t-rex.htmlっ
~HMD(ヘッドトレース6)~
 tit
tit
>--rc01.html--
>--rc02.html--
>--rc03.html--
>--rc04.html--
>--rc05.html--
>--rc06.html--
>--rc07.html--
>--rc08.html--
>--rc09.html--
>--rc10.html--
>--rc11.html--
>--rc12.html--
>--rc13.html--
>--rc14.html--
>--rc15.html--
>FPVなVR?>
+[rcttr.html]+
+[rcttr2.html]+
+[rcttr3.html]+
+[rcttr4.html]+
+[rcttr5.html]+
+[rcttr6.html]+
+[t-rex.html]+
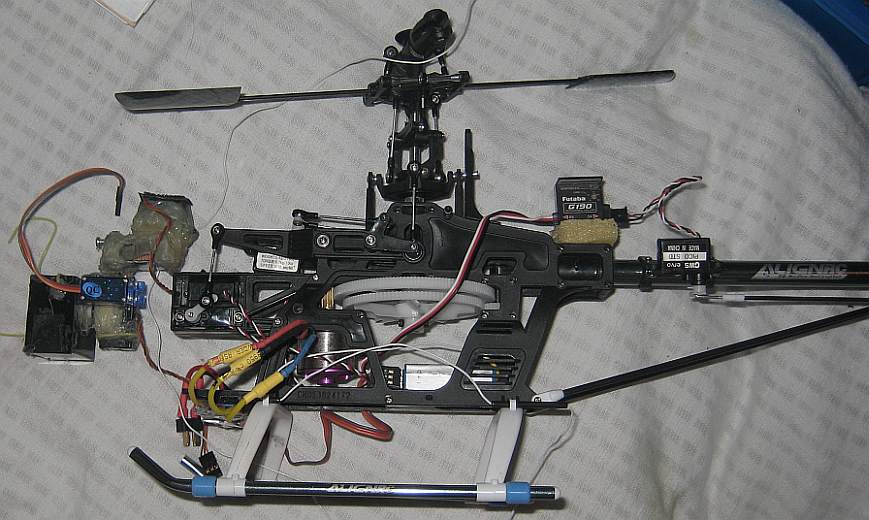
有線飛行にて簡易的チェック

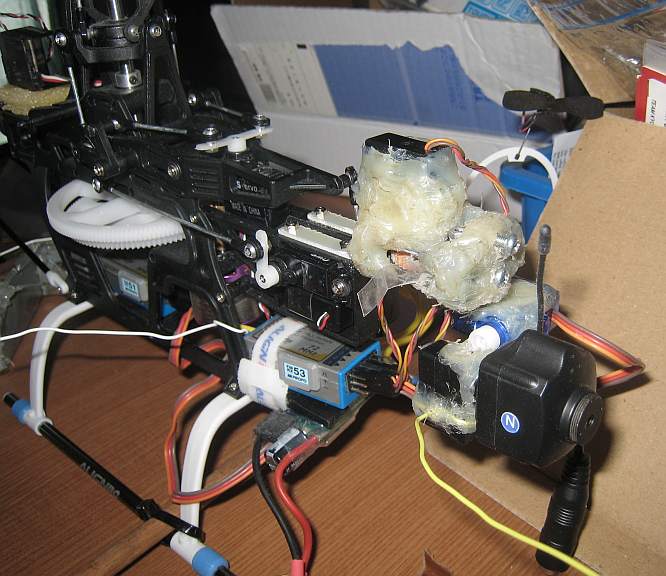
 ガラエポでくっつけました。
ガラエポでくっつけました。

 ーーーーーーーーーーーーーーーーーーーーーーーーーー
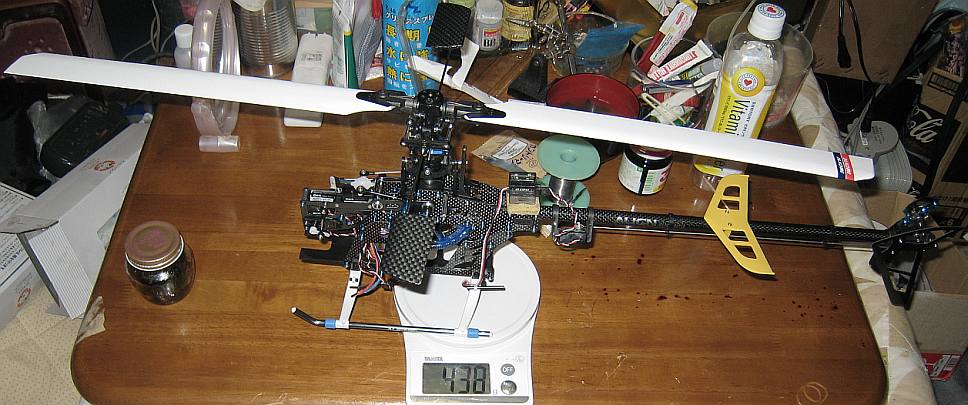
・有線での全備重量は以外に軽くて570gです。
これなら、小さめのリポBATTでは750g程度に押さえられます。
ーーーーーーーーーーーーーーーーーーーーーーーーーー
・有線での全備重量は以外に軽くて570gです。
これなら、小さめのリポBATTでは750g程度に押さえられます。

090201
・MiniStudioという日本のメーカーのモノです。<1500円
10gという軽くて大きなトルクが特徴です。
 GWSはQC(品管を通ったという意味)とシールに書いてあっても不良品の率が結構高いです。
加えてサーボホーンの強度が弱くてすぐたわみます。
ギヤも弱いですので、破損しやすいです。
GWSはQC(品管を通ったという意味)とシールに書いてあっても不良品の率が結構高いです。
加えてサーボホーンの強度が弱くてすぐたわみます。
ギヤも弱いですので、破損しやすいです。
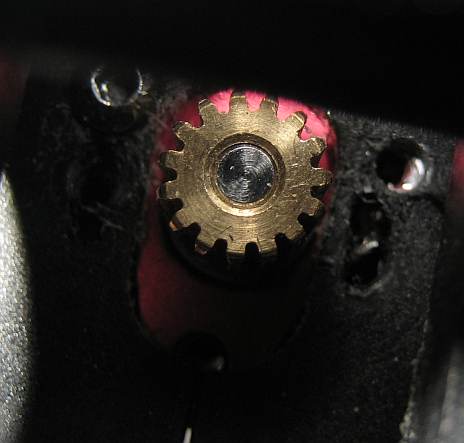
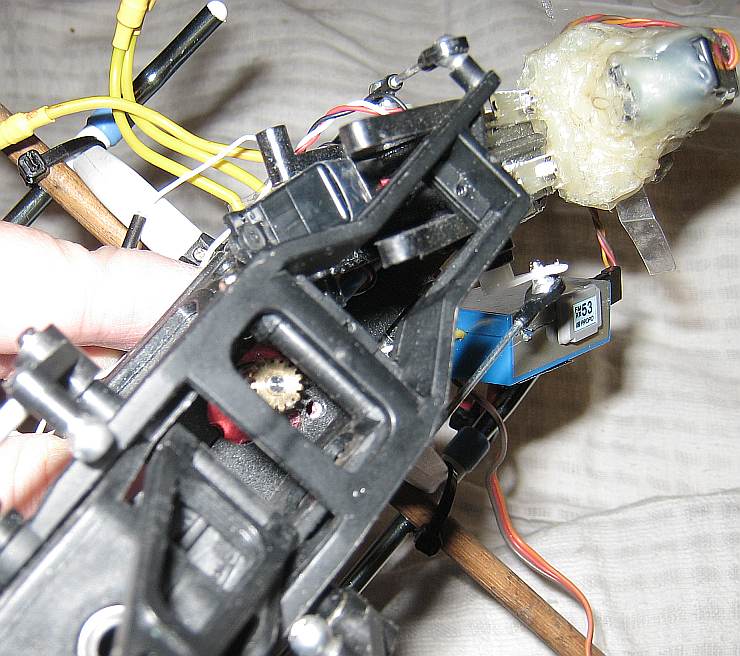
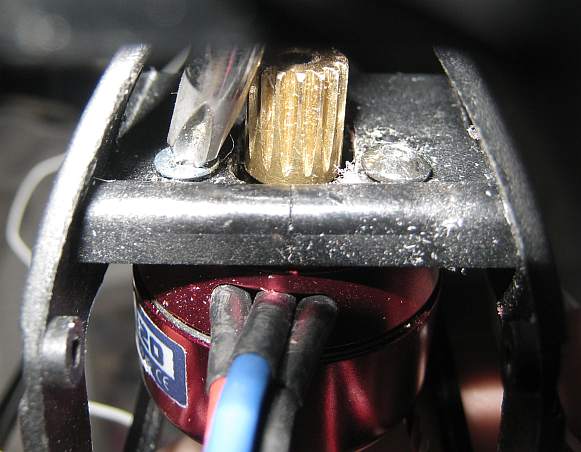
 黄色の部分が根本がくびれて弱いので削れていました。ココだけアルミ合金の歯を填めてて欲しいです。
補修用のギヤはメーカーから出てますので100円ちょっとで購入できるです。
おそらく衝突などで壊れるので幾つか買っておくとよいですね。
黄色の部分が根本がくびれて弱いので削れていました。ココだけアルミ合金の歯を填めてて欲しいです。
補修用のギヤはメーカーから出てますので100円ちょっとで購入できるです。
おそらく衝突などで壊れるので幾つか買っておくとよいですね。
 左側が角度センサーです。
このサーボモータでスライド抵抗とウォムギヤやラックアンドピニオンとかで直線位置制御の何かに流用できるかと思います。
左側が角度センサーです。
このサーボモータでスライド抵抗とウォムギヤやラックアンドピニオンとかで直線位置制御の何かに流用できるかと思います。

070203
 ・急がずちょっとずつ調整をしていこうと思い、
T-Rexの微調整は先にプロポをの方を行って機体を浮かせながら徐々に浮かせる予定でしたが、
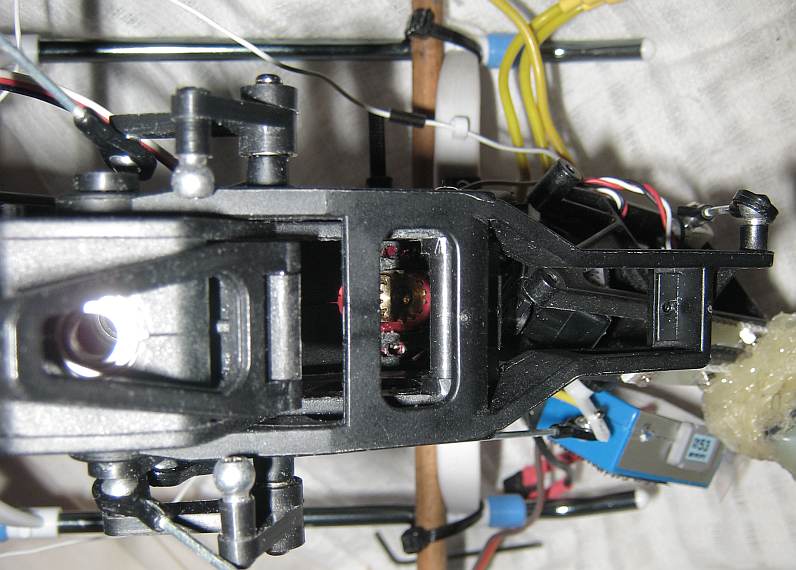
いきなりモーターのギヤの部分が飛びまして、
メインのギヤも削れてました。
よく見ると、メインローターにアンテナ線を巻き込んでいました。
コレには結構気を遣っていたのですが、テープで貼っておくべきでした。
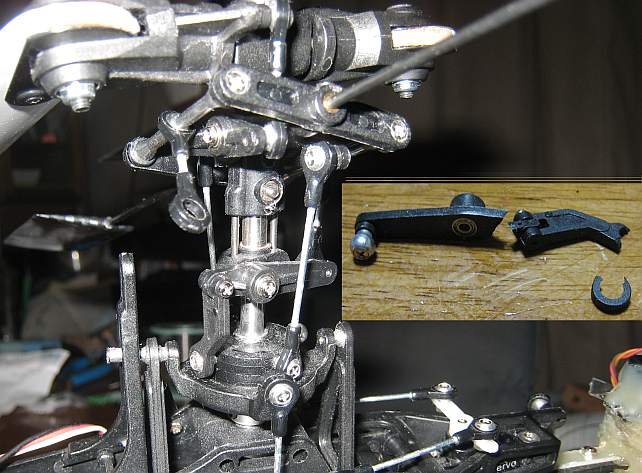
加えてミキシングアームが折れてました。
部品は結構高いようです。
ベアリングとボールリンケージは再利用出来るので要らないです。
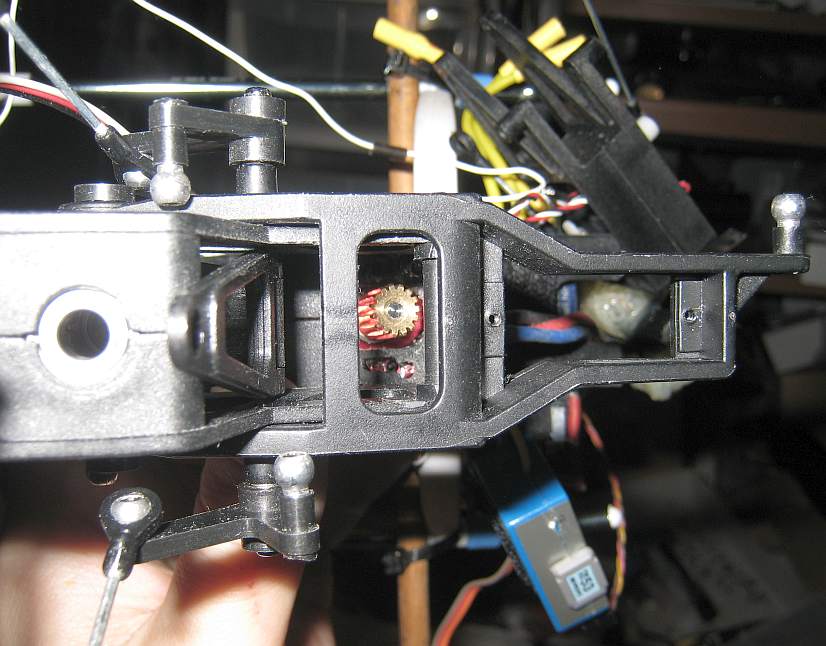
スロットルから重いギヤだと、ムダに電流値が高くなるだけですので、
修理ついでにモーターのギヤを10Tから9Tにしてギヤで高回転で無理なくとばせるように設定です。<但し、ピニオンは小さいほど歯の負担が大きいし構造も弱くなるです。
電源電圧を下げて、付属の長めのグラスローターを使うのも良いかも。
1820kv(2980円くらい)のモーターに15Tのギヤが穏やかで良いとも思いました。
場合によっては16~18Tの0.5モジュールギヤにしても良いかも、
まあ、ちびちびとやって、
典型的な小さなトラブルは早めに見つけたり味わって行くのも良いと思いました。
注文:アルミ製ミキシングアームとメインギヤ。
ついでに、デジタルサーボ。
カメラ駆動部分に0.3モジュールのギヤを検討のため真鍮製のギヤ。
・kv値とモーターの構造について。
回転方向にたいするステップの密度
・急がずちょっとずつ調整をしていこうと思い、
T-Rexの微調整は先にプロポをの方を行って機体を浮かせながら徐々に浮かせる予定でしたが、
いきなりモーターのギヤの部分が飛びまして、
メインのギヤも削れてました。
よく見ると、メインローターにアンテナ線を巻き込んでいました。
コレには結構気を遣っていたのですが、テープで貼っておくべきでした。
加えてミキシングアームが折れてました。
部品は結構高いようです。
ベアリングとボールリンケージは再利用出来るので要らないです。
スロットルから重いギヤだと、ムダに電流値が高くなるだけですので、
修理ついでにモーターのギヤを10Tから9Tにしてギヤで高回転で無理なくとばせるように設定です。<但し、ピニオンは小さいほど歯の負担が大きいし構造も弱くなるです。
電源電圧を下げて、付属の長めのグラスローターを使うのも良いかも。
1820kv(2980円くらい)のモーターに15Tのギヤが穏やかで良いとも思いました。
場合によっては16~18Tの0.5モジュールギヤにしても良いかも、
まあ、ちびちびとやって、
典型的な小さなトラブルは早めに見つけたり味わって行くのも良いと思いました。
注文:アルミ製ミキシングアームとメインギヤ。
ついでに、デジタルサーボ。
カメラ駆動部分に0.3モジュールのギヤを検討のため真鍮製のギヤ。
・kv値とモーターの構造について。
回転方向にたいするステップの密度

090205
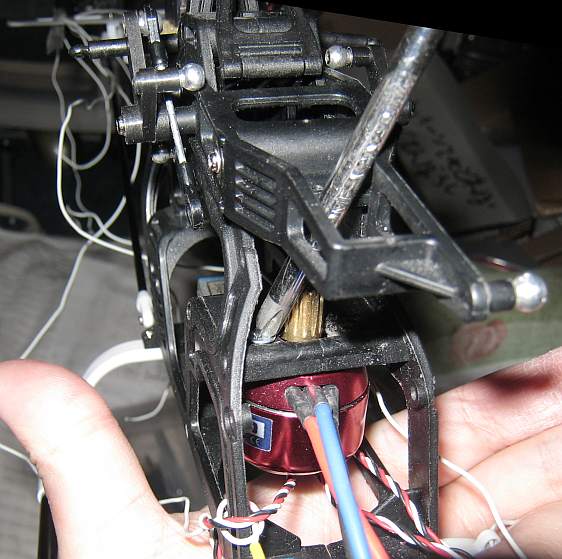
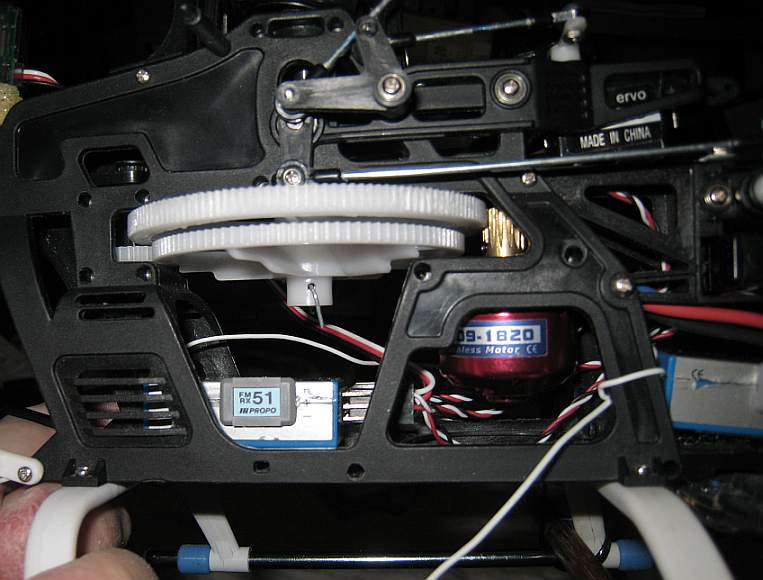
・T-Rexのモーターの交換。
とってもはめにくくて、やっとつきました。
とりあえず、上からみ見て穴をあわせました。
 前のサーボが付いてる部分がじゃまなのでそれを取り外しました。
前のサーボが付いてる部分がじゃまなのでそれを取り外しました。
 メインマストも外しました。<一応メインドライブギヤの交換もありますので、
メインマストも外しました。<一応メインドライブギヤの交換もありますので、
 ネジを填めてからモーターをスライドできるように穴をつなげました。
ネジを填めてからモーターをスライドできるように穴をつなげました。
 ヘキサゴンレンチじゃ回しやすくても押しにくいので、
プラスドライバーに変更です。
ヘキサゴンレンチじゃ回しやすくても押しにくいので、
プラスドライバーに変更です。

 とりあえず、ココまでですy
とりあえず、ココまでですy
 ここまで行くのに大変苦労しました。
090630
二回目の取り付け。
下のような展開方法が良かったです。
ここまで行くのに大変苦労しました。
090630
二回目の取り付け。
下のような展開方法が良かったです。
 組み立て時にはめ込みやすいように面取りしておくと良いです。
組み立て時にはめ込みやすいように面取りしておくと良いです。
 090209
090209

 カーボンFRPの比重も見てみたいです。
カーボンFRPの比重も見てみたいです。
 100×330×1.5で73グラム。
比重は1.44
黄銅:8.42
鉄及び鉄合金:
極軟鋼 7.856~7.861
硬鋼 7.836~7.8460
高炭素鋼 7.810~7.833
ステンレス鋼 7.82
アルミニウム 2.72
ジュラルミン 2.79
超ジュラルミン 2.80
チタニウム合金 4.5
純チタン 4.6
ジュラコン樹脂 1.41
セラミック 2.5~3
ガラス 2.56
カーボン 1.60
ガラエポ 1.5~1.7
ポリカーボネート1.2
ポリプロピレン 0.91
ABS樹脂 1.15
ポリエチレン 0.91
ポリエステル樹脂
MCナイロン 1.15
ポリウレタン樹脂
超々ジュラルミン:引張強度、耐力超ジュラルミンよりも強力。ただしクラックが入りやすく、加工性が悪い&繰り返し荷重に弱い。
マグネシウム合金:機械的な強度を高めた合金。の比重は1.8。実用金属中で最軽量。耐熱性、耐摩耗性が悪く、負担の大きい個所にはより強度の大きいアルミ鍛造品を使用して補う。
090210
ピッチとスロットルの関係は、
ピッチゲージで決めて、モーターもテキトーに決めた上で、
ローター回転数を先に決め
それ以外にテールのセンター位置に無理が出ないようにするのがアル程度の判断判断材料ですね。。
100×330×1.5で73グラム。
比重は1.44
黄銅:8.42
鉄及び鉄合金:
極軟鋼 7.856~7.861
硬鋼 7.836~7.8460
高炭素鋼 7.810~7.833
ステンレス鋼 7.82
アルミニウム 2.72
ジュラルミン 2.79
超ジュラルミン 2.80
チタニウム合金 4.5
純チタン 4.6
ジュラコン樹脂 1.41
セラミック 2.5~3
ガラス 2.56
カーボン 1.60
ガラエポ 1.5~1.7
ポリカーボネート1.2
ポリプロピレン 0.91
ABS樹脂 1.15
ポリエチレン 0.91
ポリエステル樹脂
MCナイロン 1.15
ポリウレタン樹脂
超々ジュラルミン:引張強度、耐力超ジュラルミンよりも強力。ただしクラックが入りやすく、加工性が悪い&繰り返し荷重に弱い。
マグネシウム合金:機械的な強度を高めた合金。の比重は1.8。実用金属中で最軽量。耐熱性、耐摩耗性が悪く、負担の大きい個所にはより強度の大きいアルミ鍛造品を使用して補う。
090210
ピッチとスロットルの関係は、
ピッチゲージで決めて、モーターもテキトーに決めた上で、
ローター回転数を先に決め
それ以外にテールのセンター位置に無理が出ないようにするのがアル程度の判断判断材料ですね。。
 モータの加熱は殆ど感じられませんでした。
で、
何度か浮上させながら調整して
おろしたとき、床にちょっとかすっただけで、テールブレードが折れました。
・対処としては尾翼にガードを付ける。
・カーボンブレードにする。
ということになるのですが、
カーボンにすると根本が壊れやすいですので、
ガードを付けた上で、
テールを金属部品に一番安いブレードを付けるとして注文しました。
この機体の樹脂は折れやすいようです。
NEXUSのブレード
ねちっこくって折れにくいのですが、
EPコンセプトの上のフレームは強靱ですし、
カウルは厚くても比重が小さいためかなり軽いです。
モータの加熱は殆ど感じられませんでした。
で、
何度か浮上させながら調整して
おろしたとき、床にちょっとかすっただけで、テールブレードが折れました。
・対処としては尾翼にガードを付ける。
・カーボンブレードにする。
ということになるのですが、
カーボンにすると根本が壊れやすいですので、
ガードを付けた上で、
テールを金属部品に一番安いブレードを付けるとして注文しました。
この機体の樹脂は折れやすいようです。
NEXUSのブレード
ねちっこくって折れにくいのですが、
EPコンセプトの上のフレームは強靱ですし、
カウルは厚くても比重が小さいためかなり軽いです。


 090221
カーボンフレームはかなりの部品がありますので、
ヘッドとテール部分をメタルパーツに交換するとしたら、
もう一機できそうです。
さすがに、
…もったいない気分です。
090223
スタビライザーウェイトとカーボンテールブレード
090221
カーボンフレームはかなりの部品がありますので、
ヘッドとテール部分をメタルパーツに交換するとしたら、
もう一機できそうです。
さすがに、
…もったいない気分です。
090223
スタビライザーウェイトとカーボンテールブレード
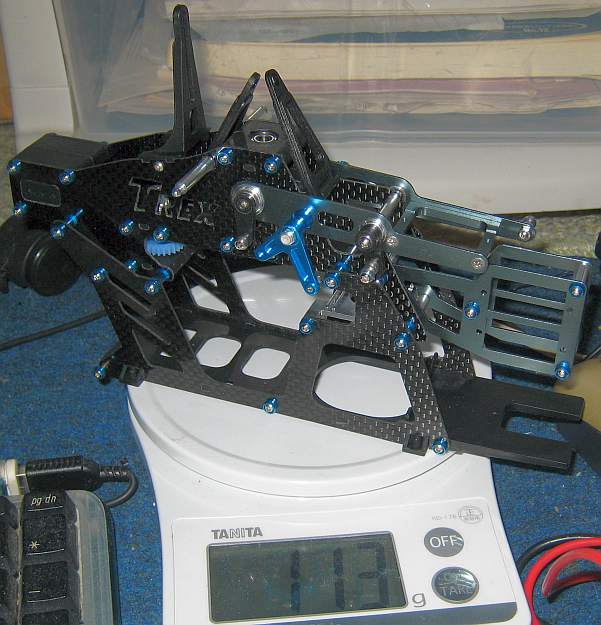
 カーボンフレームキット:11800円
カーボンフレームキット:11800円
 カーボンとメタルパーツを使う人は最初にコレがよいです。
プラの方がコストパフォーマンスが良い部分もあります。
フレームが板というのは魅力的です。
しかも、
T-Rexの構造は、一番シンプルなので、
ヘリ自体の設計に良い感じです。
これは、
113gって、
一応金属が多いのですが、軽いのでしょうかねー、
カーボンとメタルパーツを使う人は最初にコレがよいです。
プラの方がコストパフォーマンスが良い部分もあります。
フレームが板というのは魅力的です。
しかも、
T-Rexの構造は、一番シンプルなので、
ヘリ自体の設計に良い感じです。
これは、
113gって、
一応金属が多いのですが、軽いのでしょうかねー、
 下記を取り付けまして、
モーター+ドライブギヤ
ジャイロ(7g)
サーボ(5.4×4=21.6g)
ロッド系統
フライバーウェイト
テールブレード
テールリンケージ
で、140g増加して251gになりました。
下記を取り付けまして、
モーター+ドライブギヤ
ジャイロ(7g)
サーボ(5.4×4=21.6g)
ロッド系統
フライバーウェイト
テールブレード
テールリンケージ
で、140g増加して251gになりました。
 モーターが重そうです。
---------------------
他の積載は。
受信機+AMP=42g
スキッド
テールブーム+ガイド+メカ+ベルト+尾翼
ヘッド部分+ローター。
335mmロングローター
モーターが重そうです。
---------------------
他の積載は。
受信機+AMP=42g
スキッド
テールブーム+ガイド+メカ+ベルト+尾翼
ヘッド部分+ローター。
335mmロングローター
カメラ系統
カメラ+トランスミッタ:23g <レンズ改良?
0.3モジュール:10g程度。 <樹脂化すれば-8g
ベアリング:3.3g
サーボ:33.6g
筐体:カーボン板(40g)
シャフト類10g
3.4gサーボで軽量化。
215+28(AMP)+30(受×2)+23+10+3.3+33.6+40+10=402g
ヘッド+テール+スキッド+ロングローター+電池=500g
計:902g
---------------------
贅肉を落として、構造強度を最大限に考慮して、
ジュラコン樹脂、ガイダック、
チタン、超々ジュラルミン、カーボン、ケブラー
を使いまくったら、
ベアリングやメインマスト、
リンケージがボールじゃなくて良い部分とかありそうです。
セラミックベアリングとか、
樹脂のボールジョイントとか…、
ネジは…、
しかしながら、
質量は、寸法の3乗で変わりますので、
小さいモノは著しく影響しないです。
F1レースのような観点だとたしかにアルにはアルですね。
ボールリンケージなのですが、
自由度が高いという点は設計もラクで評価できるのですが、
動きが渋いと操作したときに弱い保持での遊びが余裕をもって吸収する部分があるはずなのに
復元力より摩擦が勝って打った舵が残ってしまう部分があるとも無いとも…、
ボールジョイントの取り付けネジを緩くして回るようにしとけば。 <一応ちっちゃくて軽い機体ですので。
オイレスメタルのように固く締められても素材自体の摩擦係数が低いように潤滑剤を練り込むとか。
GWSのサーボは、軸に直交する外力でちょっとブレて動くのですが、
これが、ピッチコントロール部分に及ぶガタとしてかなり見えてます。3°は動きそうです。
もちろん、一方向の力では見える問題がないのかもしれないのですが、
意図した調整には「いかほどのズレの修正?」という感じです。
で思いついたのが、
フレームの樹脂注型のときに
樹脂に短めのカーボンとかケブラー、
アラミド繊維とか混ぜたりして高圧力で流しこんで…、
安くて強くて軽くて…、
構造強度の高いモノコックっぽいフレームとか、
強いとは、剪断性とか、破壊角の大きくて粘り強い…、
軽くて強力なモーター、
沢山流せて軽めのバッテリー設定。
---------------------
0.5モジュールギヤで拡大する際に、角度センサーを外に付けるのもテ。
090226

 アメンボ
ロングローター+長いテールで速めのローター回転。
AMPとモーターの強化
軽ければ3軸ジャイロは200gですので付くかも?
有線なら、ピゴット、DB-Gun(300g)、レーザー誘導ロケット制御も
1500gを持ち上げられればOK?
アメンボ
ロングローター+長いテールで速めのローター回転。
AMPとモーターの強化
軽ければ3軸ジャイロは200gですので付くかも?
有線なら、ピゴット、DB-Gun(300g)、レーザー誘導ロケット制御も
1500gを持ち上げられればOK?
>--rc01.html--
>--rc02.html--
>--rc03.html--
>--rc04.html--
>--rc05.html--
>--rc06.html--
>--rc07.html--
>--rc08.html--
>--rc09.html--☆
>--rc10.html--
>--rc11.html--
>--rc12.html--
>--rc13.html--
>--rc14.html--
>--rc15.html--
>FPVなVR?>
+[rcttr.html]+
+[rcttr2.html]+
+[rcttr3.html]+
+[rcttr4.html]+
+[rcttr5.html]+
+[rcttr6.html]+
+[rcttr6.html]+
>--heli-r001.html-- <論
----戻る----
音楽