rcttr2.htmlっ
~HMD(ヘッドトレース2)~
 tit
tit
>--rc01.html--
>--rc02.html--
>--rc03.html--
>--rc04.html--
>--rc05.html--
>--rc06.html--
>--rc07.html--
>--rc08.html--
>--rc09.html--
>--rc10.html--
>--rc11.html--
>--rc12.html--
>--rc13.html--
>--rc14.html--
>--rc15.html--
>FPVなVR?>
+[rcttr.html]+
+[rcttr2.html]+
+[rcttr3.html]+
+[rcttr4.html]+
+[rcttr5.html]+
+[rcttr6.html]+
+[rcttr2.html]+
2008/07/06

若干重りの水が重いので頭を上げるときに抵抗感があります。
 重りの設定、バーの水平度(引っ張る方が強い)、潤滑にて微調整。
バー自体をスプリングリターンさせたり、
軽い素材にすればかなり良くなります。
動作の様子。クイックタイムでは再生に支障がアルこともあります。
-
重りの設定、バーの水平度(引っ張る方が強い)、潤滑にて微調整。
バー自体をスプリングリターンさせたり、
軽い素材にすればかなり良くなります。
動作の様子。クイックタイムでは再生に支障がアルこともあります。
- -
-
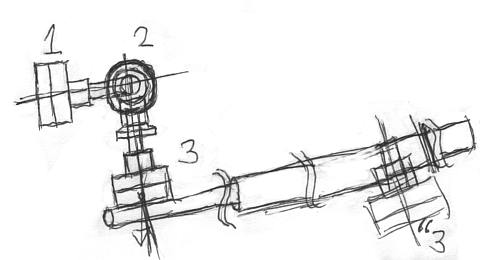
首の仰角はデュアルレートで補えるのですが、
水平方向(方位角)は大きい角度に回りますので、
どうにか考えてみました。
マイクロサーボ(5g程度)
で360°回るサーボ(標準タイプ)と、トルク大きめのミニサーボ(18g)
動作がちょっとぎこちないので、
[普通のサーボをギヤUP]することで可動範囲を広げると良いと思われます。<テンションかけてバックラッシュ0にする?

200円の12V700mAのスイッチング電源

首をかしげる方向にも駆動系を付けられるのですが、
VR以外の用途として、
どれほどの意味があるのか検討中です。
コントロール部分を全てアクティブ回路にして、
プロポだけでなくUSBのジョイスティック入力に高精度で入るようにもしたいです。
基本的に棒を無くしてジャイロを使いたいと思っております。
+[続き]+
 >--rc01.html--
>--rc02.html--
>--rc04.html--
>--rc10.html--
>--rc14.html--
>--rc15.html--
>--rc01.html--
>--rc02.html--
>--rc04.html--
>--rc10.html--
>--rc14.html--
>--rc15.html--
>+[rcttr.html]+
+[rcttr2.html]+
+[rcttr3.html]+
+[rcttr4.html]+
+[rcttr5.html]+
+[rcttr2.html]+
----戻る----

