rc-jisaku001.htmlっ
~ヘリコプター自作~
 tit
tit
>--rc01.html--
>--rc02.html--
>--rc03.html--
>--rc04.html--
>--rc05.html--
>--rc06.html--
>--rc07.html--
>--rc08.html--
>--rc09.html--
>--rc10.html--
>--rc11.html--
>--rc12.html--
>--rc13.html--
>--rc14.html--
>--rc15.html--
>FPVなVR?>
+[rcttr.html]+
+[rcttr2.html]+
+[rcttr3.html]+
+[rcttr4.html]+
+[rcttr5.html]+
+[rcttr6.html]+
+[rcttr6.html]+
---------------------
**********
++++++++++++++++++
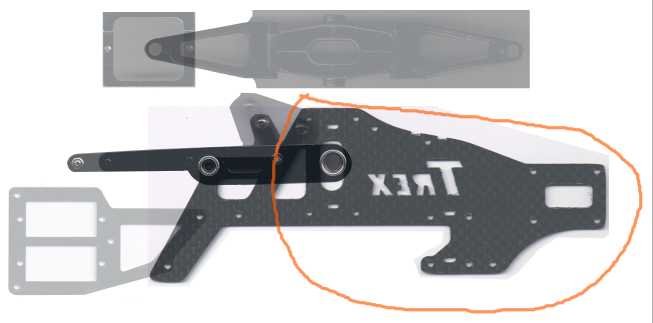
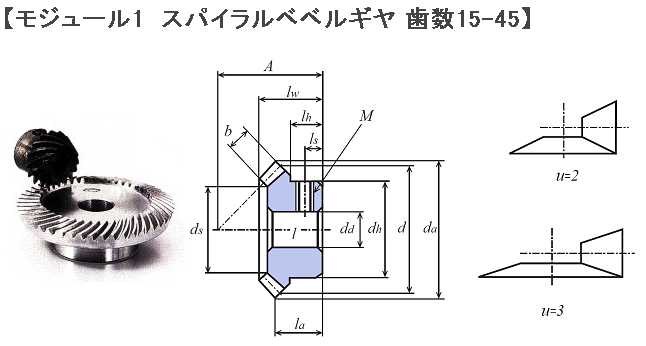
T-RexのHDEコントロール方式を使用して、
ベアリングなどはJRやヒロボーなどを流用の予定。
線でくくった部分の動力伝達系はエルゴ基準の予定。
 <
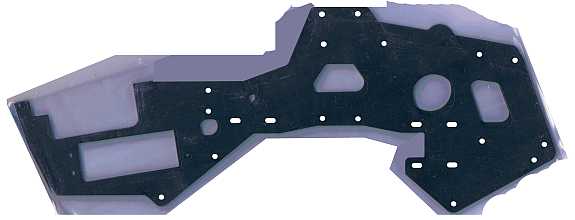
白い穴の位置関係は保存。
<
白い穴の位置関係は保存。
 <
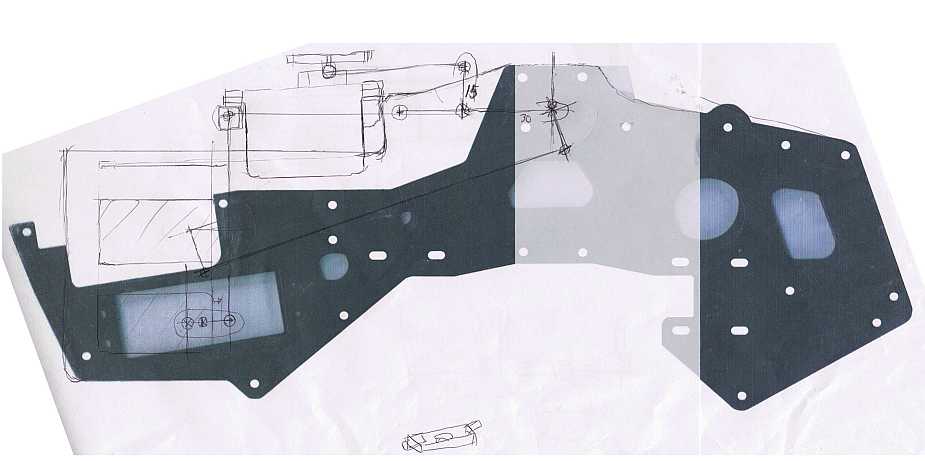
レイアウトの構想
<
レイアウトの構想
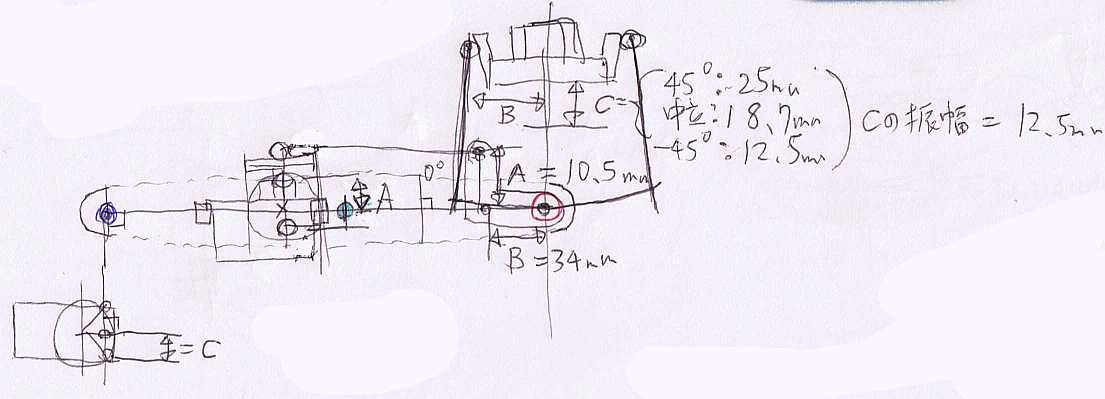 <
かなり具現化してきました。
<
かなり具現化してきました。
 <
こっちも気になってるデス。
同軸反転の安定↓
+[フリースピリット等]+
ベベルギヤが良いと思うのですが、金属だとかなり高価ですね。<重いのも
比率に規定があります。
<
こっちも気になってるデス。
同軸反転の安定↓
+[フリースピリット等]+
ベベルギヤが良いと思うのですが、金属だとかなり高価ですね。<重いのも
比率に規定があります。
 <
<
 <
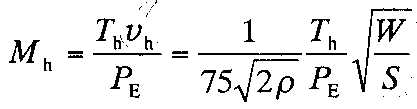
非常に工学的扱いにおける簡易的な指標の式があります。
回転翼の効率を示す
「ホバー効率」或いは「フィギュア・オブ・メリット」 <形状の効率
が次の式です。
<
非常に工学的扱いにおける簡易的な指標の式があります。
回転翼の効率を示す
「ホバー効率」或いは「フィギュア・オブ・メリット」 <形状の効率
が次の式です。
 <
<
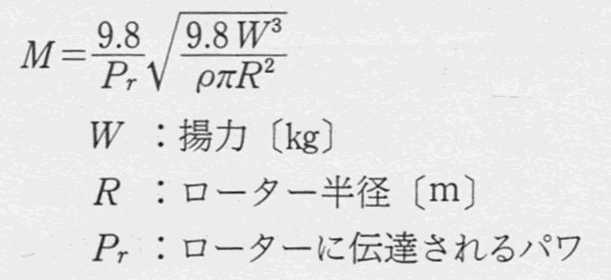 <
ρは空気の質量密度=1.23kg/m^3
Mは通常0.5~0.6と言われてます。
通常
「揚力=機体重量」を持ち上げる入力パワーの値の「効率=M」が優先されますね。
コレに付随するローター半径が順序のようです。
実際には諸事情によって、
持ち上げる質量は要求される最初の課題で、
入力パワーは原動機によって決まっている場合が多いかも知れません。
RCでは、
スケールが優先されるため、
「R」が決まり、それによって既製品になった「重量<P」であって。
3Dアクロでは、最大揚力Pを絞り出す方が優先されてそうです。
ともあれ、
機体のセッティングにおいて
半径とメリットとの関係は重要です。
レイノルズ数、ローター回転数も効率に関わって来ますね。
<
ρは空気の質量密度=1.23kg/m^3
Mは通常0.5~0.6と言われてます。
通常
「揚力=機体重量」を持ち上げる入力パワーの値の「効率=M」が優先されますね。
コレに付随するローター半径が順序のようです。
実際には諸事情によって、
持ち上げる質量は要求される最初の課題で、
入力パワーは原動機によって決まっている場合が多いかも知れません。
RCでは、
スケールが優先されるため、
「R」が決まり、それによって既製品になった「重量<P」であって。
3Dアクロでは、最大揚力Pを絞り出す方が優先されてそうです。
ともあれ、
機体のセッティングにおいて
半径とメリットとの関係は重要です。
レイノルズ数、ローター回転数も効率に関わって来ますね。
積載物のレイアウト。
レギュレタ回路。
カメラのレンズ変更。
LD関連。
放電器
「CellMeter-8」
「335mmメインローター」
AMPの破損。
電流オーバーランプ。<レベルメーター
ラジケーター
モニタにプロジェクターで領域を示す→レンズでどこの領域を見てるか。
プロジェクタやLDで位相を振るのも。
ホバーモード
オートガニング
LDガイドによる補足
XIM2
>--rc01.html--
>--rc02.html--
>--rc03.html--
>--rc04.html--
>--rc05.html--
>--rc06.html--
>--rc07.html--
>--rc08.html--
>--rc09.html--☆
>--rc10.html--
>--rc11.html--
>--rc12.html--
>--rc13.html--
>--rc14.html--
>--rc15.html--
>FPVなVR?>
+[rcttr.html]+
+[rcttr2.html]+
+[rcttr3.html]+
+[rcttr4.html]+
+[rcttr5.html]+
+[rcttr6.html]+
+[rcttr6.html]+
>--heli-r001.html-- <論
>+[<論]+
>--t-rex.html--
<ちょっと分割
>+[TVTX]+
まとまり次第分割移行予定。
----戻る----
音楽