〜えるなの日記〜
desu



あいうえお
まず、
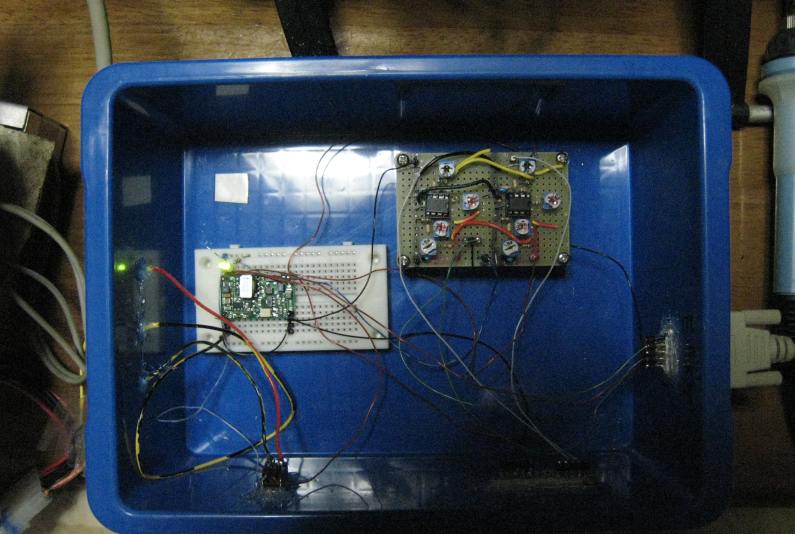
回路だけに電源投入です。
出力が、片方0Vもう片方が10Vです。
片方が断線片方がショートとか、間違ってそうなので、
まず、半導体にさわってみました。
0Vの方が熱かったので、
一回路目の出力を見るとどちらも大丈夫です。
というと、
出力が0Vですから二次側の出力のショートではないか?
ということで、
見たらプロポの端子のショートでした。<切れたつもりが繋がってました。
でもって、
次は、抵抗の接続ミスです。
同じ抵抗を多用してるのと、
同じ回路のバランスの設定を組んでるので、
紛らわしいので、間違って同じ入力に入れてました。
あとは…、
ICを一回路省略して、
単回転トリマーで対処して、
且つ、
狭角可変抵抗でも、360°回る角度センサーにも、
ゲームにも、RCにも、HMDにも使えるという幅広い設定において、
トリムやゲインのダイナミックレンジを大きくとっていたのが不味く、
至ってシビアな調整でした。
まあ、予期されてた問題でしたので、
一回路目と二回路目にダブらせて設定を分散させテタので、
オーダーを決めてから数値を設定する感じで調整です。
注文していたT-REXとモーターが来ました☆
でもって、
サーボを動くに至りました。
20までに作ると予定してて問題なしになったのは、
20日AM01:30くらいでした。
↓動作TESTの動画(6.5MB)
http://clamp-cc.sakura.ne.jp/madia/cont001.avi
これの、
右側の基板を複製するのですが、
今度は、一ヶ所多回転トリマーにします。
機体とプロポの取説を紛失してしまったため、
HMDと操縦桿での機体の調整と操作に
慣れてくるのにまだまだ時間を食いそうですので、
当面二つ追加で十分です。
操縦が出来るヒトが二人いれば、
X3810を親機(肉眼)として、MAX66を子機(HMD)にして、
操縦回路及びHMD回路系のトラブルによる危機を、
回避も出来そうなのですが…、
まあ、ホントは自律安定系(AIを含む)によって回避したいところですが、
最新型の高い送受信機は、電波の問題自体を監視してるようですので、
イキナリ姿勢を崩すコトもないようです。
一応、3軸ジャイロはアルです。
ってか、
ラジコン保険は近年まで更新してたハズなのですが、
昔はヒモで縛って片目で確認状態でしたので、
外でチェックする前に調べとかないと…、
※ラジコン保険
FAAから模型航空機操縦士なる資格の認可がつきます。<これは、飛行機が好きなら、もの凄く嬉しい気持ちです〜☆
で、
機能は、
他人や自分への事故の治療費や損害賠償金を
「アル程度」払ってくれるらしいです。
間違えてはならないのが無謀な過失責任は別の可能性が濃厚です。
だから、ラジコン保険を豪語して目の前で、
危ないことをしてるヒトをみると、
思いやりなど無いのかな?
と思うしだいです。
…いたんです。
RC航空機は見れば判ると思いますが、
手順を守ってても、お気楽にぶっ飛びます。
リンケージが曲がって、イキナリフルスロットル状態とか、
メインローターの翼端がちぎれた。
ぐるぐるピルエット…、
当たったらもの凄いコトになります。
死の恐怖を味わったことがあります。
まあ、バイクでコケるのは怖いですが、
手元にあるような状態で、
油断してると爆弾のようにバキッと来ます。
2008年08月19日(火)
No.264
(未分類)