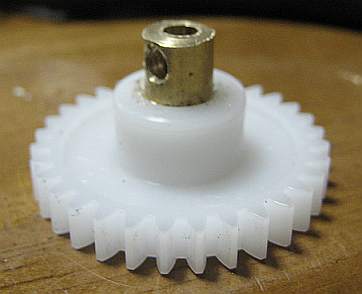
ƒJƒپƒ‰‹ى“®•”•ھ‚ة0.3ƒ‚ƒWƒ…پ[ƒ‹‚جƒMƒ„‚ًŒں“¢‚ج‚½‚كگ^èJگ»‚جƒMƒ„پB
‹“x•s‘«‚ب‚çپA
گ^èJ‚جژ²‚ًƒAƒ‹ƒ~چ‡‹à‚ة•د‚¦‚ؤ
ƒXƒeƒ“ƒŒƒX‚جƒMƒ„‚ً“÷”²‚«‚·‚é‚ئ—ا‚¢‚و‚¤‚ب‹C‚ـ‚µ‚ـ‚µ‚½پB
پEkv’l‚ئƒ‚پ[ƒ^پ[‚جچ\‘¢‚ة‚آ‚¢‚ؤپB
‰ٌ“]•ûŒü‚ة‚½‚¢‚·‚éƒXƒeƒbƒv‚ج–§“x
ƒ}ƒOƒlƒbƒg‚ئƒAپ[ƒ€گ”‚ة‚و‚é•”•ھ‚ھژه‘ج‚ج‚ح‚¸‚ب‚ج‚إ‚·‚ھپA
گ§Œن‚³‚ê‚ؤ‚ب‚¢‚إ‚·‚ج‚إپAٹھ‚«گ”‚ة‚و‚é•”•ھ‚à‚ ‚è‚ـ‚·پB
‹‚’÷‚ك•t‚¯‚é‚و‚è‚àپA
ƒ‚پ[ƒ^پ[‚جƒVƒƒƒtƒg‚ة‚ض‚±‚ف‚ً•t‚¯‚ؤپAƒlƒW‚ًƒlƒWژ~‚ك‚µ‚½•û‚ھ‚و‚³‚»‚¤‚إ‚·پB
پ@ƒ‚ƒWƒ…پ[ƒ‹‚ھ‘ه‚«‚¢‚±‚ئ‚ح”¼Œa‚à‘ه‚«‚‚ب‚è‚ـ‚·پB
پ@‚µ‚©‚µپA
ƒgƒ‹ƒN‚حƒeƒR‚جŒ´—‚إ‚·‚ھپA
پ@ƒMƒ„”ن‚ھ•د‚ي‚ç‚ب‚¢‚إ‚·‚ج‚إپA
پ@ƒgƒ‹ƒN‚ج“`’B‚ھˆ«‚‚ب‚é‚©‚à‚µ‚ê‚ب‚¢‚إ‚·پB
’چ•¶پFƒAƒ‹ƒ~گ»ƒ~ƒLƒVƒ“ƒOƒAپ[ƒ€‚ئƒپƒCƒ“ƒMƒ„پB
پ@پ@پ@‚آ‚¢‚إ‚ةپAƒfƒWƒ^ƒ‹ƒTپ[ƒ{پB
ƒJƒپƒ‰‹ى“®•”•ھ‚ة0.3ƒ‚ƒWƒ…پ[ƒ‹‚جƒMƒ„‚ًŒں“¢‚ج‚½‚كگ^èJگ»‚جƒMƒ„پB
‹“x•s‘«‚ب‚çپA
گ^èJ‚جژ²‚ًƒAƒ‹ƒ~چ‡‹à‚ة•د‚¦‚ؤ
ƒXƒeƒ“ƒŒƒX‚جƒMƒ„‚ً“÷”²‚«‚·‚é‚ئ—ا‚¢‚و‚¤‚ب‹C‚ـ‚µ‚ـ‚µ‚½پB
پEkv’l‚ئƒ‚پ[ƒ^پ[‚جچ\‘¢‚ة‚آ‚¢‚ؤپB
‰ٌ“]•ûŒü‚ة‚½‚¢‚·‚éƒXƒeƒbƒv‚ج–§“x
ƒ}ƒOƒlƒbƒg‚ئƒAپ[ƒ€گ”‚ة‚و‚é•”•ھ‚ھژه‘ج‚ج‚ح‚¸‚ب‚ج‚إ‚·‚ھپA
گ§Œن‚³‚ê‚ؤ‚ب‚¢‚إ‚·‚ج‚إپAٹھ‚«گ”‚ة‚و‚é•”•ھ‚à‚ ‚è‚ـ‚·پB

 –ع•WپF
ٹ®‘Sƒtƒٹپ[ƒWƒƒƒCƒچٹژ‚آƒRƒ“ƒpƒNƒg‰»
‰ٌ“]‚ح•K—vڈ\•ھپBڈd‚¢‘fچق‚ج‰~”ص
ƒJپ[ƒ{ƒ“ƒuƒ‰ƒVپ¨ƒuƒ‰ƒVƒŒƒX—¬‘جژ²ژَ‚¯ƒ‚پ[ƒ^پ[+ƒtƒچپ[ƒeƒBƒ“ƒOƒ}ƒEƒ“ƒgپB
–€ژC–تگد‚ج’لŒ¸(گj‚ج‚و‚¤‚ة)
”ٌگعگGŒں’m(“dژ¥‹CŒn“پH)
–ع•WپF
ٹ®‘Sƒtƒٹپ[ƒWƒƒƒCƒچٹژ‚آƒRƒ“ƒpƒNƒg‰»
‰ٌ“]‚ح•K—vڈ\•ھپBڈd‚¢‘fچق‚ج‰~”ص
ƒJپ[ƒ{ƒ“ƒuƒ‰ƒVپ¨ƒuƒ‰ƒVƒŒƒX—¬‘جژ²ژَ‚¯ƒ‚پ[ƒ^پ[+ƒtƒچپ[ƒeƒBƒ“ƒOƒ}ƒEƒ“ƒgپB
–€ژC–تگد‚ج’لŒ¸(گj‚ج‚و‚¤‚ة)
”ٌگعگGŒں’m(“dژ¥‹CŒn“پH)
 ƒJƒپƒ‰‚ج•ûˆتٹpگ§Œن—p‚جƒMƒ„‚جŒٹ‚ًڈ¬‚³‚‚·‚é‚إ‚·پB
ƒJƒپƒ‰‚ج•ûˆتٹpگ§Œن—p‚جƒMƒ„‚جŒٹ‚ًڈ¬‚³‚‚·‚é‚إ‚·پB

 090205
پET-Rex‚جƒ‚پ[ƒ^پ[‚جŒًٹ·پBپƒ‘ه•د‹êکJ‚µ‚ـ‚µ‚½پB
--t-rex.html--
090205
پET-Rex‚جƒ‚پ[ƒ^پ[‚جŒًٹ·پBپƒ‘ه•د‹êکJ‚µ‚ـ‚µ‚½پB
--t-rex.html--
پƒ‚؟‚ه‚ء‚ئ•ھٹ„
090209

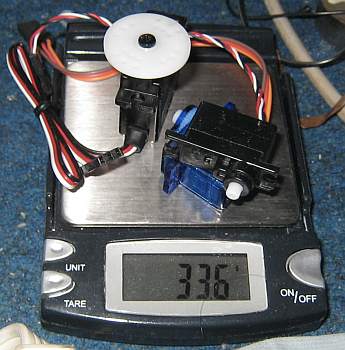
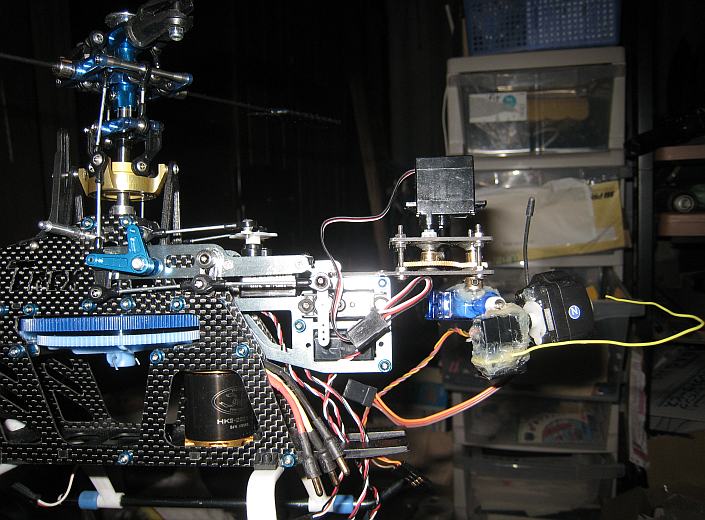
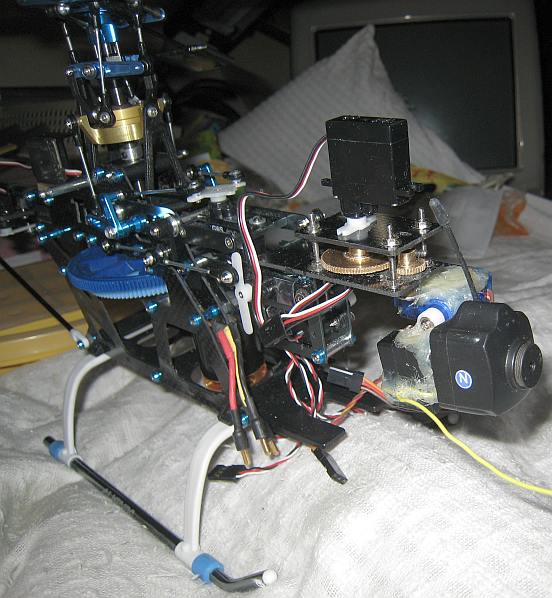
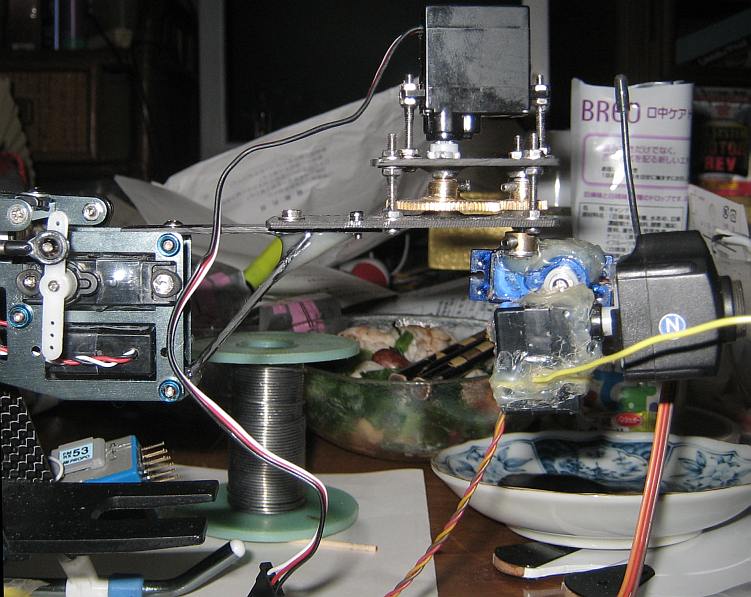
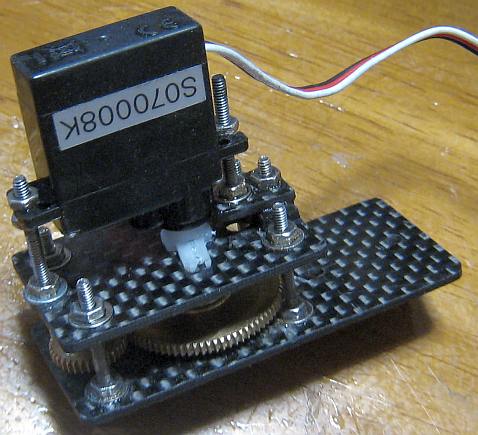
 ƒJƒپƒ‰‹ى“®—p‚جƒTپ[ƒ{‚ًڈW‚ك‚½ڈd‚³‚إ‚·پB
ƒfƒWƒ^ƒ‹ƒTپ[ƒ{‚حگ¸–§‚إ•غژ—ح‚ھگ§Œن—p‚ج“®“Iƒgƒ‹ƒN‚ج”{‹ك‚‚ ‚è‚ـ‚·پB
ƒvƒچƒOƒ‰ƒ~ƒ“ƒO‚ة‚و‚ء‚ؤچإ‘ه140پ‹‚ـ‚إ“®‚«‚ـ‚·پBپƒƒRƒR‚àƒ|ƒCƒ“ƒg‚إ‚·پB
ƒJƒپƒ‰‹ى“®—p‚جƒTپ[ƒ{‚ًڈW‚ك‚½ڈd‚³‚إ‚·پB
ƒfƒWƒ^ƒ‹ƒTپ[ƒ{‚حگ¸–§‚إ•غژ—ح‚ھگ§Œن—p‚ج“®“Iƒgƒ‹ƒN‚ج”{‹ك‚‚ ‚è‚ـ‚·پB
ƒvƒچƒOƒ‰ƒ~ƒ“ƒO‚ة‚و‚ء‚ؤچإ‘ه140پ‹‚ـ‚إ“®‚«‚ـ‚·پBپƒƒRƒR‚àƒ|ƒCƒ“ƒg‚إ‚·پB
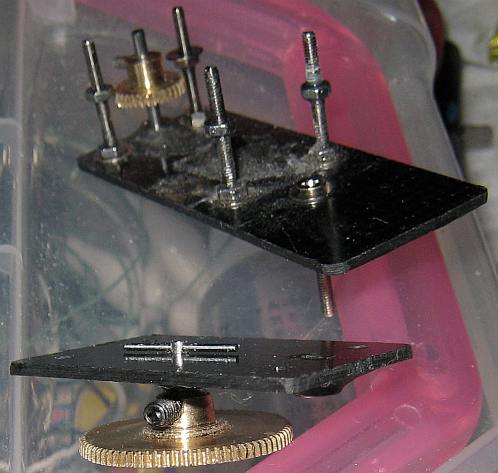
 DS12
ƒxƒAƒٹƒ“ƒO‚ئ
ƒJƒپƒ‰‹ى“®—p‚ج0.3ƒ‚ƒWƒ…پ[ƒ‹‚جƒMƒ„‚ب‚ج‚إ‚·‚ھپA
گ^èJ‚إ‚·‚ج‚إڈd‚¢‚إ‚·‚ج‚إپA
‚ـ‚¸“÷”²‚«‚µ‚ؤپA
ژں‚ة
گîڈَ‚ةگط‚ء‚ؤژg‚¨‚¤‚ئژv‚¢‚ـ‚·پBپ@پƒ‚Q”{‚إ‚¨“¾‚إ‚·پB
DS12
ƒxƒAƒٹƒ“ƒO‚ئ
ƒJƒپƒ‰‹ى“®—p‚ج0.3ƒ‚ƒWƒ…پ[ƒ‹‚جƒMƒ„‚ب‚ج‚إ‚·‚ھپA
گ^èJ‚إ‚·‚ج‚إڈd‚¢‚إ‚·‚ج‚إپA
‚ـ‚¸“÷”²‚«‚µ‚ؤپA
ژں‚ة
گîڈَ‚ةگط‚ء‚ؤژg‚¨‚¤‚ئژv‚¢‚ـ‚·پBپ@پƒ‚Q”{‚إ‚¨“¾‚إ‚·پB
 ژ•‚ج“à‘¤‚ً‘S•”‚‚è‚ت‚¢‚ؤژ÷ژ‰‚ج‰~”ص‚ً“U‚ك‚é‚ئ‚©پA
ƒJپ[ƒ{ƒ“‚ب‚ا‚ً–„–v‚³‚¹‚½ڈم‚إژ÷ژ‰‚إŒ^ژو‚è‚·‚ê‚خچX‚ة—ا‚¢‚ج‚إ‚·‚ھپA
‚³‚·‚ھ‚ة–ت“|‚إ‚·پBپB
ƒJپ[ƒ{ƒ“‘fچق‚à—]‚è‚ـ‚·‚ج‚إپA
چX‚ة‚¨‚ب‚¶ƒ‚ƒWƒ…پ[ƒ‹‚إٹô‚آ‚©‚جژ•گ”‚ً’چ•¶‚µ‚ـ‚µ‚½پB
ڈ¬Œ^‹@—p‚ئ‘هŒ^‹@—p‚ة•ھ‚¯‚و‚¤‚ئژv‚¢‚ـ‚·پB
“ٌ–‡‚جƒJپ[ƒ{ƒ“”آ‚ج‚آ‚ب‚¬‚حگ¸–§‚³‚ئ‹“x‚ھ•K—v‚إ‚·پB
ƒvƒ‰ƒ‚ƒfƒ‹‚ج‚و‚¤‚بƒCƒپپ[ƒW‚إƒpƒCƒv‚ً“ü‚êژqڈَ‚ة‚µ‚ؤƒnƒپ‚ ‚¢‚ة‚µ‚ؤپA
ƒZƒ“ƒ^پ[‚ًƒlƒW‚إŒإ’肵‚و‚¤‚ئژv‚¢‚ـ‚·پB
090210
ƒsƒbƒ`‚ئƒXƒچƒbƒgƒ‹‚جٹضŒW‚حپA
ƒsƒbƒ`ƒQپ[ƒW‚إŒˆ‚ك‚ؤپAƒ‚پ[ƒ^پ[‚àƒeƒLƒgپ[‚ةŒˆ‚ك‚½ڈم‚إپA
ƒsƒbƒ`‚ج‹–‚·ƒچپ[ƒ^پ[‰ٌ“]گ”‚ًگو‚ةŒˆ‚ك
‚»‚êˆبٹO‚ةƒeپ[ƒ‹‚جƒZƒ“ƒ^پ[ˆت’u‚ة–³—‚ھڈo‚ب‚¢‚و‚¤‚ة‚·‚é‚ج‚ھƒAƒ‹’ِ“x‚ج”»’f”»’fچق—؟‚إ‚·‚ثپBپB
ژ•‚ج“à‘¤‚ً‘S•”‚‚è‚ت‚¢‚ؤژ÷ژ‰‚ج‰~”ص‚ً“U‚ك‚é‚ئ‚©پA
ƒJپ[ƒ{ƒ“‚ب‚ا‚ً–„–v‚³‚¹‚½ڈم‚إژ÷ژ‰‚إŒ^ژو‚è‚·‚ê‚خچX‚ة—ا‚¢‚ج‚إ‚·‚ھپA
‚³‚·‚ھ‚ة–ت“|‚إ‚·پBپB
ƒJپ[ƒ{ƒ“‘fچق‚à—]‚è‚ـ‚·‚ج‚إپA
چX‚ة‚¨‚ب‚¶ƒ‚ƒWƒ…پ[ƒ‹‚إٹô‚آ‚©‚جژ•گ”‚ً’چ•¶‚µ‚ـ‚µ‚½پB
ڈ¬Œ^‹@—p‚ئ‘هŒ^‹@—p‚ة•ھ‚¯‚و‚¤‚ئژv‚¢‚ـ‚·پB
“ٌ–‡‚جƒJپ[ƒ{ƒ“”آ‚ج‚آ‚ب‚¬‚حگ¸–§‚³‚ئ‹“x‚ھ•K—v‚إ‚·پB
ƒvƒ‰ƒ‚ƒfƒ‹‚ج‚و‚¤‚بƒCƒپپ[ƒW‚إƒpƒCƒv‚ً“ü‚êژqڈَ‚ة‚µ‚ؤƒnƒپ‚ ‚¢‚ة‚µ‚ؤپA
ƒZƒ“ƒ^پ[‚ًƒlƒW‚إŒإ’肵‚و‚¤‚ئژv‚¢‚ـ‚·پB
090210
ƒsƒbƒ`‚ئƒXƒچƒbƒgƒ‹‚جٹضŒW‚حپA
ƒsƒbƒ`ƒQپ[ƒW‚إŒˆ‚ك‚ؤپAƒ‚پ[ƒ^پ[‚àƒeƒLƒgپ[‚ةŒˆ‚ك‚½ڈم‚إپA
ƒsƒbƒ`‚ج‹–‚·ƒچپ[ƒ^پ[‰ٌ“]گ”‚ًگو‚ةŒˆ‚ك
‚»‚êˆبٹO‚ةƒeپ[ƒ‹‚جƒZƒ“ƒ^پ[ˆت’u‚ة–³—‚ھڈo‚ب‚¢‚و‚¤‚ة‚·‚é‚ج‚ھƒAƒ‹’ِ“x‚ج”»’f”»’fچق—؟‚إ‚·‚ثپBپB
 ƒ‚پ[ƒ^‚ج‰ء”M‚ح–w‚اٹ´‚¶‚ç‚ê‚ـ‚¹‚ٌ‚إ‚µ‚½پB
‚إپA
‰½“x‚©•‚ڈم‚³‚¹‚ب‚ھ‚ç’²گ®‚µ‚ؤ
‚¨‚낵‚½‚ئ‚«پAڈ°‚ة‚؟‚ه‚ء‚ئ‚©‚·‚ء‚½‚¾‚¯‚إپAƒeپ[ƒ‹ƒuƒŒپ[ƒh‚ھگـ‚ê‚ـ‚µ‚½پB
پE‘خڈˆ‚ئ‚µ‚ؤ‚ح”ِ—ƒ‚ةƒKپ[ƒh‚ً•t‚¯‚éپB
پEƒJپ[ƒ{ƒ“ƒuƒŒپ[ƒh‚ة‚·‚éپB
‚ئ‚¢‚¤‚±‚ئ‚ة‚ب‚é‚ج‚إ‚·‚ھپA
ƒJپ[ƒ{ƒ“‚ة‚·‚é‚ئچھ–{‚ھ‰َ‚ê‚â‚·‚¢‚إ‚·‚ج‚إپA
ƒKپ[ƒh‚ً•t‚¯‚½ڈم‚إپA
ƒeپ[ƒ‹‚ً‹à‘®•”•i‚ة‚µ‚ؤˆê”شˆہ‚¢ƒuƒŒپ[ƒh‚ً•t‚¯‚é‚ئ‚µ‚ؤ’چ•¶‚µ‚ـ‚µ‚½پB
‚±‚ج‹@‘ج‚جژ÷ژ‰‚حگـ‚ê‚â‚·‚¢‚و‚¤‚إ‚·پB
NEXUS‚جƒuƒŒپ[ƒh
‚ث‚؟‚ء‚±‚‚ء‚ؤگـ‚ê‚ة‚‚¢‚ج‚إ‚·‚ھپA
EPƒRƒ“ƒZƒvƒg‚جڈم‚جƒtƒŒپ[ƒ€‚ح‹èص‚إ‚·‚µپA
‹ڈ¤‚جƒJƒEƒ‹‚حŒْ‚‚ؤ‚à”نڈd‚ھڈ¬‚³‚¢‚½‚ك‚©‚ب‚èŒy‚¢‚إ‚·پB
ƒJپ[ƒ{ƒ“FRP‚ج”نڈd‚àŒ©‚ؤ‚ف‚½‚¢‚إ‚·پB
ƒ‚پ[ƒ^‚ج‰ء”M‚ح–w‚اٹ´‚¶‚ç‚ê‚ـ‚¹‚ٌ‚إ‚µ‚½پB
‚إپA
‰½“x‚©•‚ڈم‚³‚¹‚ب‚ھ‚ç’²گ®‚µ‚ؤ
‚¨‚낵‚½‚ئ‚«پAڈ°‚ة‚؟‚ه‚ء‚ئ‚©‚·‚ء‚½‚¾‚¯‚إپAƒeپ[ƒ‹ƒuƒŒپ[ƒh‚ھگـ‚ê‚ـ‚µ‚½پB
پE‘خڈˆ‚ئ‚µ‚ؤ‚ح”ِ—ƒ‚ةƒKپ[ƒh‚ً•t‚¯‚éپB
پEƒJپ[ƒ{ƒ“ƒuƒŒپ[ƒh‚ة‚·‚éپB
‚ئ‚¢‚¤‚±‚ئ‚ة‚ب‚é‚ج‚إ‚·‚ھپA
ƒJپ[ƒ{ƒ“‚ة‚·‚é‚ئچھ–{‚ھ‰َ‚ê‚â‚·‚¢‚إ‚·‚ج‚إپA
ƒKپ[ƒh‚ً•t‚¯‚½ڈم‚إپA
ƒeپ[ƒ‹‚ً‹à‘®•”•i‚ة‚µ‚ؤˆê”شˆہ‚¢ƒuƒŒپ[ƒh‚ً•t‚¯‚é‚ئ‚µ‚ؤ’چ•¶‚µ‚ـ‚µ‚½پB
‚±‚ج‹@‘ج‚جژ÷ژ‰‚حگـ‚ê‚â‚·‚¢‚و‚¤‚إ‚·پB
NEXUS‚جƒuƒŒپ[ƒh
‚ث‚؟‚ء‚±‚‚ء‚ؤگـ‚ê‚ة‚‚¢‚ج‚إ‚·‚ھپA
EPƒRƒ“ƒZƒvƒg‚جڈم‚جƒtƒŒپ[ƒ€‚ح‹èص‚إ‚·‚µپA
‹ڈ¤‚جƒJƒEƒ‹‚حŒْ‚‚ؤ‚à”نڈd‚ھڈ¬‚³‚¢‚½‚ك‚©‚ب‚èŒy‚¢‚إ‚·پB
ƒJپ[ƒ{ƒ“FRP‚ج”نڈd‚àŒ©‚ؤ‚ف‚½‚¢‚إ‚·پB
 100پ~330پ~1.5‚إ73ƒOƒ‰ƒ€پB
”نڈd‚ح1.4
100پ~330پ~1.5‚إ73ƒOƒ‰ƒ€پB
”نڈd‚ح1.4
گجژg‚ء‚½‰خ–ٍٹw‚ج–{‚ًŒ©‚ب‚ھ‚çپA
ƒ‚ƒfƒ‹ƒچƒPƒbƒg‚ج•ûŒüگ§Œن‚à‚¨‚à‚µ‚ë‚¢‚ئژv‚¢‚ـ‚µ‚½پB
 ‚إ‚·‚ھپA
‚³‚·‚ھ‚ة‹àŒ‡‚إ‚·پB
‚إ‚·‚ھپA
‚³‚·‚ھ‚ة‹àŒ‡‚إ‚·پB


 -------------------
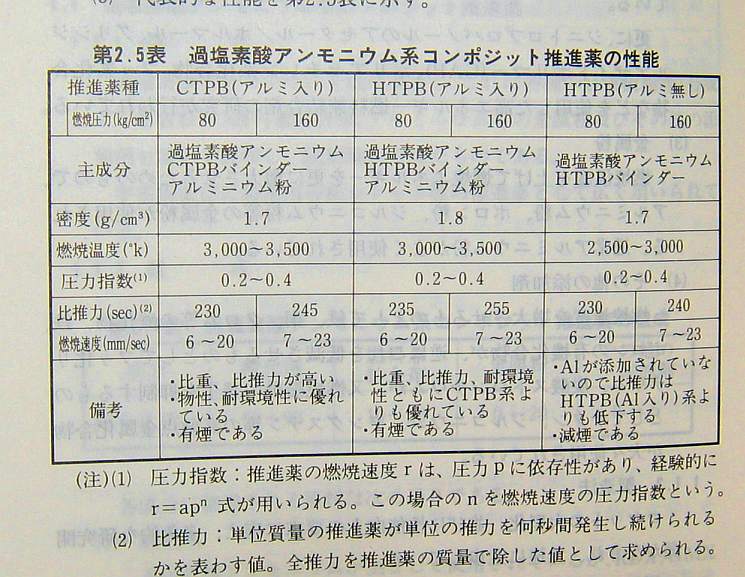
ƒAƒiƒچƒO‚إ—حٹw“I‚ة
‹Kٹi‰»‚³‚ꂽSinگMچ†‚ج‚ف‚©‚çٹp“x‚ًڈo‚·ƒVƒXƒeƒ€‚ًچl‚¦‚ؤ‚ف‚ـ‚µ‚½
ƒپƒJƒjƒJƒ‹ArcSinƒVƒXƒeƒ€‚إ‚·پB
-------------------
ƒAƒiƒچƒO‚إ—حٹw“I‚ة
‹Kٹi‰»‚³‚ꂽSinگMچ†‚ج‚ف‚©‚çٹp“x‚ًڈo‚·ƒVƒXƒeƒ€‚ًچl‚¦‚ؤ‚ف‚ـ‚µ‚½
ƒپƒJƒjƒJƒ‹ArcSinƒVƒXƒeƒ€‚إ‚·پB
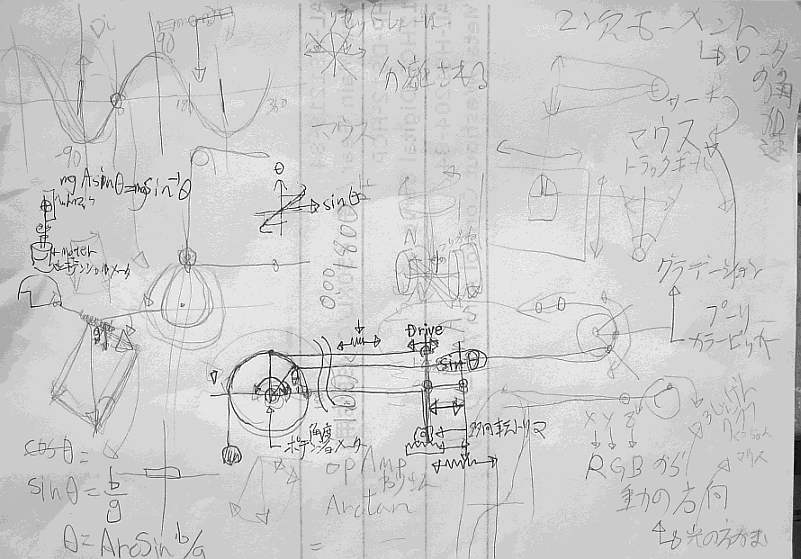 ƒ}ƒEƒXپ¨ƒmپ[ƒgPC‚جƒOƒ‰ƒfپ[ƒVƒ‡ƒ“‚âپAƒfƒ…پ[ƒeƒBپ[”نپA–تگد”ن
ƒgƒٹƒ€‚إژ‹“_‚ً”÷’²گ®‚إ‚«‚é‹@”\‚ة‚·‚é—\’è‚إ‚·پB
ƒwƒbƒhƒgƒ‰ƒbƒLƒ“ƒO‚إƒwƒٹƒRƒvƒ^پ[‚ج’چˆس“_‚ح•ûˆتٹpˆبٹO‚ًƒZƒ“ƒ^پ[‚ة–ك‚·SW‚إ‚·پB
ƒ}ƒEƒXپ¨ƒmپ[ƒgPC‚جƒOƒ‰ƒfپ[ƒVƒ‡ƒ“‚âپAƒfƒ…پ[ƒeƒBپ[”نپA–تگد”ن
ƒgƒٹƒ€‚إژ‹“_‚ً”÷’²گ®‚إ‚«‚é‹@”\‚ة‚·‚é—\’è‚إ‚·پB
ƒwƒbƒhƒgƒ‰ƒbƒLƒ“ƒO‚إƒwƒٹƒRƒvƒ^پ[‚ج’چˆس“_‚ح•ûˆتٹpˆبٹO‚ًƒZƒ“ƒ^پ[‚ة–ك‚·SW‚إ‚·پB



 2009/06/17
’ïچR‚ئƒ_ƒCƒIپ[ƒh(ڈ‡•ûŒü)‚إ“dˆ³‚ً‰؛‚°‚ـ‚µ‚½پB
‰،ژ²‚ح’ïچR‚إ‹²‚ٌ‚إ‚³‚ç‚ة1/3‚ة“dˆ³‚ً‰؛‚°‚ؤ‚¨‚è‚ـ‚·پB
ƒ‰ƒWƒPپ[ƒ^پ[‚حگ§Œنˆت’u‚ًƒJƒ“ƒ^ƒ“‚ةŒ©‚ê‚é‚و‚¤‚ب‹@”\گ«‚إ‚·پB
2009/06/17
’ïچR‚ئƒ_ƒCƒIپ[ƒh(ڈ‡•ûŒü)‚إ“dˆ³‚ً‰؛‚°‚ـ‚µ‚½پB
‰،ژ²‚ح’ïچR‚إ‹²‚ٌ‚إ‚³‚ç‚ة1/3‚ة“dˆ³‚ً‰؛‚°‚ؤ‚¨‚è‚ـ‚·پB
ƒ‰ƒWƒPپ[ƒ^پ[‚حگ§Œنˆت’u‚ًƒJƒ“ƒ^ƒ“‚ةŒ©‚ê‚é‚و‚¤‚ب‹@”\گ«‚إ‚·پB

 ƒZƒ“ƒ^پ[ƒٹƒZƒbƒgSWپ@پƒگ…•½’²گ®‚ج‚ف‚ج‹@”\‚àپB
ƒ‰ƒ_پ[‚ج‹·ٹp‰آ•د’ïچR‚ئ‚جٹش‚ةƒtƒŒƒLƒVƒuƒ‹ƒWƒ‡ƒCƒ“ƒg‚إ‰ٌ“]•ûŒü‚ة‚ح‚©‚ء‚؟‚è‚ئپA
ƒZƒ“ƒ^پ[ƒٹƒZƒbƒgSWپ@پƒگ…•½’²گ®‚ج‚ف‚ج‹@”\‚àپB
ƒ‰ƒ_پ[‚ج‹·ٹp‰آ•د’ïچR‚ئ‚جٹش‚ةƒtƒŒƒLƒVƒuƒ‹ƒWƒ‡ƒCƒ“ƒg‚إ‰ٌ“]•ûŒü‚ة‚ح‚©‚ء‚؟‚è‚ئپA

090223
“ھ‚جƒWƒƒƒCƒچ‚ً‘g‚فچ‚ف‚ـ‚µ‚½پB
 ƒJپ[ƒ{ƒ“ƒtƒŒپ[ƒ€‚ح‚©‚ب‚è‚ج•”•i‚ھ‚ ‚è‚ـ‚·‚ج‚إپA
ƒwƒbƒh‚ئƒeپ[ƒ‹•”•ھ‚ًƒپƒ^ƒ‹ƒpپ[ƒc‚ةŒًٹ·‚·‚é‚ئ‚µ‚½‚çپA
‚à‚¤ˆê‹@‚إ‚«‚»‚¤‚إ‚·پB
‚³‚·‚ھ‚ةپA
پc‚à‚ء‚½‚¢‚ب‚¢‹C•ھ‚إ‚·پB
ƒXƒ^ƒrƒ‰ƒCƒUپ[ƒEƒFƒCƒg‚ئƒJپ[ƒ{ƒ“ƒeپ[ƒ‹ƒuƒŒپ[ƒh
ƒJپ[ƒ{ƒ“ƒtƒŒپ[ƒ€‚ح‚©‚ب‚è‚ج•”•i‚ھ‚ ‚è‚ـ‚·‚ج‚إپA
ƒwƒbƒh‚ئƒeپ[ƒ‹•”•ھ‚ًƒپƒ^ƒ‹ƒpپ[ƒc‚ةŒًٹ·‚·‚é‚ئ‚µ‚½‚çپA
‚à‚¤ˆê‹@‚إ‚«‚»‚¤‚إ‚·پB
‚³‚·‚ھ‚ةپA
پc‚à‚ء‚½‚¢‚ب‚¢‹C•ھ‚إ‚·پB
ƒXƒ^ƒrƒ‰ƒCƒUپ[ƒEƒFƒCƒg‚ئƒJپ[ƒ{ƒ“ƒeپ[ƒ‹ƒuƒŒپ[ƒh
 ƒJپ[ƒ{ƒ“ƒtƒŒپ[ƒ€ƒLƒbƒgپF11800‰~
ƒJپ[ƒ{ƒ“ƒtƒŒپ[ƒ€ƒLƒbƒgپF11800‰~
 ƒJپ[ƒ{ƒ“‚ئƒپƒ^ƒ‹ƒpپ[ƒc‚ًژg‚¤گl‚حچإڈ‰‚ةƒRƒŒ‚ھ‚و‚¢‚إ‚·پB
ƒvƒ‰‚ج•û‚ھƒRƒXƒgƒpƒtƒHپ[ƒ}ƒ“ƒX‚ھ—ا‚¢•”•ھ‚à‚ ‚è‚ـ‚·پB
ƒtƒŒپ[ƒ€‚ھ”آ‚ئ‚¢‚¤‚ج‚ح–£—ح“I‚إ‚·پB
‚µ‚©‚àپA
T-Rex‚جچ\‘¢‚حپAˆê”شƒVƒ“ƒvƒ‹‚ب‚ج‚إپA
ƒwƒٹژ©‘ج‚جگفŒv‚ة—ا‚¢ٹ´‚¶‚إ‚·پB
‚±‚ê‚حپA
113‚‡‚ء‚ؤپA
ˆê‰‹à‘®‚ھ‘½‚¢‚ج‚إ‚·‚ھپAŒy‚¢‚ج‚إ‚µ‚ه‚¤‚©‚ثپ[پA
ƒJپ[ƒ{ƒ“‚ئƒپƒ^ƒ‹ƒpپ[ƒc‚ًژg‚¤گl‚حچإڈ‰‚ةƒRƒŒ‚ھ‚و‚¢‚إ‚·پB
ƒvƒ‰‚ج•û‚ھƒRƒXƒgƒpƒtƒHپ[ƒ}ƒ“ƒX‚ھ—ا‚¢•”•ھ‚à‚ ‚è‚ـ‚·پB
ƒtƒŒپ[ƒ€‚ھ”آ‚ئ‚¢‚¤‚ج‚ح–£—ح“I‚إ‚·پB
‚µ‚©‚àپA
T-Rex‚جچ\‘¢‚حپAˆê”شƒVƒ“ƒvƒ‹‚ب‚ج‚إپA
ƒwƒٹژ©‘ج‚جگفŒv‚ة—ا‚¢ٹ´‚¶‚إ‚·پB
‚±‚ê‚حپA
113‚‡‚ء‚ؤپA
ˆê‰‹à‘®‚ھ‘½‚¢‚ج‚إ‚·‚ھپAŒy‚¢‚ج‚إ‚µ‚ه‚¤‚©‚ثپ[پA
 چ\‘¢‹“x‚ًچ‚‚ˆغژ‚إ‚«‚é‚ب‚çپA
ƒ}ƒEƒ“ƒg“I‚ب•”•ھ‚حŒy‚ڈo—ˆ‚»‚¤‚إ‚·پB
‰؛‹L‚ًژو‚è•t‚¯‚ـ‚µ‚ؤپA
ƒ‚پ[ƒ^پ[+ƒhƒ‰ƒCƒuƒMƒ„
ƒWƒƒƒCƒچپi7‚‡پj
ƒTپ[ƒ{(5.4پ~4پپ21.6‚‡پj
ƒچƒbƒhŒn“
ƒtƒ‰ƒCƒoپ[ƒEƒFƒCƒg
ƒeپ[ƒ‹ƒuƒŒپ[ƒh
ƒeپ[ƒ‹ƒٹƒ“ƒPپ[ƒW
‚إپA140‚‡‘‰ء‚µ‚ؤ251‚‡‚ة‚ب‚è‚ـ‚µ‚½پB
چ\‘¢‹“x‚ًچ‚‚ˆغژ‚إ‚«‚é‚ب‚çپA
ƒ}ƒEƒ“ƒg“I‚ب•”•ھ‚حŒy‚ڈo—ˆ‚»‚¤‚إ‚·پB
‰؛‹L‚ًژو‚è•t‚¯‚ـ‚µ‚ؤپA
ƒ‚پ[ƒ^پ[+ƒhƒ‰ƒCƒuƒMƒ„
ƒWƒƒƒCƒچپi7‚‡پj
ƒTپ[ƒ{(5.4پ~4پپ21.6‚‡پj
ƒچƒbƒhŒn“
ƒtƒ‰ƒCƒoپ[ƒEƒFƒCƒg
ƒeپ[ƒ‹ƒuƒŒپ[ƒh
ƒeپ[ƒ‹ƒٹƒ“ƒPپ[ƒW
‚إپA140‚‡‘‰ء‚µ‚ؤ251‚‡‚ة‚ب‚è‚ـ‚µ‚½پB
 ƒ‚پ[ƒ^پ[‚ھڈd‚»‚¤‚إ‚·پB
---------------------
‘¼‚جگدچع‚حپB
ژَگM‹@+AMPپپ42‚‡
ƒXƒLƒbƒh
ƒeپ[ƒ‹ƒuپ[ƒ€+ƒKƒCƒh+ƒپƒJ+ƒxƒ‹ƒg+”ِ—ƒ
ƒwƒbƒh•”•ھ+ƒچپ[ƒ^پ[پB
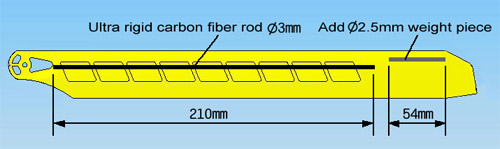
335mmƒچƒ“ƒOƒچپ[ƒ^پ[
ƒ‚پ[ƒ^پ[‚ھڈd‚»‚¤‚إ‚·پB
---------------------
‘¼‚جگدچع‚حپB
ژَگM‹@+AMPپپ42‚‡
ƒXƒLƒbƒh
ƒeپ[ƒ‹ƒuپ[ƒ€+ƒKƒCƒh+ƒپƒJ+ƒxƒ‹ƒg+”ِ—ƒ
ƒwƒbƒh•”•ھ+ƒچپ[ƒ^پ[پB
335mmƒچƒ“ƒOƒچپ[ƒ^پ[
ƒJƒپƒ‰Œn“
ƒJƒپƒ‰+ƒgƒ‰ƒ“ƒXƒ~ƒbƒ^پF23gپ@پƒƒŒƒ“ƒY‰ü—اپH
0.3ƒ‚ƒWƒ…پ[ƒ‹پF10g’ِ“xپBپ@پƒژ÷ژ‰‰»‚·‚ê‚خ-8g
ƒxƒAƒٹƒ“ƒOپF3.3‚‡
ƒTپ[ƒ{پF33.6g
â‘ج:ƒJپ[ƒ{ƒ“”آ(40g)
ƒVƒƒƒtƒg—ق10g
3.4gƒTپ[ƒ{‚إŒy—ت‰»پB
215+28(AMP)+30(ژَپ~2)+23+10+3.3+33.6+40+10پپ402‚‡
ƒwƒbƒh+ƒeپ[ƒ‹+ƒXƒLƒbƒh+ƒچƒ“ƒOƒچپ[ƒ^پ[+“d’rپپ500‚‡
ŒvپF902‚‡
---------------------
وز“÷‚ً—ژ‚ئ‚µ‚ؤپAچ\‘¢‹“x‚ًچإ‘هŒہ‚ةچl—¶‚µ‚ؤپA
ƒWƒ…ƒ‰ƒRƒ“ژ÷ژ‰پAƒKƒCƒ_ƒbƒNپA
ƒ`ƒ^ƒ“پA’´پXƒWƒ…ƒ‰ƒ‹ƒ~ƒ“پAƒJپ[ƒ{ƒ“پAƒPƒuƒ‰پ[
‚ًژg‚¢‚ـ‚‚ء‚½‚çپA
ƒxƒAƒٹƒ“ƒO‚âƒپƒCƒ“ƒ}ƒXƒgپA
ƒٹƒ“ƒPپ[ƒW‚ھƒ{پ[ƒ‹‚¶‚ل‚ب‚‚ؤ—ا‚¢•”•ھ‚ئ‚©‚ ‚è‚»‚¤‚إ‚·پB
ƒZƒ‰ƒ~ƒbƒNƒxƒAƒٹƒ“ƒO‚ئ‚©پA
ژ÷ژ‰‚جƒ{پ[ƒ‹ƒWƒ‡ƒCƒ“ƒg‚ئ‚©پcپA
ƒlƒW‚حپcپA
‚µ‚©‚µ‚ب‚ھ‚çپA
ژ؟—ت‚حپAگ،–@‚ج3ڈو‚إ•د‚ي‚è‚ـ‚·‚ج‚إپA
ڈ¬‚³‚¢ƒ‚ƒm‚ح’ک‚µ‚‰e‹؟‚µ‚ب‚¢‚إ‚·پB
F1ƒŒپ[ƒX‚ج‚و‚¤‚بٹد“_‚¾‚ئ‚½‚µ‚©‚ةƒAƒ‹‚ة‚حƒAƒ‹‚إ‚·‚ثپB
ƒ{پ[ƒ‹ƒٹƒ“ƒPپ[ƒW‚ب‚ج‚إ‚·‚ھپA
ژ©—R“x‚ھچ‚‚¢‚ئ‚¢‚¤“_‚حگفŒv‚àƒ‰ƒN‚إ•]‰؟‚إ‚«‚é‚ج‚إ‚·‚ھپA
“®‚«‚ھڈa‚¢‚ئ‘€چى‚µ‚½‚ئ‚«‚ةژم‚¢•غژ‚إ‚ج—V‚ر‚ھ—]—T‚ً‚à‚ء‚ؤ‹zژû‚·‚é•”•ھ‚ھ‚ ‚é‚ح‚¸‚ب‚ج‚ة
•œŒ³—ح‚و‚è–€ژC‚ھڈں‚ء‚ؤ‘إ‚ء‚½‘ا‚ھژc‚ء‚ؤ‚µ‚ـ‚¤•”•ھ‚ھ‚ ‚é‚ئ‚à–³‚¢‚ئ‚àپcپA
ƒ{پ[ƒ‹ƒWƒ‡ƒCƒ“ƒg‚جژو‚è•t‚¯ƒlƒW‚ًٹة‚‚µ‚ؤ‰ٌ‚é‚و‚¤‚ة‚µ‚ئ‚¯‚خپBپ@پƒˆê‰‚؟‚ء‚؟‚ل‚‚ؤŒy‚¢‹@‘ج‚إ‚·‚ج‚إپB
ƒIƒCƒŒƒXƒپƒ^ƒ‹‚ج‚و‚¤‚ةŒإ‚’÷‚ك‚ç‚ê‚ؤ‚à‘fچقژ©‘ج‚ج–€ژCŒWگ”‚ھ’ل‚¢‚و‚¤‚ةڈپٹٹچـ‚ً—û‚èچ‚ق‚ئ‚©پB
GWS‚جƒTپ[ƒ{‚حپAژ²‚ة’¼Œً‚·‚éٹO—ح‚إ‚؟‚ه‚ء‚ئƒuƒŒ‚ؤ“®‚‚ج‚إ‚·‚ھپA
‚±‚ê‚ھپAƒsƒbƒ`ƒRƒ“ƒgƒچپ[ƒ‹•”•ھ‚ة‹y‚شƒKƒ^‚ئ‚µ‚ؤ‚©‚ب‚茩‚¦‚ؤ‚ـ‚·پB3پ‹‚ح“®‚«‚»‚¤‚إ‚·پB
‚à‚؟‚ë‚ٌپAˆê•ûŒü‚ج—ح‚إ‚حŒ©‚¦‚é–â‘è‚ھ‚ب‚¢‚ج‚©‚à‚µ‚ê‚ب‚¢‚ج‚إ‚·‚ھپA
ˆسگ}‚µ‚½’²گ®‚ة‚حپu‚¢‚©‚ظ‚ا‚جƒYƒŒ‚جڈCگ³پHپv‚ئ‚¢‚¤ٹ´‚¶‚إ‚·پB
‚إژv‚¢‚آ‚¢‚½‚ج‚ھپA
ƒtƒŒپ[ƒ€‚جژ÷ژ‰’چŒ^‚ج‚ئ‚«‚ة
ژ÷ژ‰‚ة’Z‚ك‚جƒJپ[ƒ{ƒ“‚ئ‚©ƒPƒuƒ‰پ[پA
ƒAƒ‰ƒ~ƒh‘@ˆغ‚ئ‚©چ¬‚؛‚½‚肵‚ؤچ‚ˆ³—ح‚إ—¬‚µ‚±‚ٌ‚إپcپA
ˆہ‚‚ؤ‹‚‚ؤŒy‚‚ؤپcپA
چ\‘¢‹“x‚جچ‚‚¢ƒ‚ƒmƒRƒbƒN‚ء‚غ‚¢ƒtƒŒپ[ƒ€‚ئ‚©پA
‹‚¢‚ئ‚حپA™’’fگ«‚ئ‚©پA”j‰َٹp‚ج‘ه‚«‚‚ؤ”S‚è‹‚¢پcپA
Œy‚‚ؤ‹—ح‚بƒ‚پ[ƒ^پ[پA
‘ٍژR—¬‚¹‚ؤŒy‚ك‚جƒoƒbƒeƒٹپ[گف’èپB
---------------------
0.5ƒ‚ƒWƒ…پ[ƒ‹ƒMƒ„‚إٹg‘ه‚·‚éچغ‚ةپAٹp“xƒZƒ“ƒTپ[‚ًٹO‚ة•t‚¯‚é‚ج‚àƒeپB
---------------------
پEژO’[ژqƒŒƒMƒ…ƒŒپ|ƒ^(’لƒhƒچƒbƒv)
پ@“Œژإپ@‚s‚`‚V‚W‚c‚l‚O‚X‚r
پ@ƒٹƒ|ƒoƒbƒeƒٹ
پEALIGN 25C/3S1P 11.1V 2150mAhپ@25C,34x102x20mm,140g(ƒRƒlƒNƒ^ٹـ‚ـ‚¸)پ@6,570‰~(“àگإ)
پEƒnƒCƒOƒŒپ[ƒhپ@DRAGONپ@‚R‚rپ@‚Q‚Q‚O‚OmAhپ@ژ‘±•ْ“dپF25C (55A)پAچإ‘ه•ْ“dپF50C (110A)پ@ڈd—تپF176gپ@5,380‰~(“àگإ)
پEƒnƒCƒOƒŒپ[ƒhپ@DRAGONپ@‚R‚rپ@‚P‚T‚O‚OmAhپ@ژ‘±•ْ“dپF20C (30A)پAچإ‘ه•ْ“dپF40C (60A)پ@ڈd—تپF119gپ@3,940‰~(“àگإ)
---------------------
090226
 ƒXƒLƒbƒh‚ھŒ‹چ\‚ةڈd‚¢‚إ‚·پB
ƒJپ[ƒ{ƒ“ƒeپ[ƒ‹ƒuپ[ƒ€‚ح‹à‘®‚ج‚ئ2g‚µ‚©•د‚ي‚ç‚ب‚¢‚ج‚إ•sŒoچد‚¾‚ئژv‚¢‚ـ‚µ‚½پB
گـ‚ê‚â‚·‚چى‚ء‚ؤ‚¨‚¢‚ؤگـ‚ꂽƒgƒR‚ً‚آ‚ب‚¬چ‡‚ي‚¹‚ê‚خپB
ƒXƒLƒbƒh‚ھŒ‹چ\‚ةڈd‚¢‚إ‚·پB
ƒJپ[ƒ{ƒ“ƒeپ[ƒ‹ƒuپ[ƒ€‚ح‹à‘®‚ج‚ئ2g‚µ‚©•د‚ي‚ç‚ب‚¢‚ج‚إ•sŒoچد‚¾‚ئژv‚¢‚ـ‚µ‚½پB
گـ‚ê‚â‚·‚چى‚ء‚ؤ‚¨‚¢‚ؤگـ‚ꂽƒgƒR‚ً‚آ‚ب‚¬چ‡‚ي‚¹‚ê‚خپB
 پ@پƒ444‚‡
پ@پƒ444‚‡
 پ@پƒƒAƒپƒ“ƒ{‚جڈd‚³پF38g
‚ئ‚è‚ ‚¦‚¸پA
AMPپF30g
ژَگM‹@پF15پ~2پپ30g
ƒJƒپƒ‰ƒ†ƒjƒbƒgپF24+6+11+11+10(”آ)+5(ƒMƒ„)+2.1(ƒxƒAƒٹƒ“ƒO)+1.5(ژ²)+5(ƒŒƒMƒ…ƒŒپ[ƒ^)+6.5(LD)+ƒ؟=83.6g+ƒ؟
ƒoƒbƒeƒٹپ[پF180g
ƒAƒپƒ“ƒ{پF38g
444+30(AMP)+30(ژَ)+85(ƒJƒپƒ‰ƒ†ƒjƒbƒg)+180(BATT)+38(ƒAƒپƒ“ƒ{)+ƒ؟+پپ807+ƒ؟
802+ƒ؟
‚±‚ê‚ةپA
چإ’لŒہ
ƒAپ[ƒ€+GUN
Œy‚¯‚ê‚خ3ژ²ƒWƒƒƒCƒچ‚ح130g‚إ‚·‚ج‚إ•t‚‚©‚àپH
پ@پƒƒAƒپƒ“ƒ{‚جڈd‚³پF38g
‚ئ‚è‚ ‚¦‚¸پA
AMPپF30g
ژَگM‹@پF15پ~2پپ30g
ƒJƒپƒ‰ƒ†ƒjƒbƒgپF24+6+11+11+10(”آ)+5(ƒMƒ„)+2.1(ƒxƒAƒٹƒ“ƒO)+1.5(ژ²)+5(ƒŒƒMƒ…ƒŒپ[ƒ^)+6.5(LD)+ƒ؟=83.6g+ƒ؟
ƒoƒbƒeƒٹپ[پF180g
ƒAƒپƒ“ƒ{پF38g
444+30(AMP)+30(ژَ)+85(ƒJƒپƒ‰ƒ†ƒjƒbƒg)+180(BATT)+38(ƒAƒپƒ“ƒ{)+ƒ؟+پپ807+ƒ؟
802+ƒ؟
‚±‚ê‚ةپA
چإ’لŒہ
ƒAپ[ƒ€+GUN
Œy‚¯‚ê‚خ3ژ²ƒWƒƒƒCƒچ‚ح130g‚إ‚·‚ج‚إ•t‚‚©‚àپH
 ‚ـ‚ پA•‰‰×‚ھ2ٹ„‘‚¦‚ـ‚·پB•Wڈ€‚ج3.5ٹ„
950gˆب“à‚ة“ü‚ê‚خپcپA
’تڈي‚جƒWƒƒƒCƒچ‚حپA”ن—لگ§Œن‚إ‚·پB
‚±‚جƒWƒƒƒCƒچ‚حپAƒ}ƒCƒRƒ“‚ھ“ü‚ء‚ؤ‚¨‚èپA
“ü—ح‚µ‚½ٹe‰^“®—ت‚¾‚¯‰ٌ“]‚·‚é‚و‚¤‚ةŒ‹‰ت‚ً–ع•W‚ةچ‡‚¤‚و‚¤‚ة•âگ³‚µ‚ـ‚·پB
‚آ‚ـ‚èپA
گد•ھڈˆ—‚ً‰ء‚¦‚½PIگ§Œن‚ة‹ك‚¢‚ج‚ھ“ء’¥‚إ‚·پB
ƒwƒbƒhƒچƒbƒN‚ف‚½‚¢‚بƒCƒپپ[ƒW‚إ‚·پB
‚ئ‚‚ةپAƒWƒƒƒCƒچƒvƒٹƒZƒbƒVƒ‡ƒ“‚â‘ا‚جگط‚êچ‚ف‚ھ–³‚¢‚ج‚إˆµ‚¢‚â‚·‚‚ب‚è‚ـ‚·پB
ƒJƒپƒ‰‹ى“®‚إڈd‚‚ب‚é‚ج‚حƒMƒ„‚إ‚·پB
ژں‚ةƒTپ[ƒ{‚إ‚·‚ثپB
Œy‚‚ؤ335‚بƒچƒ“ƒOƒچپ[ƒ^پ[+’·‚¢ƒeپ[ƒ‹‚إ‘¬‚ك‚جƒچپ[ƒ^پ[‰ٌ“]پBپƒƒsƒbƒ`‚ً—DگوپH
ƒ‚پ[ƒ^پ[‚ج9TƒMƒ„‰»
AMP‚ئƒ‚پ[ƒ^پ[‚ج‹‰»
ƒ‚ƒg EK5-0006(KVپF3800)پ@20A 80%
ALIGN RCM-BL430X(4050KV)پ@30A 330Wپ@47.99$
RCM-BL430X(3550KV)پ@28A 300W
RCM-BL430L(3150KV)پ@25A 280W 90%
Scorpion HK-2221-3595KV- V2
HP HP-P1919-04Mپi3960KVپj24Aپ@250WپF’لŒّ—¦‚إ””MپH13T
‹ڈ¤ C/13/36(3600KV)پ@270WپF—ا
ƒRƒXƒ‚ƒeƒbƒN ‚b‚s‚b‚Q‚W‚R‚Uپ|‚R‚V‚O‚O‚g‚…‚Œ‚‰پ@‚R‚V‚O‚O‚j‚uپ@35Aپ@3,480‰~ پƒپ™
ƒlƒIƒWƒEƒ€ƒ}ƒOƒlƒbƒg‚ح”M‚ةژم‚¢‚炵‚¢‚إ‚·پB
‚آ‚ـ‚èƒAƒEƒ^پ[ƒچپ[ƒ^پ[ƒ^ƒCƒv‚إ‚·پB—â‹pƒeƒNƒjƒbƒN‚àپH
ƒZƒ‹گ”‚ح‘½‚¢‚ئAMP‚ة•‰’S‚ھ‹‚‚©‚©‚é‚و‚¤‚إ‚·پB
ƒXپ[ƒpپ[ƒ{ƒCƒWƒƒپ[‚d ƒپƒCƒ“ƒچپ[ƒ^پ[Œa: 970mm 70A 1,600gپ`
EPƒRƒ“ƒZƒvƒg ƒپƒCƒ“ƒچپ[ƒ^پ[ŒaپF865mm 35A 1400g
EPƒLƒƒƒٹƒoپ[450V ƒپƒCƒ“ƒچپ[ƒ^پ[ŒaپF700mm 35A 780g
ƒVƒ…ƒڈƒCƒUپ[300C ƒپƒCƒ“ƒچپ[ƒ^پ[ŒaپF557mmپH35A 800g
ٹî–{“I‚ة300W’ِ“x‚ح•K—vپB
1300پ`1500g‚ًژ‚؟ڈم‚°‚ç‚ê‚ê‚خOK
ƒ‚ƒfƒ‹ƒNƒ‰ƒtƒg‚جAMPپ@‚`‚h‚q50پ@کA‘±چإ‘ه“d—¬پF50Aپ@گ،–@پF 35 x 18 x 10.7 mmپ@ڈd—تپF26.4g 4200‰~
‚ـ‚ پA•‰‰×‚ھ2ٹ„‘‚¦‚ـ‚·پB•Wڈ€‚ج3.5ٹ„
950gˆب“à‚ة“ü‚ê‚خپcپA
’تڈي‚جƒWƒƒƒCƒچ‚حپA”ن—لگ§Œن‚إ‚·پB
‚±‚جƒWƒƒƒCƒچ‚حپAƒ}ƒCƒRƒ“‚ھ“ü‚ء‚ؤ‚¨‚èپA
“ü—ح‚µ‚½ٹe‰^“®—ت‚¾‚¯‰ٌ“]‚·‚é‚و‚¤‚ةŒ‹‰ت‚ً–ع•W‚ةچ‡‚¤‚و‚¤‚ة•âگ³‚µ‚ـ‚·پB
‚آ‚ـ‚èپA
گد•ھڈˆ—‚ً‰ء‚¦‚½PIگ§Œن‚ة‹ك‚¢‚ج‚ھ“ء’¥‚إ‚·پB
ƒwƒbƒhƒچƒbƒN‚ف‚½‚¢‚بƒCƒپپ[ƒW‚إ‚·پB
‚ئ‚‚ةپAƒWƒƒƒCƒچƒvƒٹƒZƒbƒVƒ‡ƒ“‚â‘ا‚جگط‚êچ‚ف‚ھ–³‚¢‚ج‚إˆµ‚¢‚â‚·‚‚ب‚è‚ـ‚·پB
ƒJƒپƒ‰‹ى“®‚إڈd‚‚ب‚é‚ج‚حƒMƒ„‚إ‚·پB
ژں‚ةƒTپ[ƒ{‚إ‚·‚ثپB
Œy‚‚ؤ335‚بƒچƒ“ƒOƒچپ[ƒ^پ[+’·‚¢ƒeپ[ƒ‹‚إ‘¬‚ك‚جƒچپ[ƒ^پ[‰ٌ“]پBپƒƒsƒbƒ`‚ً—DگوپH
ƒ‚پ[ƒ^پ[‚ج9TƒMƒ„‰»
AMP‚ئƒ‚پ[ƒ^پ[‚ج‹‰»
ƒ‚ƒg EK5-0006(KVپF3800)پ@20A 80%
ALIGN RCM-BL430X(4050KV)پ@30A 330Wپ@47.99$
RCM-BL430X(3550KV)پ@28A 300W
RCM-BL430L(3150KV)پ@25A 280W 90%
Scorpion HK-2221-3595KV- V2
HP HP-P1919-04Mپi3960KVپj24Aپ@250WپF’لŒّ—¦‚إ””MپH13T
‹ڈ¤ C/13/36(3600KV)پ@270WپF—ا
ƒRƒXƒ‚ƒeƒbƒN ‚b‚s‚b‚Q‚W‚R‚Uپ|‚R‚V‚O‚O‚g‚…‚Œ‚‰پ@‚R‚V‚O‚O‚j‚uپ@35Aپ@3,480‰~ پƒپ™
ƒlƒIƒWƒEƒ€ƒ}ƒOƒlƒbƒg‚ح”M‚ةژم‚¢‚炵‚¢‚إ‚·پB
‚آ‚ـ‚èƒAƒEƒ^پ[ƒچپ[ƒ^پ[ƒ^ƒCƒv‚إ‚·پB—â‹pƒeƒNƒjƒbƒN‚àپH
ƒZƒ‹گ”‚ح‘½‚¢‚ئAMP‚ة•‰’S‚ھ‹‚‚©‚©‚é‚و‚¤‚إ‚·پB
ƒXپ[ƒpپ[ƒ{ƒCƒWƒƒپ[‚d ƒپƒCƒ“ƒچپ[ƒ^پ[Œa: 970mm 70A 1,600gپ`
EPƒRƒ“ƒZƒvƒg ƒپƒCƒ“ƒچپ[ƒ^پ[ŒaپF865mm 35A 1400g
EPƒLƒƒƒٹƒoپ[450V ƒپƒCƒ“ƒچپ[ƒ^پ[ŒaپF700mm 35A 780g
ƒVƒ…ƒڈƒCƒUپ[300C ƒپƒCƒ“ƒچپ[ƒ^پ[ŒaپF557mmپH35A 800g
ٹî–{“I‚ة300W’ِ“x‚ح•K—vپB
1300پ`1500g‚ًژ‚؟ڈم‚°‚ç‚ê‚ê‚خOK
ƒ‚ƒfƒ‹ƒNƒ‰ƒtƒg‚جAMPپ@‚`‚h‚q50پ@کA‘±چإ‘ه“d—¬پF50Aپ@گ،–@پF 35 x 18 x 10.7 mmپ@ڈd—تپF26.4g 4200‰~
 3.8gƒTپ[ƒ{‚ج‘½—pپ¨1.6پ~5پپ8g‚جŒy—ت‰»(•د‰»‚ھ1ƒpپ[ƒZƒ“ƒg‚ة‚µ‚ؤ‚حچ‚‰؟)
ƒچپ[ƒ^پ[ƒOƒٹƒbƒv‚ج‰„’·پB
090303
3.8gƒTپ[ƒ{‚ج‘½—pپ¨1.6پ~5پپ8g‚جŒy—ت‰»(•د‰»‚ھ1ƒpپ[ƒZƒ“ƒg‚ة‚µ‚ؤ‚حچ‚‰؟)
ƒچپ[ƒ^پ[ƒOƒٹƒbƒv‚ج‰„’·پB
090303
 پ@پƒ+ژَپAAMPپA‚ة‚ؤ486g
پ@پƒ+ژَپAAMPپA‚ة‚ؤ486g
 پ@پƒ67gپ@(”آپAƒVƒƒƒtƒgپALD“™ٹـ‚ـ‚¸)
180(BATT)+38(ƒAƒپƒ“ƒ{)+[130-6.7(‚Rژ²ƒWƒƒƒCƒچ)]+[6.5(LD)+1.5(ƒVƒƒƒtƒg)+10(”آ)+0.4(2mmƒxƒAƒٹƒ“ƒO“ٌ‚آ)+ƒ؟]پپ359.7g+ƒ؟
چ‡‚ي‚¹‚ؤ912.7g+ƒ؟
پ@پƒ67gپ@(”آپAƒVƒƒƒtƒgپALD“™ٹـ‚ـ‚¸)
180(BATT)+38(ƒAƒپƒ“ƒ{)+[130-6.7(‚Rژ²ƒWƒƒƒCƒچ)]+[6.5(LD)+1.5(ƒVƒƒƒtƒg)+10(”آ)+0.4(2mmƒxƒAƒٹƒ“ƒO“ٌ‚آ)+ƒ؟]پپ359.7g+ƒ؟
چ‡‚ي‚¹‚ؤ912.7g+ƒ؟
 پƒ12.3g
---------------------
پƒ12.3g
---------------------
 ژَگM‹@‚ح16.6g‚ئڈd‚¢‚ج‚إپA“ٌŒآ‚ئ‚àƒPپ[ƒX‚ً‚ئ‚ê‚خ7gˆت‚حŒy‚‚ب‚è‚»‚¤‚إ‚·پB
ƒXƒLƒbƒh‚جŒy—ت‰»پF10g’ِ“xŒy‚ڈo—ˆ‚»‚¤‚إ‚·پB
ƒAƒپƒ“ƒ{‚جŒy—ت‰»پF8g’ِ“xŒy‚ڈo—ˆ‚»‚¤‚إ‚·پB
ƒeپ[ƒ‹‚ةƒfƒWƒ^ƒ‹ƒTپ[ƒ{HP-DS09SCDپF2gڈd‚‚ب‚è‚ـ‚·پB
BATT‚ًڈ‚ب‚¢‚ج‚ة•د‚¦‚¸‚ئ‚à23g‚حŒy‚‚إ‚«‚éپB
‚ئ‚è‚ ‚¦‚¸پA
900g’ِ“x‚ة”[‚ك‚ç‚ê‚»‚¤پB
335ƒuƒŒپ[ƒh‚ًژg‚¤‚ئڈd‚‚ب‚éپB
—Lگü‚ب‚çپA
310gŒy‚‚ب‚éپB
ƒsƒSƒbƒgپAƒRƒ“ƒfƒ“ƒTپ[پADB-Gun(300g)پAƒŒپ[ƒUپ[—U“±ƒچƒPƒbƒgگ§Œن‚à
ژَگM‹@‚ح16.6g‚ئڈd‚¢‚ج‚إپA“ٌŒآ‚ئ‚àƒPپ[ƒX‚ً‚ئ‚ê‚خ7gˆت‚حŒy‚‚ب‚è‚»‚¤‚إ‚·پB
ƒXƒLƒbƒh‚جŒy—ت‰»پF10g’ِ“xŒy‚ڈo—ˆ‚»‚¤‚إ‚·پB
ƒAƒپƒ“ƒ{‚جŒy—ت‰»پF8g’ِ“xŒy‚ڈo—ˆ‚»‚¤‚إ‚·پB
ƒeپ[ƒ‹‚ةƒfƒWƒ^ƒ‹ƒTپ[ƒ{HP-DS09SCDپF2gڈd‚‚ب‚è‚ـ‚·پB
BATT‚ًڈ‚ب‚¢‚ج‚ة•د‚¦‚¸‚ئ‚à23g‚حŒy‚‚إ‚«‚éپB
‚ئ‚è‚ ‚¦‚¸پA
900g’ِ“x‚ة”[‚ك‚ç‚ê‚»‚¤پB
335ƒuƒŒپ[ƒh‚ًژg‚¤‚ئڈd‚‚ب‚éپB
—Lگü‚ب‚çپA
310gŒy‚‚ب‚éپB
ƒsƒSƒbƒgپAƒRƒ“ƒfƒ“ƒTپ[پADB-Gun(300g)پAƒŒپ[ƒUپ[—U“±ƒچƒPƒbƒgگ§Œن‚à
090305
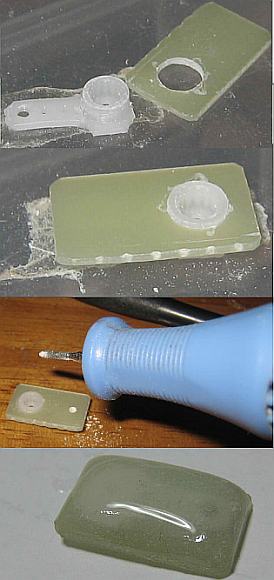
 پƒگù”ص‚إگطچي‚إŒy—ت‰»
پƒگù”ص‚إگطچي‚إŒy—ت‰»
 پƒ3.4+1.3پپ4.7g
پƒ3.4+1.3پپ4.7g
 پƒ14.0gپFƒVƒƒƒbƒtƒgپAƒxƒAƒٹƒ“ƒO‚ً2mm‚ةگف’è
پƒ14.0gپFƒVƒƒƒbƒtƒgپAƒxƒAƒٹƒ“ƒO‚ً2mm‚ةگف’è
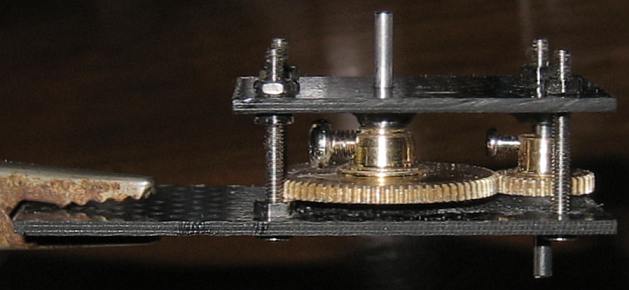 پƒSideView
پƒSideView
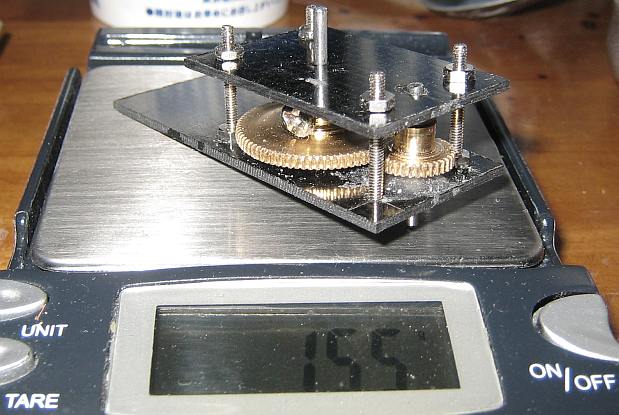 پƒ15.5g
پƒ15.5g
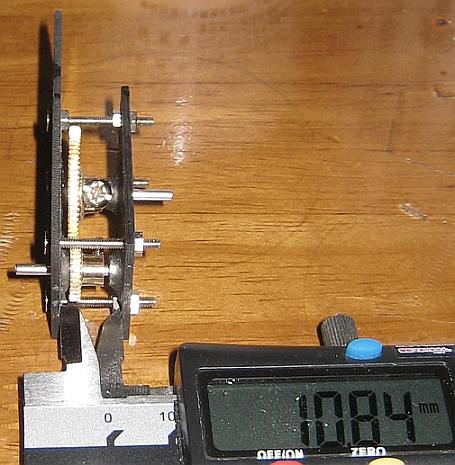 پƒ10.84mm
SUSƒlƒW
ƒCƒ‚ƒlƒW
ƒVƒ€پƒƒAƒ‹ƒ~
پƒ10.84mm
SUSƒlƒW
ƒCƒ‚ƒlƒW
ƒVƒ€پƒƒAƒ‹ƒ~
•ûˆتٹp‰ٌ“ھ—p
چ‚گ¸“xƒfƒWƒ^ƒ‹ƒvƒچƒOƒ‰ƒ}ƒuƒ‹ƒTپ[ƒ{

ƒJƒپƒ‰—p‚ج9VƒŒƒMƒ…ƒŒƒ^(’لƒhƒچƒbƒvƒ^ƒCƒv)

600ƒNƒ‰ƒX‚جگV‚µ‚¢ƒ‚پ[ƒ^پ[‚جƒfƒ‚‚إ‚·‚ھپA
ٹأ‚ك‚ة‚ف‚ؤ‚àپA
‹@ژٌ‚جٹp“x‚ً20پ‹‚إڈd—ح‚ئ’ق‚èچ‡‚¤‚ئ‚·‚é‚ئپBASin20پ‹پپ9.8Kgf
A=9.8/0.34
پc30kg’´‚¦‚ؤ‚é‚©‚àپB
‚¨‚»‚ç‚ڈƒگ³‚ج‹@‘ج‚حپuT-REX 600 ESP Superior ComboپvپA
پœMain Rotor Diameter:970mm
پœWeight(w/o power system):1370g
پœFlying Weight:Approx 3300g(7.3 lbs)
پœMotor Drive Gear:14T(15T optional)
پœMain Drive Gear:170T
ƒMƒ„”نپپ12:1پ`11.3پF1
500ƒNƒ‰ƒX‚ج‹@‘ج‚ة600‚جƒ‚پ[ƒ^پ[‚ً•t‚¯‚½‚ج‚©‚ئژv‚¢‚ـ‚µ‚½‚ھپA
600‚إ‚·پB
 ”ٍچsژٹشپF‚ظ‚عƒsƒbƒ^ƒٹ4•ھ
ƒ‚پ[ƒ^پ[‚ح
پu600XL Brushless Motor(1650KV)پFRCM-BL600XLپv
پœInput voltage:DC11.1-22.2V 3-6cell Li-Po
Max continuous current:70A/85A(60sec)
Max output power:Approx. 1600W/2000W(60sec)
BATT:THUNDER POWERگ»پ@پ@پƒڈ‚ب‚‚µ‚ؤŒy‚ك‚©‚àپB
”ٍچsژٹشپF‚ظ‚عƒsƒbƒ^ƒٹ4•ھ
ƒ‚پ[ƒ^پ[‚ح
پu600XL Brushless Motor(1650KV)پFRCM-BL600XLپv
پœInput voltage:DC11.1-22.2V 3-6cell Li-Po
Max continuous current:70A/85A(60sec)
Max output power:Approx. 1600W/2000W(60sec)
BATT:THUNDER POWERگ»پ@پ@پƒڈ‚ب‚‚µ‚ؤŒy‚ك‚©‚àپB
 ‚±‚جƒ‚پ[ƒ^پ[‚إ‚ح‘ه‚µ‚½ژ‚؟ڈم‚°”\—ح‚إ
‚ئ‚¢‚¤ƒRƒg‚إپA
‚ب‚ج‚إپA
T-Rex450‚إƒ‚ƒچƒ‚ƒچ‚ًژ‚؟ڈم‚°‚邱‚ئ‚ة‚ئچl‚¦‚ـ‚µ‚½پB
چl‚¦‚ؤ‚ف‚é‚ئƒ‚پ[ƒ^پ[‚ح“d—¬‚إƒgƒ‹ƒN‚ھŒˆ‚ـ‚è‚ـ‚·‚©‚ç
“dŒ¹ژں‘و‚إƒGƒ“ƒWƒ“‚و‚èƒ_ƒCƒŒƒNƒg‚ب‘€چىٹ´‚©‚à‚إ‚·پB
پB
ڈم‰؛“®‚جˆہ’èگ«‚ب‚ا‚ھ•sˆہ—v‘f‚إ‚·پB
ڈ¬‚³‚¢Œج‚ة’ؤ—ژ‚ة‚ح‚©‚ب‚è‹‚¢‚ف‚½‚¢‚إ‚·پB
EPƒRƒ“ƒZƒvƒg‚ح3D—p“r‚إ‚ح‚ب‚¢‚إ‚·‚ھ1400g‚ ‚é‚ج‚ة35A‚جAMP‚إ‚·‚ج‚إپA
ƒZƒbƒeƒBƒ“ƒO‚إ‚¤‚ـ‚Œّ—¦‚ًڈم‚°‚ê‚خپA
‚»‚ج‚‚ç‚¢‚جڈd—ت‚ح•s‰آ”\‚إ‚ح‚ب‚¢‚µ•‰’S‚à‚»‚ê‚ظ‚ا‚إ‚ح‚ب‚¢‚©‚ئپB
‚±‚جƒ‚پ[ƒ^پ[‚إ‚ح‘ه‚µ‚½ژ‚؟ڈم‚°”\—ح‚إ
‚ئ‚¢‚¤ƒRƒg‚إپA
‚ب‚ج‚إپA
T-Rex450‚إƒ‚ƒچƒ‚ƒچ‚ًژ‚؟ڈم‚°‚邱‚ئ‚ة‚ئچl‚¦‚ـ‚µ‚½پB
چl‚¦‚ؤ‚ف‚é‚ئƒ‚پ[ƒ^پ[‚ح“d—¬‚إƒgƒ‹ƒN‚ھŒˆ‚ـ‚è‚ـ‚·‚©‚ç
“dŒ¹ژں‘و‚إƒGƒ“ƒWƒ“‚و‚èƒ_ƒCƒŒƒNƒg‚ب‘€چىٹ´‚©‚à‚إ‚·پB
پB
ڈم‰؛“®‚جˆہ’èگ«‚ب‚ا‚ھ•sˆہ—v‘f‚إ‚·پB
ڈ¬‚³‚¢Œج‚ة’ؤ—ژ‚ة‚ح‚©‚ب‚è‹‚¢‚ف‚½‚¢‚إ‚·پB
EPƒRƒ“ƒZƒvƒg‚ح3D—p“r‚إ‚ح‚ب‚¢‚إ‚·‚ھ1400g‚ ‚é‚ج‚ة35A‚جAMP‚إ‚·‚ج‚إپA
ƒZƒbƒeƒBƒ“ƒO‚إ‚¤‚ـ‚Œّ—¦‚ًڈم‚°‚ê‚خپA
‚»‚ج‚‚ç‚¢‚جڈd—ت‚ح•s‰آ”\‚إ‚ح‚ب‚¢‚µ•‰’S‚à‚»‚ê‚ظ‚ا‚إ‚ح‚ب‚¢‚©‚ئپB

 پƒƒ}ƒEƒ“ƒg‚ج‰ءچH‚ج‚½‚ك‚جچجگ،
پƒƒ}ƒEƒ“ƒg‚ج‰ءچH‚ج‚½‚ك‚جچجگ،
 پƒ‚³‚ç‚ةŒًٹ·پڑ
پƒ‚³‚ç‚ةŒًٹ·پڑ
ƒ‚پ[ƒ^پ[‚جƒpƒڈپ[UP
چ‚‚¢KV’l‚جƒ‚پ[ƒ^‚ًچ‚‚¢‰ٌ“]‚ج‚ـ‚ـچ‚Œ¸‘¬—¦‚إژg—p‚·‚ê‚خ—ا‚¢‚炵‚¢‚إ‚·‚ھپA
“dŒ¹‚ج“dˆ³’l‚ة‚و‚蓯‚¶ƒMƒ„”ن‚إڈ\•ھ‚ب‰ٌ“]گ”‚ھ“¾‚ç‚ê‚éڈêچ‡‚ح
KV’l‚ھ’ل‚¢•û‚ھ‰ٌ“]‚ھˆہ’肵‚ؤ‚¢‚ؤ—ا‚¢‚炵‚¢‚إ‚·پB
(ƒMƒ„”ن‚ئ‰ٌ“]گ”پAٹµگ«ƒ‚پ[ƒپƒ“ƒg‚جƒoƒ‰ƒ“ƒX‚ة‹NˆِپBmrƒض^2ڈd‚³‚و‚葬“x‚ً—Dگ¨‚³‚¹‚½•û‚ھ—ا‚¢پB)
 2209-1820KVپ@پiMax Current-14A/30s)پAپF3057‰~
2209-1820KVپ@پiMax Current-14A/30s)پAپF3057‰~
 پEƒsƒ“ƒNگF‚ج‚â‚آ
‚d‚j‚Tپ|‚O‚O‚O‚UپF2,800‰~
چإˆہƒ‰ƒ“ƒN‚إ‚·‚ھپAˆê‰چإ‘هژ‘±“d—¬20A‚بƒpƒڈپ[ƒAƒbƒv—p‚إ‚·پB
پEگآ
ƒnƒCƒyƒٹƒIƒ“پAHP-Z2213-20
6000‰~‚‚ç‚¢‚جچ‚‰؟‚بƒ‚ƒm‚إ‚·پB
15Aˆت‚إپA‘د‹vگ«‚حچ‚‚¢‚炵‚¢‚إ‚·پB
پE‹â
‚b‚s‚b‚Q‚W‚R‚Uپ|‚R‚V‚O‚O‚g‚…‚Œ‚‰پ@‚R‚V‚O‚O‚j‚uپ@ ‚S‚T‚OƒNƒ‰ƒXپ@ƒwƒٹ—p3,480‰~
‚ئ‚ؤ‚àˆہ‚¢‚ج‚ة3D‚جچ‚ڈo—ح‚ھƒLƒڈ‚¾‚ء‚ؤ•]‰؟‚³‚ê‚ؤ‚ـ‚µ‚½پB
چإ‘هژ‘±“d—¬35A‚ئ‚¢‚¤‚؟‚ه‚ء‚ئ‹ء‚«‚إ‚·پB
پEچ•
Scorpion HK-2221-3595KV- V2پi‚sپ|‚q‚d‚w‚S‚T‚O‚ةچإ“Kپj5,580‰~
”ƒ‚¤‚ة‚حچ‚‚ك‚ب‚ج‚إ‚·‚ھپA
چإ‘هژ‘±“d—¬45AپA475 W‚ئ‚¢‚¤
‚ئ‚ٌ‚إ‚à‚ب‚¢ڈo—ح‚إ‚·پBپƒ4400KV‚جƒ^ƒCƒv‚ح52AپA525W
Œّ—¦‚àچ‚‚‚ؤ‘½‚‚ج3D‚ب‘Iژè‚ة‚àچD‚ـ‚ê‚ؤ‚é‚»‚¤‚إ‚·پB
V2‚حچX‚ةŒّ—¦‚ھچ‚‚¢‚»‚¤‚إ‚·پB
ƒRƒMƒ“ƒO‚ھ‹‚Œإ‚¢‚إ‚·پB
Scorpion HKII-2221-8
Specifications
Stator Diameter 22.0 mm (0.866 in)
Stator Thickness 21.0 mm (0.827 in)
No. of Stator Arms 9
No. of Magnet Poles 6
Motor Wind 8 Turn Delta
Motor Wire 16-Strand 0.21mm
Motor Kv 3595 RPM / Volt
No-Load Current (Io) 2.31 Amps @ 10 volts
Motor Resistance (Rm) 0.024 Ohms
Max Continuous Current 45 Amps
Max Continuous Power 475 Watts
Weight 79 Grams (2.79oz)
Outside Diameter 27.9 mm (1.097 in)
Shaft Diameter 3.17 mm (0.125 in)
Body Length 33.6 mm (1.323 in)
Overall Shaft Length 58.7 mm (2.311 in)
Max Lipo Cell 3s
----------------
‚ئ‚è‚ ‚¦‚¸پA
–³“ï‚ة‘هڈo—ح‚إچs‚±‚¤‚ئژv‚¢‚ـ‚·پB
پEƒsƒ“ƒNگF‚ج‚â‚آ
‚d‚j‚Tپ|‚O‚O‚O‚UپF2,800‰~
چإˆہƒ‰ƒ“ƒN‚إ‚·‚ھپAˆê‰چإ‘هژ‘±“d—¬20A‚بƒpƒڈپ[ƒAƒbƒv—p‚إ‚·پB
پEگآ
ƒnƒCƒyƒٹƒIƒ“پAHP-Z2213-20
6000‰~‚‚ç‚¢‚جچ‚‰؟‚بƒ‚ƒm‚إ‚·پB
15Aˆت‚إپA‘د‹vگ«‚حچ‚‚¢‚炵‚¢‚إ‚·پB
پE‹â
‚b‚s‚b‚Q‚W‚R‚Uپ|‚R‚V‚O‚O‚g‚…‚Œ‚‰پ@‚R‚V‚O‚O‚j‚uپ@ ‚S‚T‚OƒNƒ‰ƒXپ@ƒwƒٹ—p3,480‰~
‚ئ‚ؤ‚àˆہ‚¢‚ج‚ة3D‚جچ‚ڈo—ح‚ھƒLƒڈ‚¾‚ء‚ؤ•]‰؟‚³‚ê‚ؤ‚ـ‚µ‚½پB
چإ‘هژ‘±“d—¬35A‚ئ‚¢‚¤‚؟‚ه‚ء‚ئ‹ء‚«‚إ‚·پB
پEچ•
Scorpion HK-2221-3595KV- V2پi‚sپ|‚q‚d‚w‚S‚T‚O‚ةچإ“Kپj5,580‰~
”ƒ‚¤‚ة‚حچ‚‚ك‚ب‚ج‚إ‚·‚ھپA
چإ‘هژ‘±“d—¬45AپA475 W‚ئ‚¢‚¤
‚ئ‚ٌ‚إ‚à‚ب‚¢ڈo—ح‚إ‚·پBپƒ4400KV‚جƒ^ƒCƒv‚ح52AپA525W
Œّ—¦‚àچ‚‚‚ؤ‘½‚‚ج3D‚ب‘Iژè‚ة‚àچD‚ـ‚ê‚ؤ‚é‚»‚¤‚إ‚·پB
V2‚حچX‚ةŒّ—¦‚ھچ‚‚¢‚»‚¤‚إ‚·پB
ƒRƒMƒ“ƒO‚ھ‹‚Œإ‚¢‚إ‚·پB
Scorpion HKII-2221-8
Specifications
Stator Diameter 22.0 mm (0.866 in)
Stator Thickness 21.0 mm (0.827 in)
No. of Stator Arms 9
No. of Magnet Poles 6
Motor Wind 8 Turn Delta
Motor Wire 16-Strand 0.21mm
Motor Kv 3595 RPM / Volt
No-Load Current (Io) 2.31 Amps @ 10 volts
Motor Resistance (Rm) 0.024 Ohms
Max Continuous Current 45 Amps
Max Continuous Power 475 Watts
Weight 79 Grams (2.79oz)
Outside Diameter 27.9 mm (1.097 in)
Shaft Diameter 3.17 mm (0.125 in)
Body Length 33.6 mm (1.323 in)
Overall Shaft Length 58.7 mm (2.311 in)
Max Lipo Cell 3s
----------------
‚ئ‚è‚ ‚¦‚¸پA
–³“ï‚ة‘هڈo—ح‚إچs‚±‚¤‚ئژv‚¢‚ـ‚·پB
 پƒƒMƒ„پF11T
ƒoƒJƒfƒJƒC‚ج‚إƒMƒٹƒMƒٹ‚إ‚·پB
پƒƒMƒ„پF11T
ƒoƒJƒfƒJƒC‚ج‚إƒMƒٹƒMƒٹ‚إ‚·پB
 پ@AMP‚حBEC•t‚«‚جˆہ‚ك‚إˆê‰–³“ï‚بپB
GWS Brushless ESC 35AپFGWESC35AپF4,580‰~
پ@AMP‚حBEC•t‚«‚جˆہ‚ك‚إˆê‰–³“ï‚بپB
GWS Brushless ESC 35AپFGWESC35AپF4,580‰~
 50Aˆت‚ ‚é4200‰~‚à‚ ‚ء‚½‚ج‚إ‚·‚ھپBپƒBEC–³‚µ
‘¼‚ةپAƒGƒ“ƒ‹پ[ƒg‚ج‚ھˆہ‚¢‚إ‚·پB
50Aˆت‚ ‚é4200‰~‚à‚ ‚ء‚½‚ج‚إ‚·‚ھپBپƒBEC–³‚µ
‘¼‚ةپAƒGƒ“ƒ‹پ[ƒg‚ج‚ھˆہ‚¢‚إ‚·پB
پ@‚ش‚آ‚¯‚é‚‚ç‚¢‚إ‰َ‚ê‚»‚¤‚إ—ٹ‚è‚ب‚¢•”•i‚ج‹‰»پB
ƒپƒ^ƒ‹ƒtƒ‰ƒCƒoپ[ƒVپ[ƒ\پ[ƒzƒ‹ƒ_پ[/ƒ_پ[ƒNƒuƒ‹پ[پ@پƒ‰َ‚ê‚â‚·‚»‚¤‚ب‚ج‚إپB
ƒپƒ^ƒ‹ƒtƒ‰ƒCƒoپ[ƒRƒ“ƒgƒچپ[ƒ‹ƒZƒbƒg/ƒ_پ[ƒNƒuƒ‹پ[(450V2—pپjپƒXL‚àگ،–@‚ةˆل‚¢‚ھ–³‚¢‚إ‚·‚ج‚إOKپI
CNCƒAƒ‹ƒ~ ƒXƒڈƒbƒVƒ…ƒvƒŒپ[ƒg- Trex 450X-XL—pپAٹوڈن¥Œy—تپF‰؟ٹi : \1,657پƒ‚½‚ـ‚½‚ـˆہ‚©‚ء‚½‚ج‚إپ™
ƒپƒ^ƒ‹ƒeپ[ƒ‹ƒ†ƒjƒbƒgپiگآپjƒپƒ^ƒ‹گ»پ@T-REX450X/XLگê—pپ@پƒ‚±‚ê‚àˆہ”„‚èپB
ƒڈƒbƒVƒ…ƒAƒEƒgƒxپ[ƒXپ@ƒپƒ^ƒ‹گ»پ@پƒ’چ•¶‚ج‚آ‚¢‚إ‚ة’چ•¶
ƒپƒ^ƒ‹ƒچپ[ƒ^ƒnƒEƒWƒ“ƒOپiگآپjپƒ’چ•¶‚ج‚آ‚¢‚إ‚ة’چ•¶

 ژc‚ء‚½ˆê•”‚جژ÷ژ‰‚بƒAپ[ƒ€پF’P‘ج‚ً’T‚·پB
ƒچپ[ƒ^پ[ƒOƒٹƒbƒvپF”ٌڈي‚ةچ‚‰؟‚إ‚·‚ج‚إژg‚¢ژج‚ؤ‚ھ—ا‚¢‚ئ”»’fپB
(ƒXƒ‰ƒXƒgƒxƒAƒٹƒ“ƒO‚ح—ا‚³‚°‚إ‚·)
ژc‚ء‚½ˆê•”‚جژ÷ژ‰‚بƒAپ[ƒ€پF’P‘ج‚ً’T‚·پB
ƒچپ[ƒ^پ[ƒOƒٹƒbƒvپF”ٌڈي‚ةچ‚‰؟‚إ‚·‚ج‚إژg‚¢ژج‚ؤ‚ھ—ا‚¢‚ئ”»’fپB
(ƒXƒ‰ƒXƒgƒxƒAƒٹƒ“ƒO‚ح—ا‚³‚°‚إ‚·)
—Lگü‰^—pژ‚جڈd—تپBپ@پƒ‘ه‚µ‚ؤڈd‚‚ب‚ء‚ؤ‚ب‚¢‚ج‚ھ‹ء‚«‚إ‚·پB
 پƒ534g
BATT‹ى“®پB
پƒ534g
BATT‹ى“®پB
 پƒ716g
716
+16.6(ژَ)+15.5(‰ٌ“ھ•”)+0.4(BB)
+12.3(ƒJƒپƒ‰)+2(ƒŒƒMƒ…ƒŒƒ^)
+2.5(ƒeپ[ƒ‹—pƒfƒWƒ^ƒ‹ƒTپ[ƒ{)
+130-6.7(3ژ²ƒWƒƒƒCƒچ)
+38(ƒAƒپƒ“ƒ{)
+7(LD)
ƒ؟پپ(ƒVƒƒƒbƒtƒg)+(”آ)+(”ٍ‚ر“¹‹ï)
‘چŒvپF716+217.5+ƒ؟پپ933.6g
پƒ716g
716
+16.6(ژَ)+15.5(‰ٌ“ھ•”)+0.4(BB)
+12.3(ƒJƒپƒ‰)+2(ƒŒƒMƒ…ƒŒƒ^)
+2.5(ƒeپ[ƒ‹—pƒfƒWƒ^ƒ‹ƒTپ[ƒ{)
+130-6.7(3ژ²ƒWƒƒƒCƒچ)
+38(ƒAƒپƒ“ƒ{)
+7(LD)
ƒ؟پپ(ƒVƒƒƒbƒtƒg)+(”آ)+(”ٍ‚ر“¹‹ï)
‘چŒvپF716+217.5+ƒ؟پپ933.6g
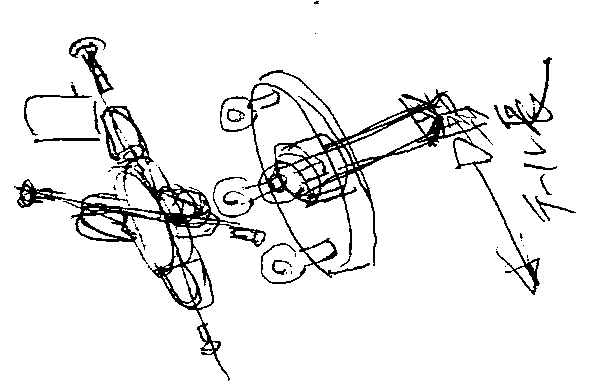
ƒRƒR‚جƒAپ[ƒ€‚ح‰طڑّ‚ب‚ج‚ةژ÷ژ‰‚ب‚ج‚إپA’²گ®‰سڈٹ‚ھ‘‚¦‚ـ‚·‚ھپA
‹à‘®‚ئƒ†ƒjƒoپ[ƒTƒ‹ƒWƒ‡ƒCƒ“ƒg‚ج‘g‚فچ‡‚ي‚¹‚ھڈo—ˆ‚ê‚خ—ا‚¢‚إ‚·‚ثپB
‚±‚جگ}‚جڈêچ‡پAƒVƒ“ƒvƒ‹‚ة•`‚«‚ـ‚µ‚½‚ھپA
گع‘±•”•ھ‚ة‰،•ûŒü‚ة—ح‚ھ‰ء‚ي‚é‚ج‚ھƒ_ƒپ‚ب‚çگ‚’¼‚ة‚·‚ê‚خ—ا‚¢‚إ‚·پB
 ژ—‚½‚ج‚ھ‚ ‚é‚ج‚ًŒ©‚آ‚¯‚ـ‚µ‚½پB
ژ—‚½‚ج‚ھ‚ ‚é‚ج‚ًŒ©‚آ‚¯‚ـ‚µ‚½پB
 ‹@‘ج‚جچ\‘¢“I‹¤گUژü”gگ”‚حƒپƒCƒ“ƒچپ[ƒ^پ[گU“®گ”‚و‚è‚à’ل‚¢ژüٹْ‚ةگف’肳‚ê‚ê‚خˆہگS‚إ‚·پBپƒŒy‚‚ؤچ„گ«‚ھچ‚‚¢‚ئ–â‘肾‚ء‚½‚èپB
‹@‘ج‚جچ\‘¢“I‹¤گUژü”gگ”‚حƒپƒCƒ“ƒچپ[ƒ^پ[گU“®گ”‚و‚è‚à’ل‚¢ژüٹْ‚ةگف’肳‚ê‚ê‚خˆہگS‚إ‚·پBپƒŒy‚‚ؤچ„گ«‚ھچ‚‚¢‚ئ–â‘肾‚ء‚½‚èپB
“dŒ¹‚ح‚»‚ê‚ب‚è‚جƒ‚ƒm‚ھƒRƒXƒgƒpƒtƒHپ[ƒ}ƒ“ƒX‚ھڈم‚ھ‚è‚»‚¤‚إ‚·پB
 *3
*3
 ژُ–½‚ً’ک‚µ‚ڈk‚ك‚é‚ج‚ح‰ك•ْ“d‚ئ‚¢‚¤‚炵‚¢‚ج‚إپBƒ\ƒR‚ھچl‚¦‚ا‚±‚ë‚إ‚·پB
پuCellMeter-8پv‚ئ‚¢‚¤‚ج‚حژc—تپAƒZƒ‹‚جƒoƒ‰ƒ“ƒXپAگ„—ح‚âŒّ—¦‚ـ‚إ•\ژ¦‚إ‚«‚é‚»‚¤‚إ‚·پB
ژُ–½‚ً’ک‚µ‚ڈk‚ك‚é‚ج‚ح‰ك•ْ“d‚ئ‚¢‚¤‚炵‚¢‚ج‚إپBƒ\ƒR‚ھچl‚¦‚ا‚±‚ë‚إ‚·پB
پuCellMeter-8پv‚ئ‚¢‚¤‚ج‚حژc—تپAƒZƒ‹‚جƒoƒ‰ƒ“ƒXپAگ„—ح‚âŒّ—¦‚ـ‚إ•\ژ¦‚إ‚«‚é‚»‚¤‚إ‚·پB
 1C‚بڈ[“dٹي‚إ‚·پB
‹@”\‚حچإ‘ه1C‚ج“d—¬‚إ1Cell‚ھŒµ–§‚ة4.200V‚ًژ¦‚µپA
ٹ®—¹‚µ‚½‚ç‚»‚ê‚ًˆغژ‚·‚é‚و‚¤‚ةڈo—ˆ‚ؤ‚¨‚è‚ـ‚·پB
پcƒjƒbƒJƒh‚ج‚و‚¤‚ة—â‹p‚µ‚ب‚ھ‚ç‹}‘¬ڈ[“d‚ھ—ا‚¢‚ئ‚©‚ ‚é‚ج‚إ‚µ‚ه‚¤‚©پB
2009ڈt
‚Q‚آ‚جBATTƒpƒbƒN‚ً‚QC‚إڈ[“dڈo—ˆ‚é‚ج‚ًچw“ü‚إ‚·پB
‚µ‚©‚µپAƒoƒ‰ƒ“ƒTپ[‚ھ•iگط‚ê’†‚إ‚PŒآ‚ج‚ف‚إ‚·پB
1C‚بڈ[“dٹي‚إ‚·پB
‹@”\‚حچإ‘ه1C‚ج“d—¬‚إ1Cell‚ھŒµ–§‚ة4.200V‚ًژ¦‚µپA
ٹ®—¹‚µ‚½‚ç‚»‚ê‚ًˆغژ‚·‚é‚و‚¤‚ةڈo—ˆ‚ؤ‚¨‚è‚ـ‚·پB
پcƒjƒbƒJƒh‚ج‚و‚¤‚ة—â‹p‚µ‚ب‚ھ‚ç‹}‘¬ڈ[“d‚ھ—ا‚¢‚ئ‚©‚ ‚é‚ج‚إ‚µ‚ه‚¤‚©پB
2009ڈt
‚Q‚آ‚جBATTƒpƒbƒN‚ً‚QC‚إڈ[“dڈo—ˆ‚é‚ج‚ًچw“ü‚إ‚·پB
‚µ‚©‚µپAƒoƒ‰ƒ“ƒTپ[‚ھ•iگط‚ê’†‚إ‚PŒآ‚ج‚ف‚إ‚·پB
 پ@پƒ
گà–¾ڈ‘‚ة‚ح3Cڈ[“d‚ح‚ ‚ـ‚èˆس–،‚ھ‚ب‚¢‚ئ‚©‚¢‚ؤ‚ ‚è‚ـ‚·پB
‚إ‚àپA
ƒnƒCƒyƒٹƒIƒ“‚جBATT‚ح‚³‚ظ‚اچ‚‰؟‚إ‚à‚ب‚‚ؤ‚TCڈ[“d‚ھڈo—ˆ‚ؤژُ–½4”{‚ئڈ‘‚¢‚ؤ‚ ‚é‚ج‚إ‚·‚ھپA
پ@پƒ
گà–¾ڈ‘‚ة‚ح3Cڈ[“d‚ح‚ ‚ـ‚èˆس–،‚ھ‚ب‚¢‚ئ‚©‚¢‚ؤ‚ ‚è‚ـ‚·پB
‚إ‚àپA
ƒnƒCƒyƒٹƒIƒ“‚جBATT‚ح‚³‚ظ‚اچ‚‰؟‚إ‚à‚ب‚‚ؤ‚TCڈ[“d‚ھڈo—ˆ‚ؤژُ–½4”{‚ئڈ‘‚¢‚ؤ‚ ‚é‚ج‚إ‚·‚ھپA
چ،ŒمپA
‚r‚R‚P‚T‚S’´ڈ¬Œ^ƒ}ƒCƒNƒچƒfƒWƒ^ƒ‹ƒTپ[ƒ{ 2,552‰~
335mm–طگ»ƒچپ[ƒ^پ[
ƒXƒLƒbƒh‚ًƒnƒY‚µ‚ؤƒAƒپƒ“ƒ{پH
Metal Tail Rotor Control Arm Set
HS1295 USD$7.99
450 Landing Skid Set/White
HS1294-01 USD$7.99
Stainless Steel Ball Parts HS1155
[HS1155]
USD$11.99
پœAluminum SF mixing lever x 2
“d“®‚·‚ׂؤ‚ًƒJƒoپ[‚·‚é80پ`90A‚جAMP‚ھ—~‚µ‚¢ƒgƒR‚إ‚·پB
AMP‚حƒ‚پ[ƒ^پ[‚ئˆل‚ء‚ؤپA
”M—e—ت‚ھڈ‚ب‚¢‚ج‚©پA
“d—¬‚ة‚و‚ء‚ؤ”نٹr“Iڈuژ‚ة”M‚ھڈم‚ھ‚é‚ج‚إ‰َ‚ê‚é‚و‚¤‚إ‚·پB
‚ ‚ئپA‚‚ء‚آ‚¢‚ؤ‚éBEC‚ة‚و‚ء‚ؤƒTپ[ƒ{“d—¬‚جگ§–ٌ‚ھ‚ ‚邽‚كپA
‚Rژ²ƒWƒƒƒCƒچ‚إ‚حپA•‰’S‚ھ‘ه‚«‚¢‚©‚à‚µ‚ê‚ـ‚¹‚ٌپB
BEC‚ئƒRƒ“ƒgƒچپ[ƒ‰پ[‚ئڈI’i‚ج”¼“±‘ج‚ھ•تپX‚ةژg‚¦‚ê‚خپcپA
ƒ‚ƒfƒ‹ƒNƒ‰ƒtƒg‚ج50A‚بˆہ‚¢‚ج‚ةBEC‚ً•t‰ء‚إ‚à—ا‚¢‚©‚ئ‚¨‚à‚¢‚ـ‚µ‚½پB
‚آ‚¢‚إ‚ةچl‚¦‚½‚ج‚إ‚·‚ھپA
ƒXƒCƒbƒ`ƒ“ƒO‚جBEC‚ئ‚حŒّ—¦–ت‚إ”ن‚ׂà‚ج‚ة‚ب‚ç‚ب‚¢‚ج‚إ‚·‚ھپA
ƒŒƒMƒ…ƒŒƒ^IC‚إڈo—ˆ‚ـ‚·‚ثپB
“d—¬‚ئ””M‚ئ‚جٹضŒW‚ح—ژچ·“dˆ³‚إŒˆ‚ـ‚è‚ـ‚·‚©‚çپB
’تڈي‚ح5A’ِ“x‚إ‚àپA•ْ”MƒtƒBƒ“‚ئFAN‚ة‚و‚é‹گ§‹َ—â‚ة‚ؤ20A‚ئ‚©ƒCƒP‚»‚¤‚إ‚·پB
‹َ—â‚ئŒ¾‚¦‚خƒ‚پ[ƒ^پ[‚ج‰ٌ“]گ”‚ح‹°‚낵‚چ‚‚¢‚ج‚ؤ—LŒّ—ک—p‚إ‚·‚ثپB


 پƒ17.4g
پƒ17.4g
 پƒ26.5g
پƒ26.5g
 پƒ34.8g
پƒ34.8g
 پƒچ\‘z“IƒCƒپپ[ƒWگ}
ƒeپ[ƒ‹‚ةپA
“ء”„•i‚جfutaba‚ج’´ڈ¬Œ^چ‚‘¬ƒfƒWƒ^ƒ‹ƒ}ƒCƒNƒچƒTپ[ƒ{S3154پ@پƒ2552‰~
پƒچ\‘z“IƒCƒپپ[ƒWگ}
ƒeپ[ƒ‹‚ةپA
“ء”„•i‚جfutaba‚ج’´ڈ¬Œ^چ‚‘¬ƒfƒWƒ^ƒ‹ƒ}ƒCƒNƒچƒTپ[ƒ{S3154پ@پƒ2552‰~
 =-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=
=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=
090312
 پƒƒس0.8mmŒٹ01
پƒƒس0.8mmŒٹ01
 پƒƒس0.8mmŒٹ02
پƒƒس0.8mmŒٹ02
 پƒƒس0.8mmŒٹ03
پƒƒس0.8mmŒٹ03
 پƒŒٹ‚ً1mm‚ةٹg‘هƒhƒٹƒ‹ژ²(ƒ^ƒ“ƒOƒXƒeƒ“?)‚ء‚ًگط’f‚µپAڈu’…‚إŒإ’èپB
پƒŒٹ‚ً1mm‚ةٹg‘هƒhƒٹƒ‹ژ²(ƒ^ƒ“ƒOƒXƒeƒ“?)‚ء‚ًگط’f‚µپAڈu’…‚إŒإ’èپB
 پƒ‚·‚¶‚ًŒ@‚ء‚ؤ‚»‚جچa‚ةƒnƒپ‚é‚إ‚·پB
پƒ‚·‚¶‚ًŒ@‚ء‚ؤ‚»‚جچa‚ةƒnƒپ‚é‚إ‚·پB
 پƒ‚±‚ٌ‚بٹ´‚¶‚إ‚·پB
ٹڑ‚فچ‚ٌ‚إ‚¢‚邽‚كƒKƒ^‚حٹF–³‚إ‚·پB
پƒ‚±‚ٌ‚بٹ´‚¶‚إ‚·پB
ٹڑ‚فچ‚ٌ‚إ‚¢‚邽‚كƒKƒ^‚حٹF–³‚إ‚·پB
 پƒƒCƒپپ[ƒW1
پƒƒCƒپپ[ƒW1
 پƒƒCƒپپ[ƒW2
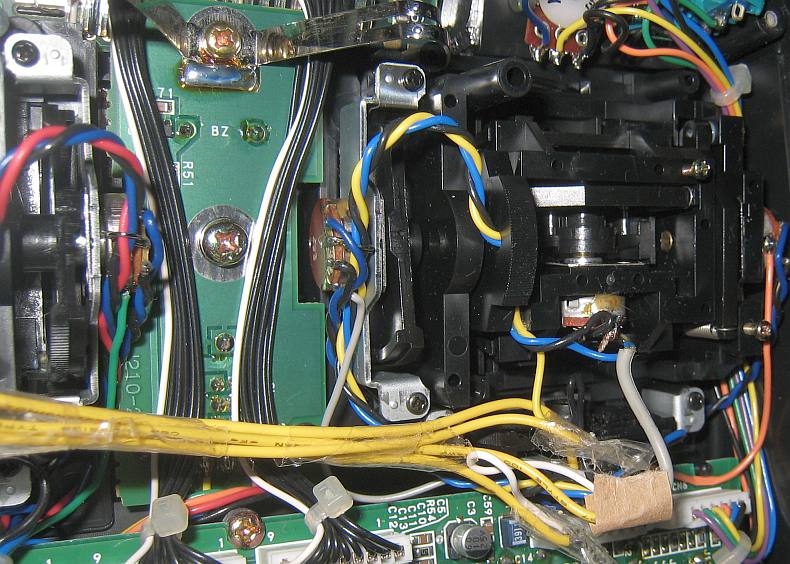
‚إپAƒfƒWƒ^ƒ‹ƒTپ[ƒ{‚ًUSB‚ةگع‘±‚µ‚ؤپA
‰آ“®ٹp“x‚ً140پ‹‚ةچL‚°‚ـ‚µ‚½پB
ƒvƒچƒ|‚إ“®‚©‚µ‚ؤ‚ف‚é‚ئ‚»‚ج’ت‚è‚ة‚ب‚ء‚ؤ‚¨‚èپA
ƒMƒ„‚ً•t‚¯‚é‚ئپA
140*80/25پپ320پ‹‚إپA‚ظ‚عˆê‰ٌ“]‚µ‚ؤ‚ـ‚·پB
‚±‚ج‚ئ‚«پA
ƒfƒ…ƒAƒ‹ƒŒپ[ƒg‚ھ100پ“‚إ‚µ‚½‚ج‚إپA
ƒTپ[ƒ{‚ھ210پ‹‰ٌ‚é‚و‚¤‚ة‚ب‚è‚ـ‚µ‚½پB
چإ‘ه‚ج150ƒpپ[ƒZƒ“ƒg‚ة‚µ‚½‚çپA
‚آ‚ـ‚èپA
ƒMƒ„‚ً•t‚¯‚é‚ئ210*80/35پپ480پ‹‰ٌ‚ء‚ؤ‚µ‚ـ‚¢‚ـ‚µ‚½پB
گ¸“x‚ً—Dگو‚·‚é‚ب‚çپA
•t‚¯‚ب‚‚ؤ—ا‚¢ƒRƒg‚ة‚ب‚è‚ـ‚·‚ھپA
‘¬“x‚ً—Dگو‚³‚¹‚é‚ئپAƒMƒ„‚ح•K—v‚ئ‚ب‚è‚ـ‚·پB
پƒƒCƒپپ[ƒW2
‚إپAƒfƒWƒ^ƒ‹ƒTپ[ƒ{‚ًUSB‚ةگع‘±‚µ‚ؤپA
‰آ“®ٹp“x‚ً140پ‹‚ةچL‚°‚ـ‚µ‚½پB
ƒvƒچƒ|‚إ“®‚©‚µ‚ؤ‚ف‚é‚ئ‚»‚ج’ت‚è‚ة‚ب‚ء‚ؤ‚¨‚èپA
ƒMƒ„‚ً•t‚¯‚é‚ئپA
140*80/25پپ320پ‹‚إپA‚ظ‚عˆê‰ٌ“]‚µ‚ؤ‚ـ‚·پB
‚±‚ج‚ئ‚«پA
ƒfƒ…ƒAƒ‹ƒŒپ[ƒg‚ھ100پ“‚إ‚µ‚½‚ج‚إپA
ƒTپ[ƒ{‚ھ210پ‹‰ٌ‚é‚و‚¤‚ة‚ب‚è‚ـ‚µ‚½پB
چإ‘ه‚ج150ƒpپ[ƒZƒ“ƒg‚ة‚µ‚½‚çپA
‚آ‚ـ‚èپA
ƒMƒ„‚ً•t‚¯‚é‚ئ210*80/35پپ480پ‹‰ٌ‚ء‚ؤ‚µ‚ـ‚¢‚ـ‚µ‚½پB
گ¸“x‚ً—Dگو‚·‚é‚ب‚çپA
•t‚¯‚ب‚‚ؤ—ا‚¢ƒRƒg‚ة‚ب‚è‚ـ‚·‚ھپA
‘¬“x‚ً—Dگو‚³‚¹‚é‚ئپAƒMƒ„‚ح•K—v‚ئ‚ب‚è‚ـ‚·پB
‘S”ُڈd—تپ@پi‚Rژ²ƒWƒƒƒCƒچپAGWSAMPپASorpionMotorپA325–طگ»ƒچپ[ƒ^پ[پj
 پƒ930g
‚±‚جAMP‚ًڈ‰ژg—p‚·‚é‚آ‚à‚è‚ھ–â‘è”گ¶پB
ƒ‚پ[ƒ^پ[‚ج‰ٌ“]•ûŒüٹm”F‚ج‚½‚كپA
GWS‚جAMP‚ة11.1V‚جˆہ’艻“dŒ¹‚ً‚آ‚ب‚°
ƒJƒŒƒ“ƒgƒٹƒ~ƒbƒ^پ[‚ً‚RA‚ةگف’è‚¢‚½‚µ‚ـ‚µ‚½پB
‚»‚µ‚ؤپAƒAƒ‰پ[ƒ€‚ھ–آ‚ء‚ؤƒXƒچƒbƒgƒ‹‚ً”÷“®‚³‚¹‚ؤ
‚؟‚ه‚ء‚ئ‰ٌ“]‚³‚¹‚إ1.5•b‚®‚ç‚¢ŒمپA
ƒGƒ‰پ[‚炵‚«ƒAƒ‰پ[ƒ€‚ھکA‘±‚µ‚ؤ‚邾‚¯پB
‚ا‚¤‚â‚çAMP‚ھ‰َ‚ê‚ـ‚µ‚½پB
‚±‚جڈêچ‡“d—¬‚ھˆê’è‚ب‚±‚ئ‚إ“dŒ¹“dˆ³چ~‰؛‚ھ‹N‚±‚é‚ج‚إŒجڈل‚µ‚ب‚¢‚ح‚¸‚ب‚ج‚إ‚·‚ھپA
ƒXƒCƒbƒ`ƒ“ƒO—p‚ج”¼“±‘ج‚ة‹ں‹‹‚·‚é“dˆ³‚ھ‰؛‚ھ‚ء‚ؤ
”¼“±‘ج‚جON’ïچR’l‚جڈمڈ¸‚ھŒ´ˆِ‚ة‚و‚éƒTپ[ƒ}ƒ‹ƒNƒ‰ƒbƒVƒ…‚©‚à‚µ‚ê‚ـ‚¹‚ٌپB
(ژہ‚حپAŒمڈq‚·‚éƒGƒ‰پ[‚إ‚µ‚½پB)پ@پƒگà–¾ڈ‘‚ً“ا‚ك‚خ‚ ‚é‚إ‚·پB
پƒ930g
‚±‚جAMP‚ًڈ‰ژg—p‚·‚é‚آ‚à‚è‚ھ–â‘è”گ¶پB
ƒ‚پ[ƒ^پ[‚ج‰ٌ“]•ûŒüٹm”F‚ج‚½‚كپA
GWS‚جAMP‚ة11.1V‚جˆہ’艻“dŒ¹‚ً‚آ‚ب‚°
ƒJƒŒƒ“ƒgƒٹƒ~ƒbƒ^پ[‚ً‚RA‚ةگف’è‚¢‚½‚µ‚ـ‚µ‚½پB
‚»‚µ‚ؤپAƒAƒ‰پ[ƒ€‚ھ–آ‚ء‚ؤƒXƒچƒbƒgƒ‹‚ً”÷“®‚³‚¹‚ؤ
‚؟‚ه‚ء‚ئ‰ٌ“]‚³‚¹‚إ1.5•b‚®‚ç‚¢ŒمپA
ƒGƒ‰پ[‚炵‚«ƒAƒ‰پ[ƒ€‚ھکA‘±‚µ‚ؤ‚邾‚¯پB
‚ا‚¤‚â‚çAMP‚ھ‰َ‚ê‚ـ‚µ‚½پB
‚±‚جڈêچ‡“d—¬‚ھˆê’è‚ب‚±‚ئ‚إ“dŒ¹“dˆ³چ~‰؛‚ھ‹N‚±‚é‚ج‚إŒجڈل‚µ‚ب‚¢‚ح‚¸‚ب‚ج‚إ‚·‚ھپA
ƒXƒCƒbƒ`ƒ“ƒO—p‚ج”¼“±‘ج‚ة‹ں‹‹‚·‚é“dˆ³‚ھ‰؛‚ھ‚ء‚ؤ
”¼“±‘ج‚جON’ïچR’l‚جڈمڈ¸‚ھŒ´ˆِ‚ة‚و‚éƒTپ[ƒ}ƒ‹ƒNƒ‰ƒbƒVƒ…‚©‚à‚µ‚ê‚ـ‚¹‚ٌپB
(ژہ‚حپAŒمڈq‚·‚éƒGƒ‰پ[‚إ‚µ‚½پB)پ@پƒگà–¾ڈ‘‚ً“ا‚ك‚خ‚ ‚é‚إ‚·پB
پ@ƒŒƒCƒAƒEƒg‚ة–â‘è‚ھƒAƒٹ‚إ‚·پB
پEƒXƒ^ƒrƒ‰ƒCƒUپ[‚ئƒWƒƒƒCƒچپAƒJƒپƒ‰ƒ†ƒjƒbƒg‚جٹ±ڈآپB
پEƒJƒپƒ‰ƒ†ƒjƒbƒg‚ئ“d’r‚جٹ±ڈآپB
ƒXƒ^ƒrƒ‰ƒCƒUپ[‚جŒX‚«‚ةگ§Œہ‚ً‚آ‚¯‚éپB
ƒWƒƒƒCƒچ‚ً”–‚¢ƒeپ[ƒv‚ة‚·‚éپB
 ƒoƒbƒeƒٹپ[‚ً“®‚©‚·‚ج‚ة‚ح‚؟‚ه‚ء‚ئپcپA
ƒoƒbƒeƒٹپ[‚ً“®‚©‚·‚ج‚ة‚ح‚؟‚ه‚ء‚ئپcپA
 ‰،’u‚«‚إچs‚±‚¤‚ئژv‚¢‚ـ‚·پB
‰،’u‚«‚إچs‚±‚¤‚ئژv‚¢‚ـ‚·پB
 —Lگü‚إBATT‘م‚ي‚è‚ة‚·‚éƒIƒ‚ƒٹپB
—Lگü‚إBATT‘م‚ي‚è‚ة‚·‚éƒIƒ‚ƒٹپB
 پƒƒ€ƒٹ
------------
ƒ†ƒjƒbƒg‚ً‘O•û‚ة‰„’·پB
ƒTپ[ƒ{‚ً‰،Œü‚«‚ة‚آ‚¯‚éپB
پƒƒ€ƒٹ
------------
ƒ†ƒjƒbƒg‚ً‘O•û‚ة‰„’·پB
ƒTپ[ƒ{‚ً‰،Œü‚«‚ة‚آ‚¯‚éپB
 پƒƒ†ƒjƒbƒg‚ح‚ش‚ç‰؛‚°‚ؤ‚àOK
پƒƒ†ƒjƒbƒg‚ح‚ش‚ç‰؛‚°‚ؤ‚àOK
 پƒƒTپ[ƒ{‚ً‰،‚ة‚µ‚ؤڈم‚ة’u‚¯‚خپA
پƒƒTپ[ƒ{‚ً‰،‚ة‚µ‚ؤڈم‚ة’u‚¯‚خپA
 پƒƒ€ƒٹ
ƒTپ[ƒ{ڈمپAƒ†ƒjƒbƒg‰؛
ƒTپ[ƒ{‰؛پAƒ†ƒjƒbƒg‰؛
ƒTپ[ƒ{ڈمپAƒ†ƒjƒbƒgڈم
ƒTپ[ƒ{‰؛پAƒ†ƒjƒbƒgڈم
------------
ƒWƒƒƒCƒچ‚ض‚جٹ±ڈآپB
EPƒRƒ“ƒZƒvƒg‚جƒXƒ^ƒrƒ‰ƒCƒUپ[‚ج‰ز“®”حˆح‚ةچ‡‚ي‚¹‚ê‚خٹ±ڈآ‚µ‚ب‚¢‚و‚¤‚ة‚ب‚è‚ـ‚·پB
ƒGƒ‹ƒS‚ح‚à‚ء‚ئ‹·‚¢ٹp“x‚إ‚·پB
پƒƒ€ƒٹ
ƒTپ[ƒ{ڈمپAƒ†ƒjƒbƒg‰؛
ƒTپ[ƒ{‰؛پAƒ†ƒjƒbƒg‰؛
ƒTپ[ƒ{ڈمپAƒ†ƒjƒbƒgڈم
ƒTپ[ƒ{‰؛پAƒ†ƒjƒbƒgڈم
------------
ƒWƒƒƒCƒچ‚ض‚جٹ±ڈآپB
EPƒRƒ“ƒZƒvƒg‚جƒXƒ^ƒrƒ‰ƒCƒUپ[‚ج‰ز“®”حˆح‚ةچ‡‚ي‚¹‚ê‚خٹ±ڈآ‚µ‚ب‚¢‚و‚¤‚ة‚ب‚è‚ـ‚·پB
ƒGƒ‹ƒS‚ح‚à‚ء‚ئ‹·‚¢ٹp“x‚إ‚·پB
 پƒ”نٹr
ƒlƒW‚جƒgƒR‚ئ“–‚½‚ء‚ؤگ§Œہ‚³‚ê‚ـ‚·پB
پƒ”نٹr
ƒlƒW‚جƒgƒR‚ئ“–‚½‚ء‚ؤگ§Œہ‚³‚ê‚ـ‚·پB
 پƒ
ƒXƒ^ƒrƒ‰ƒCƒUپ[‚ح‚ذ‚ث‚ء‚½‚肵‚ب‚é‚ج‚إپA
چ‚‰؟‚بƒWƒƒƒCƒچ‚حگâ‘خˆہ‘S‚ة‚µ‚ؤ‚¨‚«‚½‚¢‚ئژv‚¢‚ـ‚µ‚½پB
‚إپA
—ا‚¢ڈêڈٹ‚ًŒ©‚آ‚¯‚ـ‚µ‚½‚ءپ™
پƒ
ƒXƒ^ƒrƒ‰ƒCƒUپ[‚ح‚ذ‚ث‚ء‚½‚肵‚ب‚é‚ج‚إپA
چ‚‰؟‚بƒWƒƒƒCƒچ‚حگâ‘خˆہ‘S‚ة‚µ‚ؤ‚¨‚«‚½‚¢‚ئژv‚¢‚ـ‚µ‚½پB
‚إپA
—ا‚¢ڈêڈٹ‚ًŒ©‚آ‚¯‚ـ‚µ‚½‚ءپ™
 پƒ
پƒ
 پƒ
پƒ
ƒ‚پ[ƒ^پ[پAAMP‚ًƒOƒŒپ[ƒhƒ_ƒEƒ“‚µ‚ؤ‚ـ‚·پB
 پƒ
پƒ
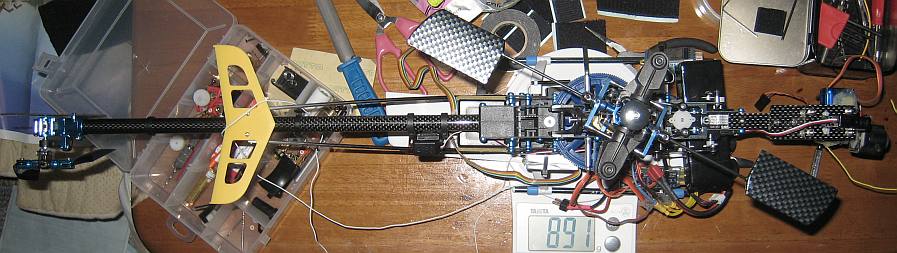 پƒ891g
‚ ‚ئ‚حپA
ƒŒƒMƒ…ƒŒƒ^پAƒTپ[ƒ{‚جŒإ’èپAƒAƒپƒ“ƒ{پAƒsƒSƒbƒg“™
090317
ƒTپ[ƒ{ƒzپ[ƒ“‚ھگـ‚ê‚ؤ‚µ‚ـ‚ء‚½‚ج‚إپAڈC—‚µ‚½‚ج‚إ‚·‚ھپA0.6ƒOƒ‰ƒ€‚ظ‚اڈd‚‚ب‚è‚ـ‚µ‚½پB
پƒ891g
‚ ‚ئ‚حپA
ƒŒƒMƒ…ƒŒƒ^پAƒTپ[ƒ{‚جŒإ’èپAƒAƒپƒ“ƒ{پAƒsƒSƒbƒg“™
090317
ƒTپ[ƒ{ƒzپ[ƒ“‚ھگـ‚ê‚ؤ‚µ‚ـ‚ء‚½‚ج‚إپAڈC—‚µ‚½‚ج‚إ‚·‚ھپA0.6ƒOƒ‰ƒ€‚ظ‚اڈd‚‚ب‚è‚ـ‚µ‚½پB
 ‚±‚ء‚؟‚àپA
ƒٹƒu‚ئ‚©ƒtƒ‰ƒ“ƒWڈَ‚ة‚µ‚ؤچ\‘¢‹“x‚ًڈم‚°‚é‚ئ—ا‚¢‚©‚àپB
‚±‚ء‚؟‚àپA
ƒٹƒu‚ئ‚©ƒtƒ‰ƒ“ƒWڈَ‚ة‚µ‚ؤچ\‘¢‹“x‚ًڈم‚°‚é‚ئ—ا‚¢‚©‚àپB

 ƒgƒ‰ƒbƒLƒ“ƒO
ƒŒƒCƒAƒEƒg
ƒgƒ‰ƒbƒLƒ“ƒO
ƒŒƒCƒAƒEƒg
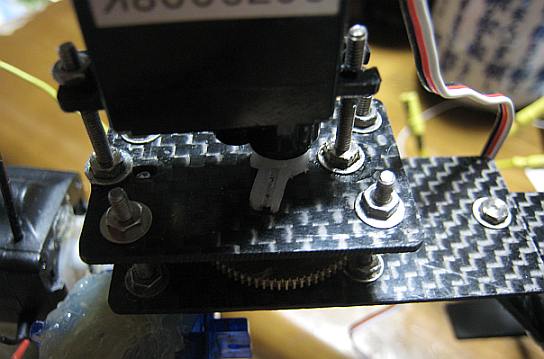
ژہ—p—جˆو‚©‚çٹO‚ꂽڈêچ‡پAƒTپ[ƒ{ƒzپ[ƒ“‚ئƒlƒW‚ھٹ±ڈآ‚·‚邱‚ئ‚ًŒœ”O‚µپA
ƒTپ[ƒ{‚جژو‚è•t‚¯•ûژ®‚ً•دچXپB
 پƒ‰E‘¤‚جƒTپ[ƒ{ژxژƒ{ƒ‹ƒg‚ج“ھ‚ً•‚‚©‚¹‚ـ‚µ‚½پB
پƒ‰E‘¤‚جƒTپ[ƒ{ژxژƒ{ƒ‹ƒg‚ج“ھ‚ً•‚‚©‚¹‚ـ‚µ‚½پB
 پƒƒJپ[ƒ{ƒ“”آ‚ًڈd‚ث‚ؤگع’…‚µپAƒlƒW‚إژ~‚ك‚ؤپB
پƒƒJپ[ƒ{ƒ“”آ‚ًڈd‚ث‚ؤگع’…‚µپAƒlƒW‚إژ~‚ك‚ؤپB
 پƒژxژ—p‚جƒ{ƒ‹ƒg‚ح‰؛‚©‚ç‘}‚µچ‚ف‚ـ‚µ‚½پB
پƒژxژ—p‚جƒ{ƒ‹ƒg‚ح‰؛‚©‚ç‘}‚µچ‚ف‚ـ‚µ‚½پB
 پƒ893g
گ¸–§‚ة‘ھ’肵‚ؤ‘g‚ف—§‚ؤ‚½‚½‚ك‚©ƒgƒ‰ƒbƒLƒ“ƒO‚ح–³’²گ®‚إچ‡‚ء‚ؤ‚ـ‚µ‚½پB
پƒ893g
گ¸–§‚ة‘ھ’肵‚ؤ‘g‚ف—§‚ؤ‚½‚½‚ك‚©ƒgƒ‰ƒbƒLƒ“ƒO‚ح–³’²گ®‚إچ‡‚ء‚ؤ‚ـ‚µ‚½پB
 ƒsƒbƒ`‚ًچ‡‚ي‚¹‚éچغ‚حپA
ƒKƒ^‚ھ‚ ‚é‚ج‚إ‚·‚ھپA
‰ٌ“]‚µ‚ؤ‚¢‚éژ‚ةٹ|‚©‚é•ûŒü‚ةٹٌ‚¹‚ؤ‚¨‚«‚ـ‚·پB
‘¼‚ة‚ح
–طگ»ƒuƒŒپ[ƒh‚حپAژم‚‚ث‚¶‚ê‚é‚ج‚إƒsƒbƒ`ƒQپ[ƒW‚ً
‚ب‚é‚ׂƒuƒŒپ[ƒh‚جچھ–{‚ة‚ح‚ك‚é•K—vگ«‚ھ‚ ‚è‚ـ‚µ‚½پB
ƒoƒ‹ƒT‚ب‚ا‚ج”ٌڈي‚ةŒy‚¢•¨ژ؟‚ًژg‚ء‚ؤ‚¢‚é‚و‚¤‚إپA
‹‚ˆ¬‚é‚ئ’ׂê‚ؤ‚µ‚ـ‚¢‚»‚¤‚إ‚·پB
”ٍچs’†‚à‚ث‚¶‚ê‚ؤ‚é‚ج‚إ‚·‚ھ‰“گS—ح‚à‚©‚©‚ء‚ؤ‚ـ‚·‚ج‚إ•،ژG‚إ‚·پB
ƒچپ[ƒ^پ[‚ج‰„’·پAƒ‚پ[ƒ^پ[پA
AMP‚جڈd—ت‘‰ءپB
ƒŒƒMƒ…ƒŒƒ^پA
ƒTپ[ƒ{‚جŒإ’èپA
ƒAƒپƒ“ƒ{پA
ƒAپ[ƒ€پALDپAƒsƒSƒbƒg“™
ƒsƒbƒ`‚ًچ‡‚ي‚¹‚éچغ‚حپA
ƒKƒ^‚ھ‚ ‚é‚ج‚إ‚·‚ھپA
‰ٌ“]‚µ‚ؤ‚¢‚éژ‚ةٹ|‚©‚é•ûŒü‚ةٹٌ‚¹‚ؤ‚¨‚«‚ـ‚·پB
‘¼‚ة‚ح
–طگ»ƒuƒŒپ[ƒh‚حپAژم‚‚ث‚¶‚ê‚é‚ج‚إƒsƒbƒ`ƒQپ[ƒW‚ً
‚ب‚é‚ׂƒuƒŒپ[ƒh‚جچھ–{‚ة‚ح‚ك‚é•K—vگ«‚ھ‚ ‚è‚ـ‚µ‚½پB
ƒoƒ‹ƒT‚ب‚ا‚ج”ٌڈي‚ةŒy‚¢•¨ژ؟‚ًژg‚ء‚ؤ‚¢‚é‚و‚¤‚إپA
‹‚ˆ¬‚é‚ئ’ׂê‚ؤ‚µ‚ـ‚¢‚»‚¤‚إ‚·پB
”ٍچs’†‚à‚ث‚¶‚ê‚ؤ‚é‚ج‚إ‚·‚ھ‰“گS—ح‚à‚©‚©‚ء‚ؤ‚ـ‚·‚ج‚إ•،ژG‚إ‚·پB
ƒچپ[ƒ^پ[‚ج‰„’·پAƒ‚پ[ƒ^پ[پA
AMP‚جڈd—ت‘‰ءپB
ƒŒƒMƒ…ƒŒƒ^پA
ƒTپ[ƒ{‚جŒإ’èپA
ƒAƒپƒ“ƒ{پA
ƒAپ[ƒ€پALDپAƒsƒSƒbƒg“™
ƒsƒbƒ`
چإ‘ه‚ھ11پ‹‚ئ‚ف‚ب‚µ‚ؤ‚»‚ج”¼•ھپB
3ژ²ƒWƒƒƒCƒچ
ƒڈƒ“ƒMƒ“ƒO
335mmƒچپ[ƒ^پ[
ƒŒƒMƒ…ƒŒƒ^پAƒ‚پ[ƒ^پ[پAƒXƒLƒbƒhپA
ڈd—ت‚ھ‘‚¦‚ؤ‚é•ھ•‰’S‚ھ‘ه‚«‚¢‚إ‚·‚ج‚إپA
ƒzƒoƒٹƒ“ƒO‚إ‚ج‰^—p‚ج‹‰»‚ً‚µ‚ب‚¯‚ê‚خ‚إ‚·پB
AMP‚جڈؤ‘¹‘خچô
FANپAƒtƒBƒ“پAƒOƒٹپ[ƒX
‚à‚ ‚è‚ـ‚·‚ھپA
Œy‘•”ُ‚إƒJƒŒƒ“ƒgƒٹƒ~ƒbƒ^پ[‚ب‚ا‚ً•t‚¯پA
ڈ™پX‚ة•‰‰×‚ً‘‚₵پA
“d—¬‚ًٹؤژ‹‚µ‚ب‚ھ‚çŒّ—¦‚جچ‚‚¢ƒZƒbƒeƒBƒ“ƒO‚ً’T‚èڈo‚µ‚ؤ‚¢‚‚ئ—ا‚¢‚©‚ئژv‚¢‚ـ‚·پB
ƒZƒbƒeƒBƒ“ƒO‚ئ‚µ‚ؤ‚حپA
“d—¬‚ئƒgƒ‹ƒN‚ح”ن—ل‚إ‚·‚©‚çپA
ƒMƒ„”ن‚ًŒy‚¢•û‚ةگف’肵‚ـ‚·پB
چإ‘هƒsƒbƒ`‚ً’ل‚‚µ‚ـ‚·پB
‚»‚µ‚ؤپA
ƒXƒچƒbƒgƒ‹‚ة‚àگ§Œہ‚ً‰ء‚¦‚ê‚خ—ا‚¢‚©‚ئژv‚¢‚ـ‚·پB
12VFANپAƒtƒBƒ“پAƒOƒٹپ[ƒX
ƒڈƒCƒ„ƒŒƒXƒJƒپƒ‰‚ج•ھ‰ًپB
+[TVTX]+
090321
Œّ—¦‚ھ—ا‚¢‚ئŒ¾‚ي‚ê‚éScorpion‚جƒ‚پ[ƒ^پ[‚ة–ك‚µ‚ؤ‘ھ’è‚إ‚·پB
MotorپFWeight پF57پ¨79 Grams
HK-2221-3595KV- V2پ@پƒ8T
•‰’S‚ً”ً‚¯‚邽‚كپAƒMƒ„‚ح3mmژ²‚ة‚ح‚ـ‚éˆê”شڈ¬‚³‚ب11T‚إ‚·پB
“dˆ³•ھٹ„

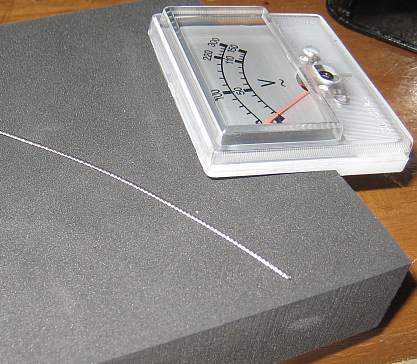
 1mƒ¶‚ًچى‚ء‚ؤ“d—¬’l‚ً‚ح‚©‚ê‚é‚و‚¤‚ة‚µ‚ـ‚µ‚½پB
1mƒ¶‚ًچى‚ء‚ؤ“d—¬’l‚ً‚ح‚©‚ê‚é‚و‚¤‚ة‚µ‚ـ‚µ‚½پB
 ‚ئ‚è‚ ‚¦‚¸•‚‚©‚¹‚ؤ‚ف‚ـ‚µ‚½پB
ƒsپ[ƒN’lپF17.1A
“d—¬‚ح18Aˆت‚حگH‚ء‚ؤ‚é‚و‚¤‚إ‚·پB
‚³‚ي‚é‚ئ”M‚¢‚إ‚·پB
’²گ®‚إƒAƒ‹’ِ“x‰؛‚°‚ç‚ê‚»‚¤‚إ‚·پB
‚ئ‚è‚ ‚¦‚¸•‚‚©‚¹‚ؤ‚ف‚ـ‚µ‚½پB
ƒsپ[ƒN’lپF17.1A
“d—¬‚ح18Aˆت‚حگH‚ء‚ؤ‚é‚و‚¤‚إ‚·پB
‚³‚ي‚é‚ئ”M‚¢‚إ‚·پB
’²گ®‚إƒAƒ‹’ِ“x‰؛‚°‚ç‚ê‚»‚¤‚إ‚·پB

.jpg) پƒ–¢’²گ®•sˆہ’è‚ب‚è•‚ڈم‚ب“®‰و‚إ‚·پB
ƒڈƒMƒ“ƒO(ƒnƒ“ƒ`ƒ“ƒO)‚ھŒ©‚ç‚ê‚ـ‚·پB
ƒWƒƒƒCƒچ‚جٹ´“x‚ھچ‚‚¢‚إ‚·پB
“®‰و
-----------------------------------------
پƒ–¢’²گ®•sˆہ’è‚ب‚è•‚ڈم‚ب“®‰و‚إ‚·پB
ƒڈƒMƒ“ƒO(ƒnƒ“ƒ`ƒ“ƒO)‚ھŒ©‚ç‚ê‚ـ‚·پB
ƒWƒƒƒCƒچ‚جٹ´“x‚ھچ‚‚¢‚إ‚·پB
“®‰و
-----------------------------------------
090323
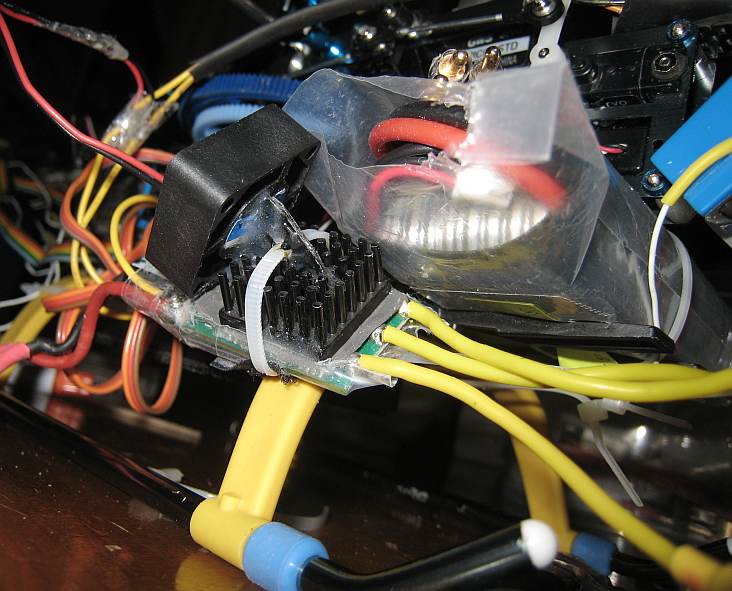
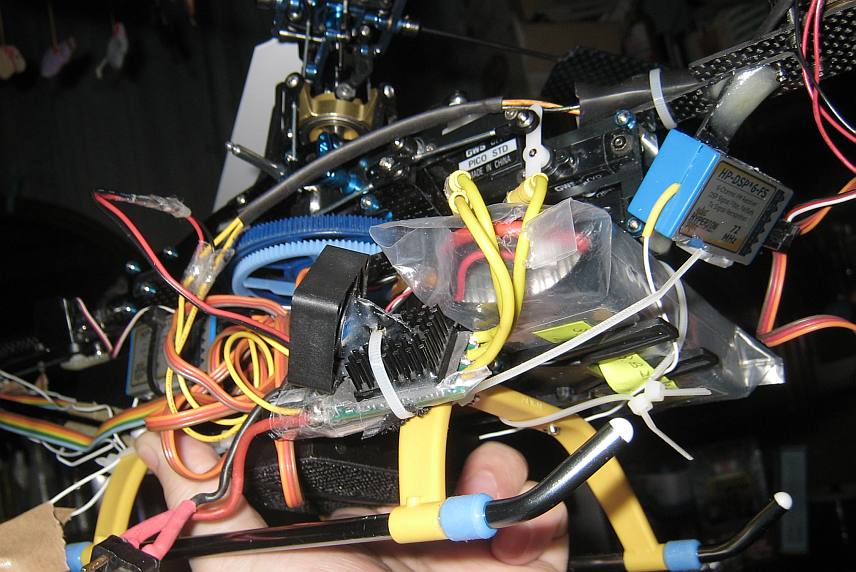
AMP(ESC)‚ج•ْ”MƒvƒŒپ[ƒg‚ة‘خ‚µ‚ؤFAN‚ًژخ‚ك‚ةژو‚è•t‚¯‚ـ‚µ‚½پB
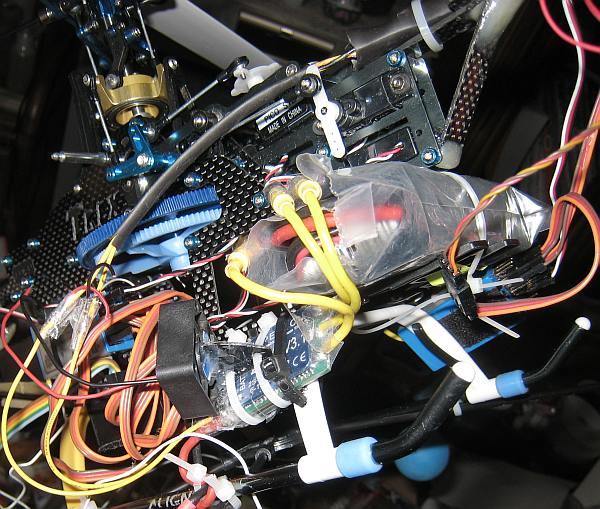

 پƒ985g
---------------------
ƒٹƒ“ƒPپ[ƒW‚ًگ³ٹm‚ب’·‚³‚ة’²گ®‚·‚邽‚كپA
پƒ985g
---------------------
ƒٹƒ“ƒPپ[ƒW‚ًگ³ٹm‚ب’·‚³‚ة’²گ®‚·‚邽‚كپA

 ---------------------
FAN‚ج—â‹pŒّ‰ت‚ح‘ه‚«‚©‚ء‚½‚إ‚·پB
‚³‚ي‚ê‚ب‚¢‚ظ‚ا‚جƒvƒŒپ[ƒg‚¾‚ء‚½‚ج‚إ‚·‚ھپA
’g‚©‚ف‚àٹ´‚¶‚ب‚¢‚ظ‚ا‚إ‚·پB
---------------------
FAN‚ج—â‹pŒّ‰ت‚ح‘ه‚«‚©‚ء‚½‚إ‚·پB
‚³‚ي‚ê‚ب‚¢‚ظ‚ا‚جƒvƒŒپ[ƒg‚¾‚ء‚½‚ج‚إ‚·‚ھپA
’g‚©‚ف‚àٹ´‚¶‚ب‚¢‚ظ‚ا‚إ‚·پB
 “d—¬‚حƒsپ[ƒN‚إ‚à19.2A‚إ‚µ‚½پB
3‚آ‚جƒgƒ‰ƒuƒ‹‚ھ‹N‚±‚è‚ـ‚µ‚½پB
‘O‚جƒXƒLƒbƒh‚àگـ‚ê‚ـ‚µ‚½پB
“d—¬‚حƒsپ[ƒN‚إ‚à19.2A‚إ‚µ‚½پB
3‚آ‚جƒgƒ‰ƒuƒ‹‚ھ‹N‚±‚è‚ـ‚µ‚½پB
‘O‚جƒXƒLƒbƒh‚àگـ‚ê‚ـ‚µ‚½پB
 ƒپƒCƒ“ƒ}ƒXƒg‚ًژ~‚ك‚ؤ‚½Œک‚¢گj‹à‚ھ™’’f‚³‚ê‚ؤگط‚ê‚ـ‚µ‚½پB
ƒ‚پ[ƒ^پ[‚ج‚ئ‚ٌ‚إ‚à‚ب‚¢ƒgƒ‹ƒN‚ھŒ´ˆِ‚ج‚و‚¤‚إ‚·پB
ƒپƒCƒ“ƒ}ƒXƒg‚ًژ~‚ك‚ؤ‚½Œک‚¢گj‹à‚ھ™’’f‚³‚ê‚ؤگط‚ê‚ـ‚µ‚½پB
ƒ‚پ[ƒ^پ[‚ج‚ئ‚ٌ‚إ‚à‚ب‚¢ƒgƒ‹ƒN‚ھŒ´ˆِ‚ج‚و‚¤‚إ‚·پB
 ƒGƒ‹ƒچƒ“‚ھ“®‚©‚ب‚¢——R‚حƒvƒچƒ|“à•”‚إ‚ج’fگü‚إ‚·پBپ@پƒ—v‘خچô+ٹO•”“ü—ح’[ژqپB
چl‚¦‚½Œ‹‰تپA
ƒXƒeƒ“ƒŒƒXƒڈƒCƒ„پ[ƒچپ[ƒv‚إپA
‰—ح‚à‰آ“®•”•ھ‚جڈW’†‚ة‚و‚éƒXƒgƒŒƒX‚àˆê”ش‘½‚¢‚ج‚ح”¼“c•t‚¯‚جچھ–{پ¨ƒSƒ€Œn“‚ئ‚©‚إڈ_‚ç‚©‚Œإ’èژxژ
ƒXƒgƒŒƒX‚جڈ‚ب‚¢‰ٌ“]ژ²‚©‚çƒPپ[ƒuƒ‹‚ًژو‚è‰ٌ‚·پBپB
‚ئپAŒ©‚ؤ‚ف‚é‚ئپA
پcگفŒvژ©‘ج‚ھ‚»‚¤‚ب‚ء‚ؤ‚ـ‚µ‚½
‹}‚¢‚إ‚½‚±‚ئ‚ًژv‚¢ڈo‚µ‚ـ‚·پB
ƒGƒ‹ƒچƒ“‚ھ“®‚©‚ب‚¢——R‚حƒvƒچƒ|“à•”‚إ‚ج’fگü‚إ‚·پBپ@پƒ—v‘خچô+ٹO•”“ü—ح’[ژqپB
چl‚¦‚½Œ‹‰تپA
ƒXƒeƒ“ƒŒƒXƒڈƒCƒ„پ[ƒچپ[ƒv‚إپA
‰—ح‚à‰آ“®•”•ھ‚جڈW’†‚ة‚و‚éƒXƒgƒŒƒX‚àˆê”ش‘½‚¢‚ج‚ح”¼“c•t‚¯‚جچھ–{پ¨ƒSƒ€Œn“‚ئ‚©‚إڈ_‚ç‚©‚Œإ’èژxژ
ƒXƒgƒŒƒX‚جڈ‚ب‚¢‰ٌ“]ژ²‚©‚çƒPپ[ƒuƒ‹‚ًژو‚è‰ٌ‚·پBپB
‚ئپAŒ©‚ؤ‚ف‚é‚ئپA
پcگفŒvژ©‘ج‚ھ‚»‚¤‚ب‚ء‚ؤ‚ـ‚µ‚½
‹}‚¢‚إ‚½‚±‚ئ‚ًژv‚¢ڈo‚µ‚ـ‚·پB
 ƒWƒƒƒCƒچ‚ج–hگU‚à•K—v‚»‚¤‚إ‚·پB
”‰Œ‹‚ر‚آ‚¯ƒXƒچƒbƒgƒ‹•‚ڈم
AMP‚جڈuٹش“d—¬‹–—e
ƒXƒ|ƒ“ƒWƒVƒ‡ƒbƒNƒAƒuƒ\پ[ƒoپ[+چإ’لƒsƒbƒ`‚ً0‚و‚èژلٹ±‘ه‚«‚‚·‚éپB
ƒXƒLƒbƒh‚جŒز‚ً•R‚إ‚آ‚ب‚°‚éپB
-------------
090327
‰E‚ح‰َ‚ꂽGWS‚ج‚إ‚·پB
ƒ‚پ[ƒ‹ƒfƒBƒ“ƒO‚³‚ê‚ؤ‚ؤ”M‚ج“`“±‚ھ—ا‚¢‚ج‚©”»‚ç‚ب‚¢‚إ‚·‚ج‚إ“à•”‚©‚ç‚ج”r”M‚ج‚µ‚â‚·‚³‚ح”»‚è‚ـ‚¹‚ٌپB
‚½‚¾پAƒsپ[ƒN‚ج“d—¬‚ح15•b‚ئ‚µ‚ؤچإ’ل30ƒpپ[ƒZƒ“ƒg‚حƒIپ[ƒoپ[‚إ‚«‚é‚ئژv‚¢‚ـ‚·پB
‚±‚ê‚ًƒIپ[ƒ‹ƒVپ[ƒYƒ“‚إ‚جژg—p‚ة“–‚ؤ‚ح‚ك‚ؤ‚ف‚é‚ئپA
”ي•‚جƒ`ƒ…پ[ƒu‚ً‚ح‚¬ژو‚ء‚ؤFin‚ئFan‚إ—â‹p‚µ‚ـ‚‚ê‚خکA‘±‚إ30Aˆتچs‚‚©‚à‚µ‚ê‚ـ‚¹‚ٌپB
”M“`“±ƒVپ[ƒg‚ح‹â‚ھ“ü‚ء‚ؤƒoƒbƒtƒ@پ[‚ة‚ب‚è‚»‚¤‚إ‚µ‚½‚ج‚إپAچؤ—ک—p‚ةژg‚¤‚إ‚·پB
GWS‚ج‚ح”¼“±‘ج‚جچ‚‚³‚ھ”÷–‚ةˆل‚¤ڈم‚ةƒvƒŒپ[ƒg‚à‘إ‚؟”²‚«‚جکc‚ف‚ھ‚ ‚ء‚ؤ‚»‚جڈم‚ة”–‚¢—¼–تƒeپ[ƒv‚ج‚ف‚إ‚µ‚ؤپA–§’…‚µ‚ؤ‚½‚ج‚©‚حƒAƒ„ƒVƒC‚إ‚·پB
ƒWƒƒƒCƒچ‚ج–hگU‚à•K—v‚»‚¤‚إ‚·پB
”‰Œ‹‚ر‚آ‚¯ƒXƒچƒbƒgƒ‹•‚ڈم
AMP‚جڈuٹش“d—¬‹–—e
ƒXƒ|ƒ“ƒWƒVƒ‡ƒbƒNƒAƒuƒ\پ[ƒoپ[+چإ’لƒsƒbƒ`‚ً0‚و‚èژلٹ±‘ه‚«‚‚·‚éپB
ƒXƒLƒbƒh‚جŒز‚ً•R‚إ‚آ‚ب‚°‚éپB
-------------
090327
‰E‚ح‰َ‚ꂽGWS‚ج‚إ‚·پB
ƒ‚پ[ƒ‹ƒfƒBƒ“ƒO‚³‚ê‚ؤ‚ؤ”M‚ج“`“±‚ھ—ا‚¢‚ج‚©”»‚ç‚ب‚¢‚إ‚·‚ج‚إ“à•”‚©‚ç‚ج”r”M‚ج‚µ‚â‚·‚³‚ح”»‚è‚ـ‚¹‚ٌپB
‚½‚¾پAƒsپ[ƒN‚ج“d—¬‚ح15•b‚ئ‚µ‚ؤچإ’ل30ƒpپ[ƒZƒ“ƒg‚حƒIپ[ƒoپ[‚إ‚«‚é‚ئژv‚¢‚ـ‚·پB
‚±‚ê‚ًƒIپ[ƒ‹ƒVپ[ƒYƒ“‚إ‚جژg—p‚ة“–‚ؤ‚ح‚ك‚ؤ‚ف‚é‚ئپA
”ي•‚جƒ`ƒ…پ[ƒu‚ً‚ح‚¬ژو‚ء‚ؤFin‚ئFan‚إ—â‹p‚µ‚ـ‚‚ê‚خکA‘±‚إ30Aˆتچs‚‚©‚à‚µ‚ê‚ـ‚¹‚ٌپB
”M“`“±ƒVپ[ƒg‚ح‹â‚ھ“ü‚ء‚ؤƒoƒbƒtƒ@پ[‚ة‚ب‚è‚»‚¤‚إ‚µ‚½‚ج‚إپAچؤ—ک—p‚ةژg‚¤‚إ‚·پB
GWS‚ج‚ح”¼“±‘ج‚جچ‚‚³‚ھ”÷–‚ةˆل‚¤ڈم‚ةƒvƒŒپ[ƒg‚à‘إ‚؟”²‚«‚جکc‚ف‚ھ‚ ‚ء‚ؤ‚»‚جڈم‚ة”–‚¢—¼–تƒeپ[ƒv‚ج‚ف‚إ‚µ‚ؤپA–§’…‚µ‚ؤ‚½‚ج‚©‚حƒAƒ„ƒVƒC‚إ‚·پB
 پƒGWS
پƒGWS
 پƒGWS
پƒGWS
 پ@پƒ
پ@پƒ
 پ@پƒڈd—ت
‹â‚ج”M“`“±—¦‚ح420W/mK‚إ‚·پB
‹â99.9ƒpپ[ƒZƒ“ƒg‚إ‚à9.5W/mK‚إ‚·‚ج‚إ
ƒOƒٹپ[ƒX‚ًگ·‚éƒRƒg‚ح‚©‚ب‚è‚ـ‚¸‚¢‚و‚¤‚إ‚·پB
ƒSƒ€ƒVپ[ƒg‚إ50W/mK‚ئ‚¢‚¤‚ج‚ح‚ ‚è‚ـ‚µ‚½پB
ƒOƒٹپ[ƒX‚ھ—¬“®گ«‚ًژ‚ء‚½چ‡‹àژ©‘ج‚جƒ‚ƒm‚ـ‚إپcپA
Œy—تگ«‚إ‚ح–³‚¢‚و‚èƒ}ƒV‚ب‰«“d‹C‚جƒNپ[ƒ‹ƒXƒ^ƒbƒt‚ئ‚©‚à‚ ‚è‚ـ‚·‚ھپcپB
ƒnƒCƒyƒٹƒIƒ“‚جESC‚ة‚آ‚¢‚ؤ’²‚ׂé‚ئپA
*‰·“x•غŒى: ƒ\ƒtƒgƒJƒbƒg@80C
کA‘±“d—¬ ‹@ژي‚ة‚و‚é10 •bٹشƒsپ[ƒN“d—¬ کA‘±+ 20%
کA‘±“d—¬‚ح
ژü•س‰·“xگغژپ25“x‚إپAESC‚ة•—‚ھ“–‚½‚ء‚ؤ‚¢‚éڈَ‘ش‚إ‚جƒŒپ[ƒg‚إ‚·پB
ژü•س‰·“x‚ھ35“xˆبڈم‚جڈêچ‡‚ة‚حکA‘±“d—¬’l‚ً10%‰؛‚°‚ؤ‚‚¾‚³‚¢پB
—â‹p‚ھˆ«‚¢ڈêچ‡‚ح‚³‚ç‚ة20%‰؛‚°‚ؤ‚‚¾‚³‚¢پB
‰·“x‚ھ’ل‚پA—â‹p‚ھ‚و‚¯‚ê‚خ20+20پ“پپ40ƒpپ[ƒZƒ“ƒg(15•b)ˆبڈم‚ج‹–—e‚ھڈo—ˆ‚»‚¤‚إ‚·پB
‚ئ‚¢‚¤‚±‚ئ‚إƒeƒXƒg‚إ‚·پB
ƒMƒ„پF11Tپ@پƒƒRƒŒ‚و‚è‘ه•‚ة‰؛‚°‚é‚ب‚ç‚خپAƒVƒƒƒtƒg‚جŒa‚ًڈ¬‚³‚‚·‚é•K—v‚ھ‚ ‚è‚ـ‚·پB
چإڈ‰‚حپAƒXƒچƒbƒgƒ‹‚ًچإ‘ه•t‹ك‚ـ‚إڈم‚°‚éچغ‚ة‚ي‚¸‚©‚ة‰ٌ“]‚ھ‰؛‚ھ‚ء‚ؤ—ˆ‚ؤ‚µ‚ـ‚ء‚½‚ج‚إپA
ˆہ‘S‚ج‚½‚كپA
ƒXƒچƒbƒgƒ‹‚ئƒsƒbƒ`‚جچإ‘ه’l‚ً‰؛‚°‚ؤپB
•”‰®‚ج‰·“x‚ح25“x•t‹ك‚إ‚·پB
ƒnƒCƒyƒٹƒIƒ“20A‚جESC‚ةƒtƒ‹ƒXƒچƒbƒgƒ‹‚إ24A‘ن‚ج“d—¬‚ً20•b‚ظ‚ا—¬‚µ‚½‚ئ‚«‚جژتگ^پBپBپ@پƒƒXƒCƒbƒ`ƒ“ƒO“dŒ¹‚جŒہٹE‹ں‹‹“d—¬’l‚إ‚·پB
پ@پƒڈd—ت
‹â‚ج”M“`“±—¦‚ح420W/mK‚إ‚·پB
‹â99.9ƒpپ[ƒZƒ“ƒg‚إ‚à9.5W/mK‚إ‚·‚ج‚إ
ƒOƒٹپ[ƒX‚ًگ·‚éƒRƒg‚ح‚©‚ب‚è‚ـ‚¸‚¢‚و‚¤‚إ‚·پB
ƒSƒ€ƒVپ[ƒg‚إ50W/mK‚ئ‚¢‚¤‚ج‚ح‚ ‚è‚ـ‚µ‚½پB
ƒOƒٹپ[ƒX‚ھ—¬“®گ«‚ًژ‚ء‚½چ‡‹àژ©‘ج‚جƒ‚ƒm‚ـ‚إپcپA
Œy—تگ«‚إ‚ح–³‚¢‚و‚èƒ}ƒV‚ب‰«“d‹C‚جƒNپ[ƒ‹ƒXƒ^ƒbƒt‚ئ‚©‚à‚ ‚è‚ـ‚·‚ھپcپB
ƒnƒCƒyƒٹƒIƒ“‚جESC‚ة‚آ‚¢‚ؤ’²‚ׂé‚ئپA
*‰·“x•غŒى: ƒ\ƒtƒgƒJƒbƒg@80C
کA‘±“d—¬ ‹@ژي‚ة‚و‚é10 •bٹشƒsپ[ƒN“d—¬ کA‘±+ 20%
کA‘±“d—¬‚ح
ژü•س‰·“xگغژپ25“x‚إپAESC‚ة•—‚ھ“–‚½‚ء‚ؤ‚¢‚éڈَ‘ش‚إ‚جƒŒپ[ƒg‚إ‚·پB
ژü•س‰·“x‚ھ35“xˆبڈم‚جڈêچ‡‚ة‚حکA‘±“d—¬’l‚ً10%‰؛‚°‚ؤ‚‚¾‚³‚¢پB
—â‹p‚ھˆ«‚¢ڈêچ‡‚ح‚³‚ç‚ة20%‰؛‚°‚ؤ‚‚¾‚³‚¢پB
‰·“x‚ھ’ل‚پA—â‹p‚ھ‚و‚¯‚ê‚خ20+20پ“پپ40ƒpپ[ƒZƒ“ƒg(15•b)ˆبڈم‚ج‹–—e‚ھڈo—ˆ‚»‚¤‚إ‚·پB
‚ئ‚¢‚¤‚±‚ئ‚إƒeƒXƒg‚إ‚·پB
ƒMƒ„پF11Tپ@پƒƒRƒŒ‚و‚è‘ه•‚ة‰؛‚°‚é‚ب‚ç‚خپAƒVƒƒƒtƒg‚جŒa‚ًڈ¬‚³‚‚·‚é•K—v‚ھ‚ ‚è‚ـ‚·پB
چإڈ‰‚حپAƒXƒچƒbƒgƒ‹‚ًچإ‘ه•t‹ك‚ـ‚إڈم‚°‚éچغ‚ة‚ي‚¸‚©‚ة‰ٌ“]‚ھ‰؛‚ھ‚ء‚ؤ—ˆ‚ؤ‚µ‚ـ‚ء‚½‚ج‚إپA
ˆہ‘S‚ج‚½‚كپA
ƒXƒچƒbƒgƒ‹‚ئƒsƒbƒ`‚جچإ‘ه’l‚ً‰؛‚°‚ؤپB
•”‰®‚ج‰·“x‚ح25“x•t‹ك‚إ‚·پB
ƒnƒCƒyƒٹƒIƒ“20A‚جESC‚ةƒtƒ‹ƒXƒچƒbƒgƒ‹‚إ24A‘ن‚ج“d—¬‚ً20•b‚ظ‚ا—¬‚µ‚½‚ئ‚«‚جژتگ^پBپBپ@پƒƒXƒCƒbƒ`ƒ“ƒO“dŒ¹‚جŒہٹE‹ں‹‹“d—¬’l‚إ‚·پB
 پ@پƒپ@پƒ“d—¬’´‰كڈَ‘شپF24.6[A]
”¼“±‘ج‚ج‘«‚ًگG‚ء‚ؤ‚ف‚ؤ‚à‚ظ‚ج‚©‚ة’g‚©‚¢‚©‚بپ[پH
‚ئ‚¢‚¤’ِ“x‚µ‚©ٹ´‚¶‚ـ‚¹‚ٌ‚إ‚µ‚½پB
پ@پƒپ@پƒ“d—¬’´‰كڈَ‘شپF24.6[A]
”¼“±‘ج‚ج‘«‚ًگG‚ء‚ؤ‚ف‚ؤ‚à‚ظ‚ج‚©‚ة’g‚©‚¢‚©‚بپ[پH
‚ئ‚¢‚¤’ِ“x‚µ‚©ٹ´‚¶‚ـ‚¹‚ٌ‚إ‚µ‚½پB
 090401
‚ئ‚è‚ ‚¦‚¸پA
GWS‚جAMP‚حŒجڈل‚µ‚ؤ‚¢‚ب‚¢ژ–‚ھ”»–¾‚¢‚½‚µ‚ـ‚µ‚½پB
پu‰½‚ç‚©‚جŒ´ˆِ‚إگف’胂پ[ƒh‚ة“ü‚ء‚ؤ‚µ‚ـ‚¢پA
پ@ƒZƒtƒeƒBپ[‚ھ“‚¢‚ؤ‚¢‚½‚ئژv‚¢‚ـ‚·پBپv
‚ئ‚¢‚¤‚±‚ئ‚ب‚ج‚إپA
پ@پc‚»‚ج‚و‚¤‚بƒRƒ}ƒ“ƒh‘€چى‚ً‘إ‚ء‚ؤ‚µ‚ـ‚ء‚½‚و‚¤‚إ‚·پB
‚ئ‚ح‚¢‚¦پA
–§’…‚جˆ«‚¢ƒvƒŒپ[ƒg‚إ‚ح•sˆہ‚إ‚·‚ج‚إ‰ü—ا‚µ‚و‚¤‚ئژv‚¢‚ـ‚·پB
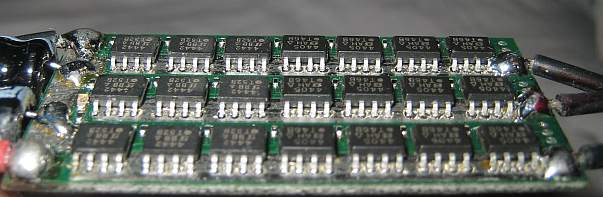
GWS‚جAMP‚جٹg‘هپB
090401
‚ئ‚è‚ ‚¦‚¸پA
GWS‚جAMP‚حŒجڈل‚µ‚ؤ‚¢‚ب‚¢ژ–‚ھ”»–¾‚¢‚½‚µ‚ـ‚µ‚½پB
پu‰½‚ç‚©‚جŒ´ˆِ‚إگف’胂پ[ƒh‚ة“ü‚ء‚ؤ‚µ‚ـ‚¢پA
پ@ƒZƒtƒeƒBپ[‚ھ“‚¢‚ؤ‚¢‚½‚ئژv‚¢‚ـ‚·پBپv
‚ئ‚¢‚¤‚±‚ئ‚ب‚ج‚إپA
پ@پc‚»‚ج‚و‚¤‚بƒRƒ}ƒ“ƒh‘€چى‚ً‘إ‚ء‚ؤ‚µ‚ـ‚ء‚½‚و‚¤‚إ‚·پB
‚ئ‚ح‚¢‚¦پA
–§’…‚جˆ«‚¢ƒvƒŒپ[ƒg‚إ‚ح•sˆہ‚إ‚·‚ج‚إ‰ü—ا‚µ‚و‚¤‚ئژv‚¢‚ـ‚·پB
GWS‚جAMP‚جٹg‘هپB
 پƒGWS
ƒnƒCƒyƒٹƒIƒ“‚جAMP‚جٹg‘هپB
پƒGWS
ƒnƒCƒyƒٹƒIƒ“‚جAMP‚جٹg‘هپB
 پƒHP
‘fژq‚ح‘أ“–‚ةچl‚¦‚ؤPWM—p‚جFETƒXƒCƒbƒ`‚¾‚ئ‚·‚é‚ئپA
–تژہ‘•ƒ^ƒCƒv‚إ‚±‚ٌ‚بƒ‚ƒm‚إ‚µ‚ه‚¤‚©پB
•ہ—ٌ‚ة‘‚₹‚خ‘ه“d—¬‚àOK
پƒHP
‘fژq‚ح‘أ“–‚ةچl‚¦‚ؤPWM—p‚جFETƒXƒCƒbƒ`‚¾‚ئ‚·‚é‚ئپA
–تژہ‘•ƒ^ƒCƒv‚إ‚±‚ٌ‚بƒ‚ƒm‚إ‚µ‚ه‚¤‚©پB
•ہ—ٌ‚ة‘‚₹‚خ‘ه“d—¬‚àOK
 پƒFET
GWS‚ج‚ة‚à•ْ”MƒtƒBƒ“‚ً•t‚¯‚ـ‚µ‚½پBپ@پƒچ،ŒمپA‰·“xƒ`ƒFƒbƒN‚µ‚½‚¢‚إ‚·پB
پƒFET
GWS‚ج‚ة‚à•ْ”MƒtƒBƒ“‚ً•t‚¯‚ـ‚µ‚½پBپ@پƒچ،ŒمپA‰·“xƒ`ƒFƒbƒN‚µ‚½‚¢‚إ‚·پB
 پ@پƒ
پ@پƒ
ƒfƒWƒ^ƒ‹•\ژ¦‚حŒƒ‚µ‚“®‚‚ئŒ©‚¦‚أ‚ç‚¢‚إ‚·پB
‚»‚±‚إ–ع•ھ—ت‚إ‚ف‚ê‚郉ƒWƒPپ[ƒ^پ[‚ة‚µ‚و‚¤‚ئژv‚¢‚ـ‚µ‚½پBپA
Œv‚肽‚¢‘خڈغ‚حپA
ˆت’uگ§Œن‚جƒLƒƒƒٹƒuƒŒپ[ƒVƒ‡ƒ“‚âپAƒwƒٹƒRƒvƒ^پ[‚جڈء”ï“d—¬’l‚إ‚·پBپƒ—ح—¦پH
چ¶‚حگ”’l‚ھ”ن—ل•\ژ¦‚إڈo‚ؤ‚é‚إ‚·‚ثپB
‰E‚حپA”ن—ل‚إ‚ح‚ب‚‘خگ”“I‚ب‚ج‚إ‚·‚ھپAگj‚ج‰“ڑ‘¬“x‚ھ‘¬‚¢ƒ^ƒCƒv‚إ‚·پB
 ƒvƒچƒ|‚âƒRƒ“ƒgƒچپ[ƒ‰پ[“à•”‚ج“®‚”zگü‚حپAچׂ¢ƒXƒeƒ“ƒŒƒXƒڈƒCƒ„پ[ƒچپ[ƒv‚ة”Mژûڈkƒ`ƒ…پ[ƒu‚ة‚µ‚½‚¢‚ئژv‚¢‚ـ‚·پB
”–AƒSƒ€‚ةŒٹ‚ًٹJ‚¯‚ؤƒXƒLƒbƒh‚ة—ڑ‚©‚¹‚و‚¤‚ئژv‚¢‚ـ‚·پB
ƒvƒچƒ|‚âƒRƒ“ƒgƒچپ[ƒ‰پ[“à•”‚ج“®‚”zگü‚حپAچׂ¢ƒXƒeƒ“ƒŒƒXƒڈƒCƒ„پ[ƒچپ[ƒv‚ة”Mژûڈkƒ`ƒ…پ[ƒu‚ة‚µ‚½‚¢‚ئژv‚¢‚ـ‚·پB
”–AƒSƒ€‚ةŒٹ‚ًٹJ‚¯‚ؤƒXƒLƒbƒh‚ة—ڑ‚©‚¹‚و‚¤‚ئژv‚¢‚ـ‚·پB
 ‚±‚ê‚حپAƒXƒLƒbƒh‚ة‚ز‚ء‚½‚è‚ب‚ج‚إ‰½‚©–ً‚ة‚½‚؟‚»‚¤‚ةژv‚¢چw“ü‚إ‚·پB
‚±‚ê‚حپAƒXƒLƒbƒh‚ة‚ز‚ء‚½‚è‚ب‚ج‚إ‰½‚©–ً‚ة‚½‚؟‚»‚¤‚ةژv‚¢چw“ü‚إ‚·پB

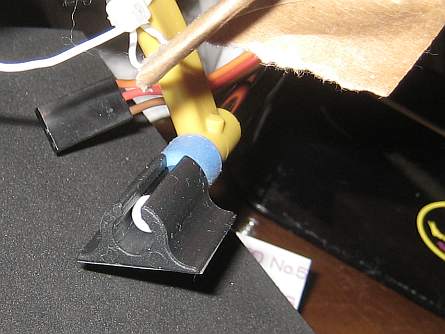 ƒXƒLƒbƒh‚ةƒVƒ‡ƒbƒN‹zژû—p‚جƒSƒ€‚جƒXƒ|ƒ“ƒW‚ً—ڑ‚©‚¹‚ؤ‚ف‚ـ‚µ‚½پB
ƒXƒLƒbƒh‚ةƒVƒ‡ƒbƒN‹zژû—p‚جƒSƒ€‚جƒXƒ|ƒ“ƒW‚ً—ڑ‚©‚¹‚ؤ‚ف‚ـ‚µ‚½پB
 ‚±‚جƒe‚ج‚«‚كچׂ©‚‚ء‚ؤپAŒy‚¢‘fچق‚ھ—ا‚¢‚ج‚إ‚·پA
‚±‚جƒe‚ج‚«‚كچׂ©‚‚ء‚ؤپAŒy‚¢‘fچق‚ھ—ا‚¢‚ج‚إ‚·پA




 پ@پƒ
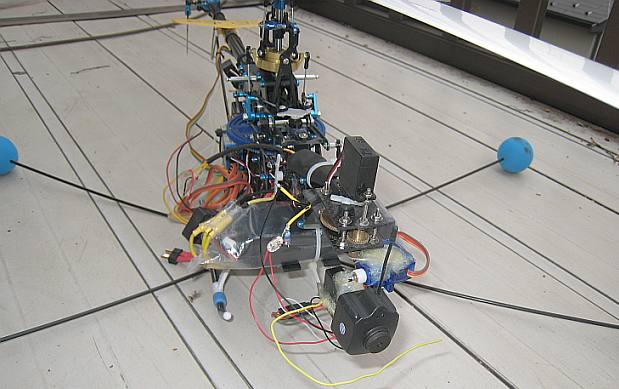
090422
•”‰®‚ج’†‚و‚èچL‚¢Œ؛ٹض‚إ‚ئ‚خ‚µ‚ـ‚µ‚½پB
‚±‚ج‚ئ‚«پAƒwƒٹ‚ح‚ا‚¤‚µ‚ؤ‚àچ¶‚ة‰ٌ“]‚µ‚ؤ‚µ‚ـ‚¤–â‘è‚ھڈo‚ـ‚µ‚½پBپƒ‰E‚¢‚ء‚د‚¢‚ة‘ا‚ًگط‚ء‚ؤ‚àژ~‚ـ‚é‚©پA‚ئ‚¢‚¤‚‚ç‚¢‚إ‚·پB
‚»‚ê‚ئگ…•½–ت‚جƒڈƒ“ƒMƒ“ƒO‚ئژv‚ي‚ê‚é‹““®‚ھŒ©‚ç‚ê‚ـ‚µ‚½پB
چL‚¢ڈêڈٹ‚ةˆع“®‚µ‚½‚ة‚à‚©‚©‚ي‚炸”ٌڈي‚ة‘€ڈc‚µ‚ة‚‚‚ؤ
‚»‚ê‚إ‚à‚â‚ء‚ؤ‚¢‚é‚ئƒ‰ƒ_پ[‚ھŒّ‚©‚ب‚‚ب‚ء‚ؤ‚µ‚ـ‚¢پA
Œ©‚ؤ‚ف‚é‚ئپAƒeپ[ƒ‹‚جƒxƒ‹ƒg‚ھ‚ن‚é‚ٌ‚إ‚ـ‚µ‚½‚ج‚إ–ك‚·‚ج‚إ‚·‚ھپA
‚±‚جˆêکA‚جŒ»ڈغ‚ھŒJ‚è•ش‚³‚ê‚邽‚كپA
‚±‚ꂾ‚¯ڈلٹQ‚ھ‘½‚¢‚ئ”»‚ç‚ب‚¢‚ج‚إپA
‚ـ‚¸3ژ²ƒWƒƒƒCƒچ‚جƒGƒ‰پ[‚©‚à‚µ‚ê‚ب‚¢‚ج‚إ
ٹ´“x‚ً—ژ‚ئ‚µ‚ؤ‚¢‚«‚·‚ׂؤƒ[ƒچ‚ة‚ب‚ء‚ؤ‚à•د‚ي‚è‚ب‚©‚ء‚½‚إ‚·پB
گ…•½–ت‚حƒ~ƒ\ƒXƒٹ‚ئژv‚ي‚ê‚ـ‚·‚ھپA
ƒeپ[ƒ‹‚ھ•s–¾‚إ‚·پB
”ٍچs’†‚جƒeپ[ƒ‹‚ج‘ا‚حچإ‘هŒہ‚ة“®‚¢‚ؤ‚é‚ج‚إ‚·‚ھپA
‚»‚±‚إپAژv‚ء‚½‚ج‚ھپAƒsƒbƒ`‚ھچ‚‚·‚¬‚é‚ج‚إ‚حپH
‚»‚ٌ‚ب‚ئ‚«پAچ¶‚ة‹ب‚ھ‚ء‚ؤ‘گ‚ق‚ç‚ة‚آ‚ء‚±‚فپA
ƒپƒCƒ“ƒچپ[ƒ^پ[‚ًژC‚ء‚ؤ‚µ‚ـ‚¢ƒپƒCƒ“ƒچپ[ƒ^پ[ƒOƒٹƒbƒv‚ھگـ‚ê‚ؤ‚µ‚ـ‚¢‚ـ‚µ‚½پB
چׂ¢چù‚إ‚·‚©‚çگـ‚ê‚é‚ئ‚حژv‚ي‚ب‚©‚ء‚½‚ج‚إ‚·‚ھپcپA
‰طڑّ‚ب–طگ»‚جƒپƒCƒ“ƒچپ[ƒ^پ[‚ھگـ‚ê‚ؤ‚ب‚¢‚ج‚ةƒOƒٹƒbƒv‚ھگـ‚ꂽ‚ج‚ة‚ح‚ر‚ء‚‚肵‚ـ‚µ‚½پB
چ\‘¢‹“x‚جŒ‡ٹׂإ‚ح‚ب‚ڈصŒ‚‚ة‚و‚éچقژ؟‚ھ—ا‚‚ب‚¢‚و‚¤‚ةژv‚¢‚ـ‚µ‚½پB
‚¤‚·‚¤‚·ٹ´‚¶‚ؤ‚½‚ج‚إƒٹƒ“ƒPپ[ƒW‚ج––’[‚ًŒ©‚ؤ‚ف‚é‚ئ‘€‘ا—ت‚ھڈم‚ة‚¸‚ê‚ؤ‚é‚ج‚ھ”»‚è‚ـ‚µ‚½پB
ƒsƒbƒ`ƒQپ[ƒW‚إٹm”F‚µ‚ؤ‚ف‚½Œ‹‰تپB
ƒzƒoƒٹƒ“ƒO‚جژ“_‚إ+12پ‹‚ة‚ب‚ء‚ؤ‚ـ‚µ‚½پB
ƒsƒbƒ`‚جƒvƒچƒtƒ@ƒCƒ‹‚حˆظڈي‚ب‚©‚ء‚½‚ج‚إپA
’²‚ׂؤ‚ف‚½‚ç0‚إ‚ ‚é‚ح‚¸‚جƒTƒuƒgƒٹƒ€‚ھ+29‚ئ‚ب‚ء‚ؤ‚¢‚ؤƒRƒŒ‚ھŒ´ˆِ‚إ‚µ‚½پB
ƒچپ[ƒ^پ[ƒOƒٹƒbƒv‚ًƒyƒ“ƒ`‚إٹ„‚ء‚ؤ‚ف‚½‚ج‚إ‚·‚ھپA
T-Rex‚جƒvƒ‰•”•i‚حپA
گئ‚‚ؤƒJƒ“ƒ^ƒ“‚ةƒNƒbƒLپ[‚ج‚و‚¤‚ةگـ‚ê‚ـ‚·پB
‹ڈ¤‚ج‚و‚¤‚ة”S‚ء‚ؤ‚‚ê‚ê‚خپcپA
‚ئ‚è‚ ‚¦‚¸پA
ƒچپ[ƒ^پ[ƒOƒٹƒbƒv‚ھ‚ ‚ـ‚è‚ة‚àژم‚¢‚ج‚إچ‚‰؟‚ب‹à‘®گ»‚ج‚ً’چ•¶‚µ‚ـ‚µ‚½پB
ژو‚è•t‚¯Œم‚ةƒsƒbƒ`‚ھ‚©‚ب‚èچ‚‚•د‰»‚µ‚½‚ج‚إپA
ƒٹƒ“ƒPپ[ƒW‚ً‚ج‚خ‚µ‚ـ‚µ‚½پB
چ،‰ٌ‚àƒgƒ‰ƒbƒLƒ“ƒO‚ج’²گ®‚ح•K—v‚ب‚©‚ء‚½‚إ‚·پB
335mmƒچپ[ƒ^پ[‚ئƒچƒ“ƒOƒeپ[ƒ‹‚ب‚çپA
”ٍچsژٹش‚ھڈم‚ھ‚é‚©‚àپB
‚إپA
325mm‚جƒJپ[ƒ{ƒ“ƒپƒCƒ“ƒچپ[ƒ^پ[‚ة•د‚¦‚ؤ•‚‚©‚¹‚ؤ‚ف‚é‚ئپA
‚â‚ح‚èپA
چ¶•ûŒü‚ة‰ٌ‚낤‚ئ‚µ‚ـ‚·پB
‘ا‚ح‰E•ûŒü‚ةŒہٹE‚ةگط‚ء‚ؤ‚ـ‚·پB
ƒٹƒ“ƒPپ[ƒW‚حƒTپ[ƒ{ƒzپ[ƒ“‚âƒAپ[ƒ€‚ئƒچƒbƒh‚ھƒZƒ“ƒ^پ[‚إ’¼ٹp‚ھƒxƒXƒg‚إ‚·‚ج‚إ‚»‚¤گف’肵‚ؤ‚ـ‚·‚ج‚إ
‰¹‚âƒTپ[ƒ{ƒzپ[ƒ“‚ج“®‚«‚©‚çƒsƒbƒ`‚àڈ\•ھ‚ة’ل‚¢‚إ‚·پB
‚±‚جŒ»ڈغ‚حƒeپ[ƒ‹‚جƒxƒ‹ƒg‚جٹٹ‚è‚ئ‚©‚إ‚ب‚¢Œہ‚è—‰ً‚إ‚«‚ـ‚¹‚ٌپB
‚¶‚ء‚‚茩‚邽‚كپAƒeƒŒƒr‚ج‰ٌ“]‘ن‚ةڈو‚¹‚ؤƒ`ƒFƒbƒN‚µ‚ؤ‚ف‚و‚¤‚ئژv‚¢‚ـ‚·پB
پ@پƒ
090422
•”‰®‚ج’†‚و‚èچL‚¢Œ؛ٹض‚إ‚ئ‚خ‚µ‚ـ‚µ‚½پB
‚±‚ج‚ئ‚«پAƒwƒٹ‚ح‚ا‚¤‚µ‚ؤ‚àچ¶‚ة‰ٌ“]‚µ‚ؤ‚µ‚ـ‚¤–â‘è‚ھڈo‚ـ‚µ‚½پBپƒ‰E‚¢‚ء‚د‚¢‚ة‘ا‚ًگط‚ء‚ؤ‚àژ~‚ـ‚é‚©پA‚ئ‚¢‚¤‚‚ç‚¢‚إ‚·پB
‚»‚ê‚ئگ…•½–ت‚جƒڈƒ“ƒMƒ“ƒO‚ئژv‚ي‚ê‚é‹““®‚ھŒ©‚ç‚ê‚ـ‚µ‚½پB
چL‚¢ڈêڈٹ‚ةˆع“®‚µ‚½‚ة‚à‚©‚©‚ي‚炸”ٌڈي‚ة‘€ڈc‚µ‚ة‚‚‚ؤ
‚»‚ê‚إ‚à‚â‚ء‚ؤ‚¢‚é‚ئƒ‰ƒ_پ[‚ھŒّ‚©‚ب‚‚ب‚ء‚ؤ‚µ‚ـ‚¢پA
Œ©‚ؤ‚ف‚é‚ئپAƒeپ[ƒ‹‚جƒxƒ‹ƒg‚ھ‚ن‚é‚ٌ‚إ‚ـ‚µ‚½‚ج‚إ–ك‚·‚ج‚إ‚·‚ھپA
‚±‚جˆêکA‚جŒ»ڈغ‚ھŒJ‚è•ش‚³‚ê‚邽‚كپA
‚±‚ꂾ‚¯ڈلٹQ‚ھ‘½‚¢‚ئ”»‚ç‚ب‚¢‚ج‚إپA
‚ـ‚¸3ژ²ƒWƒƒƒCƒچ‚جƒGƒ‰پ[‚©‚à‚µ‚ê‚ب‚¢‚ج‚إ
ٹ´“x‚ً—ژ‚ئ‚µ‚ؤ‚¢‚«‚·‚ׂؤƒ[ƒچ‚ة‚ب‚ء‚ؤ‚à•د‚ي‚è‚ب‚©‚ء‚½‚إ‚·پB
گ…•½–ت‚حƒ~ƒ\ƒXƒٹ‚ئژv‚ي‚ê‚ـ‚·‚ھپA
ƒeپ[ƒ‹‚ھ•s–¾‚إ‚·پB
”ٍچs’†‚جƒeپ[ƒ‹‚ج‘ا‚حچإ‘هŒہ‚ة“®‚¢‚ؤ‚é‚ج‚إ‚·‚ھپA
‚»‚±‚إپAژv‚ء‚½‚ج‚ھپAƒsƒbƒ`‚ھچ‚‚·‚¬‚é‚ج‚إ‚حپH
‚»‚ٌ‚ب‚ئ‚«پAچ¶‚ة‹ب‚ھ‚ء‚ؤ‘گ‚ق‚ç‚ة‚آ‚ء‚±‚فپA
ƒپƒCƒ“ƒچپ[ƒ^پ[‚ًژC‚ء‚ؤ‚µ‚ـ‚¢ƒپƒCƒ“ƒچپ[ƒ^پ[ƒOƒٹƒbƒv‚ھگـ‚ê‚ؤ‚µ‚ـ‚¢‚ـ‚µ‚½پB
چׂ¢چù‚إ‚·‚©‚çگـ‚ê‚é‚ئ‚حژv‚ي‚ب‚©‚ء‚½‚ج‚إ‚·‚ھپcپA
‰طڑّ‚ب–طگ»‚جƒپƒCƒ“ƒچپ[ƒ^پ[‚ھگـ‚ê‚ؤ‚ب‚¢‚ج‚ةƒOƒٹƒbƒv‚ھگـ‚ꂽ‚ج‚ة‚ح‚ر‚ء‚‚肵‚ـ‚µ‚½پB
چ\‘¢‹“x‚جŒ‡ٹׂإ‚ح‚ب‚ڈصŒ‚‚ة‚و‚éچقژ؟‚ھ—ا‚‚ب‚¢‚و‚¤‚ةژv‚¢‚ـ‚µ‚½پB
‚¤‚·‚¤‚·ٹ´‚¶‚ؤ‚½‚ج‚إƒٹƒ“ƒPپ[ƒW‚ج––’[‚ًŒ©‚ؤ‚ف‚é‚ئ‘€‘ا—ت‚ھڈم‚ة‚¸‚ê‚ؤ‚é‚ج‚ھ”»‚è‚ـ‚µ‚½پB
ƒsƒbƒ`ƒQپ[ƒW‚إٹm”F‚µ‚ؤ‚ف‚½Œ‹‰تپB
ƒzƒoƒٹƒ“ƒO‚جژ“_‚إ+12پ‹‚ة‚ب‚ء‚ؤ‚ـ‚µ‚½پB
ƒsƒbƒ`‚جƒvƒچƒtƒ@ƒCƒ‹‚حˆظڈي‚ب‚©‚ء‚½‚ج‚إپA
’²‚ׂؤ‚ف‚½‚ç0‚إ‚ ‚é‚ح‚¸‚جƒTƒuƒgƒٹƒ€‚ھ+29‚ئ‚ب‚ء‚ؤ‚¢‚ؤƒRƒŒ‚ھŒ´ˆِ‚إ‚µ‚½پB
ƒچپ[ƒ^پ[ƒOƒٹƒbƒv‚ًƒyƒ“ƒ`‚إٹ„‚ء‚ؤ‚ف‚½‚ج‚إ‚·‚ھپA
T-Rex‚جƒvƒ‰•”•i‚حپA
گئ‚‚ؤƒJƒ“ƒ^ƒ“‚ةƒNƒbƒLپ[‚ج‚و‚¤‚ةگـ‚ê‚ـ‚·پB
‹ڈ¤‚ج‚و‚¤‚ة”S‚ء‚ؤ‚‚ê‚ê‚خپcپA
‚ئ‚è‚ ‚¦‚¸پA
ƒچپ[ƒ^پ[ƒOƒٹƒbƒv‚ھ‚ ‚ـ‚è‚ة‚àژم‚¢‚ج‚إچ‚‰؟‚ب‹à‘®گ»‚ج‚ً’چ•¶‚µ‚ـ‚µ‚½پB
ژو‚è•t‚¯Œم‚ةƒsƒbƒ`‚ھ‚©‚ب‚èچ‚‚•د‰»‚µ‚½‚ج‚إپA
ƒٹƒ“ƒPپ[ƒW‚ً‚ج‚خ‚µ‚ـ‚µ‚½پB
چ،‰ٌ‚àƒgƒ‰ƒbƒLƒ“ƒO‚ج’²گ®‚ح•K—v‚ب‚©‚ء‚½‚إ‚·پB
335mmƒچپ[ƒ^پ[‚ئƒچƒ“ƒOƒeپ[ƒ‹‚ب‚çپA
”ٍچsژٹش‚ھڈم‚ھ‚é‚©‚àپB
‚إپA
325mm‚جƒJپ[ƒ{ƒ“ƒپƒCƒ“ƒچپ[ƒ^پ[‚ة•د‚¦‚ؤ•‚‚©‚¹‚ؤ‚ف‚é‚ئپA
‚â‚ح‚èپA
چ¶•ûŒü‚ة‰ٌ‚낤‚ئ‚µ‚ـ‚·پB
‘ا‚ح‰E•ûŒü‚ةŒہٹE‚ةگط‚ء‚ؤ‚ـ‚·پB
ƒٹƒ“ƒPپ[ƒW‚حƒTپ[ƒ{ƒzپ[ƒ“‚âƒAپ[ƒ€‚ئƒچƒbƒh‚ھƒZƒ“ƒ^پ[‚إ’¼ٹp‚ھƒxƒXƒg‚إ‚·‚ج‚إ‚»‚¤گف’肵‚ؤ‚ـ‚·‚ج‚إ
‰¹‚âƒTپ[ƒ{ƒzپ[ƒ“‚ج“®‚«‚©‚çƒsƒbƒ`‚àڈ\•ھ‚ة’ل‚¢‚إ‚·پB
‚±‚جŒ»ڈغ‚حƒeپ[ƒ‹‚جƒxƒ‹ƒg‚جٹٹ‚è‚ئ‚©‚إ‚ب‚¢Œہ‚è—‰ً‚إ‚«‚ـ‚¹‚ٌپB
‚¶‚ء‚‚茩‚邽‚كپAƒeƒŒƒr‚ج‰ٌ“]‘ن‚ةڈو‚¹‚ؤƒ`ƒFƒbƒN‚µ‚ؤ‚ف‚و‚¤‚ئژv‚¢‚ـ‚·پB
 چl‚¦‚ؤ‚ف‚½‚ج‚إ‚·‚ھپA
‚±‚جŒ»ڈغ‚ھژn‚ـ‚ء‚½‚ج‚حپA
ˆہ’艻“dŒ¹‚©‚çƒoƒbƒeƒٹپ[‚جژg—p‚ةگط‚è‘ض‚¦‚½‚ئ‚«‚©‚ç‚إ‚·پB
AMP‚ھ’Zژٹش‚إ‚à‚ت‚‚à‚è‚ً‚à‚ء‚ؤ‚ـ‚µ‚½‚ج‚إپA
‚¨‚»‚ç‚پA
ƒچپ[ƒ^پ[‚جچR—ح‚ھ‹‚·‚¬‚é‚و‚¤‚إ‚·پB
چ،‰ٌ‚ح‰ٌ“]‚ھ‘¬‚·‚¬‚é‚و‚¤‚إ‚·پB
ƒKƒoƒiپ[ƒ‚پ[ƒh‚ھƒCƒC‚©‚àپB
ƒچƒ“ƒOƒeپ[ƒ‹‚à•K—v‚©‚àپH
‚±‚جƒJپ[ƒ{ƒ“ƒچپ[ƒ^پ[‚ح‘S‘ج‚ھFRP‚إ‚ح‚ب‚¢‚و‚¤‚إ‚·پB
چl‚¦‚ؤ‚ف‚½‚ج‚إ‚·‚ھپA
‚±‚جŒ»ڈغ‚ھژn‚ـ‚ء‚½‚ج‚حپA
ˆہ’艻“dŒ¹‚©‚çƒoƒbƒeƒٹپ[‚جژg—p‚ةگط‚è‘ض‚¦‚½‚ئ‚«‚©‚ç‚إ‚·پB
AMP‚ھ’Zژٹش‚إ‚à‚ت‚‚à‚è‚ً‚à‚ء‚ؤ‚ـ‚µ‚½‚ج‚إپA
‚¨‚»‚ç‚پA
ƒچپ[ƒ^پ[‚جچR—ح‚ھ‹‚·‚¬‚é‚و‚¤‚إ‚·پB
چ،‰ٌ‚ح‰ٌ“]‚ھ‘¬‚·‚¬‚é‚و‚¤‚إ‚·پB
ƒKƒoƒiپ[ƒ‚پ[ƒh‚ھƒCƒC‚©‚àپB
ƒچƒ“ƒOƒeپ[ƒ‹‚à•K—v‚©‚àپH
‚±‚جƒJپ[ƒ{ƒ“ƒچپ[ƒ^پ[‚ح‘S‘ج‚ھFRP‚إ‚ح‚ب‚¢‚و‚¤‚إ‚·پB
 ƒچپ[ƒ^پ[‚جژ©ڈd‚حŒy‚پAٹ´گ«ƒ‚پ[ƒپƒ“ƒg‚ح‘ه‚«‚‚·‚é‚ج‚ھ—ا‚¢‚ج‚إ‚·‚ھپA
ƒRƒXƒgƒpƒtƒHپ[ƒ}ƒ“ƒX‚إ‚حƒOƒ‰ƒXFRP‚ھ“Kگط‚©‚àپB
’چ•¶
ƒچپ[ƒ^پ[‚جژ©ڈd‚حŒy‚پAٹ´گ«ƒ‚پ[ƒپƒ“ƒg‚ح‘ه‚«‚‚·‚é‚ج‚ھ—ا‚¢‚ج‚إ‚·‚ھپA
ƒRƒXƒgƒpƒtƒHپ[ƒ}ƒ“ƒX‚إ‚حƒOƒ‰ƒXFRP‚ھ“Kگط‚©‚àپB
’چ•¶
 پƒپ@
پƒپ@ ˆؤٹOƒVƒ“ƒvƒ‹‚إ‚·‚µپA
3ژ²ƒWƒƒƒCƒچ‚àگ¶‚«‚ـ‚·‚µپAڈd‚‚ب‚ء‚½‹@‘ج‚ة‚ح—ا‚¢‚ئ‚حژv‚¢‚ـ‚·پB
”ٍچsژٹش‚حUP‚·‚é‚©‚àپH
ˆؤٹOƒVƒ“ƒvƒ‹‚إ‚·‚µپA
3ژ²ƒWƒƒƒCƒچ‚àگ¶‚«‚ـ‚·‚µپAڈd‚‚ب‚ء‚½‹@‘ج‚ة‚ح—ا‚¢‚ئ‚حژv‚¢‚ـ‚·پB
”ٍچsژٹش‚حUP‚·‚é‚©‚àپH
 http://www.rc-airstage.com/
چ¶‰ٌ‚è‚جƒNƒZ‚ھ–³‚‚ب‚è‚ـ‚µ‚½پB
http://www.rc-airstage.com/
چ¶‰ٌ‚è‚جƒNƒZ‚ھ–³‚‚ب‚è‚ـ‚µ‚½پB
 پ@پƒ
پ@پƒ
 پ@پƒƒ‰ƒ_پ[‚جٹ´“x
ٹî–{“I‚ةƒپƒCƒ“ƒچپ[ƒ^پ[‚ج‰ٌ“]گ”‚ھڈم‚ھ‚ê‚خƒeپ[ƒ‹‚ج‰ٌ“]گ”‚àڈم‚ھ‚è‚ـ‚·‚ج‚إ
ƒ‰ƒ_پ[‚ج—جˆو‚ھƒZƒ“ƒ^پ[‚إ‚ ‚ê‚خ‚ئ‚ؤ‚à—ا‚¢‚ج‚إ‚·‚ھپA
‚·‚ھپA
ƒzƒoƒٹƒ“ƒOˆہ’èگ«ڈdژ‹‚ئ‚ب‚é‚ئپAŒّ—¦‚جƒoƒ‰ƒ“ƒX‚إژلٹ±ƒsƒbƒ`‚ًچ‚‚‚ئ‚ء‚ؤ‚à–³“ï‚إ‚·‚ھپA
Œّ—¦‚â‘€ڈcگ«‚╉’SŒyŒ¸‚ب‚اچX‚ةƒsƒbƒ`‚ًڈم‚°‚ث‚خ‚ب‚ç‚ب‚©‚ء‚½‚èپA
ƒuƒŒپ[ƒh‚ج‰„’·پAƒXƒPپ[ƒ‹—p‚جƒچپ[ƒ^پ[–‡گ”UP‚ب‚ا‚ئ‚ب‚é‚ئپA
ƒ‰ƒ_پ[‚جƒZƒ“ƒ^پ[‚ھ‚¸‚ê‚ـ‚·‚ج‚إƒeپ[ƒ‹ƒuپ[ƒ€‚ً’·‚‚µ‚½‚èپA
ƒeƒCƒ‹‚جƒuƒŒپ[ƒh‚ج–‡گ”‚ًڈم‚°‚½‚è
ƒMƒ„”ن‚ًڈم‚°‚½‚èƒeپ[ƒ‹‚ًƒJƒ`ڈم‚°‚ؤƒuƒŒپ[ƒh‚ج‰„’·‚ً‚µ‚½‚è‚حڈo—ˆ‚»‚¤‚إ‚·پB
ٹî–{“I‚ة‚ح‰„’·‚ھ–³“ï‚إ‚·‚ھپA
ƒxƒxƒ‹ƒMƒ„‚ئƒVƒƒƒtƒgƒhƒ‰ƒCƒu‚¾‚ئƒ‰ƒN‚إ‚·‚ثپB
Œ»چفپA
گ…•½‚جˆغژ‚ھ—ژ‚؟’…‚©‚ب‚¢ڈَ‘ش‚إ‚·پB
‘¼‚جژ²‚جٹ´“x‚âپAƒfƒ…ƒAƒ‹ƒŒپ[ƒgپAEXP‚ج’²گ®‚إ‚³‚ç‚ة
--------------------------------------
090402
’nژ¥‹CƒZƒ“ƒTپ[پ{‰ء‘¬“xƒZƒ“ƒTپ[‚جƒ‚ƒWƒ…پ[ƒ‹‚جƒeƒXƒgپB
ٹp“x‚جŒںڈo‚حŒ‹چ\گ³ٹm‚إ‚·پB
پ@پƒƒ‰ƒ_پ[‚جٹ´“x
ٹî–{“I‚ةƒپƒCƒ“ƒچپ[ƒ^پ[‚ج‰ٌ“]گ”‚ھڈم‚ھ‚ê‚خƒeپ[ƒ‹‚ج‰ٌ“]گ”‚àڈم‚ھ‚è‚ـ‚·‚ج‚إ
ƒ‰ƒ_پ[‚ج—جˆو‚ھƒZƒ“ƒ^پ[‚إ‚ ‚ê‚خ‚ئ‚ؤ‚à—ا‚¢‚ج‚إ‚·‚ھپA
‚·‚ھپA
ƒzƒoƒٹƒ“ƒOˆہ’èگ«ڈdژ‹‚ئ‚ب‚é‚ئپAŒّ—¦‚جƒoƒ‰ƒ“ƒX‚إژلٹ±ƒsƒbƒ`‚ًچ‚‚‚ئ‚ء‚ؤ‚à–³“ï‚إ‚·‚ھپA
Œّ—¦‚â‘€ڈcگ«‚╉’SŒyŒ¸‚ب‚اچX‚ةƒsƒbƒ`‚ًڈم‚°‚ث‚خ‚ب‚ç‚ب‚©‚ء‚½‚èپA
ƒuƒŒپ[ƒh‚ج‰„’·پAƒXƒPپ[ƒ‹—p‚جƒچپ[ƒ^پ[–‡گ”UP‚ب‚ا‚ئ‚ب‚é‚ئپA
ƒ‰ƒ_پ[‚جƒZƒ“ƒ^پ[‚ھ‚¸‚ê‚ـ‚·‚ج‚إƒeپ[ƒ‹ƒuپ[ƒ€‚ً’·‚‚µ‚½‚èپA
ƒeƒCƒ‹‚جƒuƒŒپ[ƒh‚ج–‡گ”‚ًڈم‚°‚½‚è
ƒMƒ„”ن‚ًڈم‚°‚½‚èƒeپ[ƒ‹‚ًƒJƒ`ڈم‚°‚ؤƒuƒŒپ[ƒh‚ج‰„’·‚ً‚µ‚½‚è‚حڈo—ˆ‚»‚¤‚إ‚·پB
ٹî–{“I‚ة‚ح‰„’·‚ھ–³“ï‚إ‚·‚ھپA
ƒxƒxƒ‹ƒMƒ„‚ئƒVƒƒƒtƒgƒhƒ‰ƒCƒu‚¾‚ئƒ‰ƒN‚إ‚·‚ثپB
Œ»چفپA
گ…•½‚جˆغژ‚ھ—ژ‚؟’…‚©‚ب‚¢ڈَ‘ش‚إ‚·پB
‘¼‚جژ²‚جٹ´“x‚âپAƒfƒ…ƒAƒ‹ƒŒپ[ƒgپAEXP‚ج’²گ®‚إ‚³‚ç‚ة
--------------------------------------
090402
’nژ¥‹CƒZƒ“ƒTپ[پ{‰ء‘¬“xƒZƒ“ƒTپ[‚جƒ‚ƒWƒ…پ[ƒ‹‚جƒeƒXƒgپB
ٹp“x‚جŒںڈo‚حŒ‹چ\گ³ٹm‚إ‚·پB
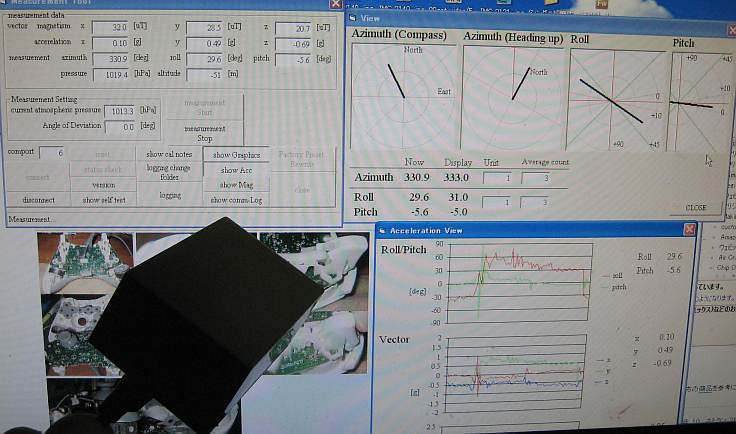 پ«‚ح‰ء‘¬“xƒZƒ“ƒTپ[‚ئژv‚ي‚ê‚ـ‚·پB
پ«‚ح‰ء‘¬“xƒZƒ“ƒTپ[‚ئژv‚ي‚ê‚ـ‚·پB
 ƒRƒ“ƒpƒNƒgگ«
‰ء‘¬“xƒZƒ“ƒTپ[‚حژٌ‚ً‚©‚µ‚°‚éچsˆ×‚ً‚ا‚¤‚·‚é‚©‚إ‹t•دٹ·‚ج“ïˆص“x‚ھ‚©‚ي‚è‚ـ‚·پB
‚ـ‚½پAڈd—ح‰ء‘¬“x‚ً9.8m/Sec^2‚ئ‚µ‚ؤ“ھ‚ج‰ء‘¬‰^“®‚ًژو‚é‚ج‚ھژہچغ‚ا‚ꂾ‚¯‰آ”\‚©پH‚ئ‚¢‚¤پB
ƒwƒbƒhƒgƒ‰ƒbƒLƒ“ƒO‚ج
•ہگi‰^“®‚جڈ‚ب‚¢Œم“ھ•”‚جژٌچھ‚ء‚±‚ھ—ا‚¢‚ج‚إ‚·‚ھپA
•ûŒü‚ح•ûˆتٹp‚حچœ”ص‚ئ‚جٹp“x‚ئ‚·‚é‚ئپA
—§‚ء‚ؤژg‚¤‚ب‚çƒAƒS‚ةƒZƒ“ƒTپ[‚ً•t‚¯‚ؤ‚àپH
ƒvƒچƒyƒ‰ƒVƒƒƒtƒg‚ئ‚¢‚¤‚©ƒtƒŒƒLƒVƒuƒ‹ƒWƒ‡ƒCƒ“ƒg‚ف‚½‚¢‚بƒٹƒWƒbƒg‚بƒٹƒ“ƒN‚إڈ\•ھ‚ج‚و‚¤‚ب‹C‚à‚µ‚ـ‚·پB
ƒپƒCƒ“ƒچپ[ƒ^پ[‚ج–‡گ”‚ًڈم‚°‚éڈêچ‡پA
ƒeپ[ƒ‹ƒuپ[ƒ€‰„’·‚جڈêچ‡ƒxƒxƒ‹ƒMƒ„‚ة‚·‚é•K—vگ«‚ھپcپA
‚»‚êˆبٹO‚إ‚حپAƒeپ[ƒ‹ƒچپ[ƒ^پ[‚ج–‡گ”UP‚إ‚·پB
ƒRƒ“ƒpƒNƒgگ«
‰ء‘¬“xƒZƒ“ƒTپ[‚حژٌ‚ً‚©‚µ‚°‚éچsˆ×‚ً‚ا‚¤‚·‚é‚©‚إ‹t•دٹ·‚ج“ïˆص“x‚ھ‚©‚ي‚è‚ـ‚·پB
‚ـ‚½پAڈd—ح‰ء‘¬“x‚ً9.8m/Sec^2‚ئ‚µ‚ؤ“ھ‚ج‰ء‘¬‰^“®‚ًژو‚é‚ج‚ھژہچغ‚ا‚ꂾ‚¯‰آ”\‚©پH‚ئ‚¢‚¤پB
ƒwƒbƒhƒgƒ‰ƒbƒLƒ“ƒO‚ج
•ہگi‰^“®‚جڈ‚ب‚¢Œم“ھ•”‚جژٌچھ‚ء‚±‚ھ—ا‚¢‚ج‚إ‚·‚ھپA
•ûŒü‚ح•ûˆتٹp‚حچœ”ص‚ئ‚جٹp“x‚ئ‚·‚é‚ئپA
—§‚ء‚ؤژg‚¤‚ب‚çƒAƒS‚ةƒZƒ“ƒTپ[‚ً•t‚¯‚ؤ‚àپH
ƒvƒچƒyƒ‰ƒVƒƒƒtƒg‚ئ‚¢‚¤‚©ƒtƒŒƒLƒVƒuƒ‹ƒWƒ‡ƒCƒ“ƒg‚ف‚½‚¢‚بƒٹƒWƒbƒg‚بƒٹƒ“ƒN‚إڈ\•ھ‚ج‚و‚¤‚ب‹C‚à‚µ‚ـ‚·پB
ƒپƒCƒ“ƒچپ[ƒ^پ[‚ج–‡گ”‚ًڈم‚°‚éڈêچ‡پA
ƒeپ[ƒ‹ƒuپ[ƒ€‰„’·‚جڈêچ‡ƒxƒxƒ‹ƒMƒ„‚ة‚·‚é•K—vگ«‚ھپcپA
‚»‚êˆبٹO‚إ‚حپAƒeپ[ƒ‹ƒچپ[ƒ^پ[‚ج–‡گ”UP‚إ‚·پB
 پEچ‚گ«”\ƒwƒbƒhƒچƒbƒNƒWƒƒƒCƒچ‚ئ‚ج’¼—ٌ‰»‚حپH
‚±‚ê‚حƒŒپ[ƒVƒ“ƒOƒRƒlƒNƒ^‚ةŒّ‚¢‚½‚إ‚·پB
’ïچR‚ً‰؛‚°‚é‚ئŒ¾‚¤‚و‚èپA‚ح‚ك‚é‚ئ‚«‚ج’ïچRٹ´‚ھŒƒŒ¸‚µ‚ـ‚µ‚½پB
‚±‚ꂾ‚¯‚إگع“_‚ض‚ج•‰’S‚ھŒ¸‚é‚إ‚·پB
ƒRƒlƒNƒ^‚ة‚و‚ء‚ؤ‚حپA‰ءچHگ¸“x‚ھˆ«‚¢ڈم‚ةگع“_‚جƒپƒbƒL‚ھ”–‚¢‚إ‚·‚ج‚إ‚»‚ٌ‚بڈêچ‡‚ة‚à—LŒّ‚©‚ئژv‚¢‚ـ‚·پB
’A‚µپA“x‚ً‰ك‚¬‚½‹ةˆ³گ«‚جچ‚‚¢گع“_‚ة‚حŒّ‰ت‚ھ”–‚¢ˆَڈغ‚إ‚·پB
پEچ‚گ«”\ƒwƒbƒhƒچƒbƒNƒWƒƒƒCƒچ‚ئ‚ج’¼—ٌ‰»‚حپH
‚±‚ê‚حƒŒپ[ƒVƒ“ƒOƒRƒlƒNƒ^‚ةŒّ‚¢‚½‚إ‚·پB
’ïچR‚ً‰؛‚°‚é‚ئŒ¾‚¤‚و‚èپA‚ح‚ك‚é‚ئ‚«‚ج’ïچRٹ´‚ھŒƒŒ¸‚µ‚ـ‚µ‚½پB
‚±‚ꂾ‚¯‚إگع“_‚ض‚ج•‰’S‚ھŒ¸‚é‚إ‚·پB
ƒRƒlƒNƒ^‚ة‚و‚ء‚ؤ‚حپA‰ءچHگ¸“x‚ھˆ«‚¢ڈم‚ةگع“_‚جƒپƒbƒL‚ھ”–‚¢‚إ‚·‚ج‚إ‚»‚ٌ‚بڈêچ‡‚ة‚à—LŒّ‚©‚ئژv‚¢‚ـ‚·پB
’A‚µپA“x‚ً‰ك‚¬‚½‹ةˆ³گ«‚جچ‚‚¢گع“_‚ة‚حŒّ‰ت‚ھ”–‚¢ˆَڈغ‚إ‚·پB
 Œ»چف‚ج–â‘è‚حپA
ƒپƒCƒ“ƒچپ[ƒ^پ[‚ھƒJƒپƒ‰‹ى“®ƒ†ƒjƒbƒg‚ً’@‚«‰َ‚·‚ئ‚¢‚¤ٹ댯گ«‚إ‚·پB
‚±‚ê‚حپAƒچپ[ƒ^پ[‚ھƒeپ[ƒ‹ƒuپ[ƒ€‚ً’@‚ژ–Œج‚ئ“¯‚¶‚إ
ƒچپ[ƒ^پ[ƒOƒٹƒbƒv‚ھ’ح‚ٌ‚إ‚¢‚é•”•ھ‚إƒچپ[ƒ^پ[‚ج‰ٌ“]•ûŒü‚ةƒچپ[ƒ^پ[‚ج‰آ“®ˆو‚ةگ§Œہ‚ًگف‚¯‚ؤ‚¢‚ب‚¢‚±‚ئ‚ئپA
‚»‚جڈمچX‚ةپA
ƒXƒ^ƒrƒ‰ƒCƒUپ[‚جƒVپ[ƒ\پ[‚ھŒX‚¢‚ؤƒچپ[ƒ^پ[‚ھڈص“ث‚·‚é‚ج‚ھŒ´ˆِ‚إ‚·پB
Œ»چف‚ج–â‘è‚حپA
ƒپƒCƒ“ƒچپ[ƒ^پ[‚ھƒJƒپƒ‰‹ى“®ƒ†ƒjƒbƒg‚ً’@‚«‰َ‚·‚ئ‚¢‚¤ٹ댯گ«‚إ‚·پB
‚±‚ê‚حپAƒچپ[ƒ^پ[‚ھƒeپ[ƒ‹ƒuپ[ƒ€‚ً’@‚ژ–Œج‚ئ“¯‚¶‚إ
ƒچپ[ƒ^پ[ƒOƒٹƒbƒv‚ھ’ح‚ٌ‚إ‚¢‚é•”•ھ‚إƒچپ[ƒ^پ[‚ج‰ٌ“]•ûŒü‚ةƒچپ[ƒ^پ[‚ج‰آ“®ˆو‚ةگ§Œہ‚ًگف‚¯‚ؤ‚¢‚ب‚¢‚±‚ئ‚ئپA
‚»‚جڈمچX‚ةپA
ƒXƒ^ƒrƒ‰ƒCƒUپ[‚جƒVپ[ƒ\پ[‚ھŒX‚¢‚ؤƒچپ[ƒ^پ[‚ھڈص“ث‚·‚é‚ج‚ھŒ´ˆِ‚إ‚·پB
 پ@پƒ
ƒsƒbƒ`‚ھچ‚‚¢‚ئچX‚ةڈم‚ھ‚è‚ـ‚·‚ھپAژخ‚ك‚ة‚ب‚ء‚½‚ـ‚ـ‚إ‹}چ~‰؛‚µ‚½’…’nژ‚جڈص“ث‚إ‚ ‚èƒچپ[ƒ^پ[‚ج‹}Œ¸‘¬‚ھƒپƒCƒ“‚ب‚ج‚إپAƒsƒbƒ`‚حچ‚‚‚ب‚¢ƒnƒY‚إ‚·پB
‚ ‚ئپAƒXƒڈƒbƒVƒ…ƒvƒŒپ[ƒg‚ھ‘OŒX‚µ‚ؤ‚é‚ئ•s–،‚¢‚و‚¤‚إپA‚±‚ê‚àگ§Œہ‚ً•t‚¯‚½‚¢‚إ‚·پB
ƒGƒ‹ƒS50‚إ‚حƒMƒٹƒMƒٹگG‚ê‚ب‚¢‚و‚¤‚إ‚·‚ج‚إپA
ƒVپ[ƒ\پ[‚ةگ§Œہ‚ً‚©‚¯‚ؤپA
ƒgƒ‹ƒN‚ج‹‚¢ƒTپ[ƒ{‚إƒsƒbƒ`‚ً’ل‚•غ‚ؤ‚خ”ً‚¯‚ç‚ê‚é‚©‚à’m‚ê‚ـ‚¹‚ٌپB
‚ـ‚½پA
ƒXƒ^ƒrƒŒƒX‚إ‚ح‘½ڈٹةکa‚·‚é‚ج‚إ‚حپH
‚ئ‚¢‚¤‰آ”\گ«‚ًچl‚¦‚ؤ‚¨‚è‚ـ‚·پB
--t-rex.html--
پ@پƒ
ƒsƒbƒ`‚ھچ‚‚¢‚ئچX‚ةڈم‚ھ‚è‚ـ‚·‚ھپAژخ‚ك‚ة‚ب‚ء‚½‚ـ‚ـ‚إ‹}چ~‰؛‚µ‚½’…’nژ‚جڈص“ث‚إ‚ ‚èƒچپ[ƒ^پ[‚ج‹}Œ¸‘¬‚ھƒپƒCƒ“‚ب‚ج‚إپAƒsƒbƒ`‚حچ‚‚‚ب‚¢ƒnƒY‚إ‚·پB
‚ ‚ئپAƒXƒڈƒbƒVƒ…ƒvƒŒپ[ƒg‚ھ‘OŒX‚µ‚ؤ‚é‚ئ•s–،‚¢‚و‚¤‚إپA‚±‚ê‚àگ§Œہ‚ً•t‚¯‚½‚¢‚إ‚·پB
ƒGƒ‹ƒS50‚إ‚حƒMƒٹƒMƒٹگG‚ê‚ب‚¢‚و‚¤‚إ‚·‚ج‚إپA
ƒVپ[ƒ\پ[‚ةگ§Œہ‚ً‚©‚¯‚ؤپA
ƒgƒ‹ƒN‚ج‹‚¢ƒTپ[ƒ{‚إƒsƒbƒ`‚ً’ل‚•غ‚ؤ‚خ”ً‚¯‚ç‚ê‚é‚©‚à’m‚ê‚ـ‚¹‚ٌپB
‚ـ‚½پA
ƒXƒ^ƒrƒŒƒX‚إ‚ح‘½ڈٹةکa‚·‚é‚ج‚إ‚حپH
‚ئ‚¢‚¤‰آ”\گ«‚ًچl‚¦‚ؤ‚¨‚è‚ـ‚·پB
--t-rex.html--
پƒ‚؟‚ه‚ء‚ئ•ھٹ„
پE‹ك‚‚ةچL‚¢ڈêڈٹ‚ھ–³‚ˆêگl‚إƒfƒ‚“I‚بŒںچ¸‚ً‚·‚é‚ةچl‚¦‚½‚ج‚ھپA
ƒJƒپƒ‰‚ج’ا”ِ“IƒRƒ“ƒgƒچپ[ƒ‹•û–@‚إ‚·پB
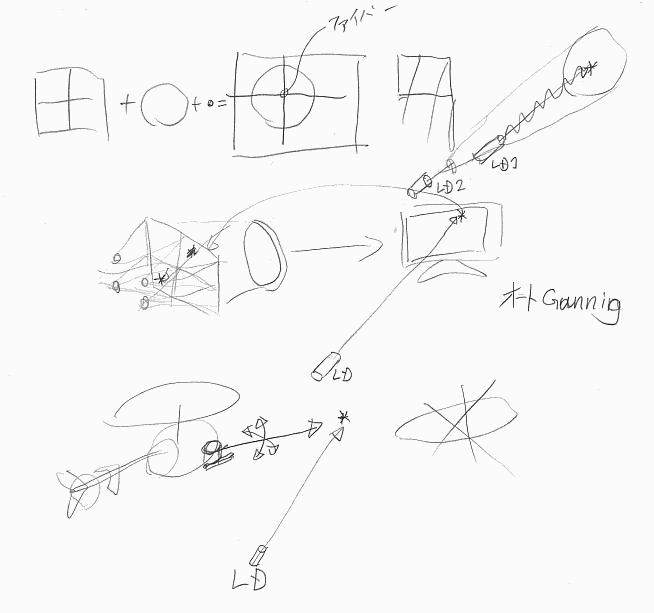
Œُ‚ً“ا‚ق—جˆو‚ً2پ~2‚ة‚µ‚ؤپAƒIپ[ƒoپ[ƒVƒ…پ[ƒg‚ً”ً‚¯‚邽‚ك–ع•W‚©‚ç‚ج•دˆظ—ت‚ًŒ©گد‚à‚éƒTپ[ƒNƒ‹‚à‚ ‚è‚ـ‚·پB
‚±‚ê‚ة‚و‚ء‚ؤƒŒپ[ƒUپ[Œُ‚ة‚و‚èƒJƒپƒ‰‚ًژ‹“_’†‰›‚ةژ©“®گ§Œن‚·‚é‰ٌکH‚ھ‚آ‚‚ê‚é‚إ‚·پB
‚ـ‚½پAƒ‚ƒjƒ^‚ةƒŒپ[ƒUپ[‚ً“–‚ؤ‚ؤ•ûŒüژwژ¦‚·‚é‚ج‚حFPS‚ة‚àژg‚¦‚ـ‚·پBپƒ“ھ‚âGUN‚ة•t‚¯‚éپBپƒ‚¨Œف‚¢‚ًگط‚è‘ض‚¦‚½‚èMIX‚µ‚ؤ‚à
 پ@پƒ
پEƒRƒ“ƒgƒچپ[ƒ‰پ[
ƒgƒٹƒ€پ¨ƒJƒپƒ‰”÷“®پ@پ@پƒڈئڈ€گف’è
ƒJƒپƒ‰ƒZƒ“ƒ^پ[ƒXƒCƒbƒ`پ@پƒگ^‚ٌ‘O‚ًŒ©‚ب‚¢‚ئچ¢‚é‚ئ‚«پBپƒگ…•½–ت‚ج‚ف‹C‚ة‚·‚éڈêچ‡‚ح‹آٹp‚ج‚ف‚جŒإ’èپB
ƒYپ[ƒ€ƒXƒCƒbƒ`پA
DVD‚جLD”Œُ‰ٌکHپB
‹@‘ج‚ھڈd‚‚ب‚ء‚½ڈêچ‡ƒpƒڈپ[‚ً—v‹پ‚³‚ê‚ـ‚·‚ثپB
ƒpƒڈپ[UP‚ة‚حپAƒRƒŒƒNƒeƒBƒu‚ًڈم‚°‚éچsˆ×‚ة‹ك‚¢‚ئژv‚ي‚ê‚ـ‚·‚ھپA
’Pڈƒ‚ة‚ح‰ٌ“]گ”‚ًڈم‚°‚é•û‚ھ—ا‚¢‚ج‚إ‚·‚ھپAŒoŒ±“I‚ة‚ح‹@•q‚ة‚ب‚éƒCƒپپ[ƒW‚ھ‚ ‚è‚ـ‚·پB
‚±‚ê‚ة‘خ‚µ‚ؤ‚ح“K“x‚بƒŒƒxƒ‹‚إپA
‹@•q‚ئ‚حپA”½‰‘¬“x‚ئ‚¢‚¤ڈêچ‡‚ئ‘ا‚ج‘€چى‚ة‘خ‚·‚é‚ا‚¤‚³‚ج‚¨‚¨‚«‚³‚إ‚·پB
‘ا‚ج‘ه‚«‚³‚ح‚حƒvƒچƒ|‚إ•د‚¦‚ç‚ê‚é‚إ‚·‚ثپB
ƒpƒڈپ[‚ج‚ف‚©‘€چىگ«‚©Œّ—¦‚©پH
ƒMƒ„پAƒچپ[ƒ^پ[‰ٌ“]گ”‚ئƒsƒbƒ`پAƒeپ[ƒ‹ƒuپ[ƒ€‚ج’·‚³‚ئگ§Œن”حˆح‚ئ‚¢‚¤ƒoƒ‰ƒ“ƒX‚ھٹض—^‚µ‚ؤ‚ـ‚·‚ج‚إپA
’T‚·‚ج‚ح‘ه•د‚إ‚·پB
ƒwƒbƒhƒچƒbƒNƒWƒƒƒCƒچ‚ج‘گف‚إ‚·پB
7.7g‚إGY-401‚ة”—‚é‚ئڈ‘‚¢‚ؤ‚ ‚è‚ـ‚µ‚½پB
پ@پƒ
پEƒRƒ“ƒgƒچپ[ƒ‰پ[
ƒgƒٹƒ€پ¨ƒJƒپƒ‰”÷“®پ@پ@پƒڈئڈ€گف’è
ƒJƒپƒ‰ƒZƒ“ƒ^پ[ƒXƒCƒbƒ`پ@پƒگ^‚ٌ‘O‚ًŒ©‚ب‚¢‚ئچ¢‚é‚ئ‚«پBپƒگ…•½–ت‚ج‚ف‹C‚ة‚·‚éڈêچ‡‚ح‹آٹp‚ج‚ف‚جŒإ’èپB
ƒYپ[ƒ€ƒXƒCƒbƒ`پA
DVD‚جLD”Œُ‰ٌکHپB
‹@‘ج‚ھڈd‚‚ب‚ء‚½ڈêچ‡ƒpƒڈپ[‚ً—v‹پ‚³‚ê‚ـ‚·‚ثپB
ƒpƒڈپ[UP‚ة‚حپAƒRƒŒƒNƒeƒBƒu‚ًڈم‚°‚éچsˆ×‚ة‹ك‚¢‚ئژv‚ي‚ê‚ـ‚·‚ھپA
’Pڈƒ‚ة‚ح‰ٌ“]گ”‚ًڈم‚°‚é•û‚ھ—ا‚¢‚ج‚إ‚·‚ھپAŒoŒ±“I‚ة‚ح‹@•q‚ة‚ب‚éƒCƒپپ[ƒW‚ھ‚ ‚è‚ـ‚·پB
‚±‚ê‚ة‘خ‚µ‚ؤ‚ح“K“x‚بƒŒƒxƒ‹‚إپA
‹@•q‚ئ‚حپA”½‰‘¬“x‚ئ‚¢‚¤ڈêچ‡‚ئ‘ا‚ج‘€چى‚ة‘خ‚·‚é‚ا‚¤‚³‚ج‚¨‚¨‚«‚³‚إ‚·پB
‘ا‚ج‘ه‚«‚³‚ح‚حƒvƒچƒ|‚إ•د‚¦‚ç‚ê‚é‚إ‚·‚ثپB
ƒpƒڈپ[‚ج‚ف‚©‘€چىگ«‚©Œّ—¦‚©پH
ƒMƒ„پAƒچپ[ƒ^پ[‰ٌ“]گ”‚ئƒsƒbƒ`پAƒeپ[ƒ‹ƒuپ[ƒ€‚ج’·‚³‚ئگ§Œن”حˆح‚ئ‚¢‚¤ƒoƒ‰ƒ“ƒX‚ھٹض—^‚µ‚ؤ‚ـ‚·‚ج‚إپA
’T‚·‚ج‚ح‘ه•د‚إ‚·پB
ƒwƒbƒhƒچƒbƒNƒWƒƒƒCƒچ‚ج‘گف‚إ‚·پB
7.7g‚إGY-401‚ة”—‚é‚ئڈ‘‚¢‚ؤ‚ ‚è‚ـ‚µ‚½پB
 پ@پƒƒwƒbƒhƒچƒbƒNƒWƒƒƒCƒچ‚ج’ا‰ءپB
ٹ´“x’²گ®‚ج‚½‚كپAژَگM‹@‚جƒ`ƒƒƒ“ƒlƒ‹گ”‚ًڈم‚°‚و‚¤‚ئژv‚¢‚ـ‚·پB
ƒچپ[ƒ^پ[ƒOƒٹƒbƒv‚ح‚»‚ج‚ـ‚ـ‚¾‚ئ‚©‚ب‚èƒKƒ^ƒKƒ^‚ب‚ج‚إپAƒXƒ€پ[ƒY‚ة“®‚’ِ“x‚ج”حˆح“à‚إ’÷‚ك‚±‚ٌ‚إ‚¨‚•K—vگ«‚ًٹ´‚¶‚ـ‚µ‚½پB
پEƒGƒŒƒxپ[ƒ^پ[•ûŒü‚جƒKƒ^
ƒXƒڈƒbƒVƒ…ƒvƒŒپ[ƒg‚ً“®‚©‚µ‚ؤ‚ف‚é‚ئƒGƒŒƒxپ[ƒ^پ[•ûŒü‚جƒKƒ^‚ھ‘ه‚«‚¢‚إ‚·پB
ƒTپ[ƒ{‚جژو‚è•t‚¯•”•ھ‚âƒTپ[ƒ{‚جژ²‚جƒKƒ^پA
ƒzپ[ƒ“‚ئƒ{پ[ƒ‹‚جˆت’uٹضŒW‚ة‚و‚ء‚ؤƒˆƒŒ‚âƒKƒ^‚ج—ت‚جٹg‘هپ{ƒzپ[ƒ“‚ج•‰’S‚àٹg‘هپA
پ@پƒƒwƒbƒhƒچƒbƒNƒWƒƒƒCƒچ‚ج’ا‰ءپB
ٹ´“x’²گ®‚ج‚½‚كپAژَگM‹@‚جƒ`ƒƒƒ“ƒlƒ‹گ”‚ًڈم‚°‚و‚¤‚ئژv‚¢‚ـ‚·پB
ƒچپ[ƒ^پ[ƒOƒٹƒbƒv‚ح‚»‚ج‚ـ‚ـ‚¾‚ئ‚©‚ب‚èƒKƒ^ƒKƒ^‚ب‚ج‚إپAƒXƒ€پ[ƒY‚ة“®‚’ِ“x‚ج”حˆح“à‚إ’÷‚ك‚±‚ٌ‚إ‚¨‚•K—vگ«‚ًٹ´‚¶‚ـ‚µ‚½پB
پEƒGƒŒƒxپ[ƒ^پ[•ûŒü‚جƒKƒ^
ƒXƒڈƒbƒVƒ…ƒvƒŒپ[ƒg‚ً“®‚©‚µ‚ؤ‚ف‚é‚ئƒGƒŒƒxپ[ƒ^پ[•ûŒü‚جƒKƒ^‚ھ‘ه‚«‚¢‚إ‚·پB
ƒTپ[ƒ{‚جژو‚è•t‚¯•”•ھ‚âƒTپ[ƒ{‚جژ²‚جƒKƒ^پA
ƒzپ[ƒ“‚ئƒ{پ[ƒ‹‚جˆت’uٹضŒW‚ة‚و‚ء‚ؤƒˆƒŒ‚âƒKƒ^‚ج—ت‚جٹg‘هپ{ƒzپ[ƒ“‚ج•‰’S‚àٹg‘هپA
 پ@پƒ
پE3ژ²ƒWƒƒƒCƒچ
ƒGƒ‹ƒچƒ“پAƒGƒŒƒxپ[ƒ^پ[‚جH/Lپ@پƒƒWƒƒƒCƒچ‚جگ§Œن‚ة50ƒpپ[ƒZƒ“ƒg‚جگ§Œہ‚ً•t‚¯‚é‚©پH
ƒ‰ƒ_پ[‚جH/Lپ@پƒˆع“®ٹp‹L‰¯‚ج—L–³پپIگ§Œن‚ج—L–³پB
–{—ˆپAƒ‰ƒ_پ[‚جƒٹƒ“ƒPپ[ƒW‚حƒچƒbƒh‚ئƒvƒbƒVƒ…ƒvƒ‹•”•ھ‚ھ’¼ٹp‚إ
‚»‚ج‚ئ‚«‚جƒRƒ“ƒgƒچپ[ƒ‹ƒXƒeƒBƒbƒN‚ھƒZƒ“ƒ^پ[‚ة‚ب‚ء‚ؤپA
ƒwƒٹ‚جƒeپ[ƒ‹‚ھژ~‚ـ‚é‚ج‚ھ—ا‚¢ƒZƒbƒeƒBƒ“ƒO‚ب‚ج‚إ‚·‚ھپA
‚±‚ج‹@‘ج‚ج
ƒeپ[ƒ‹ƒtƒ@ƒ“‚ھگ¶‚¶‚³‚¹‚郂پ[ƒپƒ“ƒg‚ة‘خ‚µ‚ؤ
ƒپƒCƒ“ƒچپ[ƒ^پ[‚ج‹َ—ح“I’ïچR‚حچ‚‚¢ƒoƒ‰ƒ“ƒX‚ة‚ب‚ء‚ؤ‚¨‚è‚ـ‚·پB
‚»‚جŒ´ˆِ‚حپA
ƒsƒbƒ`‚ھچ‚‚¢ƒRƒg‚ھƒپƒCƒ“‚إ‚·‚ھپA
‚ـ‚½پAƒXƒچƒbƒgƒ‹‚ئƒsƒbƒ`‚جƒoƒ‰ƒ“ƒX‚إ‹¶‚¤ƒtƒ@ƒNƒ^پ[‚إ‚·‚ج‚إپAژٹش‚ھ‚©‚©‚è‚ـ‚·پB
090606
11پ‹ˆب‰؛‚ةگ§Œہ‚ج•K—vگ«پB
پ@پƒ
پE3ژ²ƒWƒƒƒCƒچ
ƒGƒ‹ƒچƒ“پAƒGƒŒƒxپ[ƒ^پ[‚جH/Lپ@پƒƒWƒƒƒCƒچ‚جگ§Œن‚ة50ƒpپ[ƒZƒ“ƒg‚جگ§Œہ‚ً•t‚¯‚é‚©پH
ƒ‰ƒ_پ[‚جH/Lپ@پƒˆع“®ٹp‹L‰¯‚ج—L–³پپIگ§Œن‚ج—L–³پB
–{—ˆپAƒ‰ƒ_پ[‚جƒٹƒ“ƒPپ[ƒW‚حƒچƒbƒh‚ئƒvƒbƒVƒ…ƒvƒ‹•”•ھ‚ھ’¼ٹp‚إ
‚»‚ج‚ئ‚«‚جƒRƒ“ƒgƒچپ[ƒ‹ƒXƒeƒBƒbƒN‚ھƒZƒ“ƒ^پ[‚ة‚ب‚ء‚ؤپA
ƒwƒٹ‚جƒeپ[ƒ‹‚ھژ~‚ـ‚é‚ج‚ھ—ا‚¢ƒZƒbƒeƒBƒ“ƒO‚ب‚ج‚إ‚·‚ھپA
‚±‚ج‹@‘ج‚ج
ƒeپ[ƒ‹ƒtƒ@ƒ“‚ھگ¶‚¶‚³‚¹‚郂پ[ƒپƒ“ƒg‚ة‘خ‚µ‚ؤ
ƒپƒCƒ“ƒچپ[ƒ^پ[‚ج‹َ—ح“I’ïچR‚حچ‚‚¢ƒoƒ‰ƒ“ƒX‚ة‚ب‚ء‚ؤ‚¨‚è‚ـ‚·پB
‚»‚جŒ´ˆِ‚حپA
ƒsƒbƒ`‚ھچ‚‚¢ƒRƒg‚ھƒپƒCƒ“‚إ‚·‚ھپA
‚ـ‚½پAƒXƒچƒbƒgƒ‹‚ئƒsƒbƒ`‚جƒoƒ‰ƒ“ƒX‚إ‹¶‚¤ƒtƒ@ƒNƒ^پ[‚إ‚·‚ج‚إپAژٹش‚ھ‚©‚©‚è‚ـ‚·پB
090606
11پ‹ˆب‰؛‚ةگ§Œہ‚ج•K—vگ«پB
 پ@
گ§ŒہپFƒwƒbƒhژو‚è•t‚¯‚جƒlƒW‚جژ²‚©‚ç4mmڈم
پ@
گ§ŒہپFƒwƒbƒhژو‚è•t‚¯‚جƒlƒW‚جژ²‚©‚ç4mmڈم
 پ@پƒگ§Œہ4mmڈم
090607
‚±‚ê‚إ”ٍچsƒeƒXƒg‚جŒ‹‰تپA“®چى‚ة•د‚بƒNƒZ‚à‚إ‚¸‚©‚ب‚艸‚â‚©‚ة‚ب‚ء‚½ٹ´‚¶‚ھ‚µ‚ـ‚µ‚½پB
ƒچپ[ƒ^پ[‚ئƒTپ[ƒ{‚ح‚ش‚آ‚©‚è‚ة‚‚‚ب‚è‚ـ‚µ‚½‚ھپA
ƒtƒFƒ“ƒX‚ً‚و‚¯‚و‚¤‚ئ‚µ‚ؤ‹}Œƒ‚ةژخ‚ك‚ة‚¨‚낵‚½‚ئ‚«‚ش‚آ‚¯‚ـ‚µ‚½پA
ڈلٹQ•¨‚ھ‚ب‚¯‚ê‚خ‚±‚ج‚و‚¤‚ب‚±‚ئ‚ة‚ح‚ب‚è‚ة‚‚¢‚إ‚µ‚ه‚¤پB
پ@پƒگ§Œہ4mmڈم
090607
‚±‚ê‚إ”ٍچsƒeƒXƒg‚جŒ‹‰تپA“®چى‚ة•د‚بƒNƒZ‚à‚إ‚¸‚©‚ب‚艸‚â‚©‚ة‚ب‚ء‚½ٹ´‚¶‚ھ‚µ‚ـ‚µ‚½پB
ƒچپ[ƒ^پ[‚ئƒTپ[ƒ{‚ح‚ش‚آ‚©‚è‚ة‚‚‚ب‚è‚ـ‚µ‚½‚ھپA
ƒtƒFƒ“ƒX‚ً‚و‚¯‚و‚¤‚ئ‚µ‚ؤ‹}Œƒ‚ةژخ‚ك‚ة‚¨‚낵‚½‚ئ‚«‚ش‚آ‚¯‚ـ‚µ‚½پA
ڈلٹQ•¨‚ھ‚ب‚¯‚ê‚خ‚±‚ج‚و‚¤‚ب‚±‚ئ‚ة‚ح‚ب‚è‚ة‚‚¢‚إ‚µ‚ه‚¤پB
 ƒچپ[ƒ^پ[‚ج•—‚«‚艹‚ھ‚·‚é‚ج‚إƒsƒbƒ`‚حچ‚‚ك‚ج‚و‚¤‚إ‚·پB
‚½‚¢‚µ‚ه‚ئ‚µ‚ؤ‚حپA
’ل‚¢ƒTپ[ƒ{‚ة‚·‚邱‚ئ‚إ—]—T‚ًچى‚é‚©پA
ƒچپ[ƒ^پ[‚ج•—‚«‚艹‚ھ‚·‚é‚ج‚إƒsƒbƒ`‚حچ‚‚ك‚ج‚و‚¤‚إ‚·پB
‚½‚¢‚µ‚ه‚ئ‚µ‚ؤ‚حپA
’ل‚¢ƒTپ[ƒ{‚ة‚·‚邱‚ئ‚إ—]—T‚ًچى‚é‚©پA
 ƒTپ[ƒ{‚ًŒم‚ë‚ةگف’u‚µ‚ؤƒٹƒ“ƒPپ[ƒW‚إ‘€چى‚·‚é•û–@‚àچlچ¸’†‚إ‚·پB
ƒپƒCƒ“ƒ}ƒXƒg‚à’·‚‚·‚é?
ƒeپ[ƒ‹ƒuپ[ƒ€‚ًŒًٹ·‚µ‚ـ‚µ‚½پB
ƒxƒ‹ƒg‚àŒًٹ·‚إٹO‚·‚ج‚إ‚·‚ھ‚»‚ج‚ئ‚«گ¶‚¸‚éƒeپ[ƒ‹‚جƒپƒJ‚ج•ھ‰ً‚حƒپƒ“ƒeƒiƒ“ƒXگ«‚ھˆ«‚¢‚إ‚·پB
چׂ©‚¢ƒXƒyپ[ƒTپ[‚ھٹO‚ê‚ؤ‚â‚ء‚©‚¢‚ب‚ج‚ئپAƒlƒW‚ًٹO‚µ‚ة‚‚¢‚ج‚إچ¶‰E‹t‚ة‚µ‚ؤ—~‚µ‚¢‚إ‚·پB
‹C‚ھ•t‚¢‚½‚ج‚إ‚·‚ھƒuƒŒپ[ƒh‚ھ‹t‚إ‚µ‚½پB
ƒtƒcƒE‹C‚ھ•t‚‚إ‚·‚ج‚إƒٹƒ“ƒPپ[ƒW‚جƒڈƒbƒVƒƒپ[‚ًژو‚è•t‚¯‚و‚¤‚ئٹO‚µ‚ؤ‚ف‚½‚ئ‚«‚ةٹشˆل‚ء‚½‚و‚¤‚إ‚·پB
‚»‚ê‚إƒzƒoƒٹƒ“ƒO‚ھڈo—ˆ‚ؤ‚½‚ج‚ھ•sژv‹c‚إ‚·‚ثپB
ƒWƒƒƒCƒچG-190‚ً’¼—ٌ‚ة•t‚¯‚ؤ‚ف‚ـ‚µ‚½پB
ƒTپ[ƒ{‚ًŒم‚ë‚ةگف’u‚µ‚ؤƒٹƒ“ƒPپ[ƒW‚إ‘€چى‚·‚é•û–@‚àچlچ¸’†‚إ‚·پB
ƒپƒCƒ“ƒ}ƒXƒg‚à’·‚‚·‚é?
ƒeپ[ƒ‹ƒuپ[ƒ€‚ًŒًٹ·‚µ‚ـ‚µ‚½پB
ƒxƒ‹ƒg‚àŒًٹ·‚إٹO‚·‚ج‚إ‚·‚ھ‚»‚ج‚ئ‚«گ¶‚¸‚éƒeپ[ƒ‹‚جƒپƒJ‚ج•ھ‰ً‚حƒپƒ“ƒeƒiƒ“ƒXگ«‚ھˆ«‚¢‚إ‚·پB
چׂ©‚¢ƒXƒyپ[ƒTپ[‚ھٹO‚ê‚ؤ‚â‚ء‚©‚¢‚ب‚ج‚ئپAƒlƒW‚ًٹO‚µ‚ة‚‚¢‚ج‚إچ¶‰E‹t‚ة‚µ‚ؤ—~‚µ‚¢‚إ‚·پB
‹C‚ھ•t‚¢‚½‚ج‚إ‚·‚ھƒuƒŒپ[ƒh‚ھ‹t‚إ‚µ‚½پB
ƒtƒcƒE‹C‚ھ•t‚‚إ‚·‚ج‚إƒٹƒ“ƒPپ[ƒW‚جƒڈƒbƒVƒƒپ[‚ًژو‚è•t‚¯‚و‚¤‚ئٹO‚µ‚ؤ‚ف‚½‚ئ‚«‚ةٹشˆل‚ء‚½‚و‚¤‚إ‚·پB
‚»‚ê‚إƒzƒoƒٹƒ“ƒO‚ھڈo—ˆ‚ؤ‚½‚ج‚ھ•sژv‹c‚إ‚·‚ثپB
ƒWƒƒƒCƒچG-190‚ً’¼—ٌ‚ة•t‚¯‚ؤ‚ف‚ـ‚µ‚½پB
 پ@پƒƒچƒ“ƒOƒeپ[ƒ‹پ{G-190
پEƒAƒپƒ“ƒ{ˆبٹO‚جƒtƒ‹‘•”ُ
ƒJƒپƒ‰+ƒgƒ‰ƒ“ƒXƒ~ƒbƒ^+‹ى“®ƒ†ƒjƒbƒg+ƒ}ƒCƒNƒچƒTپ[ƒ{+(LD+ƒRƒCƒ““d’r)+ƒAƒ‹ƒ~ƒpƒCƒv
پ@پƒƒچƒ“ƒOƒeپ[ƒ‹پ{G-190
پEƒAƒپƒ“ƒ{ˆبٹO‚جƒtƒ‹‘•”ُ
ƒJƒپƒ‰+ƒgƒ‰ƒ“ƒXƒ~ƒbƒ^+‹ى“®ƒ†ƒjƒbƒg+ƒ}ƒCƒNƒچƒTپ[ƒ{+(LD+ƒRƒCƒ““d’r)+ƒAƒ‹ƒ~ƒpƒCƒv
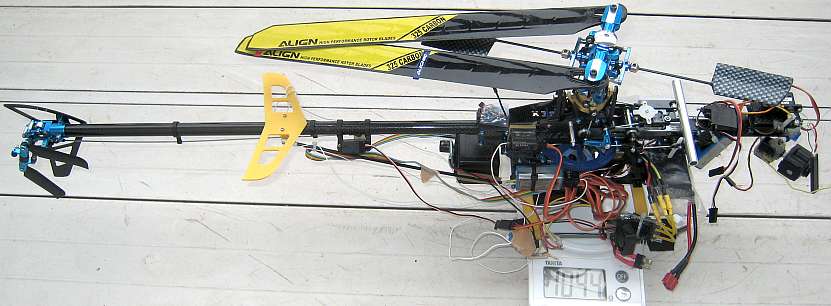 پ@پƒ1044g
پE‚¹‚ء‚©‚‚ب‚ج‚إƒKƒoƒiپ[ƒ‚پ[ƒh‚ًژg‚ء‚ؤ‚ف‚½‚¢‚إ‚·پBپƒ‚¢‚ـ‚¾20A‚ج‚ھژg‚¦‚ؤ‚ـ‚·‚ج‚إپA
ƒAƒNƒeƒBƒuRPM ƒRƒ“ƒgƒچپ[ƒ‹(ƒKƒoƒiپ[ƒ‚پ[ƒh) ƒ‚پ[ƒ^پ[RPM = [“d‹C“I RPM*2 / ƒ‚پ[ƒ^پ[‚ج‹ةگ”]
No. of Stator Arms 9
No. of Magnet Poles 6
[ƒ‚پ[ƒh2]‚إ‚جƒچپ[ƒ^پ[‚جچإ‘ه‰ٌ“]گ”‚حپA
(106500پ~2/6)پE(11/150)پپ2603rpmپ@
ژہچغ‚ة‰ٌ‚µ‚ؤ‚ف‚é‚ئ‰ٌ“]‚ھ‹°‚낵‚‚ج‚ë‚¢‚إ‚·پB
‚±‚جŒvژZژ®‚ح‚¨‚©‚µ‚¢‚إ‚·پB
‚و‚ء‚ؤپA[ƒ‚پ[ƒh3]‚إ‚â‚ء‚ؤ‚ف‚½‚ج‚إ‚·‚ھپA
–³’²گ®‚إ‚؟‚ه‚¤‚ا—ا‚¢‚ف‚½‚¢‚إ‚·پB
‘«‚è‚ب‚¢‚ب‚ç‚خپAƒMƒ„‚جژ•گ”‚ً13T‚ـ‚إ‚ج”حˆح‚إUP‚ئ‚©ƒچپ[ƒ^پ[‚ج•دچX‚ً‚·‚邵‚©‚ب‚¢‚إ‚·‚ثپB
ƒ^ƒRƒپپ[ƒ^پ[‚ھ•K—p‚»‚¤‚إ‚·پB
ƒeپ[ƒ‹‚ج‰ٌ“]گ”‚©‚瓱‚‚ئ
1400پ~2پ~5(ƒeپ[ƒ‹)/60پپ233Hz
RevMix‚ً‚©‚ب‚肨‚¨‚«‚‚µ‚ؤ‚àƒeپ[ƒ‹‚ھ—ژ‚؟’…‚©‚ب‚¢‚ج‚إپA
ƒwƒbƒhƒچƒbƒN‚ً•t‚¯‚½‚¢‚إ‚·پB
090622
ƒKƒoƒiپ[ƒ‚پ[ƒh‚جƒeƒXƒgپB
ƒXƒچƒbƒgƒ‹ƒXƒeƒBƒbƒN50ƒpپ[ƒZƒ“ƒg‚جڈَ‘ش‚إچإچ‚‰ٌ“]گ”‚ة‚µ‚ؤ‚à
•‚ڈم‚ح‚©‚ب‚èچ‚‚¢ƒXƒeƒBƒbƒN‚جˆت’u‚ئ‚ب‚è‚ـ‚·پBپƒ‰¹‚حچ‚‚¢‚و‚¤‚ة‚à•·‚±‚¦‚é‚ج‚إ‚·‚ھپA
‚آ‚ـ‚èپAƒsƒbƒ`‚ھچ‚‚ك‚إ‚·‚ثپB‰^“®‚ة—]—ح‚ً•t‚¯‚é‚ب‚çپAƒKƒoƒiپ[‚حژg‚¦‚ب‚¢‚و‚¤‚إ‚·پB
‘¼‚ة‚آ‚©‚¨‚¤‚ئچl‚¦‚é‚ب‚çپA
’¼گع“I‘خڈˆ‚حƒMƒ„‚ً12T‚ةڈم‚°‚邱‚ئ‚ئپAƒuƒŒپ[ƒh’·‚ً‚ج‚خ‚·‚إ‚·پB
ڈo—ح‚ًڈم‚°‚½‚¢‚ئ‚«‚حپAƒsƒbƒ`‚ھ’ل‚‚ؤ‰ٌ“]گ”‚ھچ‚‚¢ƒoƒ‰ƒ“ƒX‚ج•û‚ھ—ا‚¢‚ئژv‚ي‚ê‚ـ‚·پB
پEƒyƒCƒچپ[ƒh‚ئƒچپ[ƒ^پ[‚ة‚آ‚¢‚ؤچؤچl
‚ي‚¸‚©1cmگL‚ر‚é‚ئ‚·‚é‚ئپA
–تگد‚ئ‚µ‚ؤ‚ح
(3848-3631)/3630پپ0.06پ@پ¨پ@6پ“
ƒXƒsپ[ƒh’†گS‚©‚ç‚ج”¼Œa‚ة”ن—ل‚µ‚ؤچ‚‚¢‚إ‚·‚ج‚إپA
‰~ٹآ‚ًچl‚¦‚ؤˆہ’¼‚ةپA
پçdrƒخ(r^2)rƒض
‚ئ‚ب‚è‚ـ‚·‚و‚¤‚إپA
Œ‹چ\ƒ€ƒ_‚إ‚ب‚¢ƒRƒg‚ة‚ب‚è‚ـ‚·‚ثپB
‚ ‚ئپAƒuƒŒپ[ƒh‚ج•‚àژث‰e–ت‚ئŒم—¬‚ًچl‚¦چ‡‚ي‚¹‚ؤ”ن—ل’ِ“x‚حڈo‚ب‚¢‚ئ‚µ‚ؤ‚à‘½ڈٹضŒW‚µ‚»‚¤‚إ‚·پB
ƒeپ[ƒ‹ƒuƒŒپ[ƒh‚ج’·‚³‚ة‰ء‚¦‚ؤپAƒuپ[ƒ€‚ھ’·‚¢‚ئƒeƒR‚جŒ´—‚إƒچƒX‚ھŒ¸‚é‚ج‚إŒّ—¦UP“I‚ة‚à—LŒّ‚ةژv‚¤‚إ‚·پB
ƒuپ[ƒ€‚ً’·‚‚µ‚½‚çپAڈdگS‚ھ‚©‚ب‚肸‚ê‚ـ‚µ‚½پB
ƒٹƒ“ƒPپ[ƒW‚ً‰„’·‚µ‚ؤ‚µ‚ؤƒTپ[ƒ{‚ً‘O‚ة‚¤‚آ‚·‚ئ‚©پB
‹@‘ج‚ھ‚ـ‚½‚à‚âچ¶‚ة‰ٌ‚낤‚ئ‚·‚é‚ج‚إ‚·‚ھپAƒsƒbƒ`‚ة–â‘è‚ح‚ب‚¢‚إ‚·پB
ƒeپ[ƒ‹ƒuƒŒپ[ƒh‚ھ‚©‚ب‚èچي‚ê‚ؤ‚¢‚é‚©‚ç‚ج‚و‚¤‚إ‚·پB
090618
ƒAƒپƒ“ƒ{‚جˆت’u‚ً‘O‚ة‚¸‚炵‚½‚çOK‚ة‚ب‚è‚ـ‚µ‚½پB
Œ‹چ\—ا‚”ٍ‚ش‚و‚¤‚ة‚ب‚ء‚½‚ج‚إ‚·‚ھپAگ§Œہ‚ھ‚©‚©‚ء‚ؤ‚éŒج‚ة“®‚«‚ھ“ف‚¢‚إ‚·پB
پ@پƒ1044g
پE‚¹‚ء‚©‚‚ب‚ج‚إƒKƒoƒiپ[ƒ‚پ[ƒh‚ًژg‚ء‚ؤ‚ف‚½‚¢‚إ‚·پBپƒ‚¢‚ـ‚¾20A‚ج‚ھژg‚¦‚ؤ‚ـ‚·‚ج‚إپA
ƒAƒNƒeƒBƒuRPM ƒRƒ“ƒgƒچپ[ƒ‹(ƒKƒoƒiپ[ƒ‚پ[ƒh) ƒ‚پ[ƒ^پ[RPM = [“d‹C“I RPM*2 / ƒ‚پ[ƒ^پ[‚ج‹ةگ”]
No. of Stator Arms 9
No. of Magnet Poles 6
[ƒ‚پ[ƒh2]‚إ‚جƒچپ[ƒ^پ[‚جچإ‘ه‰ٌ“]گ”‚حپA
(106500پ~2/6)پE(11/150)پپ2603rpmپ@
ژہچغ‚ة‰ٌ‚µ‚ؤ‚ف‚é‚ئ‰ٌ“]‚ھ‹°‚낵‚‚ج‚ë‚¢‚إ‚·پB
‚±‚جŒvژZژ®‚ح‚¨‚©‚µ‚¢‚إ‚·پB
‚و‚ء‚ؤپA[ƒ‚پ[ƒh3]‚إ‚â‚ء‚ؤ‚ف‚½‚ج‚إ‚·‚ھپA
–³’²گ®‚إ‚؟‚ه‚¤‚ا—ا‚¢‚ف‚½‚¢‚إ‚·پB
‘«‚è‚ب‚¢‚ب‚ç‚خپAƒMƒ„‚جژ•گ”‚ً13T‚ـ‚إ‚ج”حˆح‚إUP‚ئ‚©ƒچپ[ƒ^پ[‚ج•دچX‚ً‚·‚邵‚©‚ب‚¢‚إ‚·‚ثپB
ƒ^ƒRƒپپ[ƒ^پ[‚ھ•K—p‚»‚¤‚إ‚·پB
ƒeپ[ƒ‹‚ج‰ٌ“]گ”‚©‚瓱‚‚ئ
1400پ~2پ~5(ƒeپ[ƒ‹)/60پپ233Hz
RevMix‚ً‚©‚ب‚肨‚¨‚«‚‚µ‚ؤ‚àƒeپ[ƒ‹‚ھ—ژ‚؟’…‚©‚ب‚¢‚ج‚إپA
ƒwƒbƒhƒچƒbƒN‚ً•t‚¯‚½‚¢‚إ‚·پB
090622
ƒKƒoƒiپ[ƒ‚پ[ƒh‚جƒeƒXƒgپB
ƒXƒچƒbƒgƒ‹ƒXƒeƒBƒbƒN50ƒpپ[ƒZƒ“ƒg‚جڈَ‘ش‚إچإچ‚‰ٌ“]گ”‚ة‚µ‚ؤ‚à
•‚ڈم‚ح‚©‚ب‚èچ‚‚¢ƒXƒeƒBƒbƒN‚جˆت’u‚ئ‚ب‚è‚ـ‚·پBپƒ‰¹‚حچ‚‚¢‚و‚¤‚ة‚à•·‚±‚¦‚é‚ج‚إ‚·‚ھپA
‚آ‚ـ‚èپAƒsƒbƒ`‚ھچ‚‚ك‚إ‚·‚ثپB‰^“®‚ة—]—ح‚ً•t‚¯‚é‚ب‚çپAƒKƒoƒiپ[‚حژg‚¦‚ب‚¢‚و‚¤‚إ‚·پB
‘¼‚ة‚آ‚©‚¨‚¤‚ئچl‚¦‚é‚ب‚çپA
’¼گع“I‘خڈˆ‚حƒMƒ„‚ً12T‚ةڈم‚°‚邱‚ئ‚ئپAƒuƒŒپ[ƒh’·‚ً‚ج‚خ‚·‚إ‚·پB
ڈo—ح‚ًڈم‚°‚½‚¢‚ئ‚«‚حپAƒsƒbƒ`‚ھ’ل‚‚ؤ‰ٌ“]گ”‚ھچ‚‚¢ƒoƒ‰ƒ“ƒX‚ج•û‚ھ—ا‚¢‚ئژv‚ي‚ê‚ـ‚·پB
پEƒyƒCƒچپ[ƒh‚ئƒچپ[ƒ^پ[‚ة‚آ‚¢‚ؤچؤچl
‚ي‚¸‚©1cmگL‚ر‚é‚ئ‚·‚é‚ئپA
–تگد‚ئ‚µ‚ؤ‚ح
(3848-3631)/3630پپ0.06پ@پ¨پ@6پ“
ƒXƒsپ[ƒh’†گS‚©‚ç‚ج”¼Œa‚ة”ن—ل‚µ‚ؤچ‚‚¢‚إ‚·‚ج‚إپA
‰~ٹآ‚ًچl‚¦‚ؤˆہ’¼‚ةپA
پçdrƒخ(r^2)rƒض
‚ئ‚ب‚è‚ـ‚·‚و‚¤‚إپA
Œ‹چ\ƒ€ƒ_‚إ‚ب‚¢ƒRƒg‚ة‚ب‚è‚ـ‚·‚ثپB
‚ ‚ئپAƒuƒŒپ[ƒh‚ج•‚àژث‰e–ت‚ئŒم—¬‚ًچl‚¦چ‡‚ي‚¹‚ؤ”ن—ل’ِ“x‚حڈo‚ب‚¢‚ئ‚µ‚ؤ‚à‘½ڈٹضŒW‚µ‚»‚¤‚إ‚·پB
ƒeپ[ƒ‹ƒuƒŒپ[ƒh‚ج’·‚³‚ة‰ء‚¦‚ؤپAƒuپ[ƒ€‚ھ’·‚¢‚ئƒeƒR‚جŒ´—‚إƒچƒX‚ھŒ¸‚é‚ج‚إŒّ—¦UP“I‚ة‚à—LŒّ‚ةژv‚¤‚إ‚·پB
ƒuپ[ƒ€‚ً’·‚‚µ‚½‚çپAڈdگS‚ھ‚©‚ب‚肸‚ê‚ـ‚µ‚½پB
ƒٹƒ“ƒPپ[ƒW‚ً‰„’·‚µ‚ؤ‚µ‚ؤƒTپ[ƒ{‚ً‘O‚ة‚¤‚آ‚·‚ئ‚©پB
‹@‘ج‚ھ‚ـ‚½‚à‚âچ¶‚ة‰ٌ‚낤‚ئ‚·‚é‚ج‚إ‚·‚ھپAƒsƒbƒ`‚ة–â‘è‚ح‚ب‚¢‚إ‚·پB
ƒeپ[ƒ‹ƒuƒŒپ[ƒh‚ھ‚©‚ب‚èچي‚ê‚ؤ‚¢‚é‚©‚ç‚ج‚و‚¤‚إ‚·پB
090618
ƒAƒپƒ“ƒ{‚جˆت’u‚ً‘O‚ة‚¸‚炵‚½‚çOK‚ة‚ب‚è‚ـ‚µ‚½پB
Œ‹چ\—ا‚”ٍ‚ش‚و‚¤‚ة‚ب‚ء‚½‚ج‚إ‚·‚ھپAگ§Œہ‚ھ‚©‚©‚ء‚ؤ‚éŒج‚ة“®‚«‚ھ“ف‚¢‚إ‚·پB
 ƒJƒپƒ‰‚ج•ûˆتٹp‹ى“®•”•ھ‚ًŒ‹چ\‚ة‘ه•‚ب•دچX‚ً‚µ‚ـ‚µ‚½پB
ƒJƒپƒ‰‚ج•ûˆتٹp‹ى“®•”•ھ‚ًŒ‹چ\‚ة‘ه•‚ب•دچX‚ً‚µ‚ـ‚µ‚½پB
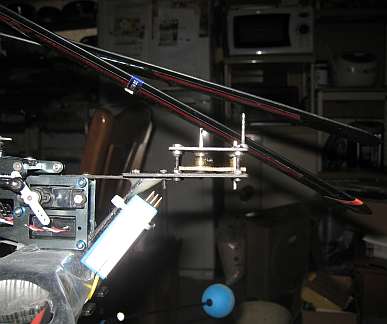 ‚¤پ[‚ٌپA‘O‚جƒAپ[ƒ€‚ًچ‚‚‚µ‚ب‚¢‚ئپB
‚¤پ[‚ٌپA‘O‚جƒAپ[ƒ€‚ًچ‚‚‚µ‚ب‚¢‚ئپB
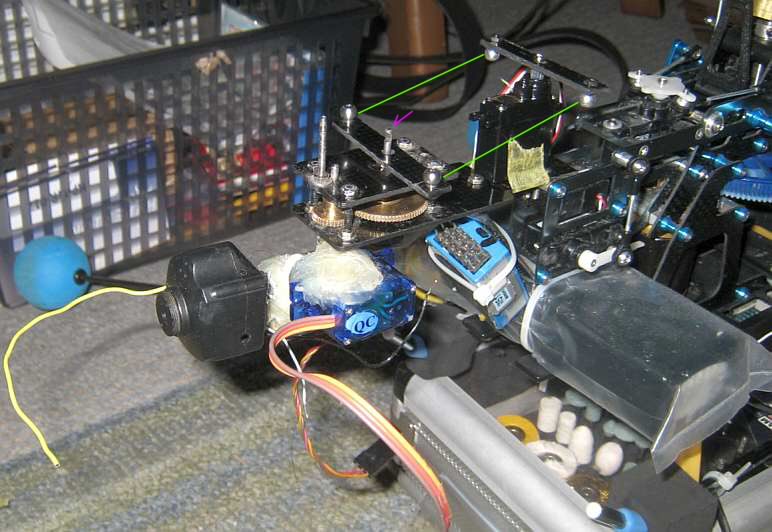 ‚إ‚àپcپA
‚إ‚àپcپA
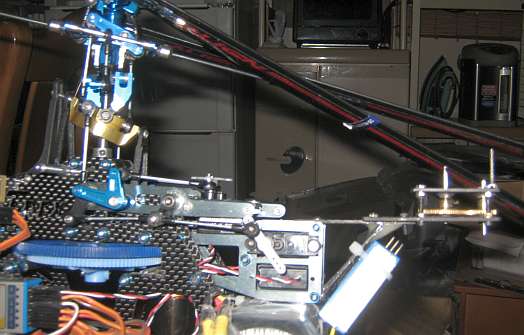 ƒٹƒ“ƒN‚ج’·‚³‚ح‘ه‘ج60mm‚إ‚·پB
ƒٹƒ“ƒN‚ج’·‚³‚ح‘ه‘ج60mm‚إ‚·پB
 پƒ59.07mm
پƒ59.07mm
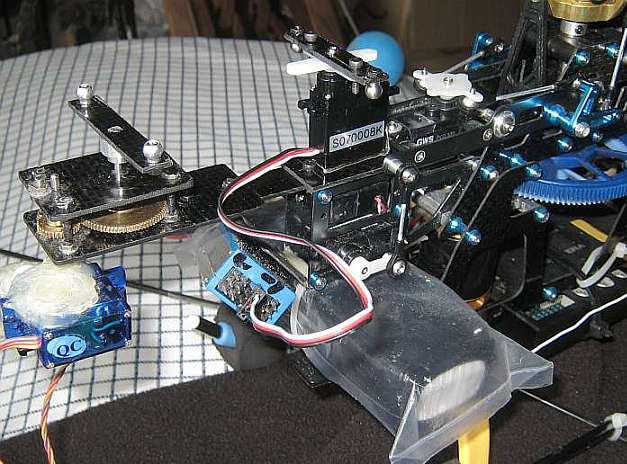
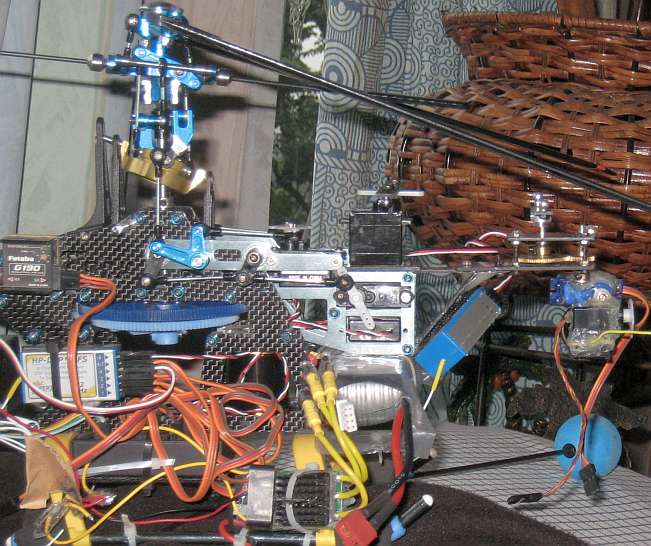 090621
‚‚ف‚ـ‚µ‚½‚إ‚·پB
090621
‚‚ف‚ـ‚µ‚½‚إ‚·پB
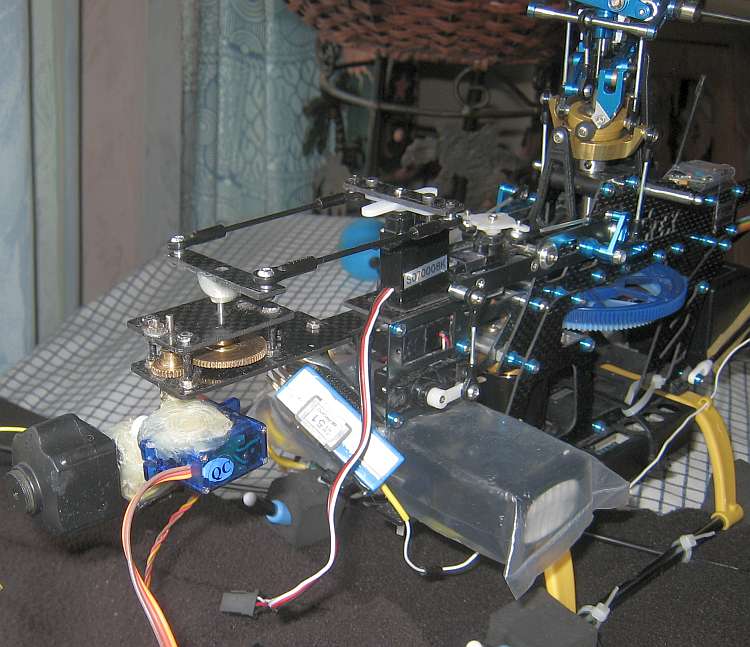 ‚إ‚àپAƒLƒڈƒhƒC‚©‚à‚إ‚·پB
’ل‚¢ƒTپ[ƒ{‚ة‚µ‚ؤ‘O•û‚جƒAپ[ƒ€‚ًڈم‰؛‚ذ‚ء‚‚è•ش‚µ‚ؤƒJƒ‰پ[‚ج‰؛‚ةژ‚ء‚ؤچs‚¯‚ê‚خپcپA
‚إ‚àپAƒLƒڈƒhƒC‚©‚à‚إ‚·پB
’ل‚¢ƒTپ[ƒ{‚ة‚µ‚ؤ‘O•û‚جƒAپ[ƒ€‚ًڈم‰؛‚ذ‚ء‚‚è•ش‚µ‚ؤƒJƒ‰پ[‚ج‰؛‚ةژ‚ء‚ؤچs‚¯‚ê‚خپcپA
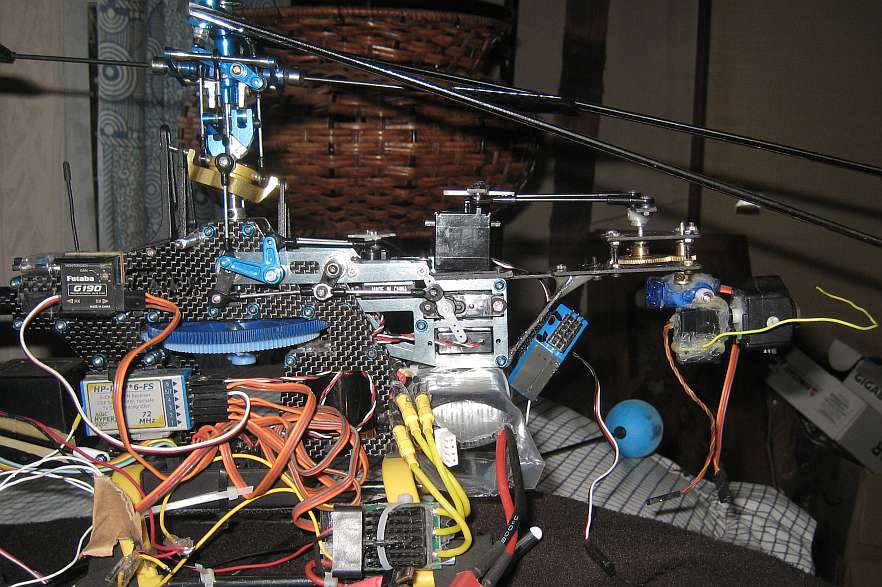 چX‚ةپA
چX‚ةپA
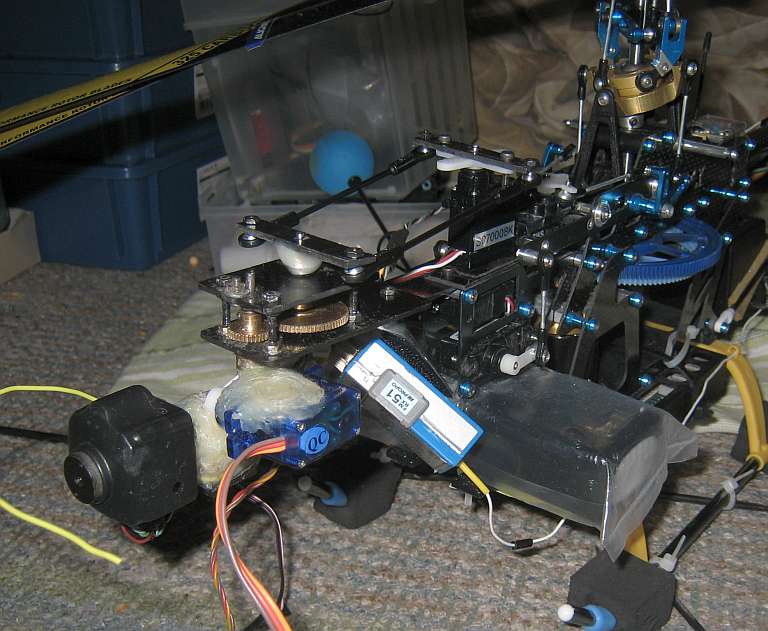

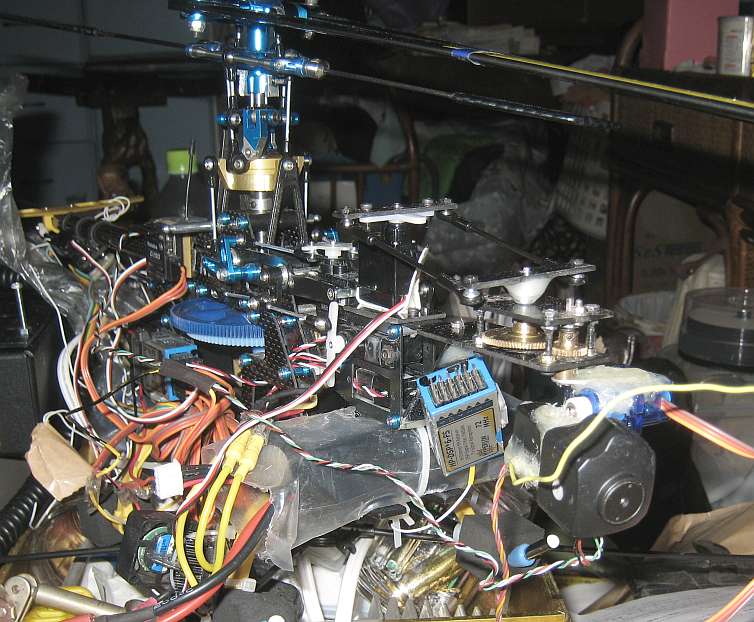 090622
—]‚ء‚½ƒtƒHƒgƒCƒ“ƒ^ƒ‰ƒvƒ^‚إ‰ٌ“]گ”Œv‚ً‚آ‚‚è‚ـ‚µ‚½پB
S/N‚âƒQƒCƒ“‚àڈ\•ھ‚ج‚و‚¤‚إ‚·پB
ƒIƒVƒچ‚âPC‚ج‰¹گ؛“ü—ح‚إژg‚¦‚ـ‚·پB
090622
—]‚ء‚½ƒtƒHƒgƒCƒ“ƒ^ƒ‰ƒvƒ^‚إ‰ٌ“]گ”Œv‚ً‚آ‚‚è‚ـ‚µ‚½پB
S/N‚âƒQƒCƒ“‚àڈ\•ھ‚ج‚و‚¤‚إ‚·پB
ƒIƒVƒچ‚âPC‚ج‰¹گ؛“ü—ح‚إژg‚¦‚ـ‚·پB
 ‹َژB‚ة‚حگU“®‚ھ—م‹N‚³‚ê‚éڈêچ‡‚à‚ ‚é‚ج‚إپA‚؟‚ه‚ء‚ئ‚¾‚¯•‚‚©‚¹‚ؤŒ©‚ـ‚µ‚½پB
ƒ‚پ[ƒ^پ[‹ى“®ژ‚ة“d”g‚ة‰e‹؟‚ھ‚إ‚ؤ‚¨‚è‚ـ‚·‚ھ
‹َژB‚ة‚حگU“®‚ھ—م‹N‚³‚ê‚éڈêچ‡‚à‚ ‚é‚ج‚إپA‚؟‚ه‚ء‚ئ‚¾‚¯•‚‚©‚¹‚ؤŒ©‚ـ‚µ‚½پB
ƒ‚پ[ƒ^پ[‹ى“®ژ‚ة“d”g‚ة‰e‹؟‚ھ‚إ‚ؤ‚¨‚è‚ـ‚·‚ھ
 پ@پƒT-Rex450‚ج‹َژB“I•‚ڈمگU“®ƒeƒXƒg
ƒŒƒ“ƒY‚جژûچ·‚ح‘ه•د‚إ‚·‚ج‚إپA–¾‚é‚¢“ْ‚ةƒsƒ“ƒzپ[ƒ‹‚إژB‰eپH
‘½ڈ‚جƒmƒCƒY‘خچô‚àچl—¶پBپƒƒRƒ‚ƒ“ƒ‚پ[ƒhپB
090624
‰ٌ“]گ”‘ھ’è‚حپAƒeپ[ƒ‹ƒچپ[ƒ^پ[‚ة‚µ‚ؤŒ©‚ـ‚·پB
پ@پƒT-Rex450‚ج‹َژB“I•‚ڈمگU“®ƒeƒXƒg
ƒŒƒ“ƒY‚جژûچ·‚ح‘ه•د‚إ‚·‚ج‚إپA–¾‚é‚¢“ْ‚ةƒsƒ“ƒzپ[ƒ‹‚إژB‰eپH
‘½ڈ‚جƒmƒCƒY‘خچô‚àچl—¶پBپƒƒRƒ‚ƒ“ƒ‚پ[ƒhپB
090624
‰ٌ“]گ”‘ھ’è‚حپAƒeپ[ƒ‹ƒچپ[ƒ^پ[‚ة‚µ‚ؤŒ©‚ـ‚·پB
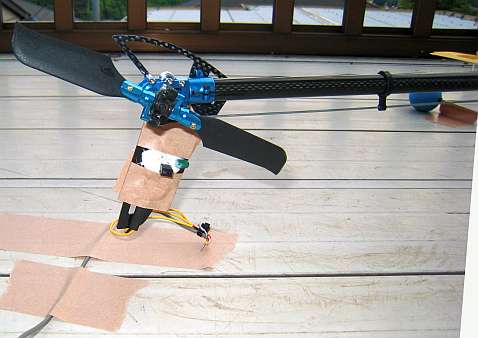 ڈcژ²پF0.1V/Div
‰،ژ²پF2mSec/Div
ڈcژ²پF0.1V/Div
‰،ژ²پF2mSec/Div
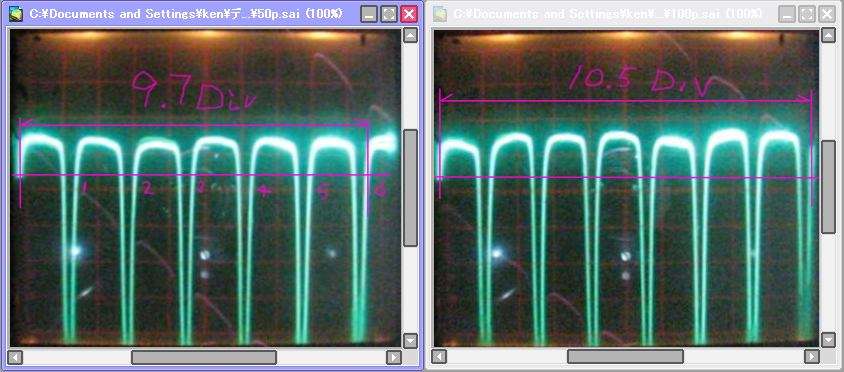 ƒپƒCƒ“ƒچپ[ƒ^پ[‚ئƒeپ[ƒ‹‚جƒMƒ„”ن1پF4.95
ƒRƒŒƒNƒeƒBƒuƒXƒeƒBƒbƒN’†—§پFƒXƒچƒbƒgƒ‹60%
6‰ٌ“]9.7Div
309Hzپ¨18556rpm
ƒeپ[ƒ‹ƒچپ[ƒ^پ[‰ٌ“]گ”پپ9278rpm
ƒپƒCƒ“ƒچپ[ƒ^پ[‰ٌ“]گ”پپ1874rpm
ƒ‚پ[ƒ^پ[‰ٌ“]گ”پپ25554rpm
ƒRƒŒƒNƒeƒBƒuƒXƒeƒBƒbƒNFullUPپFƒXƒچƒbƒgƒ‹92.5%
7‰ٌ“]10.5Div
333Hzپ¨20000rpm
ƒeپ[ƒ‹ƒچپ[ƒ^پ[‰ٌ“]گ”پپ10000rpm
ƒپƒCƒ“ƒچپ[ƒ^پ[‰ٌ“]گ”پپ2020rpm
ƒ‚پ[ƒ^پ[‰ٌ“]گ”پپ27545rpmپ@پƒژلٹ±‰ك•‰‰×‹C–،پH
360‚ئ325ƒچپ[ƒ^پ[‚ج”نٹrپB
ƒeپ[ƒ‹‚ھگL‚ر‚ؤ‚¢‚邾‚¯360‚ج‚ظ‚¤‚ھƒoƒ‰ƒ“ƒX‚ھ—ا‚Œ©‚¦‚é‚إ‚·پB
ƒeپ[ƒ‹ƒuƒŒپ[ƒh‚àژلٹ±’·‚¢‚ج‚ًپB
ƒeپ[ƒ‹ƒچپ[ƒ^پ[‚جƒuƒŒپ[ƒhگ”UP
ƒپƒCƒ“ƒچپ[ƒ^پ[‚ئƒeپ[ƒ‹‚جƒMƒ„”ن1پF4.95
ƒRƒŒƒNƒeƒBƒuƒXƒeƒBƒbƒN’†—§پFƒXƒچƒbƒgƒ‹60%
6‰ٌ“]9.7Div
309Hzپ¨18556rpm
ƒeپ[ƒ‹ƒچپ[ƒ^پ[‰ٌ“]گ”پپ9278rpm
ƒپƒCƒ“ƒچپ[ƒ^پ[‰ٌ“]گ”پپ1874rpm
ƒ‚پ[ƒ^پ[‰ٌ“]گ”پپ25554rpm
ƒRƒŒƒNƒeƒBƒuƒXƒeƒBƒbƒNFullUPپFƒXƒچƒbƒgƒ‹92.5%
7‰ٌ“]10.5Div
333Hzپ¨20000rpm
ƒeپ[ƒ‹ƒچپ[ƒ^پ[‰ٌ“]گ”پپ10000rpm
ƒپƒCƒ“ƒچپ[ƒ^پ[‰ٌ“]گ”پپ2020rpm
ƒ‚پ[ƒ^پ[‰ٌ“]گ”پپ27545rpmپ@پƒژلٹ±‰ك•‰‰×‹C–،پH
360‚ئ325ƒچپ[ƒ^پ[‚ج”نٹrپB
ƒeپ[ƒ‹‚ھگL‚ر‚ؤ‚¢‚邾‚¯360‚ج‚ظ‚¤‚ھƒoƒ‰ƒ“ƒX‚ھ—ا‚Œ©‚¦‚é‚إ‚·پB
ƒeپ[ƒ‹ƒuƒŒپ[ƒh‚àژلٹ±’·‚¢‚ج‚ًپB
ƒeپ[ƒ‹ƒچپ[ƒ^پ[‚جƒuƒŒپ[ƒhگ”UP
 ”ٍ‚خ‚µ‚ؤ‚ف‚½‚ئ‚±‚ëپA
ڈd—ت‚جƒoƒ‰ƒ“ƒX‚ئƒsƒbƒ`‚جٹضŒW‚ح‚ئ‚ء‚ؤ‚à‚¢‚¢ٹ´‚¶‚ج‚و‚¤‚إ‚·پB
ƒeپ[ƒ‹‚ج–â‘è‚à‹t‚ةژû‚ـ‚è‚ـ‚·پB
ƒwƒbƒhƒچƒbƒNƒWƒƒƒCƒچ‚حƒnƒ“ƒ`ƒ“ƒO‚à‹N‚±‚炸چ‚گ«”\‚إ‚·‚ھپA
”ن—لگ§Œن‚إ‚ح‚ب‚¢‚½‚ك‚©ƒeپ[ƒ‹‚ج‹@•q‚³‚ھ‚ئ‚ؤ‚آ‚à‚ب‚¢‚و‚¤‚بپcپAپ@پƒٹµ‚ê‚ê‚خ‚ا‚¤‚ة‚©‚ب‚è‚»‚¤‚إ‚·پB
پEگVˆؤ
چLٹpƒŒƒ“ƒY‚إژB‰e‚µ‚½‚ج‚ًƒ‚ƒjƒ^‚ة“ٹ‰e‚µ‚½‚çپA“ھ‚ج“®‚©‚·ٹp“x‚ھŒ¸‚éپB
چLٹpƒJƒپƒ‰‚إ‹·ٹp‚بƒZƒ“ƒT‚إٹp“x‚جٹg‘هپ¨TracJ-IR‚ھƒ}ƒgƒ‚‚ةژg‚¦‚éپH
ƒmƒCƒY‘خچôŒمپA‘ه‘جŒˆ‚ـ‚ء‚½‚çƒPپ[ƒuƒ‹‚ًŒإ’肵‚ـ‚·پB
‚إپA
‚؟‚ه‚ء‚ئژB‰e‚µ‚ؤŒ©‚½‚¢‚إ‚·پB
ƒsƒ“ƒzپ[ƒ‹ƒŒƒ“ƒY‚ة‚ؤƒwƒbƒhƒgƒ‰ƒbƒN‚جƒfƒ‚‚àپB
ƒAƒCƒŒƒxƒ‹‚و‚ë‚؟‚ه‚ء‚ئچ‚‚¢’ِ“x‚ةڈم‚°‚ؤ‚ف‚ـ‚µ‚½‚إ‚·پB
“®‰و‚جژَگMڈَ‘ش‚ھˆ«‚©‚ء‚½‚ج‚إƒXƒNƒٹپ[ƒ“ƒVƒ‡ƒbƒg‚إ‚·پB
”ٍ‚خ‚µ‚ؤ‚ف‚½‚ئ‚±‚ëپA
ڈd—ت‚جƒoƒ‰ƒ“ƒX‚ئƒsƒbƒ`‚جٹضŒW‚ح‚ئ‚ء‚ؤ‚à‚¢‚¢ٹ´‚¶‚ج‚و‚¤‚إ‚·پB
ƒeپ[ƒ‹‚ج–â‘è‚à‹t‚ةژû‚ـ‚è‚ـ‚·پB
ƒwƒbƒhƒچƒbƒNƒWƒƒƒCƒچ‚حƒnƒ“ƒ`ƒ“ƒO‚à‹N‚±‚炸چ‚گ«”\‚إ‚·‚ھپA
”ن—لگ§Œن‚إ‚ح‚ب‚¢‚½‚ك‚©ƒeپ[ƒ‹‚ج‹@•q‚³‚ھ‚ئ‚ؤ‚آ‚à‚ب‚¢‚و‚¤‚بپcپAپ@پƒٹµ‚ê‚ê‚خ‚ا‚¤‚ة‚©‚ب‚è‚»‚¤‚إ‚·پB
پEگVˆؤ
چLٹpƒŒƒ“ƒY‚إژB‰e‚µ‚½‚ج‚ًƒ‚ƒjƒ^‚ة“ٹ‰e‚µ‚½‚çپA“ھ‚ج“®‚©‚·ٹp“x‚ھŒ¸‚éپB
چLٹpƒJƒپƒ‰‚إ‹·ٹp‚بƒZƒ“ƒT‚إٹp“x‚جٹg‘هپ¨TracJ-IR‚ھƒ}ƒgƒ‚‚ةژg‚¦‚éپH
ƒmƒCƒY‘خچôŒمپA‘ه‘جŒˆ‚ـ‚ء‚½‚çƒPپ[ƒuƒ‹‚ًŒإ’肵‚ـ‚·پB
‚إپA
‚؟‚ه‚ء‚ئژB‰e‚µ‚ؤŒ©‚½‚¢‚إ‚·پB
ƒsƒ“ƒzپ[ƒ‹ƒŒƒ“ƒY‚ة‚ؤƒwƒbƒhƒgƒ‰ƒbƒN‚جƒfƒ‚‚àپB
ƒAƒCƒŒƒxƒ‹‚و‚ë‚؟‚ه‚ء‚ئچ‚‚¢’ِ“x‚ةڈم‚°‚ؤ‚ف‚ـ‚µ‚½‚إ‚·پB
“®‰و‚جژَگMڈَ‘ش‚ھˆ«‚©‚ء‚½‚ج‚إƒXƒNƒٹپ[ƒ“ƒVƒ‡ƒbƒg‚إ‚·پB
 ژ‚؟ڈم‚°”\—حŒüڈم‚ج‚½‚ك‚ة‚حپA‰ٌ“]گ”‚ًڈم‚°‚é‚©پAƒsƒbƒ`‚ئƒXƒچƒbƒgƒ‹‚ًڈم‚°‚邵‚©‚ ‚è‚ـ‚¹‚ٌ‚ثپB
‚»‚±‚إƒMƒ„‚ً11T‚©‚ç12T‚ةڈم‚°‚ـ‚µ‚½پB
‚آ‚¢‚إ‚ةƒwƒbƒhژü‚è‚ًV2—p‚ج‚ةگV’²‚µ‚ؤچd‚ك‚جƒ_ƒ“ƒpپ[‚ة‚µ‚ـ‚µ‚½پB
‚·‚é‚ئپAƒwƒbƒh‚ج‰e‹؟‚à‚ ‚é‚ئ‚حژv‚¤‚ج‚إ‚·‚ھپA
‚ئ‚ة‚©‚‰ٌ“]گ”‚ھڈم‚ھ‚ء‚ؤ‹@•q‚ة‚ب‚è‚·‚¬‚ؤ‚µ‚ـ‚¢‚ـ‚µ‚½پB
ƒzƒoƒٹƒ“ƒOƒXƒچƒbƒgƒ‹‚ً‰؛‚°‚ؤƒzƒoƒٹƒ“ƒOƒsƒbƒ`‚ًڈم‚°‚½‚çچ¶‰ٌ‚è‚ًژn‚ك‚ـ‚µ‚½پB
‚و‚Œ©‚ؤ‚ف‚é‚ئپAƒ‰ƒ_پ[‚ح‰E‚ةچs‚«‚«‚ء‚ؤ‚¢‚é‚ي‚¯‚إ‚à‚ب‚©‚ء‚½‚ج‚إپA
ƒWƒƒƒCƒچ‚ًƒٹƒZƒbƒg‚µ‚½‚ç’¼‚è‚ـ‚µ‚½پB
‚»‚ê‚إ‚à‹@•q‚ب‚ج‚إƒsƒbƒ`‚ئƒXƒچƒbƒgƒ‹‚ًژلٹ±ƒ‚ƒg‚جڈَ‘ش‚ة–ك‚µ‚ؤ
D/R‚ً60پ“‚ة‰؛‚°‚ؤپAEXP‚ً27‚ةڈمڈ¸‚³‚¹‚ؤ‚ف‚ـ‚µ‚½پB
ژOژ²ƒWƒƒƒCƒچ‚جٹ´“x‚ً‚à‚ء‚ئڈم‚°‚ê‚خ‘ا‚جگط‚êچ‚ف‚ً—}‚¦‚ç‚ê‚»‚¤‚إ‚·پB
‘OŒم‚ة‚آ‚ٌ‚ج‚ك‚é‚و‚¤‚ب‘ا‚جگط‚êچ‚ف‚جŒ´ˆِ‚حپA
ƒGƒŒƒxپ[ƒ^پ[‚جƒWƒƒƒCƒچ‚ھ”½‘خ•ûŒü‚ةگف’肳‚ê‚ؤ‚½‚ج‚ھŒ´ˆِ‚إ‚µ‚½پB
ژ‚؟ڈم‚°”\—حŒüڈم‚ج‚½‚ك‚ة‚حپA‰ٌ“]گ”‚ًڈم‚°‚é‚©پAƒsƒbƒ`‚ئƒXƒچƒbƒgƒ‹‚ًڈم‚°‚邵‚©‚ ‚è‚ـ‚¹‚ٌ‚ثپB
‚»‚±‚إƒMƒ„‚ً11T‚©‚ç12T‚ةڈم‚°‚ـ‚µ‚½پB
‚آ‚¢‚إ‚ةƒwƒbƒhژü‚è‚ًV2—p‚ج‚ةگV’²‚µ‚ؤچd‚ك‚جƒ_ƒ“ƒpپ[‚ة‚µ‚ـ‚µ‚½پB
‚·‚é‚ئپAƒwƒbƒh‚ج‰e‹؟‚à‚ ‚é‚ئ‚حژv‚¤‚ج‚إ‚·‚ھپA
‚ئ‚ة‚©‚‰ٌ“]گ”‚ھڈم‚ھ‚ء‚ؤ‹@•q‚ة‚ب‚è‚·‚¬‚ؤ‚µ‚ـ‚¢‚ـ‚µ‚½پB
ƒzƒoƒٹƒ“ƒOƒXƒچƒbƒgƒ‹‚ً‰؛‚°‚ؤƒzƒoƒٹƒ“ƒOƒsƒbƒ`‚ًڈم‚°‚½‚çچ¶‰ٌ‚è‚ًژn‚ك‚ـ‚µ‚½پB
‚و‚Œ©‚ؤ‚ف‚é‚ئپAƒ‰ƒ_پ[‚ح‰E‚ةچs‚«‚«‚ء‚ؤ‚¢‚é‚ي‚¯‚إ‚à‚ب‚©‚ء‚½‚ج‚إپA
ƒWƒƒƒCƒچ‚ًƒٹƒZƒbƒg‚µ‚½‚ç’¼‚è‚ـ‚µ‚½پB
‚»‚ê‚إ‚à‹@•q‚ب‚ج‚إƒsƒbƒ`‚ئƒXƒچƒbƒgƒ‹‚ًژلٹ±ƒ‚ƒg‚جڈَ‘ش‚ة–ك‚µ‚ؤ
D/R‚ً60پ“‚ة‰؛‚°‚ؤپAEXP‚ً27‚ةڈمڈ¸‚³‚¹‚ؤ‚ف‚ـ‚µ‚½پB
ژOژ²ƒWƒƒƒCƒچ‚جٹ´“x‚ً‚à‚ء‚ئڈم‚°‚ê‚خ‘ا‚جگط‚êچ‚ف‚ً—}‚¦‚ç‚ê‚»‚¤‚إ‚·پB
‘OŒم‚ة‚آ‚ٌ‚ج‚ك‚é‚و‚¤‚ب‘ا‚جگط‚êچ‚ف‚جŒ´ˆِ‚حپA
ƒGƒŒƒxپ[ƒ^پ[‚جƒWƒƒƒCƒچ‚ھ”½‘خ•ûŒü‚ةگف’肳‚ê‚ؤ‚½‚ج‚ھŒ´ˆِ‚إ‚µ‚½پB
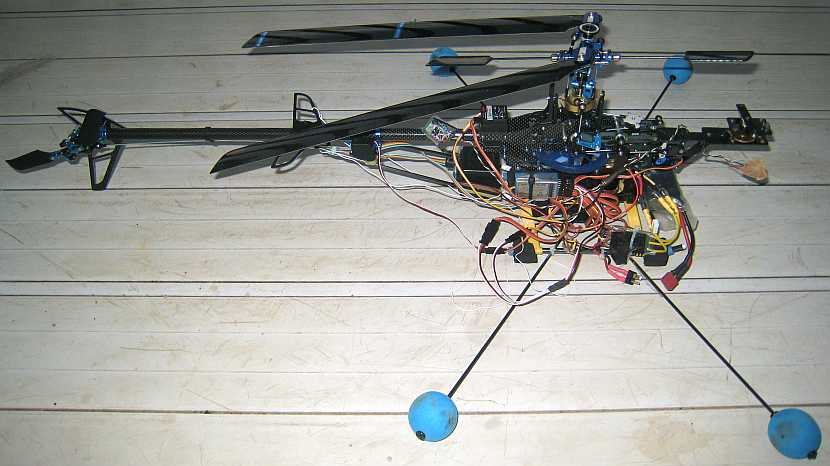
 090711
ƒnپ[ƒtƒgƒٹƒKپ[‚ًƒvƒچƒ|‚ة‘—‚éSW‚ئ‰ٌکHپB
ƒJƒپƒ‰‚جƒZƒ“ƒ^پ[ƒٹƒ^پ[ƒ“SW‚ًƒvƒچƒ|‚ة‘—‚é‰ٌکHپB
090711
ƒnپ[ƒtƒgƒٹƒKپ[‚ًƒvƒچƒ|‚ة‘—‚éSW‚ئ‰ٌکHپB
ƒJƒپƒ‰‚جƒZƒ“ƒ^پ[ƒٹƒ^پ[ƒ“SW‚ًƒvƒچƒ|‚ة‘—‚é‰ٌکHپB
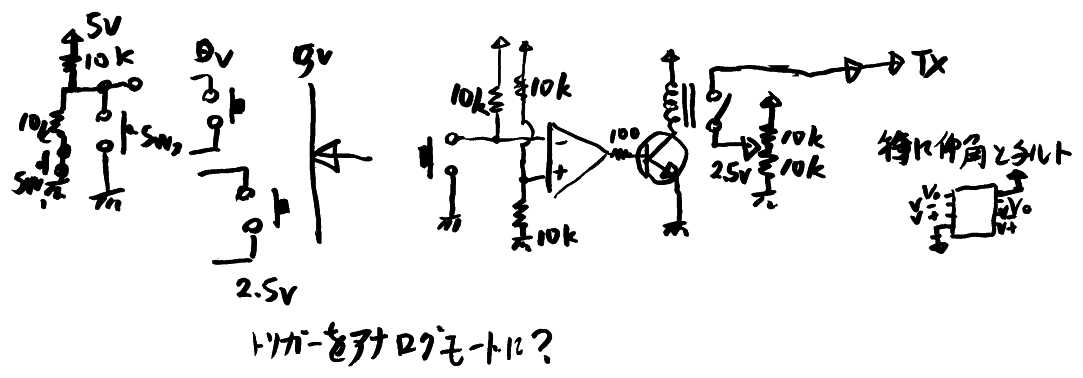 ƒnپ[ƒtƒgƒٹƒKپ[‚ج‹ى“®‘¤‚إ‚·پB
ƒnپ[ƒtƒgƒٹƒKپ[‚ج‹ى“®‘¤‚إ‚·پB
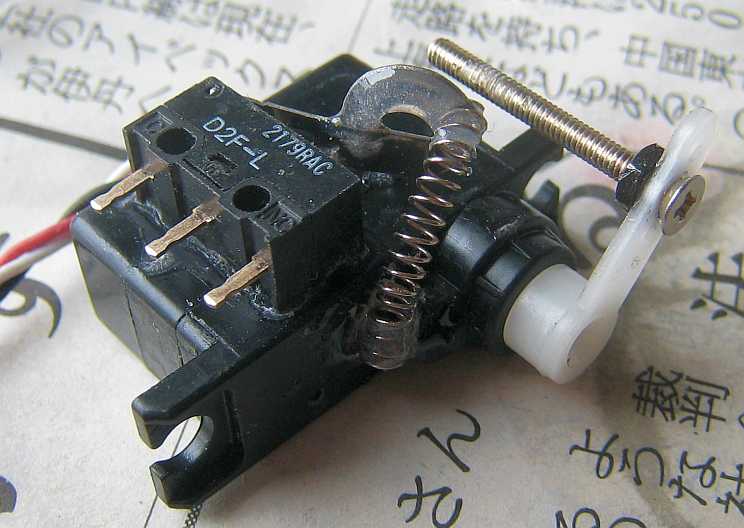 چ¶‚©‚çپA
OFF
ƒnپ[ƒtپF‹à‘®‚ھگعگG‚µ‚ؤپAƒYپ[ƒ€‚µ‚ؤƒNƒچƒXƒ‰ƒCƒ“‚ھڈo‚éپB
ONپFƒ}ƒCƒNƒچSW‚ھ‰ں‚³‚ê‚ؤŒƒ”پB
چ¶‚©‚çپA
OFF
ƒnپ[ƒtپF‹à‘®‚ھگعگG‚µ‚ؤپAƒYپ[ƒ€‚µ‚ؤƒNƒچƒXƒ‰ƒCƒ“‚ھڈo‚éپB
ONپFƒ}ƒCƒNƒچSW‚ھ‰ں‚³‚ê‚ؤŒƒ”پB
 ‚ظ‚عپA‘S”ُڈd—تپF1100g
‚ ‚ئ‚حƒXƒCƒbƒ`•”•ھ‚إ‚·پB
‚ظ‚عپA‘S”ُڈd—تپF1100g
‚ ‚ئ‚حƒXƒCƒbƒ`•”•ھ‚إ‚·پB
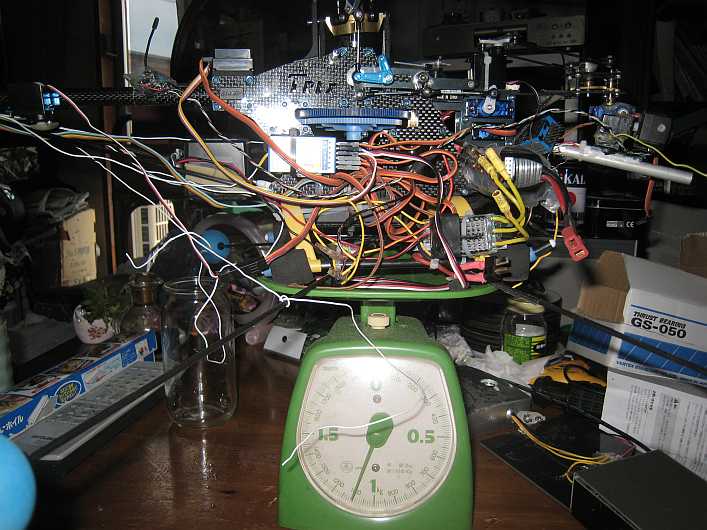 پ@پƒƒچپ[ƒ}ƒEƒ“ƒg
ƒ‚پ[ƒ^پ[‚ج‹ى“®‚حPWM‚جƒfƒ…پ[ƒeƒBپ[”ن‚إ‚·‚©‚çپA
ژ؟—ت‚ئƒXƒچƒbƒgƒ‹‚ھ”ن—ل‚ئ‚µ‚ؤ–عگ¯‚ً•t‚¯‚ؤ‚à‘ه‚«‚ٹO‚ê‚éƒRƒg‚ح–³‚¢‚©‚ئژv‚ي‚ê‚ـ‚·پB
ƒfƒWƒ^ƒ‹ƒTپ[ƒ{‚ھ‚½‚ؤ‘±‚¯‚ة‚R‚آ‰َ‚ê‚ـ‚µ‚½پB
•ûˆتٹp—p‚Q‚آ‚ئƒ‰ƒ_پ[—p‚إ‚·پB
Œ´ˆِ‚حپA‰ك•‰‰×‚إژ©‰َ‚µ‚½‚و‚¤‚إ‚·پB
‚آ‚ـ‚èپAƒfƒWƒ^ƒ‹ƒTپ[ƒ{‚ح‚±‚¤‚¢‚¤ŒXŒü‚ج“ءگ«‚ًژ‚آ‚و‚¤ƒfƒXپB
ƒvƒچƒ|‘¤‚جƒgƒ‰ƒxƒ‹ƒAƒWƒƒƒXƒg‚ب‚ا‚إ‘خڈˆ‚µ‚ؤ‚à•sˆہ‚ھژc‚è‚ـ‚·پB
‚إ
ٹش‚ةچ‡‚ي‚¹‚جˆس–،‚إƒ‰ƒ_پ[‚ةGWS‚جPicoƒTپ[ƒ{‚ً•t‚¯‚ؤˆê•ھ’ِ“x•‚‚©‚¹‚ؤ‚ف‚ؤ‚à
ƒLƒŒƒC‚ةژ~‚ـ‚ء‚ؤ‚¢‚é‚ج‚إپA–â‘è‚ب‚µ‚إ‚·پB
‚à‚ء‚ئˆہ‚¢E-Max‚جƒTپ[ƒ{‚ة‚µ‚½‚إ‚·پB
پ@پƒƒچپ[ƒ}ƒEƒ“ƒg
ƒ‚پ[ƒ^پ[‚ج‹ى“®‚حPWM‚جƒfƒ…پ[ƒeƒBپ[”ن‚إ‚·‚©‚çپA
ژ؟—ت‚ئƒXƒچƒbƒgƒ‹‚ھ”ن—ل‚ئ‚µ‚ؤ–عگ¯‚ً•t‚¯‚ؤ‚à‘ه‚«‚ٹO‚ê‚éƒRƒg‚ح–³‚¢‚©‚ئژv‚ي‚ê‚ـ‚·پB
ƒfƒWƒ^ƒ‹ƒTپ[ƒ{‚ھ‚½‚ؤ‘±‚¯‚ة‚R‚آ‰َ‚ê‚ـ‚µ‚½پB
•ûˆتٹp—p‚Q‚آ‚ئƒ‰ƒ_پ[—p‚إ‚·پB
Œ´ˆِ‚حپA‰ك•‰‰×‚إژ©‰َ‚µ‚½‚و‚¤‚إ‚·پB
‚آ‚ـ‚èپAƒfƒWƒ^ƒ‹ƒTپ[ƒ{‚ح‚±‚¤‚¢‚¤ŒXŒü‚ج“ءگ«‚ًژ‚آ‚و‚¤ƒfƒXپB
ƒvƒچƒ|‘¤‚جƒgƒ‰ƒxƒ‹ƒAƒWƒƒƒXƒg‚ب‚ا‚إ‘خڈˆ‚µ‚ؤ‚à•sˆہ‚ھژc‚è‚ـ‚·پB
‚إ
ٹش‚ةچ‡‚ي‚¹‚جˆس–،‚إƒ‰ƒ_پ[‚ةGWS‚جPicoƒTپ[ƒ{‚ً•t‚¯‚ؤˆê•ھ’ِ“x•‚‚©‚¹‚ؤ‚ف‚ؤ‚à
ƒLƒŒƒC‚ةژ~‚ـ‚ء‚ؤ‚¢‚é‚ج‚إپA–â‘è‚ب‚µ‚إ‚·پB
‚à‚ء‚ئˆہ‚¢E-Max‚جƒTپ[ƒ{‚ة‚µ‚½‚إ‚·پB
 پ@پƒ
‚ب‚ٌ‚¾‚©پA10cm‚à•‚‚©‚ب‚¢‚إ‚·پB
’²‚ׂؤ‚ف‚½‚çچإڈ¬ƒsƒbƒ`‚ھ15پ‹چإ‘هƒsƒbƒ`‚ھƒ}ƒCƒiƒX3پ‹‚¾‚ء‚½‚إ‚·پcپB
ƒgƒٹƒ€‚·‚éCH‚ًٹشˆل‚¦‚½‚ج‚©‚àپB
پ@پƒ
‚ب‚ٌ‚¾‚©پA10cm‚à•‚‚©‚ب‚¢‚إ‚·پB
’²‚ׂؤ‚ف‚½‚çچإڈ¬ƒsƒbƒ`‚ھ15پ‹چإ‘هƒsƒbƒ`‚ھƒ}ƒCƒiƒX3پ‹‚¾‚ء‚½‚إ‚·پcپB
ƒgƒٹƒ€‚·‚éCH‚ًٹشˆل‚¦‚½‚ج‚©‚àپB
 پ@پƒT-Rex450‚ج‹َژB“I•‚ڈمگU“®ƒeƒXƒg
ژv‚ء‚½‚و‚èˆع“®—ت‚ھ‚ي‚©‚è‚â‚·‚¢‚إ‚·پB
+[KDS Fiymentor]+
090812
ƒRƒŒپA’چ•¶‚µ‚½‚إ‚·پB
KDS Fiymentor
پEOFF
پEˆہ’胂پ[ƒh
پEƒ|ƒWƒVƒ‡ƒ“ƒzپ[ƒ‹ƒhƒ‚پ[ƒh
‚ھ‚ ‚é‚ج‚إ‚·‚ھپA
‘خ’nˆع“®—ت‚ً‰و‘œ‰ًگح‚إڈo‚µ‚ؤ‚é‚ج‚إ‚·‚ھپAŒُٹwƒ}ƒEƒX‚ج‹Zڈp‚ئژ—‚ؤ‚éٹ´‚¶‚إ‚·پB
http://www.rc-airstage.com/product_info.php?cPath=5&products_id=4820
ƒzƒoƒٹƒ“ƒO‚ً‚·‚éژ©—¥گ§ŒنŒn‚حگج‚©‚ç•د‚ي‚ç‚ب‚¢‚و‚¤‚إپA
ƒŒپ[ƒ_پ[‚ب‚ا‚إژ©•ھ‚جˆت’u‚ً”Fژ¯‚·‚é‹@”\‚ً‚à‚ء‚ؤ‚¨‚è‚ـ‚·پB
‚±‚ê‚ةŒXژخٹpƒZƒ“ƒTپ[‚ھ’…‚¢‚ؤ‚é‚ج‚ھƒپƒWƒƒپ[‚إ‚·پB
‰ء‘¬“xƒZƒ“ƒTپ[‚à•t‚¯‚ؤ‚éڈêچ‡‚ھ‚ ‚è‚ـ‚·پBپƒ‹°‚ç‚”÷“®‚ة‘خ‚·‚éڈ¬‘ا‚إ‚س‚ç‚آ‚«‚ً”ً‚¯‚邽‚كپB
‰غ‘è‚ئ‚µ‚ؤ‚حپAƒRƒ“ƒgƒ‰ƒXƒg‚ھژم‚©‚ء‚½‚èˆأ‚¢‚ئ‘ت–ع‚إ‚·‚ج‚إپA
“ا‚فژو‚èٹ´“x‚جUP‚âگشٹOگü‚جڈئ–¾‚ئ‚©‚ ‚ء‚ؤپA5m‚‚ç‚¢‚جچ‚‚¢چ‚“x‚إ‚àژg‚¦‚é‚ئژہ—p“I‚ةژv‚¢‚ـ‚·پB
‚±‚ج‹@‘جˆہ’è‘•’u‚جˆê‚آ–ع‚ج‹@”\‚ح‚Rژ²ƒWƒƒƒCƒچ‚©‚ç‚جگMچ†‚ًژٹشگد•ھ‚µ‚½ٹp“x‚ًٹo‚¦‚ؤگ§Œن‚µ‚ـ‚·پB
‚آ‚ـ‚èگ…•½ڈَ‘ش‚ًٹo‚¦‚³‚¹‚é•K—p‚ھ‚ ‚è‚ـ‚·پBپ@پƒƒzƒٹƒ]ƒiƒ‹ƒ‚پ[ƒhپ@(CCD‚حƒ|ƒWƒVƒ‡ƒ“ƒ‚پ[ƒh)
•‚ڈم‘O‚ةٹo‚¦‚³‚¹‚½‚çƒgƒٹƒ€‚إ’²گ®‚µ‚ؤژ~‚ك‚邱‚ئ‚ھڈo—ˆ‚ـ‚·‚ھپA
ƒWƒƒƒCƒچ‚جƒ‚پ[ƒh‚ً•د‚¦‚ؤ‚±‚ج‹@”\‚ًگط‚ء‚½ڈَ‘ش‚©‚ç–ك‚·‚é‚ئ‚«‚ة‚حپA
‹@‘ج‚ًگ…•½ƒzƒoƒٹƒ“ƒOڈَ‘ش‚ة–ك‚µ‚ؤ‚©‚ç‚إ‚·پB
‚½‚¾‚µ‚Œƒ|ƒWƒVƒ‡ƒ“ƒZƒ“ƒTپ[‚ة‚و‚ء‚ؤ‚µ‚خ‚炉،ٹٹ‚肵‚½‚çژ~‚ـ‚é‚ج‚©‚à’m‚ê‚ـ‚¹‚ٌپB
Œ»چفپAƒXƒeƒBƒbƒN‚ج‘ا‚ھ‹@•q‚ة—ک‚«‚·‚¬‚ؤ‚ـ‚·پB
‚ب‚¨پAŒXژخٹp‚ج‚ف‚ب‚ç‚خپAƒپƒJƒjƒJƒ‹‚بƒtƒٹپ[ƒWƒƒƒCƒچ‚ج•û‚ھ‰”’¼‰؛Œü‚«‚ًŒ©‚¢‚¾‚¹‚ـ‚·‚ج‚إ—ا‚¢‚©‚ئژv‚ي‚ê‚ـ‚·پB
‚»‚ê‚حپAƒLپ[ƒGƒ“ƒX‚جƒŒƒ{ƒٹƒ…پ[ƒ^پ[‚ئ“¯‚¶‚ةپA
ƒzƒoƒٹƒ“ƒO‚ح‰Eژخ‚ك‚إ‚ ‚é‚©‚ç‹@‘ج‚ً‰Eژخ‚ك‚جڈَ‘ش‚إŒX‚¯‚ؤ‚¨‚¢‚ؤپAƒWƒƒƒCƒچ‚حگ…•½‚ة‚ب‚ء‚ؤƒZƒ“ƒ^پ[‚جگMچ†‚ھ‘—‚ç‚ê‚é‚و‚¤‚ة‚µ‚½•û‚ھ—ا‚¢‚إ‚·پB
“¯ژ²”½“]‚جˆہ’èپ«
+[ƒtƒٹپ[ƒXƒsƒٹƒbƒg“™]+
‚إ‚·‚ھپAƒtƒcƒE‚جƒwƒٹ‚ةˆہ’è‘•’u‚ً•t‚¯‚ؤ‚à•‚ڈمژ‚ة‰،ٹٹ‚è‚ھ”ً‚¯‚ç‚ê‚ـ‚¹‚ٌپA
‚و‚ء‚ؤپA’n–ت‚ً•ك‚炦‚é•K—vگ«‚ھ‘أ“–گ«‚ًژ‚ء‚ؤ‚é‰آ”\گ«‚ح‘ه‚«‚¢‚إ‚·‚ثپB
090904
گف’è‚ً•دچX‚µ‚ؤ
”ٍچs’†‚جƒgƒٹƒ€’²گ®‚à‚µ‚½‚當ژڑ’ت‚è‚جƒ‰ƒN‚³‚ة‹ك‚‚ب‚è‚ـ‚µ‚½پB
‚½‚¾پA•‚‚«ڈم‚ھ‚éڈuٹش‚ح’تڈي‚جƒwƒٹ‚و‚è’n–ت‚ة‹z‚¢•t‚‚و‚¤‚ة“]“|ژd—l‚ئ‚µ‚ـ‚·‚ج‚إƒAƒپƒ“ƒ{‚ھ•Kگ{‚إ‚·پB
پ@پƒT-Rex450‚ج‹َژB“I•‚ڈمگU“®ƒeƒXƒg
ژv‚ء‚½‚و‚èˆع“®—ت‚ھ‚ي‚©‚è‚â‚·‚¢‚إ‚·پB
+[KDS Fiymentor]+
090812
ƒRƒŒپA’چ•¶‚µ‚½‚إ‚·پB
KDS Fiymentor
پEOFF
پEˆہ’胂پ[ƒh
پEƒ|ƒWƒVƒ‡ƒ“ƒzپ[ƒ‹ƒhƒ‚پ[ƒh
‚ھ‚ ‚é‚ج‚إ‚·‚ھپA
‘خ’nˆع“®—ت‚ً‰و‘œ‰ًگح‚إڈo‚µ‚ؤ‚é‚ج‚إ‚·‚ھپAŒُٹwƒ}ƒEƒX‚ج‹Zڈp‚ئژ—‚ؤ‚éٹ´‚¶‚إ‚·پB
http://www.rc-airstage.com/product_info.php?cPath=5&products_id=4820
ƒzƒoƒٹƒ“ƒO‚ً‚·‚éژ©—¥گ§ŒنŒn‚حگج‚©‚ç•د‚ي‚ç‚ب‚¢‚و‚¤‚إپA
ƒŒپ[ƒ_پ[‚ب‚ا‚إژ©•ھ‚جˆت’u‚ً”Fژ¯‚·‚é‹@”\‚ً‚à‚ء‚ؤ‚¨‚è‚ـ‚·پB
‚±‚ê‚ةŒXژخٹpƒZƒ“ƒTپ[‚ھ’…‚¢‚ؤ‚é‚ج‚ھƒپƒWƒƒپ[‚إ‚·پB
‰ء‘¬“xƒZƒ“ƒTپ[‚à•t‚¯‚ؤ‚éڈêچ‡‚ھ‚ ‚è‚ـ‚·پBپƒ‹°‚ç‚”÷“®‚ة‘خ‚·‚éڈ¬‘ا‚إ‚س‚ç‚آ‚«‚ً”ً‚¯‚邽‚كپB
‰غ‘è‚ئ‚µ‚ؤ‚حپAƒRƒ“ƒgƒ‰ƒXƒg‚ھژم‚©‚ء‚½‚èˆأ‚¢‚ئ‘ت–ع‚إ‚·‚ج‚إپA
“ا‚فژو‚èٹ´“x‚جUP‚âگشٹOگü‚جڈئ–¾‚ئ‚©‚ ‚ء‚ؤپA5m‚‚ç‚¢‚جچ‚‚¢چ‚“x‚إ‚àژg‚¦‚é‚ئژہ—p“I‚ةژv‚¢‚ـ‚·پB
‚±‚ج‹@‘جˆہ’è‘•’u‚جˆê‚آ–ع‚ج‹@”\‚ح‚Rژ²ƒWƒƒƒCƒچ‚©‚ç‚جگMچ†‚ًژٹشگد•ھ‚µ‚½ٹp“x‚ًٹo‚¦‚ؤگ§Œن‚µ‚ـ‚·پB
‚آ‚ـ‚èگ…•½ڈَ‘ش‚ًٹo‚¦‚³‚¹‚é•K—p‚ھ‚ ‚è‚ـ‚·پBپ@پƒƒzƒٹƒ]ƒiƒ‹ƒ‚پ[ƒhپ@(CCD‚حƒ|ƒWƒVƒ‡ƒ“ƒ‚پ[ƒh)
•‚ڈم‘O‚ةٹo‚¦‚³‚¹‚½‚çƒgƒٹƒ€‚إ’²گ®‚µ‚ؤژ~‚ك‚邱‚ئ‚ھڈo—ˆ‚ـ‚·‚ھپA
ƒWƒƒƒCƒچ‚جƒ‚پ[ƒh‚ً•د‚¦‚ؤ‚±‚ج‹@”\‚ًگط‚ء‚½ڈَ‘ش‚©‚ç–ك‚·‚é‚ئ‚«‚ة‚حپA
‹@‘ج‚ًگ…•½ƒzƒoƒٹƒ“ƒOڈَ‘ش‚ة–ك‚µ‚ؤ‚©‚ç‚إ‚·پB
‚½‚¾‚µ‚Œƒ|ƒWƒVƒ‡ƒ“ƒZƒ“ƒTپ[‚ة‚و‚ء‚ؤ‚µ‚خ‚炉،ٹٹ‚肵‚½‚çژ~‚ـ‚é‚ج‚©‚à’m‚ê‚ـ‚¹‚ٌپB
Œ»چفپAƒXƒeƒBƒbƒN‚ج‘ا‚ھ‹@•q‚ة—ک‚«‚·‚¬‚ؤ‚ـ‚·پB
‚ب‚¨پAŒXژخٹp‚ج‚ف‚ب‚ç‚خپAƒپƒJƒjƒJƒ‹‚بƒtƒٹپ[ƒWƒƒƒCƒچ‚ج•û‚ھ‰”’¼‰؛Œü‚«‚ًŒ©‚¢‚¾‚¹‚ـ‚·‚ج‚إ—ا‚¢‚©‚ئژv‚ي‚ê‚ـ‚·پB
‚»‚ê‚حپAƒLپ[ƒGƒ“ƒX‚جƒŒƒ{ƒٹƒ…پ[ƒ^پ[‚ئ“¯‚¶‚ةپA
ƒzƒoƒٹƒ“ƒO‚ح‰Eژخ‚ك‚إ‚ ‚é‚©‚ç‹@‘ج‚ً‰Eژخ‚ك‚جڈَ‘ش‚إŒX‚¯‚ؤ‚¨‚¢‚ؤپAƒWƒƒƒCƒچ‚حگ…•½‚ة‚ب‚ء‚ؤƒZƒ“ƒ^پ[‚جگMچ†‚ھ‘—‚ç‚ê‚é‚و‚¤‚ة‚µ‚½•û‚ھ—ا‚¢‚إ‚·پB
“¯ژ²”½“]‚جˆہ’èپ«
+[ƒtƒٹپ[ƒXƒsƒٹƒbƒg“™]+
‚إ‚·‚ھپAƒtƒcƒE‚جƒwƒٹ‚ةˆہ’è‘•’u‚ً•t‚¯‚ؤ‚à•‚ڈمژ‚ة‰،ٹٹ‚è‚ھ”ً‚¯‚ç‚ê‚ـ‚¹‚ٌپA
‚و‚ء‚ؤپA’n–ت‚ً•ك‚炦‚é•K—vگ«‚ھ‘أ“–گ«‚ًژ‚ء‚ؤ‚é‰آ”\گ«‚ح‘ه‚«‚¢‚إ‚·‚ثپB
090904
گف’è‚ً•دچX‚µ‚ؤ
”ٍچs’†‚جƒgƒٹƒ€’²گ®‚à‚µ‚½‚當ژڑ’ت‚è‚جƒ‰ƒN‚³‚ة‹ك‚‚ب‚è‚ـ‚µ‚½پB
‚½‚¾پA•‚‚«ڈم‚ھ‚éڈuٹش‚ح’تڈي‚جƒwƒٹ‚و‚è’n–ت‚ة‹z‚¢•t‚‚و‚¤‚ة“]“|ژd—l‚ئ‚µ‚ـ‚·‚ج‚إƒAƒپƒ“ƒ{‚ھ•Kگ{‚إ‚·پB
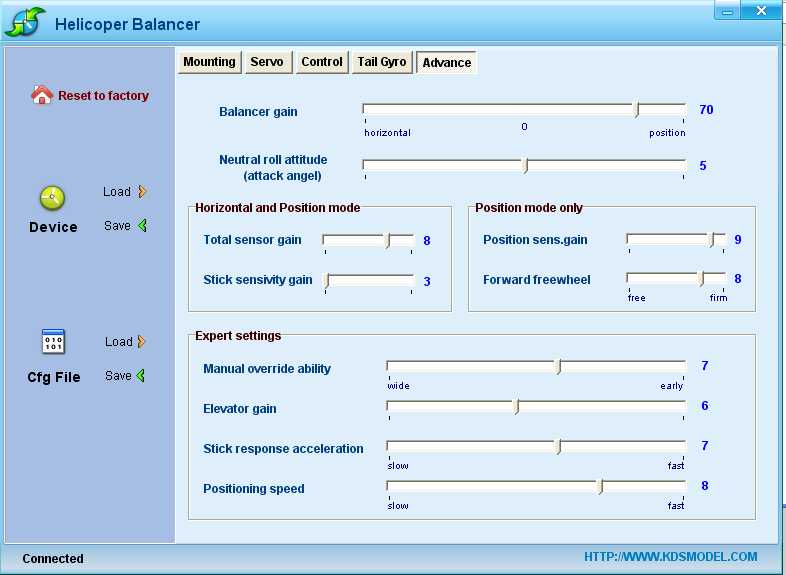
‚ ‚ئ‚حپAƒچپ[ƒ^پ[‚ج‰ٌ“]گ”‚ھچ‚‚·‚¬‚é‚و‚¤‚إ‚·‚ج‚إپAƒsƒjƒIƒ“‚ً10T‚ة‚µ‚½‚¢‚إ‚·پB
**********
++++++++++++++++++
ƒyƒCƒچپ[ƒhڈم‚°‚ـ‚‚ê‚é‹@‘ج‚àپB
ƒGƒ‹ƒS50(’†Œأ)
‹@‘جپF18000‰~پ@
پ@•t‚¢‚ؤ‚½ƒJƒXƒ^ƒ€ƒuƒcپF
ƒپƒ^ƒ‹ƒwƒbƒhپA
ƒnƒbƒgƒٹƒ}ƒtƒ‰پ[پA
50ƒGƒ“ƒWƒ“پA
K&Sگ»ƒXƒLƒbƒhپA
HGƒeپ[ƒ‹ƒTƒ|پ[ƒgˆبچ~‚·‚ׂؤ
‚إ‚à‚ء‚ؤپA
MPM‰»“r’†‚إ‚·پBپƒƒlƒW‚ح‰¼ژ~‚كڈَ‘ش‚إ‚·پB
ƒlƒW‚ح‚·‚ׂؤ“ˆê‚³‚ê‚ؤ‚ؤپAƒNƒ‰ƒbƒ`‚جƒZƒ“ƒ^پ[ڈo‚µ‚à‚â‚è‚â‚·‚پA
‚·‚²‚گ®”ُگ«‚ھ—ا‚¢‹@‘ج‚إ‚·‚إ‚·پB
‚ـ‚½پA
‰َ‚ê‚ؤ‚àگ»چىڈo—ˆ‚éƒpپ[ƒc‚ھ‘½‚¢‚إ‚·پB

ƒAƒbƒpپ[ƒtƒŒپ[ƒ€‚حƒGƒ‹ƒS30—p‚إ‚·پBپƒچفŒةگط‚êپH
ٹ®‘S‚ة“¯‚¶گ،–@‚جƒWƒ…ƒ‰ƒ‹ƒ~ƒ“”آ‚إ‚·‚ج‚إ‹“x‚ھˆل‚¤‚ئ‚àژv‚¦‚ـ‚¹‚ٌپB
‚و‚ء‚ؤپA•i”ش‚جˆل‚¢‚ح•s–¾‚إ‚·پB
پiMPM—p‚جƒTپ[ƒ{‚©‚çƒٹƒ“ƒPپ[ƒWژü‚è‚ح–w‚اƒGƒAƒXƒLƒbƒpپ[‚ج•”•i‚ئ‹¤’ت‚إ‚·‚ج‚إˆہگS‚إ‚·پBپj
ƒZƒbƒg‚ج’†‚ة‚©‚ب‚葽—ت‚جڈd•،‚µ‚½ƒpپ[ƒc‚ھ‘¶چف‚µ‚ـ‚µ‚½پBپƒ‚ظ‚ئ‚ٌ‚ا‚جƒٹƒ“ƒPپ[ƒW‚ة‚حژ²‚ب‚ا‚ھ‚آ‚¢‚ؤ‚ـ‚·پB
‰ü‘¢”ï—p‚ح‚¨‚»‚炈ꖜ‰~’´‚¦‚é‚©‚ا‚¤‚©پH
‚ئ‚¢‚¤’ِ“x‚إ‚·پB
’چ•¶‚جکR‚ê‚حپA
ƒ|ƒٹƒXƒ‰ƒCƒ_پ[‚ئپAƒXƒyپ[ƒTپ[A‚ئBپAƒeپ[ƒ‹‚جƒچƒbƒh‚ب‚ج‚إ‚·‚ھپA
’چ•¶گ”‚ةگ§Œہ‚ھ‚ ‚è‚ـ‚µ‚ؤƒJپ[ƒg‚ة“ü‚ç‚ب‚©‚ء‚½Œج‚إ‚·پB
ƒ|ƒٹƒXƒ‰ƒCƒ_پ[‚حT=0.5mmژ÷ژ‰‚جƒڈƒbƒVƒƒپ[‚إ‚·پB
ƒXƒyپ[ƒTپ[‚ئ‚حŒٹ‚جٹJ‚¢‚½‰~’Œ‚إ‚·پB
ƒeپ[ƒ‹‚جƒچƒbƒh‚حپA
ƒTپ[ƒ{‚ًƒeپ[ƒ‹ƒuپ[ƒ€‚ة‚‚ء‚آ‚¯‚و‚¤‚ئچl‚¦‚ؤ‚¢‚éŒجپA‰ءچH‚ج‚ف‚ج—\’è‚إ‚·پB
1743‰~‚ج600mm–طگ»ƒچپ[ƒ^پ[‚ً3ƒZƒbƒg’چ•¶‚µ‚ـ‚µ‚½پB
1,743‰~ x 3 Œآ = 5,229‰~
 ‚إپA
‚±‚ê‚ً“d“®‰»‚·‚é‚ب‚ç
‚RSƒٹƒ|‚ج’¼—ٌ‚إOK‚إ‚·‚ج‚إOK‚إ‚·پB
’¼—ٌ‚جڈêچ‡پA
ƒoƒbƒeƒٹپ[کV‹€‰»‚إ—e—ت‚ج‚خ‚ç‚آ‚«‚ب‚ا‚ھ‚ ‚邽‚كپA
“ٌ‚آ‚ج‚RS—p‚جƒoƒbƒeƒٹپ[ƒAƒ‰پ[ƒ€‚ً•t‚¯‚ؤ
‘پٹْ‚ة”»’è‚إ‚«‚é‚و‚¤‚ة‚µ‚ـ‚·پB
50A‚حڈ‚ب‚»‚¤‚إ‚·‚ھپA
‚RD—p‚¶‚ل‚ب‚¢‚±‚ئ‚ًچl‚¦‚ؤŒّ—¦ڈdژ‹‚إƒJƒŒƒ“ƒgƒٹƒ~ƒbƒ^پ[‚à‚آ‚¯‚½گفŒv‚·‚ê‚خ‰آ”\‚¾‚ئژv‚ي‚ê‚ـ‚·پB
‚ـ‚½PC‚جƒXƒCƒbƒ`ƒ“ƒO“dŒ¹‚ج‚TV‚ح”ٌڈي‚ةچ‚ڈo—ح‚إ‚·‚ج‚إ’¼—ٌڈo—ˆ‚ـ‚·پB
ATX‚حƒ\ƒtƒgOFF‚àچl—¶‚³‚ê‚ؤ‚¢‚邽‚كƒ}ƒUپ[ƒ{پ[ƒh‘¤‚ة“dŒ¹SW‚ھگع‘±‚³‚ê‚ؤ‚ـ‚·‚ھ
•ت”„‚è‚جƒXƒCƒbƒ`‚ً‚آ‚ب‚°‚ç‚ê‚é‚炵‚¢‚إ‚·‚ھپA
“dŒ¹ƒ†ƒjƒbƒg‚جƒsƒ“ƒAƒTƒCƒ““I‚ةPS_ON(‘ه’ï—خ)‚ئGND(چ•)‚ًƒVƒ‡پ[ƒg‚·‚ê‚خOK‚إ‚·پB
‚إپA
‚±‚ê‚ً“d“®‰»‚·‚é‚ب‚ç
‚RSƒٹƒ|‚ج’¼—ٌ‚إOK‚إ‚·‚ج‚إOK‚إ‚·پB
’¼—ٌ‚جڈêچ‡پA
ƒoƒbƒeƒٹپ[کV‹€‰»‚إ—e—ت‚ج‚خ‚ç‚آ‚«‚ب‚ا‚ھ‚ ‚邽‚كپA
“ٌ‚آ‚ج‚RS—p‚جƒoƒbƒeƒٹپ[ƒAƒ‰پ[ƒ€‚ً•t‚¯‚ؤ
‘پٹْ‚ة”»’è‚إ‚«‚é‚و‚¤‚ة‚µ‚ـ‚·پB
50A‚حڈ‚ب‚»‚¤‚إ‚·‚ھپA
‚RD—p‚¶‚ل‚ب‚¢‚±‚ئ‚ًچl‚¦‚ؤŒّ—¦ڈdژ‹‚إƒJƒŒƒ“ƒgƒٹƒ~ƒbƒ^پ[‚à‚آ‚¯‚½گفŒv‚·‚ê‚خ‰آ”\‚¾‚ئژv‚ي‚ê‚ـ‚·پB
‚ـ‚½PC‚جƒXƒCƒbƒ`ƒ“ƒO“dŒ¹‚ج‚TV‚ح”ٌڈي‚ةچ‚ڈo—ح‚إ‚·‚ج‚إ’¼—ٌڈo—ˆ‚ـ‚·پB
ATX‚حƒ\ƒtƒgOFF‚àچl—¶‚³‚ê‚ؤ‚¢‚邽‚كƒ}ƒUپ[ƒ{پ[ƒh‘¤‚ة“dŒ¹SW‚ھگع‘±‚³‚ê‚ؤ‚ـ‚·‚ھ
•ت”„‚è‚جƒXƒCƒbƒ`‚ً‚آ‚ب‚°‚ç‚ê‚é‚炵‚¢‚إ‚·‚ھپA
“dŒ¹ƒ†ƒjƒbƒg‚جƒsƒ“ƒAƒTƒCƒ““I‚ةPS_ON(‘ه’ï—خ)‚ئGND(چ•)‚ًƒVƒ‡پ[ƒg‚·‚ê‚خOK‚إ‚·پB
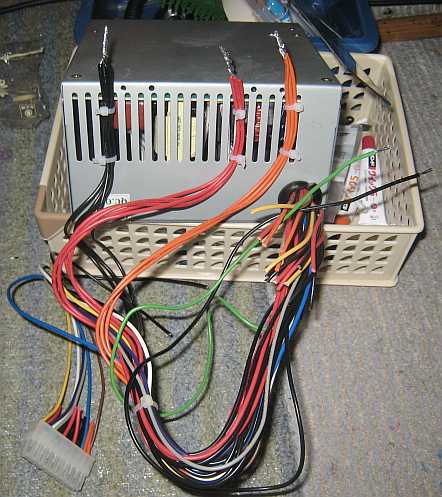 ڈd—v‚بژg—pڈم‚ج’چˆس“I‹Lژ–پ@پƒ•KŒ©پIپI
ƒOƒ‰ƒXFRP”آ‚ئƒWƒƒƒ“ƒNƒpپ[ƒc‚إƒ‚پ[ƒ^پ[‚ةŒ©چ‡‚¤Œy—ت‚جˆہ‰؟‚بƒwƒٹƒRƒvƒ^پ[‚àچى‚ê‚»‚¤‚إ‚·پB
ˆہ‚‚ؤژg‚¦‚»‚¤‚بچقژ؟‚حپcپA
ƒAƒ‹ƒ~چ‡‹à(—n‚©‚µ‚ؤ‚àƒCƒP‚»‚¤)پA”–AƒXƒ`ƒچپ[ƒ‹پAƒxƒjƒ„”آپAABS”آپc
ڈd—v‚بژg—pڈم‚ج’چˆس“I‹Lژ–پ@پƒ•KŒ©پIپI
ƒOƒ‰ƒXFRP”آ‚ئƒWƒƒƒ“ƒNƒpپ[ƒc‚إƒ‚پ[ƒ^پ[‚ةŒ©چ‡‚¤Œy—ت‚جˆہ‰؟‚بƒwƒٹƒRƒvƒ^پ[‚àچى‚ê‚»‚¤‚إ‚·پB
ˆہ‚‚ؤژg‚¦‚»‚¤‚بچقژ؟‚حپcپA
ƒAƒ‹ƒ~چ‡‹à(—n‚©‚µ‚ؤ‚àƒCƒP‚»‚¤)پA”–AƒXƒ`ƒچپ[ƒ‹پAƒxƒjƒ„”آپAABS”آپc
 ‚ئ‚è‚ ‚¦‚¸پA
80A‚جAMP
پu Hyperion TITAN 80AHP-TITAN-80-PBW31پv‚إ‚·پB
‚ ‚蓾‚ب‚¢‚ئژv‚¢‚ـ‚·‚ھپA
‹C‰·‚ھچ‚‚¢‚ب‚çگê—p‚جFin‚ً‚آ‚¯‚ê‚خ—ا‚¢‚ئژv‚¢‚ـ‚µ‚½پB
ƒnƒCƒyƒٹƒIƒ“‚جESC‚جƒIƒvƒVƒ‡ƒ“‚إ‚ ‚é•ْ”MƒtƒBƒ“‚ً‚‚ء‚آ‚¯‚ؤ‚ف‚ـ‚µ‚½پB
‚±‚ê‚ًˆ¬‚é‚ئ‚ئ‚ء‚ؤ‚à—₽‚ٹ´‚¶‚ـ‚µ‚½پB
‰؛گ}‚ج‚و‚¤‚ةچׂ©‚¢ƒOƒ‹پ[ƒ”ƒBƒ“ƒO‚à•t‚¢‚ؤ‚ـ‚·پB
‚±‚جچغپAٹô‚آ‚©‚ج’·‚³‚ةگط‚ç‚ê‚ؤ‚¢‚é”Mژûڈkƒ`ƒ…پ[ƒu‚ھ‚ ‚è‚ـ‚µ‚ؤپA
”ي•‚ً”چ‚ھ‚µ‚ؤƒvƒŒپ[ƒg‚ـ‚إ‚ئ‚ء‚ؤ•t‚¯‚é‚ج‚©پA
”ي•‚ً‚ئ‚炸ڈو‚ء‚¯‚½ڈم‚إ‚»‚جڈم‚©‚ç‚à‚¤ˆê“x‚ب‚ج‚©–ہ‚¢‚ـ‚µ‚ؤپA
‚±‚ج‚â‚è•û‚ة‚µ‚ـ‚µ‚½پBپƒٹٹ‚èژ~‚ك‚ةگع’…چـ‚ً‚؟‚ر‚ء‚ئ‚آ‚¯‚ـ‚µ‚½پB
‚ئ‚è‚ ‚¦‚¸پA
80A‚جAMP
پu Hyperion TITAN 80AHP-TITAN-80-PBW31پv‚إ‚·پB
‚ ‚蓾‚ب‚¢‚ئژv‚¢‚ـ‚·‚ھپA
‹C‰·‚ھچ‚‚¢‚ب‚çگê—p‚جFin‚ً‚آ‚¯‚ê‚خ—ا‚¢‚ئژv‚¢‚ـ‚µ‚½پB
ƒnƒCƒyƒٹƒIƒ“‚جESC‚جƒIƒvƒVƒ‡ƒ“‚إ‚ ‚é•ْ”MƒtƒBƒ“‚ً‚‚ء‚آ‚¯‚ؤ‚ف‚ـ‚µ‚½پB
‚±‚ê‚ًˆ¬‚é‚ئ‚ئ‚ء‚ؤ‚à—₽‚ٹ´‚¶‚ـ‚µ‚½پB
‰؛گ}‚ج‚و‚¤‚ةچׂ©‚¢ƒOƒ‹پ[ƒ”ƒBƒ“ƒO‚à•t‚¢‚ؤ‚ـ‚·پB
‚±‚جچغپAٹô‚آ‚©‚ج’·‚³‚ةگط‚ç‚ê‚ؤ‚¢‚é”Mژûڈkƒ`ƒ…پ[ƒu‚ھ‚ ‚è‚ـ‚µ‚ؤپA
”ي•‚ً”چ‚ھ‚µ‚ؤƒvƒŒپ[ƒg‚ـ‚إ‚ئ‚ء‚ؤ•t‚¯‚é‚ج‚©پA
”ي•‚ً‚ئ‚炸ڈو‚ء‚¯‚½ڈم‚إ‚»‚جڈم‚©‚ç‚à‚¤ˆê“x‚ب‚ج‚©–ہ‚¢‚ـ‚µ‚ؤپA
‚±‚ج‚â‚è•û‚ة‚µ‚ـ‚µ‚½پBپƒٹٹ‚èژ~‚ك‚ةگع’…چـ‚ً‚؟‚ر‚ء‚ئ‚آ‚¯‚ـ‚µ‚½پB

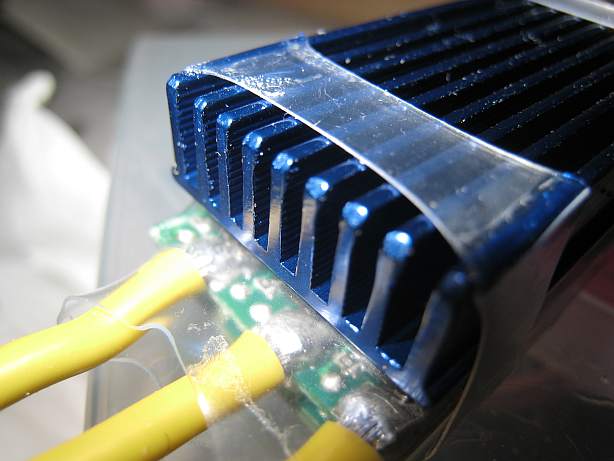 -------
Scorpion‚جƒ‚پ[ƒ^پ[
HK-4025-1100-12n8p
پ@پ،ƒXƒeƒCƒ^پ[ŒaپF 40 mm (1.56 in)
پ@پ،ƒ}ƒOƒlƒbƒg’·پF 25 mm (0.975 in)
پ@پ،KV’lپF1100پiKV RM/Voltپj
پ@پ،“à•”’ïچR (Rm) پF 0.008 Ohms
پ@پ،چإ‘هŒp‘±“d—¬ پF 100A
پ@پ،چإ‘هŒp‘±“d—حپF 2200W
پ@پ،ڈd—تپF 326g
پ@پ،ٹOŒaپF 48.9 mm (1.9 in)
پ@پ،ƒVƒƒƒtƒgŒaپF 4.98 mm (1.9 in)
پ@پ،ƒ{ƒfƒB’·پF 51.5 mm (1.81 in)
پ@پ،ƒVƒƒƒtƒg‘S’·پF93 mm(3.42 in)
12n8p‚ئ‚حپAƒ}ƒOƒlƒbƒg12ŒآپAƒRƒCƒ‹8Œآ‚ئژv‚ي‚ê‚ـ‚·پB
’²‚ׂؤ‚ف‚½‚çپA
No. of Stator Arms 12
No. of Stator Poles 8
‹t‚ة‚ج‚و‚¤‚بپHپH
‹ة‚حPole‚إ‚·‚©‚çƒ}ƒOƒlƒbƒg‚ج‚و‚¤‚بپBƒeƒXƒgƒfپ[ƒ^‚إ‚حƒ}ƒOƒlƒbƒgگ”‚إŒvژZ‚³‚ê‚ؤ‚ـ‚µ‚½پB
ƒAƒNƒeƒBƒuRPM ƒRƒ“ƒgƒچپ[ƒ‹(ƒKƒoƒiپ[ƒ‚پ[ƒh) ƒ‚پ[ƒ^پ[RPM = [“d‹C“I RPM*2 / ƒ‚پ[ƒ^پ[‚ج‹ةگ”]
چإ‘ه100,000(“d‹C“Irpm)‚جƒ‚پ[ƒh‚ح‚©‚ب‚è‘ه‚«‚ك(1.5”{ˆبڈم)
‚ة‚إ‚ـ‚·‚©‚çپA
ƒچپ[ƒ^پ[‰ٌ“]گ”‚ةٹ·ژZ‚·‚é‚ئپ¨200000/8/11پپ2272rpm‚ج1.5”{ˆبڈمپB
ƒŒƒ“ƒW2‚إ‚ح‹K’è—ت‚ھ‚إ‚ـ‚·‚ج‚إپ¨213000/8/11پپ2420rpm‚إڈ\•ھ‚ة’´‚¦‚ؤ‚ـ‚·پB
•‰‰×ƒAƒٹ‚جƒxƒ“ƒ`ƒ}پ[ƒN‚ھ•K—p‚»‚¤‚إ‚·پBپƒƒAƒپƒ“ƒ{‚ة‚آ‚¯‚ؤپBƒZƒ“ƒTپ[‚إ“ا‚قٹ´‚¶‚إپB
‚RƒZƒ‹‚إ‚àƒMƒٹƒMƒٹ”ٍ‚ׂéژd—l‚ئ‚µ‚ؤ‘I‚ٌ‚¾‚ج‚إ‚·‚ھپA
‚UƒZƒ‹‚إ‚ح‚©‚ب‚胀ƒ_‚ج‚و‚¤‚بپcپB
ƒZƒ‹گ”‚ج’ل‚¢‘ه—e—ت“d’r‚ًژg‚¤—ک“_‚حپH
‚ـ‚¸پA
ƒGƒlƒ‹ƒMپ[—e—ت‚ة‘خ‚µ‚ؤ‚ج’P‰؟‚ھˆل‚ء‚ؤ‚éƒgƒR‚ھ‚ ‚è‚ـ‚·پBپƒ‚SS‚ھˆہ‚¢‚و‚¤‚بپB
-------
Scorpion‚جƒ‚پ[ƒ^پ[
HK-4025-1100-12n8p
پ@پ،ƒXƒeƒCƒ^پ[ŒaپF 40 mm (1.56 in)
پ@پ،ƒ}ƒOƒlƒbƒg’·پF 25 mm (0.975 in)
پ@پ،KV’lپF1100پiKV RM/Voltپj
پ@پ،“à•”’ïچR (Rm) پF 0.008 Ohms
پ@پ،چإ‘هŒp‘±“d—¬ پF 100A
پ@پ،چإ‘هŒp‘±“d—حپF 2200W
پ@پ،ڈd—تپF 326g
پ@پ،ٹOŒaپF 48.9 mm (1.9 in)
پ@پ،ƒVƒƒƒtƒgŒaپF 4.98 mm (1.9 in)
پ@پ،ƒ{ƒfƒB’·پF 51.5 mm (1.81 in)
پ@پ،ƒVƒƒƒtƒg‘S’·پF93 mm(3.42 in)
12n8p‚ئ‚حپAƒ}ƒOƒlƒbƒg12ŒآپAƒRƒCƒ‹8Œآ‚ئژv‚ي‚ê‚ـ‚·پB
’²‚ׂؤ‚ف‚½‚çپA
No. of Stator Arms 12
No. of Stator Poles 8
‹t‚ة‚ج‚و‚¤‚بپHپH
‹ة‚حPole‚إ‚·‚©‚çƒ}ƒOƒlƒbƒg‚ج‚و‚¤‚بپBƒeƒXƒgƒfپ[ƒ^‚إ‚حƒ}ƒOƒlƒbƒgگ”‚إŒvژZ‚³‚ê‚ؤ‚ـ‚µ‚½پB
ƒAƒNƒeƒBƒuRPM ƒRƒ“ƒgƒچپ[ƒ‹(ƒKƒoƒiپ[ƒ‚پ[ƒh) ƒ‚پ[ƒ^پ[RPM = [“d‹C“I RPM*2 / ƒ‚پ[ƒ^پ[‚ج‹ةگ”]
چإ‘ه100,000(“d‹C“Irpm)‚جƒ‚پ[ƒh‚ح‚©‚ب‚è‘ه‚«‚ك(1.5”{ˆبڈم)
‚ة‚إ‚ـ‚·‚©‚çپA
ƒچپ[ƒ^پ[‰ٌ“]گ”‚ةٹ·ژZ‚·‚é‚ئپ¨200000/8/11پپ2272rpm‚ج1.5”{ˆبڈمپB
ƒŒƒ“ƒW2‚إ‚ح‹K’è—ت‚ھ‚إ‚ـ‚·‚ج‚إپ¨213000/8/11پپ2420rpm‚إڈ\•ھ‚ة’´‚¦‚ؤ‚ـ‚·پB
•‰‰×ƒAƒٹ‚جƒxƒ“ƒ`ƒ}پ[ƒN‚ھ•K—p‚»‚¤‚إ‚·پBپƒƒAƒپƒ“ƒ{‚ة‚آ‚¯‚ؤپBƒZƒ“ƒTپ[‚إ“ا‚قٹ´‚¶‚إپB
‚RƒZƒ‹‚إ‚àƒMƒٹƒMƒٹ”ٍ‚ׂéژd—l‚ئ‚µ‚ؤ‘I‚ٌ‚¾‚ج‚إ‚·‚ھپA
‚UƒZƒ‹‚إ‚ح‚©‚ب‚胀ƒ_‚ج‚و‚¤‚بپcپB
ƒZƒ‹گ”‚ج’ل‚¢‘ه—e—ت“d’r‚ًژg‚¤—ک“_‚حپH
‚ـ‚¸پA
ƒGƒlƒ‹ƒMپ[—e—ت‚ة‘خ‚µ‚ؤ‚ج’P‰؟‚ھˆل‚ء‚ؤ‚éƒgƒR‚ھ‚ ‚è‚ـ‚·پBپƒ‚SS‚ھˆہ‚¢‚و‚¤‚بپB
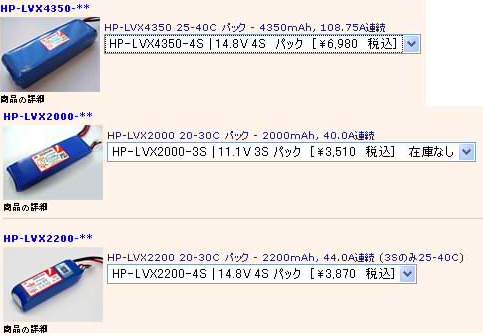 چ‚ˆ³‘—“dگü‚ئ“¯‚¶Œ´—‚إ‚‚‚é‚ئپA
“¯ˆê‚ب“d—ح‚إ’ل“dˆ³‚إ“®‚©‚·‚ئ’ïچR‚ة‚و‚éƒچƒX‚ھ‘ه‚«‚‚ب‚è‚ـ‚·پB
ژہچغ‚حڈ\•ھ‚ة’ïچR‚ھ’ل‚¢‚ب‚ç‚ا‚؟‚ç‚إ‚à—ا‚¢‚ئŒ¾‚¤‚±‚ئ‚ة‚ب‚è‚ـ‚·پB
چ‚ˆ³‘—“dگü‚ئ“¯‚¶Œ´—‚إ‚‚‚é‚ئپA
“¯ˆê‚ب“d—ح‚إ’ل“dˆ³‚إ“®‚©‚·‚ئ’ïچR‚ة‚و‚éƒچƒX‚ھ‘ه‚«‚‚ب‚è‚ـ‚·پB
ژہچغ‚حڈ\•ھ‚ة’ïچR‚ھ’ل‚¢‚ب‚ç‚ا‚؟‚ç‚إ‚à—ا‚¢‚ئŒ¾‚¤‚±‚ئ‚ة‚ب‚è‚ـ‚·پB
88mm/88Tپپ1.0ƒ‚ƒWƒ…پ[ƒ‹
 پ@پƒS45C‹@ٹBچ\‘¢—p’Y‘fچ|(ڈؤ‚«“ü‚ê‰آ”\) ƒ‚ƒWƒ…پ[ƒ‹1.0‚إ8T,9T,12T‚جƒsƒjƒIƒ“ƒMƒ„ژ•گ” 8.9.12
8پ`10T‚‚ç‚¢‚حƒtƒŒپ[ƒ€‰ءچH–³‚µ‚إƒJƒ“ƒ^ƒ“‚ة•دچX‚إ‚«‚ـ‚·پB
‚±‚جƒ‚پ[ƒ^پ[‚إ6ƒZƒ‹‚ة‚ؤŒّ—¦‚ً—Dگو‚³‚¹‚é‚ب‚çپA8T‚ھ—ا‚¢‚إ‚·‚ثپB
-----------------
پ@پƒS45C‹@ٹBچ\‘¢—p’Y‘fچ|(ڈؤ‚«“ü‚ê‰آ”\) ƒ‚ƒWƒ…پ[ƒ‹1.0‚إ8T,9T,12T‚جƒsƒjƒIƒ“ƒMƒ„ژ•گ” 8.9.12
8پ`10T‚‚ç‚¢‚حƒtƒŒپ[ƒ€‰ءچH–³‚µ‚إƒJƒ“ƒ^ƒ“‚ة•دچX‚إ‚«‚ـ‚·پB
‚±‚جƒ‚پ[ƒ^پ[‚إ6ƒZƒ‹‚ة‚ؤŒّ—¦‚ً—Dگو‚³‚¹‚é‚ب‚çپA8T‚ھ—ا‚¢‚إ‚·‚ثپB
-----------------
 پ@پƒ
پ@پƒ
 پ@پƒ
پ@پƒ
 پ@پƒ
پ@پƒ
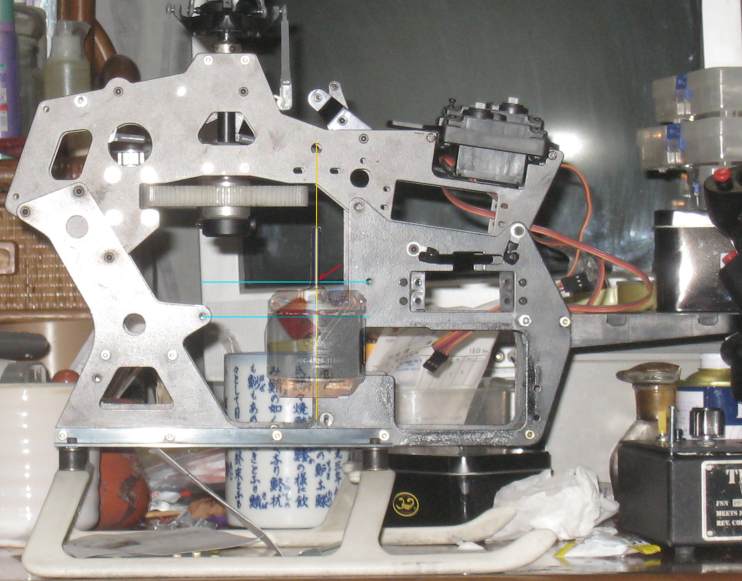 پ@پƒ
پ@پ@ƒMƒ„‚ح8T‚ة‚µ‚ـ‚µ‚½پBپƒƒmپ[ƒ}ƒ‹‚ح9T
ƒ}ƒXƒg—p‚ج•”•i‚ًژg‚¤ژ–‚ة‚µ‚ـ‚µ‚½پB
پ@پƒ
پ@پ@ƒMƒ„‚ح8T‚ة‚µ‚ـ‚µ‚½پBپƒƒmپ[ƒ}ƒ‹‚ح9T
ƒ}ƒXƒg—p‚ج•”•i‚ًژg‚¤ژ–‚ة‚µ‚ـ‚µ‚½پB
 پ@پƒ
پ@پƒ
 پ@پƒ
پ@پƒ
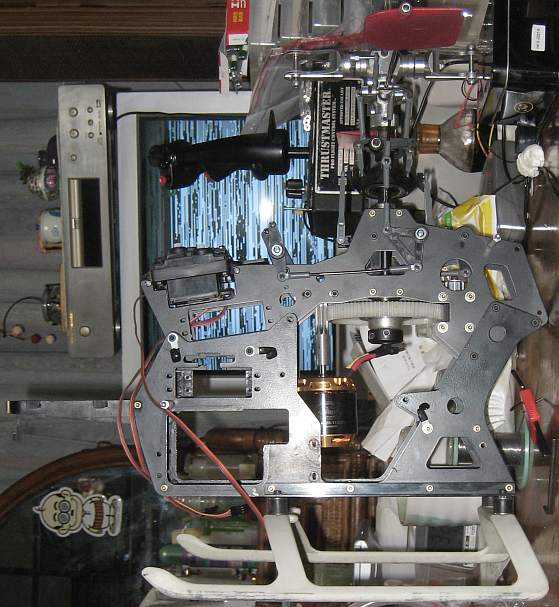 پ@پƒ
ƒ‚پ[ƒ^پ[‚جˆت’u‚ح’ل‚¢•û‚ھ’²گ®‚µ‚â‚·‚¢‚ج‚إ‚·‚ھپA
‘€ڈc“I‚ة‚حچ‚‚¢•û‚ھ‘f’¼‚ةڈo‚»‚¤‚إ—ا‚³‚»‚¤‚إ‚·پB
‚آ‚ـ‚èپAƒWƒIƒپƒgƒٹ‚ئ‰ءچHگ¸“x‚ب‚ج‚إ‚·‚ھپA
ƒMƒ„‚ًڈپXچي‚è‰ك‚¬‚½‚½‚كپA
‚±‚ج‚ھ‚½‚ً‹à‘®‚جƒVپ[ƒg‚ب‚ا‚ً‘}“ü‚·‚éƒRƒg‚إ‰ًŒˆ‚ًژژ‚ف‚ؤ‚ف‚ـ‚·پB
ƒZƒچƒeپ[ƒv‚ح‰·“x‚âŒo”N•د‰»‚ھŒƒ‚µ‚¢‚إ‚·‚ج‚إپA
گ…“¹—p‚جƒVپ[ƒٹƒ“ƒOƒeپ[ƒv‚ھژv‚¢‚ج‚ظ‚©–§’…‚µ‚ؤ—ا‚©‚ء‚½‚إ‚·پB
پ@پƒ
ƒ‚پ[ƒ^پ[‚جˆت’u‚ح’ل‚¢•û‚ھ’²گ®‚µ‚â‚·‚¢‚ج‚إ‚·‚ھپA
‘€ڈc“I‚ة‚حچ‚‚¢•û‚ھ‘f’¼‚ةڈo‚»‚¤‚إ—ا‚³‚»‚¤‚إ‚·پB
‚آ‚ـ‚èپAƒWƒIƒپƒgƒٹ‚ئ‰ءچHگ¸“x‚ب‚ج‚إ‚·‚ھپA
ƒMƒ„‚ًڈپXچي‚è‰ك‚¬‚½‚½‚كپA
‚±‚ج‚ھ‚½‚ً‹à‘®‚جƒVپ[ƒg‚ب‚ا‚ً‘}“ü‚·‚éƒRƒg‚إ‰ًŒˆ‚ًژژ‚ف‚ؤ‚ف‚ـ‚·پB
ƒZƒچƒeپ[ƒv‚ح‰·“x‚âŒo”N•د‰»‚ھŒƒ‚µ‚¢‚إ‚·‚ج‚إپA
گ…“¹—p‚جƒVپ[ƒٹƒ“ƒOƒeپ[ƒv‚ھژv‚¢‚ج‚ظ‚©–§’…‚µ‚ؤ—ا‚©‚ء‚½‚إ‚·پB
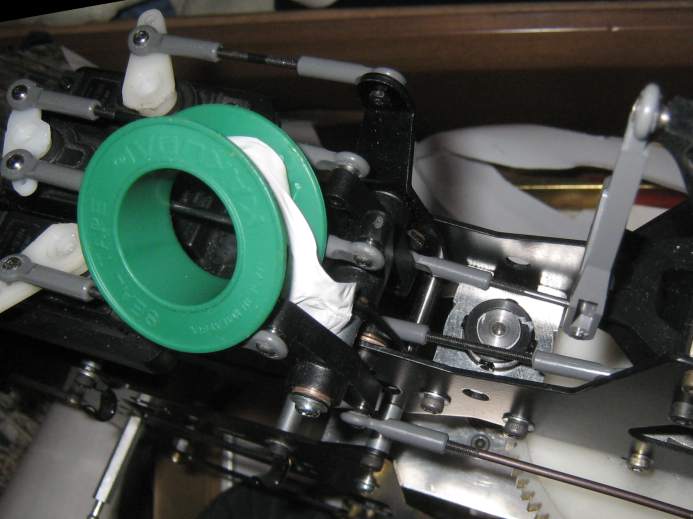 پ@پƒ
L60ƒNƒچƒXƒپƒ“ƒoپ[‚ة‰،Œٹ‚ًŒ@‚ء‚ؤپA
ژ÷ژ‰ˆ½‚¢‚حƒWƒ…ƒ‰ƒ‹ƒ~ƒ“”آ‚ًSUSƒlƒW‚إŒإ’è‚·‚é‚ئƒXƒ}پ[ƒgپB
گ…گF‚جگü‚ج‰E’[‚ً‰„’·‚·‚邱‚ئ‚إX-Y•½–تڈم‚إ‚جƒYƒŒ‚ة‘خڈˆپB
ƒIƒŒƒ“ƒW‚جگü‚حƒNƒچƒXƒپƒ“ƒoپ[‚ة’ت‚·ƒlƒW‚ئƒXƒyپ[ƒTپ[“™‚إ‚·پBپƒ‚ظ‚عپAZ•ûŒü‚ج‚ف‚جژxژ‚ھ–ع“IپB
پ@پƒ
L60ƒNƒچƒXƒپƒ“ƒoپ[‚ة‰،Œٹ‚ًŒ@‚ء‚ؤپA
ژ÷ژ‰ˆ½‚¢‚حƒWƒ…ƒ‰ƒ‹ƒ~ƒ“”آ‚ًSUSƒlƒW‚إŒإ’è‚·‚é‚ئƒXƒ}پ[ƒgپB
گ…گF‚جگü‚ج‰E’[‚ً‰„’·‚·‚邱‚ئ‚إX-Y•½–تڈم‚إ‚جƒYƒŒ‚ة‘خڈˆپB
ƒIƒŒƒ“ƒW‚جگü‚حƒNƒچƒXƒپƒ“ƒoپ[‚ة’ت‚·ƒlƒW‚ئƒXƒyپ[ƒTپ[“™‚إ‚·پBپƒ‚ظ‚عپAZ•ûŒü‚ج‚ف‚جژxژ‚ھ–ع“IپB
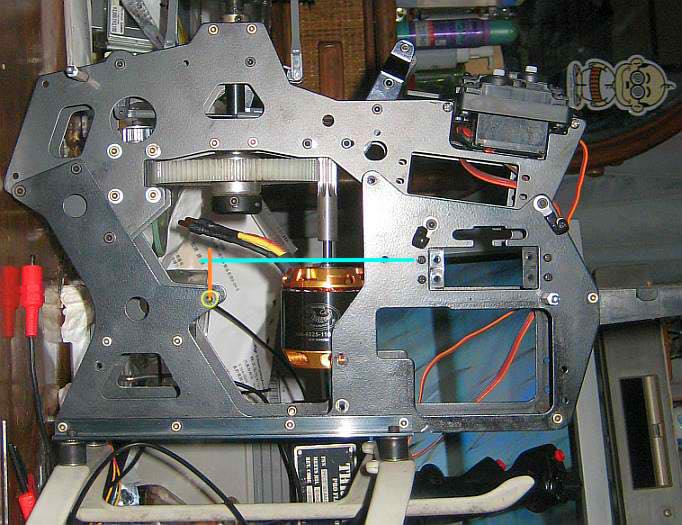 پ@پƒ
پE’چ•¶
پ،A2017ŒْƒvƒŒپ[ƒgگط‚蔄‚è A2017 4FT T=5x135x60 850‰~
پ،A2017ƒvƒŒپ[ƒg T=2.0پ~100پ~150 390‰~
پ،ƒ|ƒٹƒAƒZƒ^پ[ƒ‹”آ(POM) T=5پ~100پ~150پi”’پj 600‰~پ@پƒ”نڈdپF1.4
پ@ˆّ’£‹“x‚ئ‘دڈصŒ‚گ«‚ًŒ“‚ث”ُ‚¦‚½ƒGƒ“ƒWƒjƒAƒٹƒ“ƒOƒvƒ‰ƒXƒ`ƒbƒN‚إ‚·پB
پ@ژ©Œبڈپٹٹگ«‚ة‚و‚è–€ژC‚ھڈ‚ب‚¢‚ج‚إپAژ•ژش‚âگ “®•”•i‚ة—ک—p‚³‚ê‚ؤ‚¢‚ـ‚·پB
پ@گطچيگ«‚ج—اچD‚بژ÷ژ‰‚إپAگطچي”M‚ة‚و‚ء‚ؤ—n‚¯‚邱‚ئ‚àڈ‚ب‚پAƒTƒNƒTƒNچي‚ê‚ـ‚·پB
POM‚ج•¨گ«‚ھ•s–¾‚إ‚µ‚½‚ج‚إپAڈd—ت‚ئ‹“x‚جƒoƒ‰ƒ“ƒX‚ً‹C‚ة‚µ‚ؤ‚¨‚è‚ـ‚µ‚½پB
‚إ‚àپA
ƒWƒ…ƒ‰ƒ‹ƒ~ƒ“‚جگطچي‚حپcپA
”نڈd‚إŒ©‚é‚ئپAPOM‚حƒJپ[ƒ{ƒ“FRPژ÷ژ‰‚ئ“¯“™‚إŒy—ت‚إ‚·پB
‹à‘®‚ئ‚جگعچ‡•”•ھ‚ة‚ؤ‰—حڈW’†‚µ‚ة‚‚¢‚و‚¤‚ةƒڈƒbƒVƒƒپ[ˆت‚ح•K—v‚إ‚·پB
ڈd‚¢‚ئ‚¢‚¤ƒCƒپپ[ƒW‚جƒWƒ…ƒ‰ƒ‹ƒ~ƒ“‚à”نڈd‚ح2.2ˆت‚إ‚·‚©‚爫‚‚ب‚¢‚إ‚·پB
090418
ƒ‚ƒm‚ھ—ˆ‚ـ‚µ‚½پB
پ@پƒ
پE’چ•¶
پ،A2017ŒْƒvƒŒپ[ƒgگط‚蔄‚è A2017 4FT T=5x135x60 850‰~
پ،A2017ƒvƒŒپ[ƒg T=2.0پ~100پ~150 390‰~
پ،ƒ|ƒٹƒAƒZƒ^پ[ƒ‹”آ(POM) T=5پ~100پ~150پi”’پj 600‰~پ@پƒ”نڈdپF1.4
پ@ˆّ’£‹“x‚ئ‘دڈصŒ‚گ«‚ًŒ“‚ث”ُ‚¦‚½ƒGƒ“ƒWƒjƒAƒٹƒ“ƒOƒvƒ‰ƒXƒ`ƒbƒN‚إ‚·پB
پ@ژ©Œبڈپٹٹگ«‚ة‚و‚è–€ژC‚ھڈ‚ب‚¢‚ج‚إپAژ•ژش‚âگ “®•”•i‚ة—ک—p‚³‚ê‚ؤ‚¢‚ـ‚·پB
پ@گطچيگ«‚ج—اچD‚بژ÷ژ‰‚إپAگطچي”M‚ة‚و‚ء‚ؤ—n‚¯‚邱‚ئ‚àڈ‚ب‚پAƒTƒNƒTƒNچي‚ê‚ـ‚·پB
POM‚ج•¨گ«‚ھ•s–¾‚إ‚µ‚½‚ج‚إپAڈd—ت‚ئ‹“x‚جƒoƒ‰ƒ“ƒX‚ً‹C‚ة‚µ‚ؤ‚¨‚è‚ـ‚µ‚½پB
‚إ‚àپA
ƒWƒ…ƒ‰ƒ‹ƒ~ƒ“‚جگطچي‚حپcپA
”نڈd‚إŒ©‚é‚ئپAPOM‚حƒJپ[ƒ{ƒ“FRPژ÷ژ‰‚ئ“¯“™‚إŒy—ت‚إ‚·پB
‹à‘®‚ئ‚جگعچ‡•”•ھ‚ة‚ؤ‰—حڈW’†‚µ‚ة‚‚¢‚و‚¤‚ةƒڈƒbƒVƒƒپ[ˆت‚ح•K—v‚إ‚·پB
ڈd‚¢‚ئ‚¢‚¤ƒCƒپپ[ƒW‚جƒWƒ…ƒ‰ƒ‹ƒ~ƒ“‚à”نڈd‚ح2.2ˆت‚إ‚·‚©‚爫‚‚ب‚¢‚إ‚·پB
090418
ƒ‚ƒm‚ھ—ˆ‚ـ‚µ‚½پB
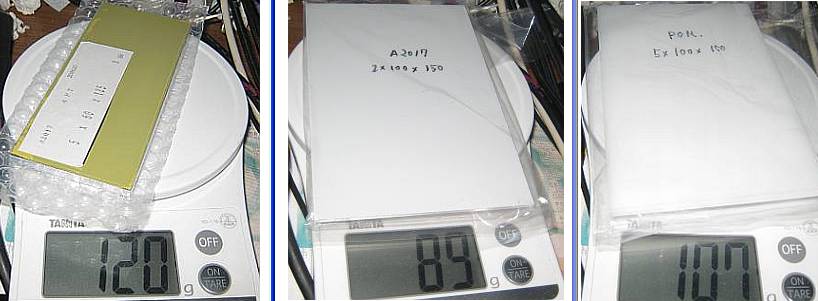 پ@پƒژèٹش‚ًڈب‚‚½‚كƒfƒXƒNƒgƒbƒv‚ة‰و‘œ‚ً•ہ‚ׂؤƒXƒNƒٹپ[ƒ“ƒVƒ‡ƒbƒg‚ئ‚¢‚¤پcپB
چ¶‚ج‚ح60mm‚ةگط’f‚³‚ê‚ؤ‚é‚ج‚ھ•ض—ک‚ب‚ج‚إ‚·‚ھپA‚‚蔲‚©‚ب‚¢‚ئڈd‚·‚¬‚إ‚·پB
‰E‚حپAژ÷ژ‰‚إ‚·‚ھپA‰ءچHگ«‚ج—ا‚³پA”P‚èچ„گ«“Iچ\‘¢‹“x‚ھ‚ث‚炦‚ـ‚·پB
“¯ˆê‚ج”آ‚ًچى‚é‚ئگ^‚ٌ’†‚ھˆê”شŒy‚¢‚إ‚·‚µپA‹“x‚àڈ\•ھ‚إ‚·پB
‚ا‚ê‚à‹“x“I‚ةƒIپ[ƒoپ[ƒXƒyƒbƒN‚إ‚·پB
‚و‚ء‚ؤپA
گ«”\‚ئکJ—ح‚جƒoƒ‰ƒ“ƒX‚ة‚¨‚¢‚ؤگ^‚ٌ’†‚ھ—ا‚³‚°‚ب‚ج‚إ‚·‚ھپA
پc‚à‚ء‚½‚¢‚ب‚¢‚إ‚·پB
-------------------
ƒyƒCƒچپ[ƒh‚ة—]—T‚ئŒ¾‚ء‚ؤ‚àپA
•t‚¯‚é•”•i‚ھ‰ءچH•”•i‚بŒجپAچي‚ê‚éƒgƒR‚إچي‚ê‚ب‚¢‚ئگل‚¾‚é‚ـ“I‚ة‚ب‚è‚»‚¤‚إ‚·پB
ƒVƒƒƒtƒg‚جŒإ’è‚ح5mm‚جƒlƒW‚إژ~‚ك‚é‚إ‚·پB
پ@پƒژèٹش‚ًڈب‚‚½‚كƒfƒXƒNƒgƒbƒv‚ة‰و‘œ‚ً•ہ‚ׂؤƒXƒNƒٹپ[ƒ“ƒVƒ‡ƒbƒg‚ئ‚¢‚¤پcپB
چ¶‚ج‚ح60mm‚ةگط’f‚³‚ê‚ؤ‚é‚ج‚ھ•ض—ک‚ب‚ج‚إ‚·‚ھپA‚‚蔲‚©‚ب‚¢‚ئڈd‚·‚¬‚إ‚·پB
‰E‚حپAژ÷ژ‰‚إ‚·‚ھپA‰ءچHگ«‚ج—ا‚³پA”P‚èچ„گ«“Iچ\‘¢‹“x‚ھ‚ث‚炦‚ـ‚·پB
“¯ˆê‚ج”آ‚ًچى‚é‚ئگ^‚ٌ’†‚ھˆê”شŒy‚¢‚إ‚·‚µپA‹“x‚àڈ\•ھ‚إ‚·پB
‚ا‚ê‚à‹“x“I‚ةƒIپ[ƒoپ[ƒXƒyƒbƒN‚إ‚·پB
‚و‚ء‚ؤپA
گ«”\‚ئکJ—ح‚جƒoƒ‰ƒ“ƒX‚ة‚¨‚¢‚ؤگ^‚ٌ’†‚ھ—ا‚³‚°‚ب‚ج‚إ‚·‚ھپA
پc‚à‚ء‚½‚¢‚ب‚¢‚إ‚·پB
-------------------
ƒyƒCƒچپ[ƒh‚ة—]—T‚ئŒ¾‚ء‚ؤ‚àپA
•t‚¯‚é•”•i‚ھ‰ءچH•”•i‚بŒجپAچي‚ê‚éƒgƒR‚إچي‚ê‚ب‚¢‚ئگل‚¾‚é‚ـ“I‚ة‚ب‚è‚»‚¤‚إ‚·پB
ƒVƒƒƒtƒg‚جŒإ’è‚ح5mm‚جƒlƒW‚إژ~‚ك‚é‚إ‚·پB
 پ@پƒ
ƒVƒƒƒtƒg‚ج‚ض‚±‚ف‚حپAƒ_ƒCƒ„ƒ‚ƒ“ƒh‰ٌ“]“uگخ‚إچي‚è‚ـ‚µ‚½پB
پ@پƒ
ƒVƒƒƒtƒg‚ج‚ض‚±‚ف‚حپAƒ_ƒCƒ„ƒ‚ƒ“ƒh‰ٌ“]“uگخ‚إچي‚è‚ـ‚µ‚½پB
 پ@پƒ
ƒ‚پ[ƒ^پ[‚جŒإ’è‚ح‚±‚ٌ‚بٹ´‚¶‚إ‚·پB
پ@پƒ
ƒ‚پ[ƒ^پ[‚جŒإ’è‚ح‚±‚ٌ‚بٹ´‚¶‚إ‚·پB
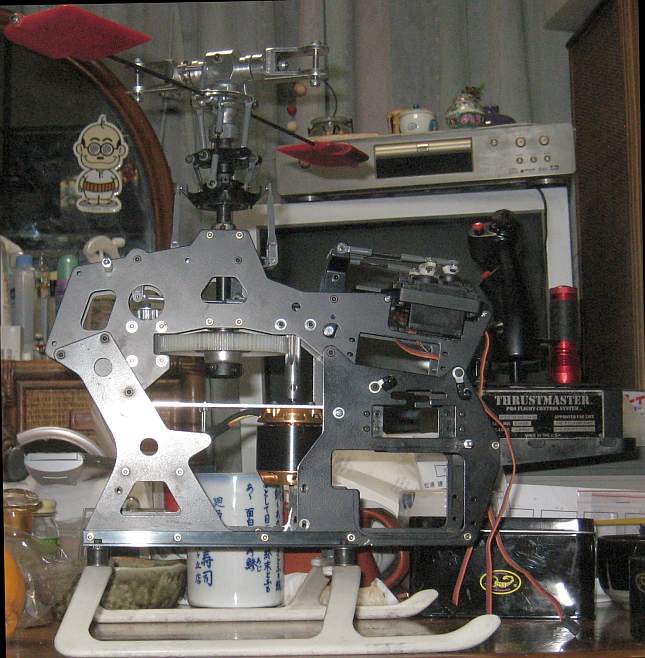 پ@پƒ
پ@پƒ
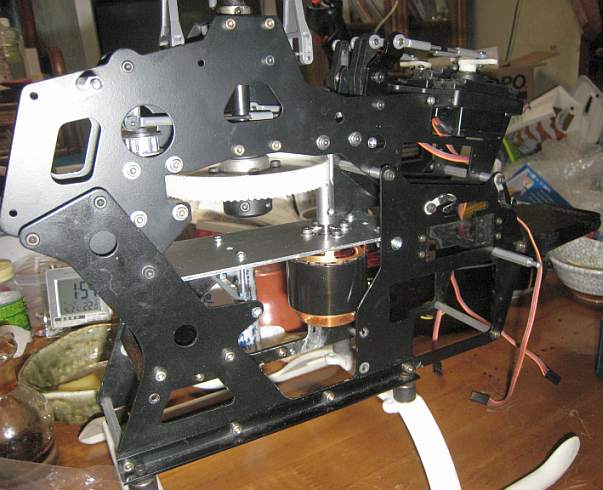 پ@پƒ
5mm‚جƒ{ƒ‹ƒg‚ًگط’f‚µ‚ؤƒCƒ‚ƒlƒW‰»‚µ‚ـ‚µ‚½پB
پ@پƒ
5mm‚جƒ{ƒ‹ƒg‚ًگط’f‚µ‚ؤƒCƒ‚ƒlƒW‰»‚µ‚ـ‚µ‚½پB
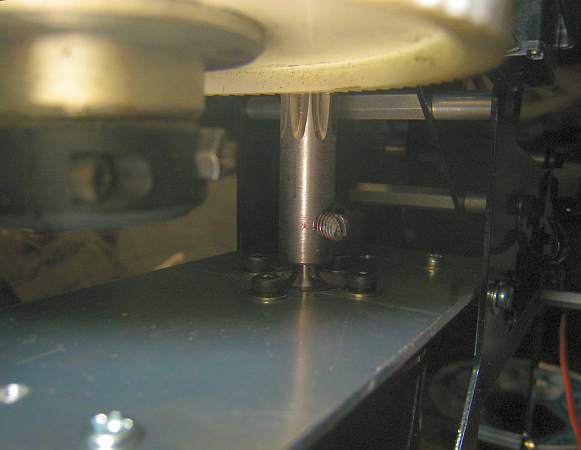 پ@پƒ
پ@پƒ
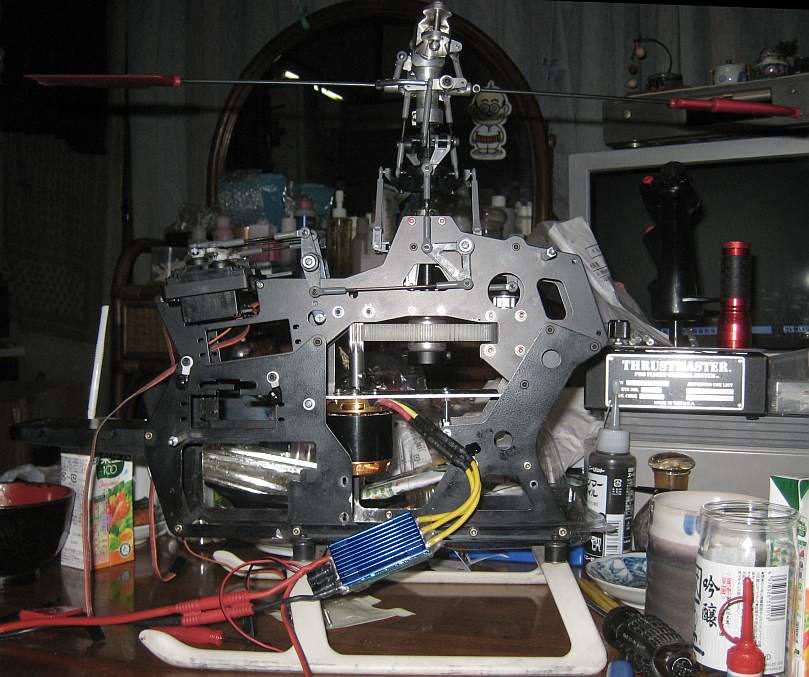 پ@پƒ
پ@پƒ
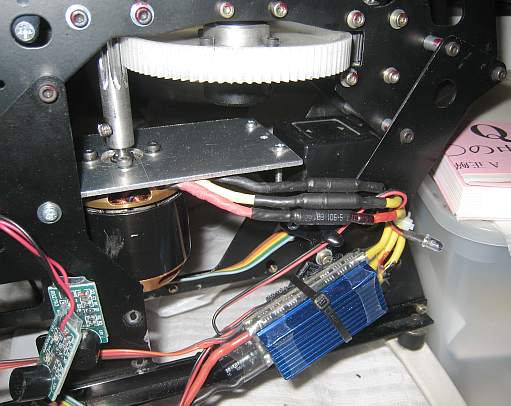 پ@پƒƒWƒƒƒCƒچ‚ًڈو‚¹‚邽‚كŒم’[•”•ھ‚ًگط‚è‚ـ‚µ‚½پB
ƒPپ[ƒuƒ‹‚جƒnƒ“ƒ_•t‚¯
—\”ُƒnƒ“ƒ_پ@پ¨پ@Œy‚•t‚¯‚ؤ‚©‚ç—n‚¯‚ؤ‚éڈَ‘ش‚إ‰ء”M‚µ‚ب‚ھ‚çƒyƒ“ƒ`‚إˆ¬‚ء‚ؤ–§’…پB
پ@پƒƒWƒƒƒCƒچ‚ًڈو‚¹‚邽‚كŒم’[•”•ھ‚ًگط‚è‚ـ‚µ‚½پB
ƒPپ[ƒuƒ‹‚جƒnƒ“ƒ_•t‚¯
—\”ُƒnƒ“ƒ_پ@پ¨پ@Œy‚•t‚¯‚ؤ‚©‚ç—n‚¯‚ؤ‚éڈَ‘ش‚إ‰ء”M‚µ‚ب‚ھ‚çƒyƒ“ƒ`‚إˆ¬‚ء‚ؤ–§’…پB
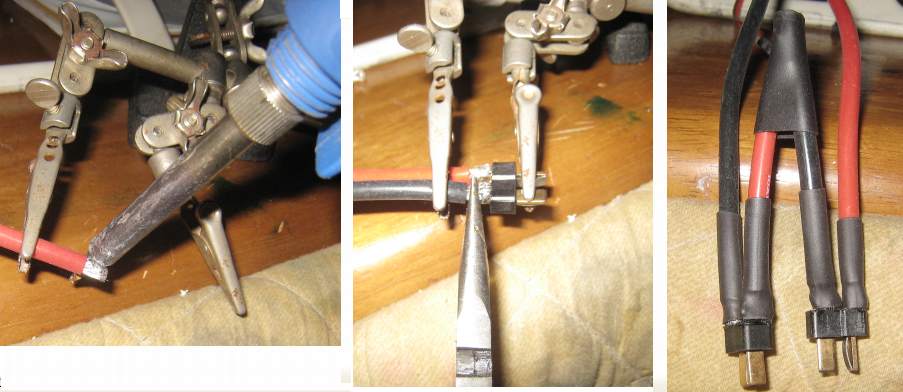 پ@پƒ
پ@پƒ
 پ@پƒ
2500g(–{‘جپ{ƒ‚پ[ƒ^پ[پ{AMPپ{ژَگM‹@پ{3ژ²ƒWƒƒƒCƒچپ{ƒTپ[ƒ{پ{پABATT)
416g(ƒeپ[ƒ‹پ{ƒ‰ƒ_پ[ƒTپ[ƒ{)
245g(ƒپƒCƒ“ƒچپ[ƒ^پ[)
Œv3161g
پE—v‚ç‚ب‚¢ƒ‚ƒm
پ@ƒGƒ“ƒWƒ“پ{ƒNƒ‰ƒbƒ`پ{ƒtƒ@ƒ“ƒJƒoپ[پ{ƒtƒ@ƒ“پF413gپ{ƒ؟
پ@ƒXƒچƒbƒgƒ‹—pƒTپ[ƒ{پF43g
پ@”R—؟پ{ƒ^ƒ“ƒNپF400پ~0.7
پ@ژَگM‹@—pBATTپF
پE‘‚¦‚郂ƒm
پ@ƒ‚پ[ƒ^پ[پF326g
پ@BATTپF380g
پ@AMPپ{ƒ؟پF18.38پ{52.5پ{ƒ؟
پ@
ƒGƒ“ƒWƒ“‚و‚èŒy‚‚ب‚è‚ـ‚·پB
پ@پƒ
2500g(–{‘جپ{ƒ‚پ[ƒ^پ[پ{AMPپ{ژَگM‹@پ{3ژ²ƒWƒƒƒCƒچپ{ƒTپ[ƒ{پ{پABATT)
416g(ƒeپ[ƒ‹پ{ƒ‰ƒ_پ[ƒTپ[ƒ{)
245g(ƒپƒCƒ“ƒچپ[ƒ^پ[)
Œv3161g
پE—v‚ç‚ب‚¢ƒ‚ƒm
پ@ƒGƒ“ƒWƒ“پ{ƒNƒ‰ƒbƒ`پ{ƒtƒ@ƒ“ƒJƒoپ[پ{ƒtƒ@ƒ“پF413gپ{ƒ؟
پ@ƒXƒچƒbƒgƒ‹—pƒTپ[ƒ{پF43g
پ@”R—؟پ{ƒ^ƒ“ƒNپF400پ~0.7
پ@ژَگM‹@—pBATTپF
پE‘‚¦‚郂ƒm
پ@ƒ‚پ[ƒ^پ[پF326g
پ@BATTپF380g
پ@AMPپ{ƒ؟پF18.38پ{52.5پ{ƒ؟
پ@
ƒGƒ“ƒWƒ“‚و‚èŒy‚‚ب‚è‚ـ‚·پB
’n–ت‚ة‚àƒچپ[ƒ^پ[‚ة‚à‚ش‚آ‚©‚ç‚ب‚‚ء‚ؤپAچ„گ«‚ج‚ ‚郌ƒCƒAƒEƒg‚ً–حچُ’†‚إ‚·پB
ƒپƒCƒ“ƒچپ[ƒ^پ[‚ج‹}Œ¸‘¬‚ً‚³‚¹‚é‚ئˆê”ش–â‘è‚ج‚و‚¤‚إ‚·پB
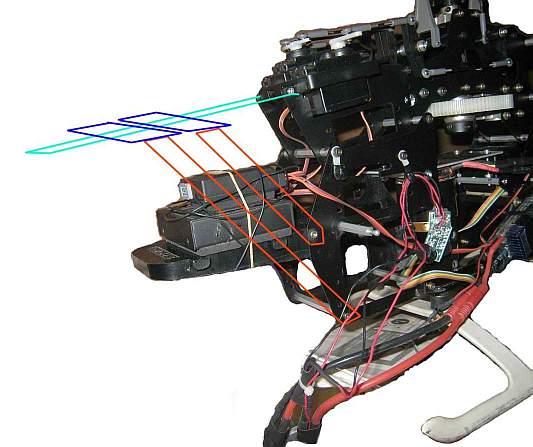 پ@پƒƒRƒŒ‚إ‚àƒچپ[ƒ^پ[‚ھƒTپ[ƒ{‚ً’@‚ˆت’u‚إ‚·پB
++++++++++++++++++
پ@پƒƒRƒŒ‚إ‚àƒچپ[ƒ^پ[‚ھƒTپ[ƒ{‚ً’@‚ˆت’u‚إ‚·پB
++++++++++++++++++
 پ@پƒ‘g‚ف—§‚ؤ
پ@پƒ‘g‚ف—§‚ؤ
 پ@پƒ
پ@پƒ
 پ@پƒ
چ¶•ûŒü‚ض‚جŒƒ‚µ‚¢ƒsƒ‹ƒGƒbƒg‰ٌ“]Œ»ڈغپB
ƒ‰ƒ_ƒٹƒ“ƒPپ[ƒW‚جƒKƒ^+‰آ“®ˆوٹO‚ض‚جƒIپ[ƒoپ[ƒnƒ“ƒO‚ئŒإ’…پ@پƒƒWƒƒƒCƒچگف’è‹tپH
•ْ”M”آ‚ج”MپB
ƒmƒCƒYپA
AMPƒ‰ƒ“ƒv‚ج•s‹K‘¥‚ب“_–إپB
ƒ‚پ[ƒ^پ[‚ض‚جگü‚ًˆê–{گط‚ء‚ؤ‚àAMP‚ھƒAپ[ƒ~ƒ“ƒO‹N“®‚·‚éپ¨ٹ댯گ«‚ھ‹ة‚ك‚ؤ‘هپB
BEC‚ض‚جƒmƒCƒYپB
‹@‘ج‚ھƒfƒJƒC‚ج‚إ’²گ®چى‹ئ‚ج“ï“_‚ ‚èپB
ƒmƒCƒY‚جƒ`ƒ‡پ[ƒNƒRƒCƒ‹پB
“d”g‹zژûچق
ƒLƒ‰ƒRƒ“
‚i‚q‚جژَگM‹@‚حپA
DSCƒTپ[ƒ{ƒRƒ“ƒgƒچپ[ƒ‹‹@”\‚جPPMگMچ†‚ً“dŒ¹‚©‚çژو“¾‚·‚邽‚كپA
BEC‚©‚ç‚جƒmƒCƒY‚ةژم‚¢‚و‚¤‚إ‚·‚ج‚إپA‚±‚ê‚ًƒRƒ“ƒfƒ“ƒTپ[‚âƒgƒچƒCƒ_ƒ‹‚âƒ`ƒ‡پ[ƒNƒRƒCƒ‹‚إ’لŒ¸‚³‚¹‚ؤ‚ف‚é‚ئŒّ‰ت‚ھ‚ ‚é‚©‚à‚µ‚ê‚ـ‚¹‚ٌپB
‚»‚ê‚ئƒtƒFƒCƒ‹ƒZپ[ƒt‚ئ‚؟‚ل‚ٌ‚ئگف’肵‚ؤ‚¨‚©‚ب‚¢‚ئ‚ـ‚¸‚»‚¤‚إ‚·پB
ƒ_ƒپ‚ب‚çƒnƒCƒyƒٹƒIƒ“‚جژَگM‹@‚إ‘خڈˆ‚µ‚و‚¤‚ئژv‚¢‚ـ‚·پB
-----------
ƒ‚پ[ƒ^پ[‚ج‰ٌ“]–\‘–‚حژَگM‹@‚ھPCM‚إ‚ ‚邽‚ك‚إ‚µ‚½پB
“dŒ¹‚ةƒ^ƒ“ƒ^ƒ‹ƒRƒ“ƒfƒ“ƒT‚ً“ü‚ê‚ؤ‚ف‚ـ‚µ‚½‚ھپA
‚ ‚ـ‚èŒّ‰ت‚ھ‚ ‚è‚ـ‚¹‚ٌ‚إ‚µ‚½پB
‚ـ‚½پA
AMP‚ج‰ء”M‚حپAƒ‰ƒ_پ[‚جŒإ’…‚ة‚و‚é‰ك‘ه“d—¬‚إ‚ ‚èپA
‚±‚ê‚ھƒ‚پ[ƒ^پ[‚ج‰ٌ“]–\‘–‚ًگ¶‚ٌ‚إ‚¨‚è‚ـ‚µ‚½پB
‘¼‚جƒTپ[ƒ{‚ج“®‚«‚ھˆ«‚¢‚±‚ئ“™‚ً•]‰؟‚µ‚آ‚آ‹C‚ھ•t‚«‚ـ‚µ‚½پB
ƒeپ[ƒ‹ƒٹƒ“ƒPپ[ƒW‚جƒIپ[ƒoپ[ƒnƒ“ƒO‚حپA
‚±‚êژ©‘ج‚جƒKƒ^‚إ‚ ‚é—v‘f‚à‹‚¢‚ئژv‚ي‚ê‚ـ‚·پB
ƒTپ[ƒ{‚جƒlƒW‚ھٹة‚ٌ‚إ‚¢‚½‚±‚ئ‚à‚ ‚è‚ـ‚µ‚½‚ھپA
‚»‚ج’ِ“x‚إ‰ًŒˆ‚إ‚«‚郂ƒm‚إ‚ح‚ب‚¢‚إ‚·پB
ƒWƒƒƒCƒچ‚ج’²گ®‚ھ‘S‚ڈo—ˆ‚ؤ‚¢‚ب‚¢‚½‚كپA
T-Rex‚جژ‚ج‚و‚¤‚ةپA
ƒXƒچƒbƒgƒ‹‚ئƒsƒbƒ`‚ج•sگ®چ‡‚ة‚و‚ء‚ؤŒƒ‚µ‚چ¶‰ٌ“]‚·‚邱‚ئ‚ھ
‚ئ‚è‚ ‚¦‚¸پA
‚ ‚ê‚ظ‚ا‰ء”M‚µ‚ؤ‚¢‚é‚ئBEC‚ج—ٍ‰»‚àŒœ”O‚³‚ê‚ـ‚·‚ج‚إپA
گ”“ْٹش‚¨‚¢‚ؤٹدژ@‚µ‚ؤ‚ف‚½‚¢‚ئژv‚¢‚ـ‚·پB
ژpگ¨•د‰»ˆت‚حŒ©‚ê‚ؤپA
‚à‚ء‚ئ‹@‘ج‚ً‹‚”›‚è•t‚¯‚ؤ‚¶‚ء‚‚èٹدژ@‚µ‚ؤ‚ف‚½‚¢‚ئژv‚¢‚ـ‚·پB
‚±‚ê‚ةچ‡‚¤ƒAƒپƒ“ƒ{“™‚ھ‚ ‚ê‚خپcپA
PCMژَگM‹@‚ھ
‚±‚±‚ـ‚إ‹ك‹——£‚إƒAƒ“ƒeƒiگü‚©‚çƒmƒCƒY‚ًڈE‚¤‚ئ‚حژv‚¦‚ب‚¢‚إ‚·پB
“d’r‚ة‚و‚é“dŒ¹‚ًژg‚¦‚خ“dŒ¹ژü‚è‚ب‚ج‚©”»•ت‚ھ•t‚‚ئژv‚ي‚ê‚ـ‚·‚ھپA
•]‰؟ژژŒ±‚ة‚¨‚¢‚ؤ‚حƒ|ƒٹƒXƒCƒbƒ`“I‚بژ©“®•œ‹Aƒqƒ…پ[ƒY‚ھ‚ ‚é‚ئ—ا‚¢‚ئژv‚ي‚ê‚ـ‚·پB
ƒmƒCƒY‚إ‚ ‚ê‚خBEC‚إ‚àڈ\•ھ‚ةƒmƒCƒY‚ً–h‚°‚é‚ئ‚حژv‚¢‚ـ‚·‚ھپA
ƒeپ[ƒ‹‚ج–â‘è‚حƒWƒƒƒCƒچ‚جٹ´“x‚ھچإ‘ه‚إ‚ ‚ء‚½‚±‚ئ‚ھ‘ه‚«‚بŒ´ˆِ‚ج‚و‚¤‚إ‚·پB
ٹ´“x‚ً‰؛‚°پAگ§Œن•‚ةگ§Œہ‚ً‚آ‚¯‚½‚肵‚ب‚¢‚ئƒ_ƒپ‚ج‚و‚¤‚إ‚·پB
ƒ‰ƒ_پ[‚جH/L(ˆع“®ٹp‹L‰¯‚ج—L–³)‚àOFF‚ة‚µ‚ـ‚µ‚½پB
‰ء‚¦‚ؤپAƒsƒbƒ`ƒX‚ئƒچƒbƒgƒ‹‚ج‚ا‚؟‚ç‚àچ‚‚ك‚ج‚و‚¤‚إ‚·پB
‘Oژز‚حپA’²گ®چد‚ف‚¾‚ء‚½‚ج‚إ‚·‚ھƒtƒ‰ƒCƒgƒ‚پ[ƒh‚جƒXƒCƒbƒ`‚ھگط‚è‘ض‚ي‚ء‚ؤ‚ـ‚µ‚½پB
Œمژز‚حپAƒ^ƒRƒپپ[ƒ^پ[‚ھ‚ ‚ê‚خ‚و‚¢‚ج‚إ‚·‚ھپA
–طگ»ƒچپ[ƒ^پ[‚إ‚·‚ج‚إƒsƒbƒ`‚ًچ‚‚ك‚ة‚µ‚ؤŒ©‚ب‚ھ‚ç‚â‚ء‚ؤ‚àƒAƒ‹’ِ“x‚ح‰آ”\‚إ‚µ‚ه‚¤پB
090516
‚إپAƒ‰ƒ_پ[‚ج’²گ®‚ً‚â‚ء‚ؤپA
“®‚©‚µ‚ؤ‚ف‚½‚ئ‚±‚ëƒXƒsƒ“ƒAƒbƒvژ‚ةژلٹ±چ¶‚ـ‚ي‚è‚ًژ¦‚µ‚ـ‚µ‚½‚ھ
ژ~‚ك‚邱‚ئ‚ھ‰آ”\‚إپA5cm‚‚ç‚¢‚جچ‚‚³‚إگ”•bٹش•‚‚©‚¹‚邱‚ئ‚ھ‚إ‚«‚ـ‚µ‚½پB
‹@‘ج‚ح‚ئ‚ؤ‚àˆہ’肵‚ؤ‚¢‚é‚و‚¤‚إ‚µ‚½پB
ƒ‰ƒ_پ[‘€چى‚ھ•K—v‚ب‚ج‚حپA
ƒ‚پ[ƒ^پ[‚جƒpƒڈپ[‚ھ‚ ‚è‚·‚¬‚é‚ج‚إƒXƒچƒbƒgƒ‹‚ھ‚ـ‚¾ژلٹ±‹‚·‚¬‚é‚ج‚ھ‰غ‘è‚إ‚·پB
ƒgƒ‰ƒbƒLƒ“ƒO‚حƒ}پ[ƒN‚ً•t‚¯‚½ƒچپ[ƒ^پ[‚ھڈ‚µڈم‚ة‚¸‚ê‚ؤ‚½‚ج‚إ—v’²گ®‚إ‚·پBپ@پƒ‚ئ‚è‚ ‚¦‚¸پAƒWƒ‡ƒCƒ“ƒg‚ًˆê‰ٌ“]•ھ’ل‚‚µ‚ئ‚«‚ـ‚µ‚½پB
ƒeپ[ƒ‹‚جƒٹƒ“ƒPپ[ƒW‚ة‚µ‚ء‚©‚è‚ئ‚µ‚½گ§Œہ‚ً•t‚¯‚邱‚ئ‚ھ•K—v‚إ‚·پB
•ت‚جگ§Œن‚ھ“ü‚è‚ـ‚·‚ج‚إپAƒgƒ‰ƒxƒ‹ƒAƒWƒƒƒXƒg‚إ‚ح‘ت–ع‚إ‚·پB
‹@ٹB“I‚ة‚à‰آ”\‚إ‚·‚ھپA
ƒwƒbƒhƒچƒbƒNƒWƒƒƒCƒچ‚ة‚à’…‚¢‚ؤ‚ـ‚·‚ج‚إپAژg‚¦‚é‚©‚ئژv‚¢‚ـ‚·پB
‚±‚جڈêچ‡پA
ژَگM‹@‚©‚çƒwƒbƒhƒچƒbƒNƒWƒƒƒCƒچ‚ًگو‚ة‚آ‚ب‚°‚鈽‚¢‚ح•ہ—ٌ‚ةگع‘±‚·‚é•K—v‚ھ‚ ‚é‚ئژv‚ي‚ê‚ـ‚·پBپƒ‚±‚جڈêچ‡3ژ²ƒWƒƒƒCƒچ‚جƒ‰ƒ_پ[‚جٹ´“x‚حƒ[ƒچپH
ƒeپ[ƒ‹‚جƒŒƒ“ƒ`‚ھگـ‚ê‚é‚ظ‚اƒlƒW‚ھŒإ’…‚µ‚ؤ‚¢‚½‚ج‚إٹ„‚ء‚ؤٹO‚µ‚ؤپAپ@پƒƒlƒW‚ھƒTƒr‚ؤ‚ـ‚µ‚½پB
گ§Œہ‚ً•t‚¯‚邽‚ك‚ة“àŒa5mm‚جگ^èJ‚جƒpƒCƒv‚ً‚ح‚كچ‚ف‚ـ‚µ‚½پB
پ@پƒ
چ¶•ûŒü‚ض‚جŒƒ‚µ‚¢ƒsƒ‹ƒGƒbƒg‰ٌ“]Œ»ڈغپB
ƒ‰ƒ_ƒٹƒ“ƒPپ[ƒW‚جƒKƒ^+‰آ“®ˆوٹO‚ض‚جƒIپ[ƒoپ[ƒnƒ“ƒO‚ئŒإ’…پ@پƒƒWƒƒƒCƒچگف’è‹tپH
•ْ”M”آ‚ج”MپB
ƒmƒCƒYپA
AMPƒ‰ƒ“ƒv‚ج•s‹K‘¥‚ب“_–إپB
ƒ‚پ[ƒ^پ[‚ض‚جگü‚ًˆê–{گط‚ء‚ؤ‚àAMP‚ھƒAپ[ƒ~ƒ“ƒO‹N“®‚·‚éپ¨ٹ댯گ«‚ھ‹ة‚ك‚ؤ‘هپB
BEC‚ض‚جƒmƒCƒYپB
‹@‘ج‚ھƒfƒJƒC‚ج‚إ’²گ®چى‹ئ‚ج“ï“_‚ ‚èپB
ƒmƒCƒY‚جƒ`ƒ‡پ[ƒNƒRƒCƒ‹پB
“d”g‹zژûچق
ƒLƒ‰ƒRƒ“
‚i‚q‚جژَگM‹@‚حپA
DSCƒTپ[ƒ{ƒRƒ“ƒgƒچپ[ƒ‹‹@”\‚جPPMگMچ†‚ً“dŒ¹‚©‚çژو“¾‚·‚邽‚كپA
BEC‚©‚ç‚جƒmƒCƒY‚ةژم‚¢‚و‚¤‚إ‚·‚ج‚إپA‚±‚ê‚ًƒRƒ“ƒfƒ“ƒTپ[‚âƒgƒچƒCƒ_ƒ‹‚âƒ`ƒ‡پ[ƒNƒRƒCƒ‹‚إ’لŒ¸‚³‚¹‚ؤ‚ف‚é‚ئŒّ‰ت‚ھ‚ ‚é‚©‚à‚µ‚ê‚ـ‚¹‚ٌپB
‚»‚ê‚ئƒtƒFƒCƒ‹ƒZپ[ƒt‚ئ‚؟‚ل‚ٌ‚ئگف’肵‚ؤ‚¨‚©‚ب‚¢‚ئ‚ـ‚¸‚»‚¤‚إ‚·پB
ƒ_ƒپ‚ب‚çƒnƒCƒyƒٹƒIƒ“‚جژَگM‹@‚إ‘خڈˆ‚µ‚و‚¤‚ئژv‚¢‚ـ‚·پB
-----------
ƒ‚پ[ƒ^پ[‚ج‰ٌ“]–\‘–‚حژَگM‹@‚ھPCM‚إ‚ ‚邽‚ك‚إ‚µ‚½پB
“dŒ¹‚ةƒ^ƒ“ƒ^ƒ‹ƒRƒ“ƒfƒ“ƒT‚ً“ü‚ê‚ؤ‚ف‚ـ‚µ‚½‚ھپA
‚ ‚ـ‚èŒّ‰ت‚ھ‚ ‚è‚ـ‚¹‚ٌ‚إ‚µ‚½پB
‚ـ‚½پA
AMP‚ج‰ء”M‚حپAƒ‰ƒ_پ[‚جŒإ’…‚ة‚و‚é‰ك‘ه“d—¬‚إ‚ ‚èپA
‚±‚ê‚ھƒ‚پ[ƒ^پ[‚ج‰ٌ“]–\‘–‚ًگ¶‚ٌ‚إ‚¨‚è‚ـ‚µ‚½پB
‘¼‚جƒTپ[ƒ{‚ج“®‚«‚ھˆ«‚¢‚±‚ئ“™‚ً•]‰؟‚µ‚آ‚آ‹C‚ھ•t‚«‚ـ‚µ‚½پB
ƒeپ[ƒ‹ƒٹƒ“ƒPپ[ƒW‚جƒIپ[ƒoپ[ƒnƒ“ƒO‚حپA
‚±‚êژ©‘ج‚جƒKƒ^‚إ‚ ‚é—v‘f‚à‹‚¢‚ئژv‚ي‚ê‚ـ‚·پB
ƒTپ[ƒ{‚جƒlƒW‚ھٹة‚ٌ‚إ‚¢‚½‚±‚ئ‚à‚ ‚è‚ـ‚µ‚½‚ھپA
‚»‚ج’ِ“x‚إ‰ًŒˆ‚إ‚«‚郂ƒm‚إ‚ح‚ب‚¢‚إ‚·پB
ƒWƒƒƒCƒچ‚ج’²گ®‚ھ‘S‚ڈo—ˆ‚ؤ‚¢‚ب‚¢‚½‚كپA
T-Rex‚جژ‚ج‚و‚¤‚ةپA
ƒXƒچƒbƒgƒ‹‚ئƒsƒbƒ`‚ج•sگ®چ‡‚ة‚و‚ء‚ؤŒƒ‚µ‚چ¶‰ٌ“]‚·‚邱‚ئ‚ھ
‚ئ‚è‚ ‚¦‚¸پA
‚ ‚ê‚ظ‚ا‰ء”M‚µ‚ؤ‚¢‚é‚ئBEC‚ج—ٍ‰»‚àŒœ”O‚³‚ê‚ـ‚·‚ج‚إپA
گ”“ْٹش‚¨‚¢‚ؤٹدژ@‚µ‚ؤ‚ف‚½‚¢‚ئژv‚¢‚ـ‚·پB
ژpگ¨•د‰»ˆت‚حŒ©‚ê‚ؤپA
‚à‚ء‚ئ‹@‘ج‚ً‹‚”›‚è•t‚¯‚ؤ‚¶‚ء‚‚èٹدژ@‚µ‚ؤ‚ف‚½‚¢‚ئژv‚¢‚ـ‚·پB
‚±‚ê‚ةچ‡‚¤ƒAƒپƒ“ƒ{“™‚ھ‚ ‚ê‚خپcپA
PCMژَگM‹@‚ھ
‚±‚±‚ـ‚إ‹ك‹——£‚إƒAƒ“ƒeƒiگü‚©‚çƒmƒCƒY‚ًڈE‚¤‚ئ‚حژv‚¦‚ب‚¢‚إ‚·پB
“d’r‚ة‚و‚é“dŒ¹‚ًژg‚¦‚خ“dŒ¹ژü‚è‚ب‚ج‚©”»•ت‚ھ•t‚‚ئژv‚ي‚ê‚ـ‚·‚ھپA
•]‰؟ژژŒ±‚ة‚¨‚¢‚ؤ‚حƒ|ƒٹƒXƒCƒbƒ`“I‚بژ©“®•œ‹Aƒqƒ…پ[ƒY‚ھ‚ ‚é‚ئ—ا‚¢‚ئژv‚ي‚ê‚ـ‚·پB
ƒmƒCƒY‚إ‚ ‚ê‚خBEC‚إ‚àڈ\•ھ‚ةƒmƒCƒY‚ً–h‚°‚é‚ئ‚حژv‚¢‚ـ‚·‚ھپA
ƒeپ[ƒ‹‚ج–â‘è‚حƒWƒƒƒCƒچ‚جٹ´“x‚ھچإ‘ه‚إ‚ ‚ء‚½‚±‚ئ‚ھ‘ه‚«‚بŒ´ˆِ‚ج‚و‚¤‚إ‚·پB
ٹ´“x‚ً‰؛‚°پAگ§Œن•‚ةگ§Œہ‚ً‚آ‚¯‚½‚肵‚ب‚¢‚ئƒ_ƒپ‚ج‚و‚¤‚إ‚·پB
ƒ‰ƒ_پ[‚جH/L(ˆع“®ٹp‹L‰¯‚ج—L–³)‚àOFF‚ة‚µ‚ـ‚µ‚½پB
‰ء‚¦‚ؤپAƒsƒbƒ`ƒX‚ئƒچƒbƒgƒ‹‚ج‚ا‚؟‚ç‚àچ‚‚ك‚ج‚و‚¤‚إ‚·پB
‘Oژز‚حپA’²گ®چد‚ف‚¾‚ء‚½‚ج‚إ‚·‚ھƒtƒ‰ƒCƒgƒ‚پ[ƒh‚جƒXƒCƒbƒ`‚ھگط‚è‘ض‚ي‚ء‚ؤ‚ـ‚µ‚½پB
Œمژز‚حپAƒ^ƒRƒپپ[ƒ^پ[‚ھ‚ ‚ê‚خ‚و‚¢‚ج‚إ‚·‚ھپA
–طگ»ƒچپ[ƒ^پ[‚إ‚·‚ج‚إƒsƒbƒ`‚ًچ‚‚ك‚ة‚µ‚ؤŒ©‚ب‚ھ‚ç‚â‚ء‚ؤ‚àƒAƒ‹’ِ“x‚ح‰آ”\‚إ‚µ‚ه‚¤پB
090516
‚إپAƒ‰ƒ_پ[‚ج’²گ®‚ً‚â‚ء‚ؤپA
“®‚©‚µ‚ؤ‚ف‚½‚ئ‚±‚ëƒXƒsƒ“ƒAƒbƒvژ‚ةژلٹ±چ¶‚ـ‚ي‚è‚ًژ¦‚µ‚ـ‚µ‚½‚ھ
ژ~‚ك‚邱‚ئ‚ھ‰آ”\‚إپA5cm‚‚ç‚¢‚جچ‚‚³‚إگ”•bٹش•‚‚©‚¹‚邱‚ئ‚ھ‚إ‚«‚ـ‚µ‚½پB
‹@‘ج‚ح‚ئ‚ؤ‚àˆہ’肵‚ؤ‚¢‚é‚و‚¤‚إ‚µ‚½پB
ƒ‰ƒ_پ[‘€چى‚ھ•K—v‚ب‚ج‚حپA
ƒ‚پ[ƒ^پ[‚جƒpƒڈپ[‚ھ‚ ‚è‚·‚¬‚é‚ج‚إƒXƒچƒbƒgƒ‹‚ھ‚ـ‚¾ژلٹ±‹‚·‚¬‚é‚ج‚ھ‰غ‘è‚إ‚·پB
ƒgƒ‰ƒbƒLƒ“ƒO‚حƒ}پ[ƒN‚ً•t‚¯‚½ƒچپ[ƒ^پ[‚ھڈ‚µڈم‚ة‚¸‚ê‚ؤ‚½‚ج‚إ—v’²گ®‚إ‚·پBپ@پƒ‚ئ‚è‚ ‚¦‚¸پAƒWƒ‡ƒCƒ“ƒg‚ًˆê‰ٌ“]•ھ’ل‚‚µ‚ئ‚«‚ـ‚µ‚½پB
ƒeپ[ƒ‹‚جƒٹƒ“ƒPپ[ƒW‚ة‚µ‚ء‚©‚è‚ئ‚µ‚½گ§Œہ‚ً•t‚¯‚邱‚ئ‚ھ•K—v‚إ‚·پB
•ت‚جگ§Œن‚ھ“ü‚è‚ـ‚·‚ج‚إپAƒgƒ‰ƒxƒ‹ƒAƒWƒƒƒXƒg‚إ‚ح‘ت–ع‚إ‚·پB
‹@ٹB“I‚ة‚à‰آ”\‚إ‚·‚ھپA
ƒwƒbƒhƒچƒbƒNƒWƒƒƒCƒچ‚ة‚à’…‚¢‚ؤ‚ـ‚·‚ج‚إپAژg‚¦‚é‚©‚ئژv‚¢‚ـ‚·پB
‚±‚جڈêچ‡پA
ژَگM‹@‚©‚çƒwƒbƒhƒچƒbƒNƒWƒƒƒCƒچ‚ًگو‚ة‚آ‚ب‚°‚鈽‚¢‚ح•ہ—ٌ‚ةگع‘±‚·‚é•K—v‚ھ‚ ‚é‚ئژv‚ي‚ê‚ـ‚·پBپƒ‚±‚جڈêچ‡3ژ²ƒWƒƒƒCƒچ‚جƒ‰ƒ_پ[‚جٹ´“x‚حƒ[ƒچپH
ƒeپ[ƒ‹‚جƒŒƒ“ƒ`‚ھگـ‚ê‚é‚ظ‚اƒlƒW‚ھŒإ’…‚µ‚ؤ‚¢‚½‚ج‚إٹ„‚ء‚ؤٹO‚µ‚ؤپAپ@پƒƒlƒW‚ھƒTƒr‚ؤ‚ـ‚µ‚½پB
گ§Œہ‚ً•t‚¯‚邽‚ك‚ة“àŒa5mm‚جگ^èJ‚جƒpƒCƒv‚ً‚ح‚كچ‚ف‚ـ‚µ‚½پB
 پ@پƒ
ƒچپ[ƒ^پ[‚ئ‚جٹضŒW
چ¶‚ھˆê”ش‘O‚ة“|‚ê‚ؤ‚«‚½ڈَ‘ش‚ب‚ج‚إ‚·‚ھپA
ƒsƒbƒ`‚جڈم‚ھ‚è‚·‚¬‚حƒٹƒ“ƒPپ[ƒW‚âƒ}ƒXƒgƒXƒgƒbƒpپ[‚إگ§Œہ‰آ”\‚إ‚·پB
ƒXƒڈƒbƒVƒ…ƒvƒŒپ[ƒg‚ج‘OŒX‚àگ§Œہ‚إ‚«‚½‚çپA‚ئژv‚¢‚ـ‚·پB
گع’nژ‚حƒsƒbƒ`‚ھ–w‚اƒ[ƒچ‚ئŒ©‚ê‚خ‰E‚جژتگ^’ِ“x‚إ‚µ‚ه‚¤پB
گ^‚ٌ’†‚جژتگ^‚‚ç‚¢‚حچs‚‚©‚à’m‚ê‚ـ‚¹‚ٌپB
پ@پƒ
ƒچپ[ƒ^پ[‚ئ‚جٹضŒW
چ¶‚ھˆê”ش‘O‚ة“|‚ê‚ؤ‚«‚½ڈَ‘ش‚ب‚ج‚إ‚·‚ھپA
ƒsƒbƒ`‚جڈم‚ھ‚è‚·‚¬‚حƒٹƒ“ƒPپ[ƒW‚âƒ}ƒXƒgƒXƒgƒbƒpپ[‚إگ§Œہ‰آ”\‚إ‚·پB
ƒXƒڈƒbƒVƒ…ƒvƒŒپ[ƒg‚ج‘OŒX‚àگ§Œہ‚إ‚«‚½‚çپA‚ئژv‚¢‚ـ‚·پB
گع’nژ‚حƒsƒbƒ`‚ھ–w‚اƒ[ƒچ‚ئŒ©‚ê‚خ‰E‚جژتگ^’ِ“x‚إ‚µ‚ه‚¤پB
گ^‚ٌ’†‚جژتگ^‚‚ç‚¢‚حچs‚‚©‚à’m‚ê‚ـ‚¹‚ٌپB
 پ@پƒ
پ@پƒ
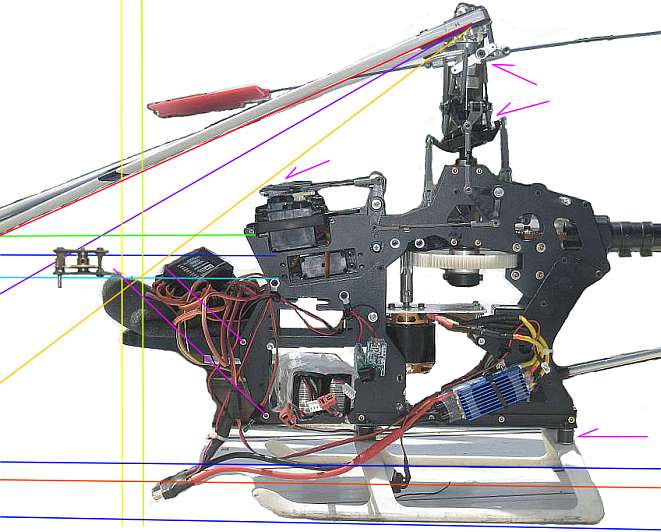 پ@پƒ
‚±‚ٌ‚بٹ´‚¶‚ة‚ب‚è‚ـ‚µ‚½پB
پ@پƒ
‚±‚ٌ‚بٹ´‚¶‚ة‚ب‚è‚ـ‚µ‚½پB
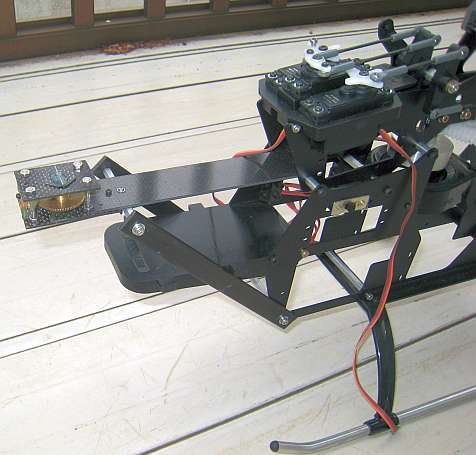 پ@پƒ
ƒJپ[ƒ{ƒ“”آ‚ح2mmŒْ‚إ‹‚¢‚إ‚·‚ھپAƒٹƒu“Iچ\‘¢‚ً‚آ‚¯‚ؤ•â‹‚إ‚·پB
پ@پƒ
ƒJپ[ƒ{ƒ“”آ‚ح2mmŒْ‚إ‹‚¢‚إ‚·‚ھپAƒٹƒu“Iچ\‘¢‚ً‚آ‚¯‚ؤ•â‹‚إ‚·پB
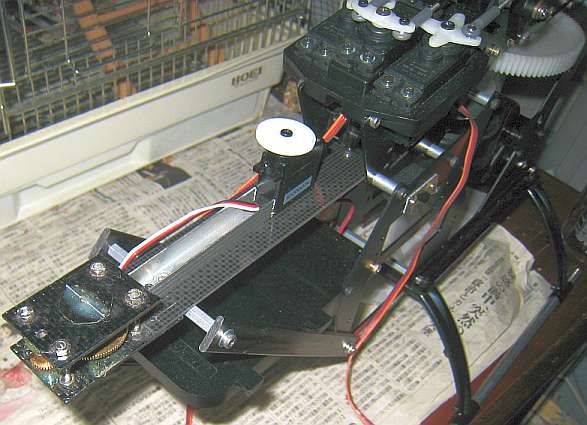 پ@پƒ
ƒmپ[ƒ}ƒ‹‚ج‹@‘ج‚إ‚حپA
ƒzƒoƒٹƒ“ƒO‚إƒsƒbƒ`‚ح5پ`6پ‹ƒRƒŒƒNƒeƒBƒuچإ‘ه‚إ11پ`12پ‹‚ئ‚ب‚èپA
ƒچپ[ƒ^پ[‰ٌ“]گ”‚حŒإ’è‚إ—ا‚¢‚ح‚¸‚إ‚·پB
‚±‚ê‚إƒyƒCƒچپ[ƒh‚ھڈم‚ھ‚é‚ئپAڈم‚ةƒVƒtƒg‚·‚éٹ´‚¶‚إ‚·پB
•پ’تپA
ƒzƒoƒٹƒ“ƒO‚إ1280پ`1500RPM‚‚ç‚¢‚ھژg‚ي‚ê‚é‚و‚¤‚إ‚·‚ھپA
ƒGƒ‹ƒS50‚جڈêچ‡پAƒzƒoƒٹƒ“ƒO‚إ‚ح1350پ`1450RPM‚إڈم‹َ‚إ‚حƒKƒoƒiپ[‚ب‚ا‚إˆغژ‚³‚ê‚é‚©‚؟‚ه‚ء‚ئچ‚‚ك‚جگف’è‚ج‚و‚¤‚إ‚·پB
ƒچپ[ƒ^پ[‰ٌ“]گ”‚حپA—¬‘ج“I‚ة‚à‹“x“I‚ة‰آ”\‚ب”حˆح‚إ‚©‚ب‚èچ‚‚ڈo—ˆ‚ـ‚·پB
‰¹‚©‚çFFT‚إ‚àƒ`ƒFƒbƒN‚إ‚«‚»‚¤‚إ‚·‚ھ
گ³ٹm‚ة‚حƒچپ[ƒ^پ[‰ٌ“]گ”Œv‚ھ•K—v‚»‚¤‚إ‚·پB
چإڈ‰‚ج“]“|‚جƒVپ[ƒ“‚حپAچ⓹‚©‚ç‚جڈمڈ¸‚ةژ¸”s‚إ‚·پB
‚µ‚©‚àپAƒeپ[ƒ‹ƒچپ[ƒ^پ[‚ھ‹t“]‚µ‚ؤ‚ـ‚µ‚½پB
ژں‚ج‚حپAژ،‚µ‚ؤ•‚ڈم‚µ‚ـ‚µ‚½‚ھپAƒWƒƒƒCƒچ‚جٹ´“x‚ھچ‚‚·‚¬‚ج‚و‚¤‚إ‚·پB
–¾‚邉f‚ء‚ؤ‚ـ‚·‚ھپA19ژ‚²‚ë‚ج—[•û‚إ‚·‚ج‚إAMP‚جLED‚جŒُ‚ھ‹‚”½ژث‚µ‚ؤ‚ـ‚·پB
“®‰و
ƒKƒoƒiپ[ƒ‚پ[ƒh‚إ16500RPMˆبڈم‚ھ‰ٌ‚¹‚½‚ç‚â‚ء‚ؤ‚ف‚½‚¢‚إ‚·پB
پ¨
GY-401‚ئ‚¢‚¤چ‚گ«”\‚بƒwƒbƒhƒچƒbƒNƒWƒƒƒCƒچ‚ً–ع•W‚ةگ§چى‚³‚ꂽGU-210پ@پƒ6990‰~
ƒRƒŒ‚ً‰،•t‚¯‚إ‚·پB
پ@پƒ
ƒmپ[ƒ}ƒ‹‚ج‹@‘ج‚إ‚حپA
ƒzƒoƒٹƒ“ƒO‚إƒsƒbƒ`‚ح5پ`6پ‹ƒRƒŒƒNƒeƒBƒuچإ‘ه‚إ11پ`12پ‹‚ئ‚ب‚èپA
ƒچپ[ƒ^پ[‰ٌ“]گ”‚حŒإ’è‚إ—ا‚¢‚ح‚¸‚إ‚·پB
‚±‚ê‚إƒyƒCƒچپ[ƒh‚ھڈم‚ھ‚é‚ئپAڈم‚ةƒVƒtƒg‚·‚éٹ´‚¶‚إ‚·پB
•پ’تپA
ƒzƒoƒٹƒ“ƒO‚إ1280پ`1500RPM‚‚ç‚¢‚ھژg‚ي‚ê‚é‚و‚¤‚إ‚·‚ھپA
ƒGƒ‹ƒS50‚جڈêچ‡پAƒzƒoƒٹƒ“ƒO‚إ‚ح1350پ`1450RPM‚إڈم‹َ‚إ‚حƒKƒoƒiپ[‚ب‚ا‚إˆغژ‚³‚ê‚é‚©‚؟‚ه‚ء‚ئچ‚‚ك‚جگف’è‚ج‚و‚¤‚إ‚·پB
ƒچپ[ƒ^پ[‰ٌ“]گ”‚حپA—¬‘ج“I‚ة‚à‹“x“I‚ة‰آ”\‚ب”حˆح‚إ‚©‚ب‚èچ‚‚ڈo—ˆ‚ـ‚·پB
‰¹‚©‚çFFT‚إ‚àƒ`ƒFƒbƒN‚إ‚«‚»‚¤‚إ‚·‚ھ
گ³ٹm‚ة‚حƒچپ[ƒ^پ[‰ٌ“]گ”Œv‚ھ•K—v‚»‚¤‚إ‚·پB
چإڈ‰‚ج“]“|‚جƒVپ[ƒ“‚حپAچ⓹‚©‚ç‚جڈمڈ¸‚ةژ¸”s‚إ‚·پB
‚µ‚©‚àپAƒeپ[ƒ‹ƒچپ[ƒ^پ[‚ھ‹t“]‚µ‚ؤ‚ـ‚µ‚½پB
ژں‚ج‚حپAژ،‚µ‚ؤ•‚ڈم‚µ‚ـ‚µ‚½‚ھپAƒWƒƒƒCƒچ‚جٹ´“x‚ھچ‚‚·‚¬‚ج‚و‚¤‚إ‚·پB
–¾‚邉f‚ء‚ؤ‚ـ‚·‚ھپA19ژ‚²‚ë‚ج—[•û‚إ‚·‚ج‚إAMP‚جLED‚جŒُ‚ھ‹‚”½ژث‚µ‚ؤ‚ـ‚·پB
“®‰و
ƒKƒoƒiپ[ƒ‚پ[ƒh‚إ16500RPMˆبڈم‚ھ‰ٌ‚¹‚½‚ç‚â‚ء‚ؤ‚ف‚½‚¢‚إ‚·پB
پ¨
GY-401‚ئ‚¢‚¤چ‚گ«”\‚بƒwƒbƒhƒچƒbƒNƒWƒƒƒCƒچ‚ً–ع•W‚ةگ§چى‚³‚ꂽGU-210پ@پƒ6990‰~
ƒRƒŒ‚ً‰،•t‚¯‚إ‚·پB

 پ@پƒ
پ@پƒ


 پƒڈu’…‚إ‰¼ژ~‚ك‚µ‚ؤپA5•ھ‚جƒGƒ|ƒLƒV‚ً—¬‚µچ‚ف‚إ—}‚¦‚ب‚ھ‚çچd‰»
ƒlƒNƒTƒX‚S‚U‚إپA‹َژBƒXƒLƒbƒhپ{‚R‚j‚‡‚ًژ‚؟ڈم‚°‚邱‚ئ‚ھ‰آ”\‚إ‚ ‚é‚ئŒ¾‚¤ڈî•ٌ“üژè‚ة‚ؤپA—]—T‚»‚¤‚إ‚·پB
ƒlƒNƒTƒX—p‰ٌ“ھƒwƒbƒh‚àچى‚éپH
‘«’·‰»پB
ƒGƒ‹ƒS50‚جڈêچ‡‚حپAƒKƒoƒiپ[ƒ‚پ[ƒh‚ھڈ\•ھ‰آ”\‚إ‚ ‚邱‚ئ‚ھ”»‚è‚ـ‚µ‚½‚ج‚إپA
—‘z“I‚بƒeپ[ƒ‹‚ج‰ٌ“]گ”‚©‚ç“Kگ³ƒXƒچƒbƒgƒ‹‚ًŒˆ‚ك‚½‚¢‚إ‚·پB
‰ٌ“]گ”‚ًŒ©‚é‚ج‚ة‚حپAŒُ‚ھ—ا‚¢‚إ‚·پB
”’”M“d‹…پ¨‰آژ‹ŒُƒJƒbƒgŒ^‚جƒtƒHƒgƒZƒ“ƒTپ[‚©‚çPC‚ج‰¹گ؛“ü—حƒCƒ“ƒ^پ[ƒtƒFƒCƒXپ¨FFT‰ًگحپB
ƒeپ[ƒ‹‚جƒuƒŒپ[ƒh‚ًŒ©‚éپB
1450پ~2پ~5/60پپ241H‚ڑ
‚ـ‚¸‚حپA–³•‰‰×‚إŒ©گد‚à‚è‚ـ‚·پB
پƒڈu’…‚إ‰¼ژ~‚ك‚µ‚ؤپA5•ھ‚جƒGƒ|ƒLƒV‚ً—¬‚µچ‚ف‚إ—}‚¦‚ب‚ھ‚çچd‰»
ƒlƒNƒTƒX‚S‚U‚إپA‹َژBƒXƒLƒbƒhپ{‚R‚j‚‡‚ًژ‚؟ڈم‚°‚邱‚ئ‚ھ‰آ”\‚إ‚ ‚é‚ئŒ¾‚¤ڈî•ٌ“üژè‚ة‚ؤپA—]—T‚»‚¤‚إ‚·پB
ƒlƒNƒTƒX—p‰ٌ“ھƒwƒbƒh‚àچى‚éپH
‘«’·‰»پB
ƒGƒ‹ƒS50‚جڈêچ‡‚حپAƒKƒoƒiپ[ƒ‚پ[ƒh‚ھڈ\•ھ‰آ”\‚إ‚ ‚邱‚ئ‚ھ”»‚è‚ـ‚µ‚½‚ج‚إپA
—‘z“I‚بƒeپ[ƒ‹‚ج‰ٌ“]گ”‚©‚ç“Kگ³ƒXƒچƒbƒgƒ‹‚ًŒˆ‚ك‚½‚¢‚إ‚·پB
‰ٌ“]گ”‚ًŒ©‚é‚ج‚ة‚حپAŒُ‚ھ—ا‚¢‚إ‚·پB
”’”M“d‹…پ¨‰آژ‹ŒُƒJƒbƒgŒ^‚جƒtƒHƒgƒZƒ“ƒTپ[‚©‚çPC‚ج‰¹گ؛“ü—حƒCƒ“ƒ^پ[ƒtƒFƒCƒXپ¨FFT‰ًگحپB
ƒeپ[ƒ‹‚جƒuƒŒپ[ƒh‚ًŒ©‚éپB
1450پ~2پ~5/60پپ241H‚ڑ
‚ـ‚¸‚حپA–³•‰‰×‚إŒ©گد‚à‚è‚ـ‚·پB
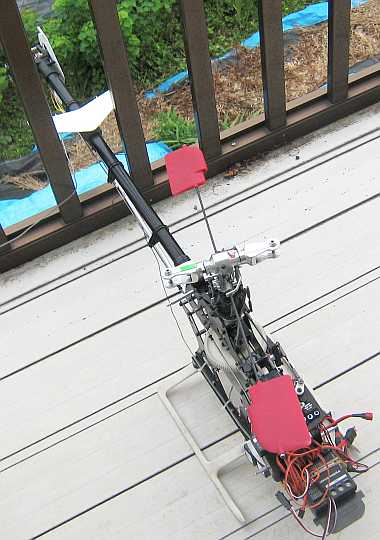 پ@پƒŒإ’è
ƒRƒŒƒNƒeƒBƒuƒXƒeƒBƒbƒN’†—§پFƒXƒچƒbƒgƒ‹60%
‰،ژ²پF1mSec/Div
3.6‰ٌ“]10Div
360Hzپ¨rpm
ƒeپ[ƒ‹ƒچپ[ƒ^پ[‰ٌ“]گ”پپ10800rpm
ƒپƒCƒ“ƒچپ[ƒ^پ[‰ٌ“]گ”پپ2084rpm
ƒ‚پ[ƒ^پ[‰ٌ“]گ”پپ22924rpmپ@پ@
پc‚ئ‚ٌ‚إ‚à‚ب‚چ‚‰ٌ“]‚إ‚·پB
پ@پƒŒإ’è
ƒRƒŒƒNƒeƒBƒuƒXƒeƒBƒbƒN’†—§پFƒXƒچƒbƒgƒ‹60%
‰،ژ²پF1mSec/Div
3.6‰ٌ“]10Div
360Hzپ¨rpm
ƒeپ[ƒ‹ƒچپ[ƒ^پ[‰ٌ“]گ”پپ10800rpm
ƒپƒCƒ“ƒچپ[ƒ^پ[‰ٌ“]گ”پپ2084rpm
ƒ‚پ[ƒ^پ[‰ٌ“]گ”پپ22924rpmپ@پ@
پc‚ئ‚ٌ‚إ‚à‚ب‚چ‚‰ٌ“]‚إ‚·پB
 پƒ’ل‚ك‚ج‰ٌ“]‚ج‰و‘œ
‹@‘ج‚ًŒإ’肵‚ؤƒچپ[ƒ^پ[‚ً•t‚¯‚ؤ‚ف‚ؤ‚ف‚½‚¢‚إ‚·پB
’g‚©‚¢‚ج‚إFAN‚جژو‚è•t‚ً‚µ‚ـ‚µ‚½.
پƒ’ل‚ك‚ج‰ٌ“]‚ج‰و‘œ
‹@‘ج‚ًŒإ’肵‚ؤƒچپ[ƒ^پ[‚ً•t‚¯‚ؤ‚ف‚ؤ‚ف‚½‚¢‚إ‚·پB
’g‚©‚¢‚ج‚إFAN‚جژو‚è•t‚ً‚µ‚ـ‚µ‚½.
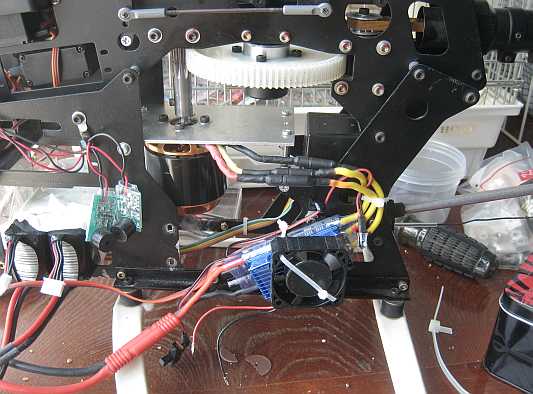

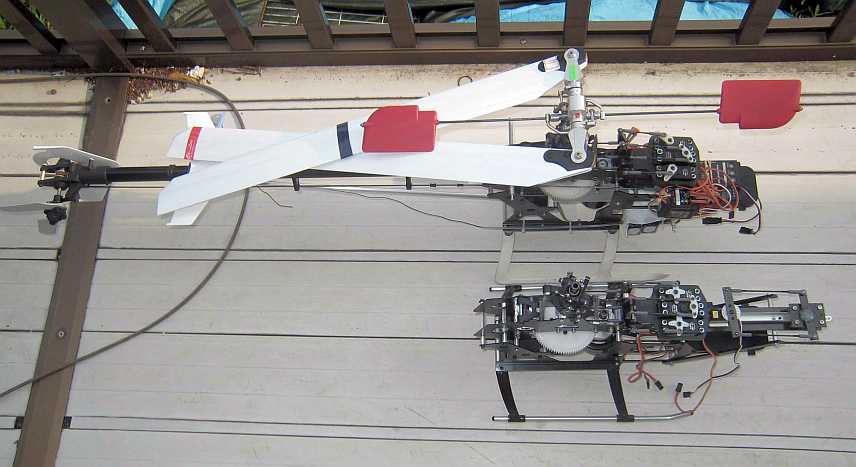 ƒeپ[ƒ‹‚ح‹¤—p‚ة‚·‚é‚ج‚إپA
ƒwƒbƒhƒچƒbƒNƒWƒƒƒCƒچ‚ةŒ©چ‡‚¤‚و‚¤‚ةƒuپ[ƒ€‚ةƒfƒWƒ^ƒ‹ƒTپ[ƒ{‚ً•t‚¯‚é‚و‚¤‚ةچl‚¦‚ؤ‚¨‚è‚ـ‚·پBپƒƒچƒbƒhگط’fگعچ‡پB
ƒeپ[ƒ‹‚ح‹¤—p‚ة‚·‚é‚ج‚إپA
ƒwƒbƒhƒچƒbƒNƒWƒƒƒCƒچ‚ةŒ©چ‡‚¤‚و‚¤‚ةƒuپ[ƒ€‚ةƒfƒWƒ^ƒ‹ƒTپ[ƒ{‚ً•t‚¯‚é‚و‚¤‚ةچl‚¦‚ؤ‚¨‚è‚ـ‚·پBپƒƒچƒbƒhگط’fگعچ‡پB
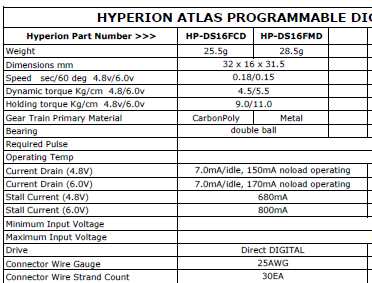 پƒƒeپ[ƒ‹—pƒfƒWƒ^ƒ‹ƒTپ[ƒ{پBFCDپF3280‰~
T-Rex600—p‚ھچ‡’v‚µ‚ـ‚µ‚½پB
پƒƒeپ[ƒ‹—pƒfƒWƒ^ƒ‹ƒTپ[ƒ{پBFCDپF3280‰~
T-Rex600—p‚ھچ‡’v‚µ‚ـ‚µ‚½پB
 پƒ
ƒTپ[ƒ{ƒ}ƒEƒ“ƒg‚و‚èڈ¬‚³‚¢‚½‚ك1mmŒْ‚جABS”آ‚إ‚‚ء‚آ‚¯‚ـ‚µ‚½پB
پƒ
ƒTپ[ƒ{ƒ}ƒEƒ“ƒg‚و‚èڈ¬‚³‚¢‚½‚ك1mmŒْ‚جABS”آ‚إ‚‚ء‚آ‚¯‚ـ‚µ‚½پB
 پƒ
‹آٹp—p‚جƒTپ[ƒ{‚جژو‚è•t‚¯‚ح’·‚¢‚±‚ئ”Y‚ٌ‚إ‚ـ‚µ‚½‚ھپA
ƒTپ[ƒ{ƒzپ[ƒ“‚ًٹر’ت‚³‚¹‚邱‚ئ‚ة‚µ‚ؤپA
ƒTپ[ƒ{‚حƒGƒ|ƒLƒV‚إŒإ’è‚إ‚·پB
پƒ
‹آٹp—p‚جƒTپ[ƒ{‚جژو‚è•t‚¯‚ح’·‚¢‚±‚ئ”Y‚ٌ‚إ‚ـ‚µ‚½‚ھپA
ƒTپ[ƒ{ƒzپ[ƒ“‚ًٹر’ت‚³‚¹‚邱‚ئ‚ة‚µ‚ؤپA
ƒTپ[ƒ{‚حƒGƒ|ƒLƒV‚إŒإ’è‚إ‚·پB
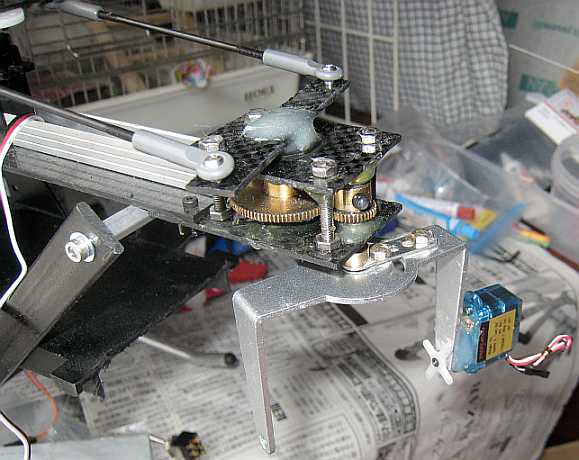 پƒ
پƒ
 پ@پƒ
ƒچپ[ƒ^پ[‚ئ‚جڈص“ث‚جٹ댯گ«‚ج‚½‚كƒچپ[ƒ}ƒEƒ“ƒg‚ة‘خ‰‚³‚¹‚ـ‚µ‚½پBپƒ‹êڈa‚ج‘I‘ًپB
پ@پƒ
ƒچپ[ƒ^پ[‚ئ‚جڈص“ث‚جٹ댯گ«‚ج‚½‚كƒچپ[ƒ}ƒEƒ“ƒg‚ة‘خ‰‚³‚¹‚ـ‚µ‚½پBپƒ‹êڈa‚ج‘I‘ًپB
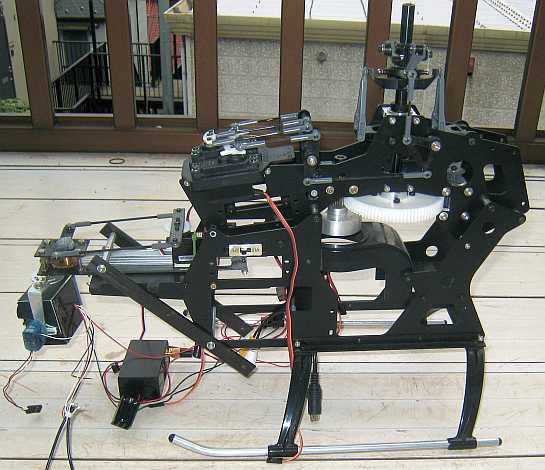 پ@پƒƒچپ[ƒ}ƒEƒ“ƒg
پ@پƒƒچپ[ƒ}ƒEƒ“ƒg
---------------------
++++++++++++++++++
ƒhƒ‰ƒSƒ“ƒtƒ‰ƒC‚ئ‚¢‚¤‚ج‚ً”ƒ‚¢‚ـ‚µ‚½
‚إپA‹َژBƒeƒXƒg‚ء‚—‚—
 پ@پƒ
“d”g‚حڈم‚جٹK‚جPC‚جƒgƒR‚ة”ٍ‚خ‚µ‚ـ‚µ‚½پB
پ@پƒ
“d”g‚حڈم‚جٹK‚جPC‚جƒgƒR‚ة”ٍ‚خ‚µ‚ـ‚µ‚½پB
 پ@پƒƒhƒ‰ƒSƒ“ƒtƒ‰ƒC‹َژBƒeƒXƒg
++++++++++++++++++
ƒڈ‚èƒPƒ‰‚إ‚·پB
ƒLƒƒƒٹƒoپ[120‚ج•û‚ھˆê‰ٌ‚èڈ¬‚³‚¢‚إ‚·پB
پ@پƒƒhƒ‰ƒSƒ“ƒtƒ‰ƒC‹َژBƒeƒXƒg
++++++++++++++++++
ƒڈ‚èƒPƒ‰‚إ‚·پB
ƒLƒƒƒٹƒoپ[120‚ج•û‚ھˆê‰ٌ‚èڈ¬‚³‚¢‚إ‚·پB
 پ@پƒ
‹َژB‚ةٹض‚µ‚ؤچl‚¦‚é‚ئپA“dˆ³‚ج’ل‚³‚ھ–â‘è‚ئ‚ب‚è‚ـ‚·پB
3.3V‚جCMOS‚بCCD‚ب‚ç‰آ”\‚إ‚·پB
ƒRƒCƒ““d’r‚إ‚à‰آ”\‚©‚àپH
ژں‚حڈd‚³‚إ‚·پB
ڈd‚³‚حپA57.0g‚ئ28.7g
پ@پƒ
‹َژB‚ةٹض‚µ‚ؤچl‚¦‚é‚ئپA“dˆ³‚ج’ل‚³‚ھ–â‘è‚ئ‚ب‚è‚ـ‚·پB
3.3V‚جCMOS‚بCCD‚ب‚ç‰آ”\‚إ‚·پB
ƒRƒCƒ““d’r‚إ‚à‰آ”\‚©‚àپH
ژں‚حڈd‚³‚إ‚·پB
ڈd‚³‚حپA57.0g‚ئ28.7g
 پ@پƒ57.0g‚ئ28.7g
‚±‚جڈd‚³‚حپA•Wڈ€ƒTپ[ƒ{‚âƒWƒƒƒCƒچ‚و‚è‚àڈd‚¢‚±‚ئ‚ًچl—¶‚·‚é‚ئپA
ƒMƒ`ƒMƒ`‚ة‹l‚كچ‚ٌ‚¾‚و‚¤‚بƒCƒپپ[ƒW‚إ‚·پB
ƒڈƒٹƒPƒ‰‚جڈd‚³‚حƒoƒbƒeƒٹپ[‚ج”ن—¦‚ھچ‚‚¢‚إ‚·پB
‚ـ‚½پA‘S‚ƒRƒ“ƒ|پ[ƒlƒ“ƒg‚³‚ê‚ؤ‚¢‚éƒLƒƒƒٹƒoپ[120‚ة‘خ‚µ‚ؤپA
ژَگM‹@پAAMPپAƒTپ[ƒ{‚ھژہ‘ج‚جƒ†ƒjƒbƒg‚ً‚ب‚µ‚ؤƒ}ƒEƒ“ƒg‚³‚ê‚ؤ‚¢‚é
‚ئ‚¢‚¤–‚ة‚±‹أ‚ء‚½چى‚è‚إپA‚±‚ê‚ھڈd‚³‚جŒ´ˆِ‚ة‚à‚ب‚ء‚ؤ‚ـ‚·پB
Œy—ت‰»‚ج—]’n‚àڈ\•ھ‚ ‚è‚ـ‚·پB
‚إ‚àپA‚±‚ج‚ـ‚ـ‚إ‚àTVTX‚ًژ‚؟ڈم‚°‚邱‚ئ‚حڈ\•ھ‚ة‰آ”\‚¾‚ئژv‚¢‚ـ‚·پB
ƒsƒbƒ`‚جƒRƒ“ƒgƒچپ[ƒ‹‚ھ‚إ‚«‚éCCPM‚ب3DƒAƒNƒچ‰آ”\‚بƒ‚ƒfƒ‹‚ھ‚ ‚è‚ـ‚·‚ج‚إپA
ڈمڈ¸”\—ح‚à‚³‚ç‚ةƒCƒP‚»‚¤‚إ‚·پB
ƒڈƒٹƒPƒ‰‰ü‘¢‹Lژ–
---------->
پ@پƒ57.0g‚ئ28.7g
‚±‚جڈd‚³‚حپA•Wڈ€ƒTپ[ƒ{‚âƒWƒƒƒCƒچ‚و‚è‚àڈd‚¢‚±‚ئ‚ًچl—¶‚·‚é‚ئپA
ƒMƒ`ƒMƒ`‚ة‹l‚كچ‚ٌ‚¾‚و‚¤‚بƒCƒپپ[ƒW‚إ‚·پB
ƒڈƒٹƒPƒ‰‚جڈd‚³‚حƒoƒbƒeƒٹپ[‚ج”ن—¦‚ھچ‚‚¢‚إ‚·پB
‚ـ‚½پA‘S‚ƒRƒ“ƒ|پ[ƒlƒ“ƒg‚³‚ê‚ؤ‚¢‚éƒLƒƒƒٹƒoپ[120‚ة‘خ‚µ‚ؤپA
ژَگM‹@پAAMPپAƒTپ[ƒ{‚ھژہ‘ج‚جƒ†ƒjƒbƒg‚ً‚ب‚µ‚ؤƒ}ƒEƒ“ƒg‚³‚ê‚ؤ‚¢‚é
‚ئ‚¢‚¤–‚ة‚±‹أ‚ء‚½چى‚è‚إپA‚±‚ê‚ھڈd‚³‚جŒ´ˆِ‚ة‚à‚ب‚ء‚ؤ‚ـ‚·پB
Œy—ت‰»‚ج—]’n‚àڈ\•ھ‚ ‚è‚ـ‚·پB
‚إ‚àپA‚±‚ج‚ـ‚ـ‚إ‚àTVTX‚ًژ‚؟ڈم‚°‚邱‚ئ‚حڈ\•ھ‚ة‰آ”\‚¾‚ئژv‚¢‚ـ‚·پB
ƒsƒbƒ`‚جƒRƒ“ƒgƒچپ[ƒ‹‚ھ‚إ‚«‚éCCPM‚ب3DƒAƒNƒچ‰آ”\‚بƒ‚ƒfƒ‹‚ھ‚ ‚è‚ـ‚·‚ج‚إپA
ڈمڈ¸”\—ح‚à‚³‚ç‚ةƒCƒP‚»‚¤‚إ‚·پB
ƒڈƒٹƒPƒ‰‰ü‘¢‹Lژ–
---------->
 پ@پƒ
ژهٹد‚ةٹµ‚ê‚邽‚ك‚ةپB
پ@پƒ
ژهٹد‚ةٹµ‚ê‚邽‚ك‚ةپB
 پ@پƒ
پ@پƒ
 پ@پƒ
20”N‚ظ‚ا‘O‚ةپAƒ‰ƒWƒRƒ“‚جNiCd‚©‚çƒjƒNƒچƒ€گü‚ً”M‚µ‚ؤƒ{ƒ^ƒ“‚إ’S‚¢‚¾‰–ƒr‚âƒXƒeƒ“ƒŒƒXٹا‚©‚ç‘إ‚؟ڈم‚°‚ؤ‚ـ‚µ‚½پB
‚»‚ꂾ‚¯‚إ‚ح–³”\‚ب‚ج‚إپA
ˆê‚©‚çƒCƒچƒCƒچ‚ئ‘n‚ء‚ؤ‚ف‚é‚ئ‚¨‚à‚µ‚ë‚¢‚ئژv‚¢‚ـ‚·پB
‰ء‘¬’iٹK‚جUP‚ج‚½‚ك‚ج”Rڈؤ–تگد‚âƒmƒYƒ‹‚جگفŒvپA•ûŒüگ§ŒنپB
پ@پƒ
20”N‚ظ‚ا‘O‚ةپAƒ‰ƒWƒRƒ“‚جNiCd‚©‚çƒjƒNƒچƒ€گü‚ً”M‚µ‚ؤƒ{ƒ^ƒ“‚إ’S‚¢‚¾‰–ƒr‚âƒXƒeƒ“ƒŒƒXٹا‚©‚ç‘إ‚؟ڈم‚°‚ؤ‚ـ‚µ‚½پB
‚»‚ꂾ‚¯‚إ‚ح–³”\‚ب‚ج‚إپA
ˆê‚©‚çƒCƒچƒCƒچ‚ئ‘n‚ء‚ؤ‚ف‚é‚ئ‚¨‚à‚µ‚ë‚¢‚ئژv‚¢‚ـ‚·پB
‰ء‘¬’iٹK‚جUP‚ج‚½‚ك‚ج”Rڈؤ–تگد‚âƒmƒYƒ‹‚جگفŒvپA•ûŒüگ§ŒنپB
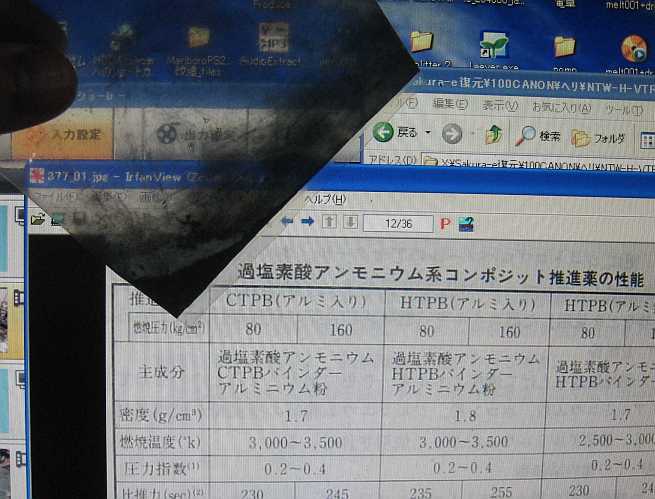 پ@پƒ
ƒXƒ^پ[ƒ^پ[‚ةƒ}ƒOƒlƒVƒEƒ€‚ًژg‚ء‚ؤ‚ف‚é‚ئ—ا‚¢‚©‚àپH
پ@پƒ
ƒXƒ^پ[ƒ^پ[‚ةƒ}ƒOƒlƒVƒEƒ€‚ًژg‚ء‚ؤ‚ف‚é‚ئ—ا‚¢‚©‚àپH
 پ@پƒ
ˆê”ت“I‚ةˆµ‚¢‚â‚·‚¢‚ج‚حƒRƒR‚إپA‹à‘®‚ًچ¬‚؛‚é‚ئپB
پ@پƒ
ˆê”ت“I‚ةˆµ‚¢‚â‚·‚¢‚ج‚حƒRƒR‚إپA‹à‘®‚ًچ¬‚؛‚é‚ئپB
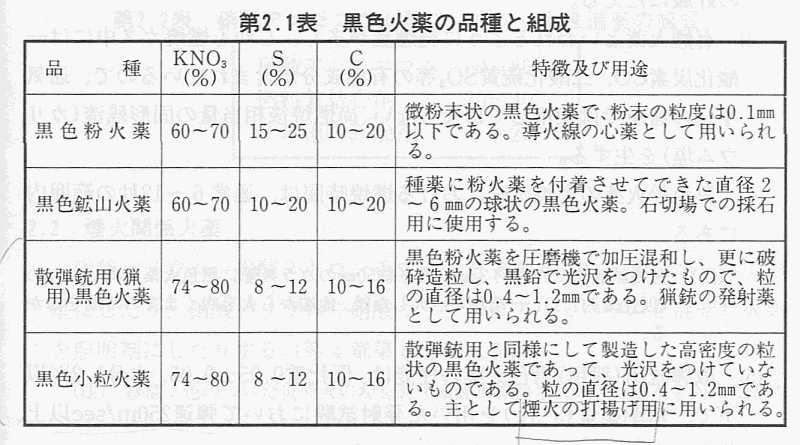 پ@پƒ
---------------
XRB‚إ‹َژB‚ج‰آ”\گ«
ƒyƒCƒچپ[ƒhUP
پ@پƒ
---------------
XRB‚إ‹َژB‚ج‰آ”\گ«
ƒyƒCƒچپ[ƒhUP
 پ@پƒ
پ@پƒ
 پ@پƒ
پ@پƒ
 پ@پƒ
ƒeپ[ƒ‹‚حƒJپ[ƒ{ƒ“گü‚إڈ\•ھ‚إ‚·پBپƒ-5g
پ@پƒ
ƒeپ[ƒ‹‚حƒJپ[ƒ{ƒ“گü‚إڈ\•ھ‚إ‚·پBپƒ-5g
 پ@پƒ‘چŒvپF-25g
“d’r‚إ‚جŒy—ت‰»پB
HP-LG325-0450-2SپF1280‰~پF450mAhپF29gپ@پƒ-10g
چX‚ةگ”ƒOƒ‰ƒ€Œ¸‚点‚éƒnƒYپB
ڈdگSچ‡‚ي‚¹‚ھ–â‘èپ¨“d’r‚â‚ب‚é‚ׂƒeپ[ƒ‹گو‚ةگف’u
ƒRƒAƒŒƒXƒ‚پ[ƒ^پ[‚ج—â‹pپB
ƒNپ[ƒ‹ƒXƒ^ƒbƒtپ{”r”Mƒ|پ[ƒg
پEگدچع•¨
ƒJƒپƒ‰+ƒgƒ‰ƒ“ƒXƒ~ƒbƒ^پپ13gپ@پ¨2g’ِ“x‚جŒy—ت‰»‚ح‰آ”\پB
ژَگM‹@پپ8g
ƒJƒپƒ‰‹ى“®ƒTپ[ƒ{Œn“پپ9+4g
BEC=2gپ@پ¨5VƒLƒbƒ`ƒٹ‚ة‚µ‚ؤƒJƒپƒ‰•”•ھ—p‚ئ“چ‡‚·‚ê‚خ–³‚‚ب‚éپB
ŒvپF36g
—Lگü”ٍچs‚àپB
”÷•—ژ‚ةٹO‚إ”ٍ‚خ‚µ‚½‚ç”ٍ‚خ‚¹‚ـ‚µ‚½پB
‚µ‚©‚µپA
ƒAƒ“ƒeƒi‚ًگL‚خ‚µ‚ؤ‚ب‚©‚ء‚½‚¹‚¢‚©پAƒmپ[ƒRƒ“‹C–،‚إ“î’…—¤‚µ‚ـ‚µ‚½پB
‚±‚ج‚ئ‚«پAگ…•½‚إ‚µ‚½‚ھڈم‚جƒuƒŒپ[ƒh‚ھˆê–‡”j‘¹‚µ‚ـ‚µ‚½پB
گـ‚ê‚â‚·‚¢ƒuƒŒپ[ƒh‚ج•t‚¯چھ‚ً‚ ‚ç‚©‚¶‚كƒZƒچƒeپ[ƒv‚إ•â‹‚µ‚ؤ‚¨‚‚ئ—ا‚¢‚و‚¤‚إ‚·پB
ƒhƒ‰ƒSƒ“ƒtƒ‰ƒC“I‚ب‹“x‚ج‚ ‚é‚ج‚à—~‚µ‚¢‚إ‚·‚ثپB
“d’r‚ئژَگM‹@‚إƒoƒ‰ƒ“ƒXپB
1.2G‚جƒgƒ‰ƒ“ƒXƒ~ƒbƒ^‚حپH
3.4g‚جƒTپ[ƒ{‚ئƒNƒٹƒXƒ^ƒ‹‚ج‚¢‚ç‚ب‚¢ژَگM‹@‚إ‚·پB
پ@پƒ‘چŒvپF-25g
“d’r‚إ‚جŒy—ت‰»پB
HP-LG325-0450-2SپF1280‰~پF450mAhپF29gپ@پƒ-10g
چX‚ةگ”ƒOƒ‰ƒ€Œ¸‚点‚éƒnƒYپB
ڈdگSچ‡‚ي‚¹‚ھ–â‘èپ¨“d’r‚â‚ب‚é‚ׂƒeپ[ƒ‹گو‚ةگف’u
ƒRƒAƒŒƒXƒ‚پ[ƒ^پ[‚ج—â‹pپB
ƒNپ[ƒ‹ƒXƒ^ƒbƒtپ{”r”Mƒ|پ[ƒg
پEگدچع•¨
ƒJƒپƒ‰+ƒgƒ‰ƒ“ƒXƒ~ƒbƒ^پپ13gپ@پ¨2g’ِ“x‚جŒy—ت‰»‚ح‰آ”\پB
ژَگM‹@پپ8g
ƒJƒپƒ‰‹ى“®ƒTپ[ƒ{Œn“پپ9+4g
BEC=2gپ@پ¨5VƒLƒbƒ`ƒٹ‚ة‚µ‚ؤƒJƒپƒ‰•”•ھ—p‚ئ“چ‡‚·‚ê‚خ–³‚‚ب‚éپB
ŒvپF36g
—Lگü”ٍچs‚àپB
”÷•—ژ‚ةٹO‚إ”ٍ‚خ‚µ‚½‚ç”ٍ‚خ‚¹‚ـ‚µ‚½پB
‚µ‚©‚µپA
ƒAƒ“ƒeƒi‚ًگL‚خ‚µ‚ؤ‚ب‚©‚ء‚½‚¹‚¢‚©پAƒmپ[ƒRƒ“‹C–،‚إ“î’…—¤‚µ‚ـ‚µ‚½پB
‚±‚ج‚ئ‚«پAگ…•½‚إ‚µ‚½‚ھڈم‚جƒuƒŒپ[ƒh‚ھˆê–‡”j‘¹‚µ‚ـ‚µ‚½پB
گـ‚ê‚â‚·‚¢ƒuƒŒپ[ƒh‚ج•t‚¯چھ‚ً‚ ‚ç‚©‚¶‚كƒZƒچƒeپ[ƒv‚إ•â‹‚µ‚ؤ‚¨‚‚ئ—ا‚¢‚و‚¤‚إ‚·پB
ƒhƒ‰ƒSƒ“ƒtƒ‰ƒC“I‚ب‹“x‚ج‚ ‚é‚ج‚à—~‚µ‚¢‚إ‚·‚ثپB
“d’r‚ئژَگM‹@‚إƒoƒ‰ƒ“ƒXپB
1.2G‚جƒgƒ‰ƒ“ƒXƒ~ƒbƒ^‚حپH
3.4g‚جƒTپ[ƒ{‚ئƒNƒٹƒXƒ^ƒ‹‚ج‚¢‚ç‚ب‚¢ژَگM‹@‚إ‚·پB
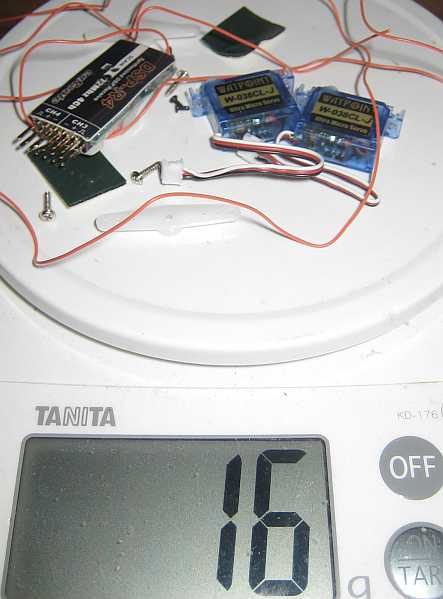 پ@پƒ16g
ƒJƒپƒ‰پ{ƒgƒ‰ƒ“ƒXƒ~ƒbƒ^پ{‚TVƒŒƒMƒ…ƒŒƒ^پB
ƒTپ[ƒ{‚ح‚±‚ج‚و‚¤‚ة‚µ‚ؤƒJƒپƒ‰‚حڈم•ûŒü‚ة“‹چع‚·‚é—\’è‚إ‚·پB
پ@پƒ16g
ƒJƒپƒ‰پ{ƒgƒ‰ƒ“ƒXƒ~ƒbƒ^پ{‚TVƒŒƒMƒ…ƒŒƒ^پB
ƒTپ[ƒ{‚ح‚±‚ج‚و‚¤‚ة‚µ‚ؤƒJƒپƒ‰‚حڈم•ûŒü‚ة“‹چع‚·‚é—\’è‚إ‚·پB
 پ@پƒ
•t‚¯‚½ٹ´‚¶‚إ‚·پB
پ@پƒ
•t‚¯‚½ٹ´‚¶‚إ‚·پB
 پ@پƒ188g+Tx+ƒŒƒMƒ…ƒŒƒ^
پ@پƒ188g+Tx+ƒŒƒMƒ…ƒŒƒ^
.jpg) پ@پƒ“®‰و پ@
‚±‚جڈَ‘ش‚إ—]—T‚ًژ‚ء‚ؤ”ٍ‚ׂـ‚µ‚½پB
پ@پƒ“®‰و پ@
‚±‚جڈَ‘ش‚إ—]—T‚ًژ‚ء‚ؤ”ٍ‚ׂـ‚µ‚½پB
 پ@پƒ”ٍچsژ‚جƒoƒ‰ƒ“ƒXپB
پ@پƒ”ٍچsژ‚جƒoƒ‰ƒ“ƒXپB
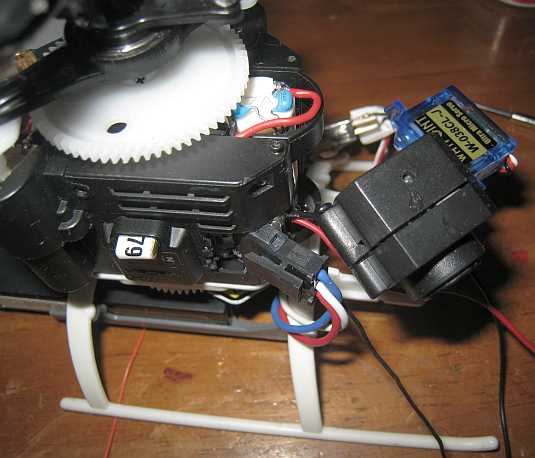 پ@پƒƒRƒlƒNƒ^‚ً‚¸‚炵پB
پ@پƒƒRƒlƒNƒ^‚ً‚¸‚炵پB
 پ@پƒ‘—گM‹@‚جژو‚è•t‚¯پB
پ@پƒ‘—گM‹@‚جژو‚è•t‚¯پB
 پ@پƒ161g+ƒŒƒMƒ…ƒŒƒ^پB
‚؟‚ه‚ء‚ئڈd‚‚ب‚è‚ـ‚·‚ھپAƒXƒCƒbƒ`ƒ“ƒO“dŒ¹‚ًڈو‚¹‚ؤ‚ف‚ـ‚µ‚½پB
پ@پƒ161g+ƒŒƒMƒ…ƒŒƒ^پB
‚؟‚ه‚ء‚ئڈd‚‚ب‚è‚ـ‚·‚ھپAƒXƒCƒbƒ`ƒ“ƒO“dŒ¹‚ًڈو‚¹‚ؤ‚ف‚ـ‚µ‚½پB
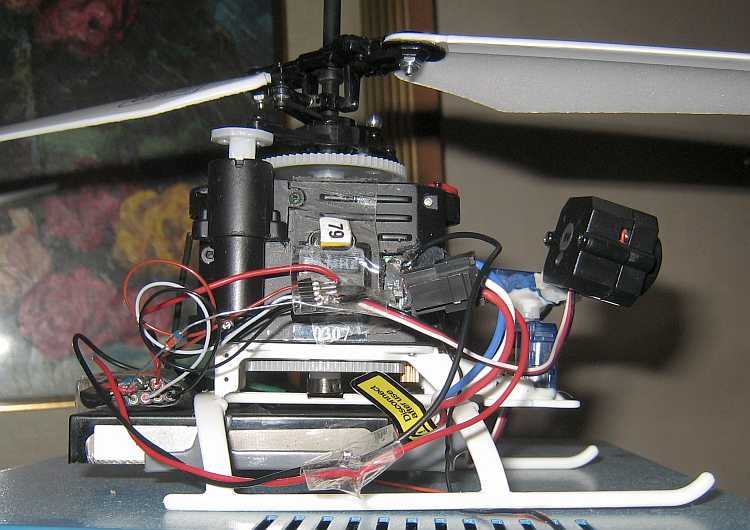 پ@پƒپB
پ@پƒپB
 پ@پƒپB
پ@پƒپB
 پ@پƒ200gپB
پ@پƒ200gپB
.jpg) پ@پƒ“®‰و پ@
پ@پƒ“®‰و پ@
.jpg) پ@پƒ“®‰و پ@
پ@پ«‚ـ‚ئ‚كپB
پ@پƒ“®‰و پ@
پ@پ«‚ـ‚ئ‚كپB
 پ@پƒ500Lama‚ض‚ج“‹چع‚ًپcپB
ƒJƒپƒ‰ƒ}ƒEƒ“ƒg‚ج‹¤–آگU“®گ”‚حƒچپ[ƒ^پ[‰ٌ“]گ”‚و‚è’ل‚پBپƒژہ‹@‚جƒeپ[ƒ‹ƒuپ[ƒ€‚ئ“¯‚¶‚و‚¤‚ةپB
---------------
پ@پƒ500Lama‚ض‚ج“‹چع‚ًپcپB
ƒJƒپƒ‰ƒ}ƒEƒ“ƒg‚ج‹¤–آگU“®گ”‚حƒچپ[ƒ^پ[‰ٌ“]گ”‚و‚è’ل‚پBپƒژہ‹@‚جƒeپ[ƒ‹ƒuپ[ƒ€‚ئ“¯‚¶‚و‚¤‚ةپB
---------------
گدچع•¨‚جƒŒƒCƒAƒEƒgپB
ƒŒƒMƒ…ƒŒƒ^‰ٌکHپB
ƒJƒپƒ‰‚جƒŒƒ“ƒY•دچXپB
LDٹضکAپB
•ْ“dٹي
پuCellMeter-8پv
پu335mmƒپƒCƒ“ƒچپ[ƒ^پ[پv
AMP‚ج”j‘¹پB
“d—¬ƒIپ[ƒoپ[ƒ‰ƒ“ƒvپBپƒƒŒƒxƒ‹ƒپپ[ƒ^پ[
ƒ‰ƒWƒPپ[ƒ^پ[
ƒ‚ƒjƒ^‚ةƒvƒچƒWƒFƒNƒ^پ[‚إ—جˆو‚ًژ¦‚·پ¨ƒŒƒ“ƒY‚إ‚ا‚±‚ج—جˆو‚ًŒ©‚ؤ‚é‚©پB
ƒvƒچƒWƒFƒNƒ^‚âLD‚إˆت‘ٹ‚ًگU‚é‚ج‚àپB
ƒzƒoپ[ƒ‚پ[ƒh
ƒIپ[ƒgƒKƒjƒ“ƒO
LDƒKƒCƒh‚ة‚و‚é•â‘«
XIM2
پ„--rc01.html--
پ„--rc02.html--
پ„--rc03.html--
پ„--rc04.html--
پ„--rc05.html--
پ„--rc06.html--
پ„--rc07.html--
پ„--rc08.html--
پ„--rc09.html--پ™
پ„--rc10.html--
پ„--rc11.html--
پ„--rc12.html--
پ„--rc13.html--
پ„--rc14.html--
پ„--rc15.html--
پ„FPV‚بVRپHپ„
+[rcttr.html]+
+[rcttr2.html]+
+[rcttr3.html]+
+[rcttr4.html]+
+[rcttr5.html]+
+[rcttr6.html]+
+[rcttr6.html]+
پ„--heli-r001.html-- پƒک_
پ„+[پƒک_]+
پ„--t-rex.html--
پƒ‚؟‚ه‚ء‚ئ•ھٹ„
پ„+[TVTX]+
‚ـ‚ئ‚ـ‚èژں‘و•ھٹ„ˆعچs—\’èپB
----–ك‚é----
‰¹ٹy