http://clamp-cc.sakura.ne.jp/soujyuukan.html
これも、昔やってて、
[ http://ameblo.jp/eruna-captor/entry-12259409898.html ]にて興味が再び始まる。
話があちこち飛びますが…、、、
ホールセンサー式-:??
感圧式-:??
感圧式ラダーペダル-:??
が始まり。
接点復活と維持01-:??
MMJOY2で使うArduino互換ボード-:??
ネジ止め剤-:??
ジョイスティックが原因で、PCの画面の電源が休まない。-:??
スティックに使えるSW等。-:??
フライトモノに、メモリーとかLANケーブルとか。-:??
感圧操縦桿と最近の位置コントロール操縦桿の違い。-:??
接点復活と維持02-:??
(電気接点?)フッ素オイル「クライトックスGPL105」とかのうまい使い方。。-:??
メモリー食いなマイクロソフトフライトシミュレーターにメモリースワップファイルを設定する効率的方法。。-:??
XBox360互換コントローラーに変換する。-:??
感圧式ラダーペダルの改善-:??
MicroBなUSBコネクタ破損予防。-:??
10インチタブレットで「原神」用タッチスクリーン用メカニカルジョイスティック改-:??
Gyazoの画像で激重ページに…。
+++++++++++++++++++++++++
CADで作りたいと言えば、「操縦桿」なのですが、
プロポのスティックな回路部分に割り込ませる操縦桿の構造は、
「スラストマスターのFCSおよびWCS」の機構と同じ歯車を組んでポテンショメーターを回す形式にしたいです。
そうすれば、高精度ポテンショメーターからOP-AMPで電圧変化を大きくしたりしないで、パッシブな回路系で済みます。
バックラッシュは、ギヤのモジュール数にもよりますが、間隔をキツキツに調整できるように作るのもミソですね。

 それにしても、市販のRC用の操縦桿、ジョイスティックを改造したモノにもかかわらず、6〜7万とか、バカ高すぎですよね。
業務用の重機とか産業ロボットのコントロールスティックより高いワケで。
意味不明の状態ですねw。
もし、アクティブ回路で作るのなら、
ドリキャスのように、ホール素子の角度ゲージとかでやりたいですね。
既製品:アルプスのRDCC0は一個3024円
外部磁気ノイズについては記述無し。
HOTAS(ホータス)とは「ハンズオンスロットル&スティック」の意味で、
操縦桿から手を離さずに戦闘における全ての操作が完結するような意味です。
ラジコンでも重要ですね。
HATスイッチがトリムになってると良いとか?
ちなみに、
HATスイッチは、内部がアナログパッドに交換されております。
ラダーは、スティックのツイストによるコントロールにしたいと思っております。
ケーブルなんですが、思いのほか、Cat5eのLANケーブルとコネクターが便利かも。
と思っております。
F.Mode(3ポジション)SW
ギアSW
を実装した方が良いですね。
トリガーはアナログに、Txのアナログつまみを用いて。
同様にHAT部分も、
D/RなSWは一つに統合してもイイかも。
スロットル/コレクティブレバーは一工夫必要そうです。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
FCSの内部は、歯車が使われてます。モトのギア比は1:1のようです。
これを、ポテンショメーターの320°を有効活用するように変更します。
それにしても、市販のRC用の操縦桿、ジョイスティックを改造したモノにもかかわらず、6〜7万とか、バカ高すぎですよね。
業務用の重機とか産業ロボットのコントロールスティックより高いワケで。
意味不明の状態ですねw。
もし、アクティブ回路で作るのなら、
ドリキャスのように、ホール素子の角度ゲージとかでやりたいですね。
既製品:アルプスのRDCC0は一個3024円
外部磁気ノイズについては記述無し。
HOTAS(ホータス)とは「ハンズオンスロットル&スティック」の意味で、
操縦桿から手を離さずに戦闘における全ての操作が完結するような意味です。
ラジコンでも重要ですね。
HATスイッチがトリムになってると良いとか?
ちなみに、
HATスイッチは、内部がアナログパッドに交換されております。
ラダーは、スティックのツイストによるコントロールにしたいと思っております。
ケーブルなんですが、思いのほか、Cat5eのLANケーブルとコネクターが便利かも。
と思っております。
F.Mode(3ポジション)SW
ギアSW
を実装した方が良いですね。
トリガーはアナログに、Txのアナログつまみを用いて。
同様にHAT部分も、
D/RなSWは一つに統合してもイイかも。
スロットル/コレクティブレバーは一工夫必要そうです。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
FCSの内部は、歯車が使われてます。モトのギア比は1:1のようです。
これを、ポテンショメーターの320°を有効活用するように変更します。
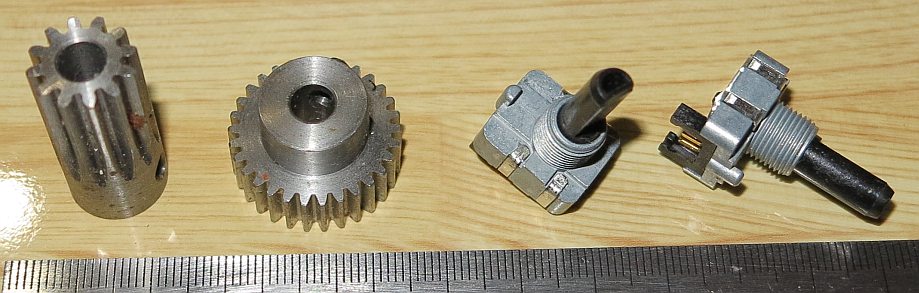
 3Dプリンタで出来るギヤの歯の細かさ(モジュール)は0.7が限界な感じがします。
よって、モジュール0.75にすることにしました。
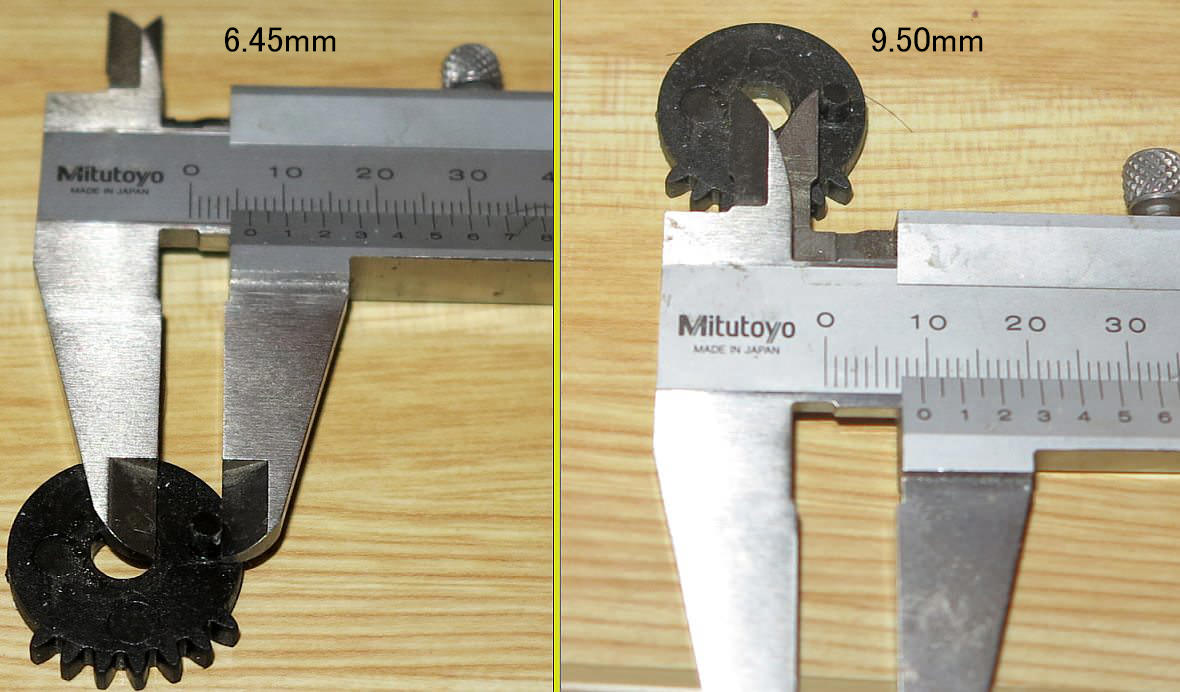
左のは、モジュール1.0、隣のがモジュール0.75のギヤ、右のはポテンショメーター。
3Dプリンタで出来るギヤの歯の細かさ(モジュール)は0.7が限界な感じがします。
よって、モジュール0.75にすることにしました。
左のは、モジュール1.0、隣のがモジュール0.75のギヤ、右のはポテンショメーター。
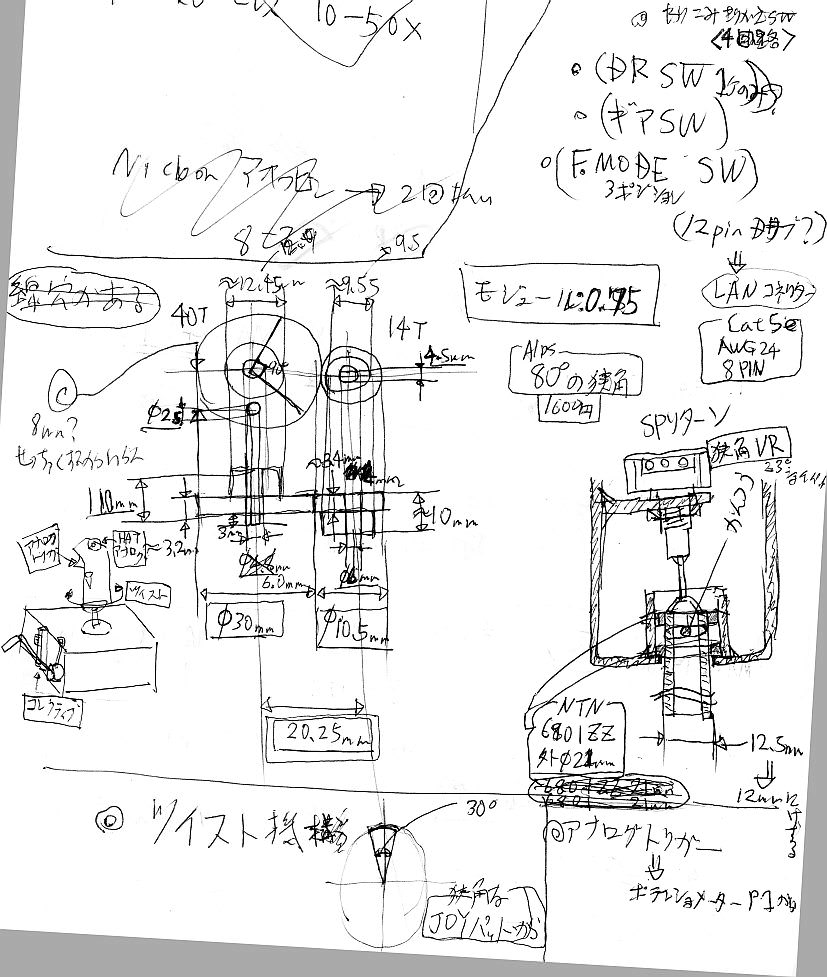
 そうすると、大きいギヤを目一杯大きくするとφ32mm程度なので、
モジュール0.75では40Tでぴったりφ30mm(外形ではないのでこのくらいの余裕が適当)になります。
操縦桿の可動域を見ると、多めに見積もって、70°〜80°に見えるので75°と課程。
ポテンショメーターの可動域が320°なので、
ギヤ比は4が良いと思われますが、
大きなギヤの方が、取り付けクリアランスがφ30mmで限界。
これでは小さい方のギヤが小さすぎ、歯数が粗くなりすぎです。
よって、ギヤ比を3程度まで下げます。
これで、小さいギヤは、14Tとしました。
有効な径(外径ではない)は10.5mm。
よって、
バックラッシュクリアランスを無視すると、
軸と軸の距離は、20.25mmです。
ジンバルの軸はこの位置に、穴を開け直します。
穴は、若干横長にしてクリアランスを調節出来るようにします。
テキトーに採寸と初期の案。
そうすると、大きいギヤを目一杯大きくするとφ32mm程度なので、
モジュール0.75では40Tでぴったりφ30mm(外形ではないのでこのくらいの余裕が適当)になります。
操縦桿の可動域を見ると、多めに見積もって、70°〜80°に見えるので75°と課程。
ポテンショメーターの可動域が320°なので、
ギヤ比は4が良いと思われますが、
大きなギヤの方が、取り付けクリアランスがφ30mmで限界。
これでは小さい方のギヤが小さすぎ、歯数が粗くなりすぎです。
よって、ギヤ比を3程度まで下げます。
これで、小さいギヤは、14Tとしました。
有効な径(外径ではない)は10.5mm。
よって、
バックラッシュクリアランスを無視すると、
軸と軸の距離は、20.25mmです。
ジンバルの軸はこの位置に、穴を開け直します。
穴は、若干横長にしてクリアランスを調節出来るようにします。
テキトーに採寸と初期の案。
 このFCSという操縦桿は、全てがインチ規格ですので、
採寸がちょっと面倒でした。
ギヤ、ネジ、バネ、ベアリングみたいなISO規格。
CADにそろってるモノだと思ってましたが、
特に、ギヤは、外形寸法くらいしか出せません。
普通はそれで事足りてしまうのかもデスね。
歯車は、図面作成する部品の中で一番複雑な部品です。
インボリュート曲線という複雑な曲線を生成するからです。
故に、普通、CADでは歯車を生成出来ません。
で、このツールを探すのに非常に苦労しました。
外形寸法を出すツースはアルのですが、
ギヤそのものは4種類のみ見つかりました。
一つは「CADTOOLメカニカル」という有料のモノ。凄く良く出来てますが38000円。ま、機能が凄いのでソレを考えると安いですけど。
もう一つ「NC INVGEAR」も有償っぽい。
フリーの「inovolute11」AutoCAD用スクリプトを書き出すソフトですが、作ったヒトが専門じゃないので歯の形がおかしい。
で、最後のは、
フリーで「INVOLUTE」AutoCADでインボリュート平歯車を作図するAutoLISPプログラムです。
古いのが理由なのか、ちょっと動作がおかしく歯形の一部しか出ないようですが、Ctrl+Zを連打すると
あらぬ位置に完全体が出現します。
あと、ギヤの谷に線穴が存在します。
このFCSという操縦桿は、全てがインチ規格ですので、
採寸がちょっと面倒でした。
ギヤ、ネジ、バネ、ベアリングみたいなISO規格。
CADにそろってるモノだと思ってましたが、
特に、ギヤは、外形寸法くらいしか出せません。
普通はそれで事足りてしまうのかもデスね。
歯車は、図面作成する部品の中で一番複雑な部品です。
インボリュート曲線という複雑な曲線を生成するからです。
故に、普通、CADでは歯車を生成出来ません。
で、このツールを探すのに非常に苦労しました。
外形寸法を出すツースはアルのですが、
ギヤそのものは4種類のみ見つかりました。
一つは「CADTOOLメカニカル」という有料のモノ。凄く良く出来てますが38000円。ま、機能が凄いのでソレを考えると安いですけど。
もう一つ「NC INVGEAR」も有償っぽい。
フリーの「inovolute11」AutoCAD用スクリプトを書き出すソフトですが、作ったヒトが専門じゃないので歯の形がおかしい。
で、最後のは、
フリーで「INVOLUTE」AutoCADでインボリュート平歯車を作図するAutoLISPプログラムです。
古いのが理由なのか、ちょっと動作がおかしく歯形の一部しか出ないようですが、Ctrl+Zを連打すると
あらぬ位置に完全体が出現します。
あと、ギヤの谷に線穴が存在します。
 これは、物体の内部を指定し、押し出し成形するのに問題が出るかも知れないです。
で、
AutoCADの機能で補正すると、切れてるところが沢山あって、イロイロな円が生成されてしまいます。
よって、使えない。
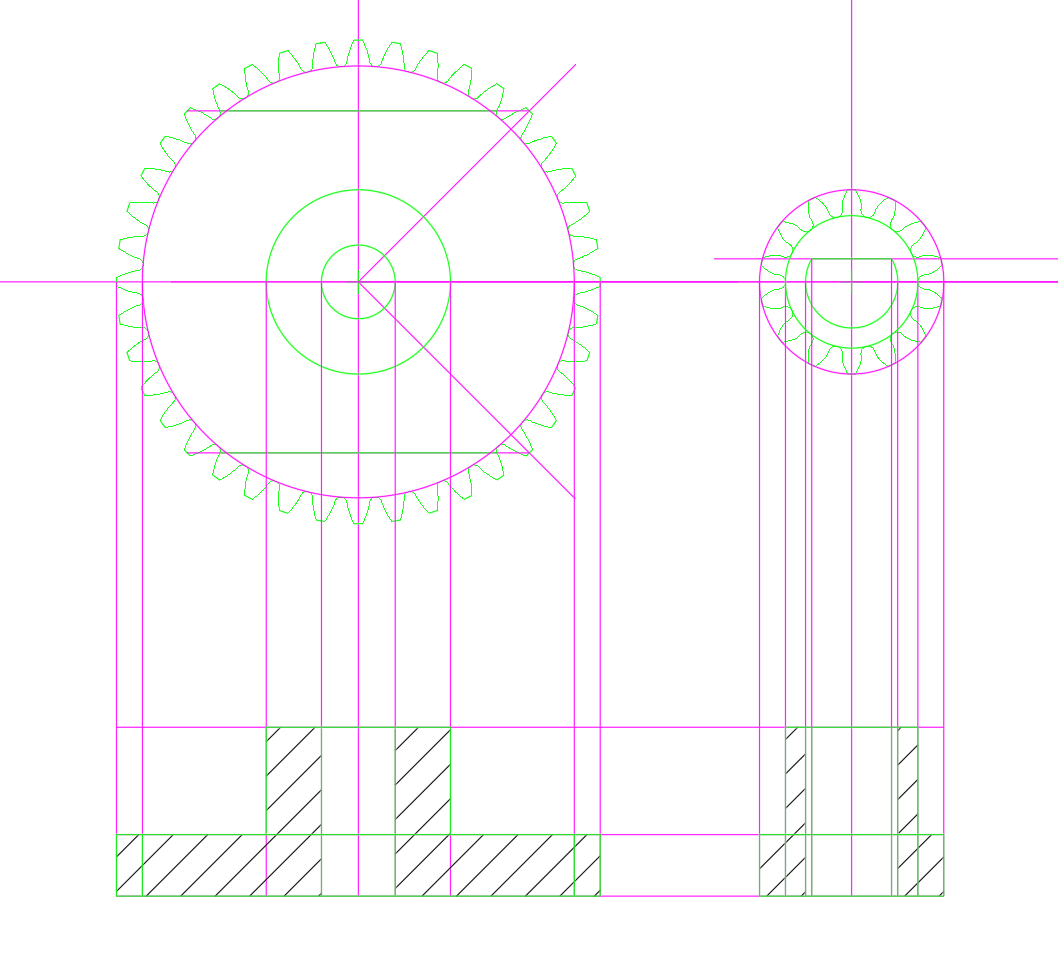
よって、
「CADTOOL体験版」を使用。
「.dxf」形式で出力。
で
AutoCADに読み込ませ、テキトーに横の図と補助線の図にしました。
これは、物体の内部を指定し、押し出し成形するのに問題が出るかも知れないです。
で、
AutoCADの機能で補正すると、切れてるところが沢山あって、イロイロな円が生成されてしまいます。
よって、使えない。
よって、
「CADTOOL体験版」を使用。
「.dxf」形式で出力。
で
AutoCADに読み込ませ、テキトーに横の図と補助線の図にしました。
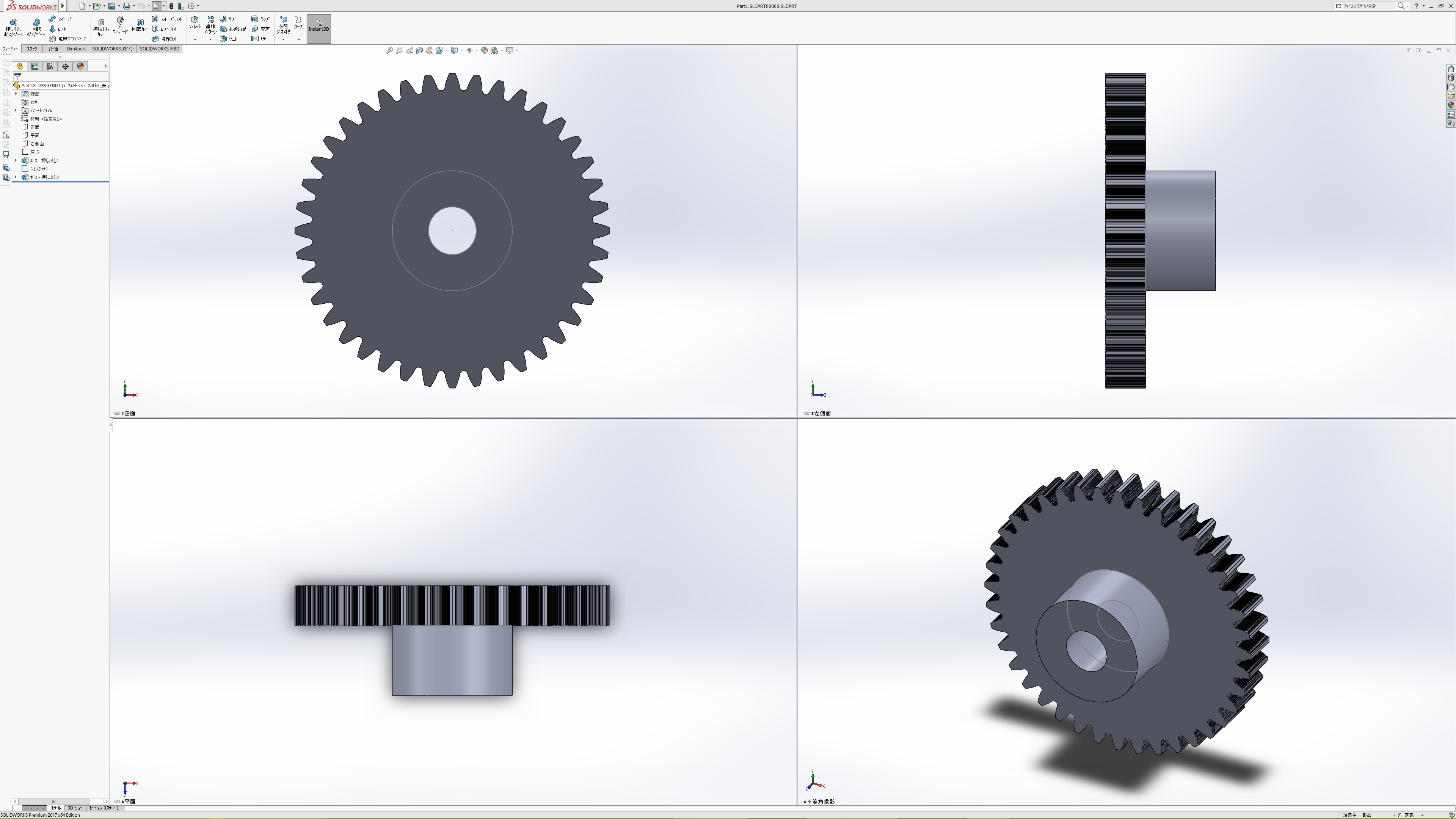
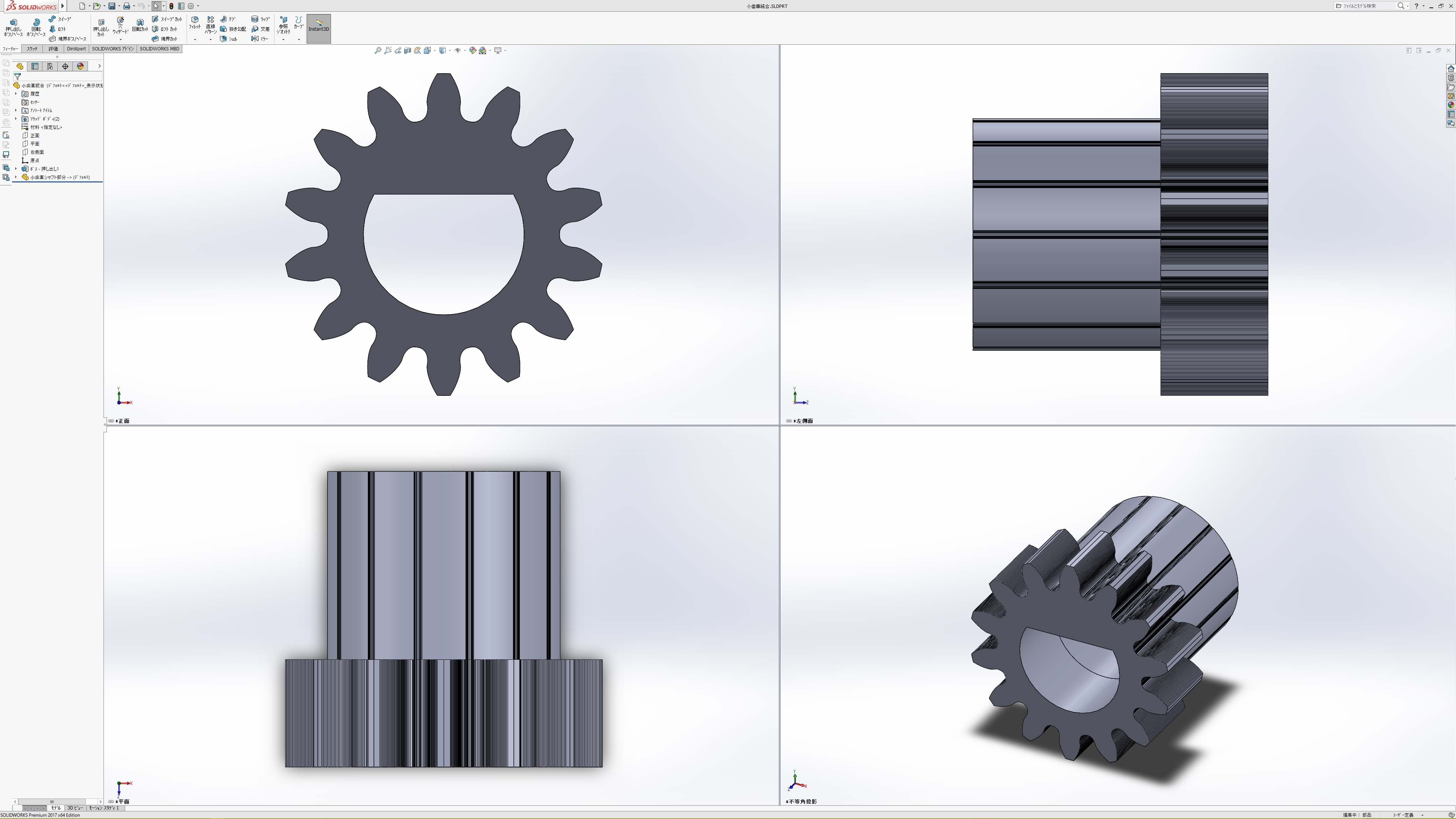
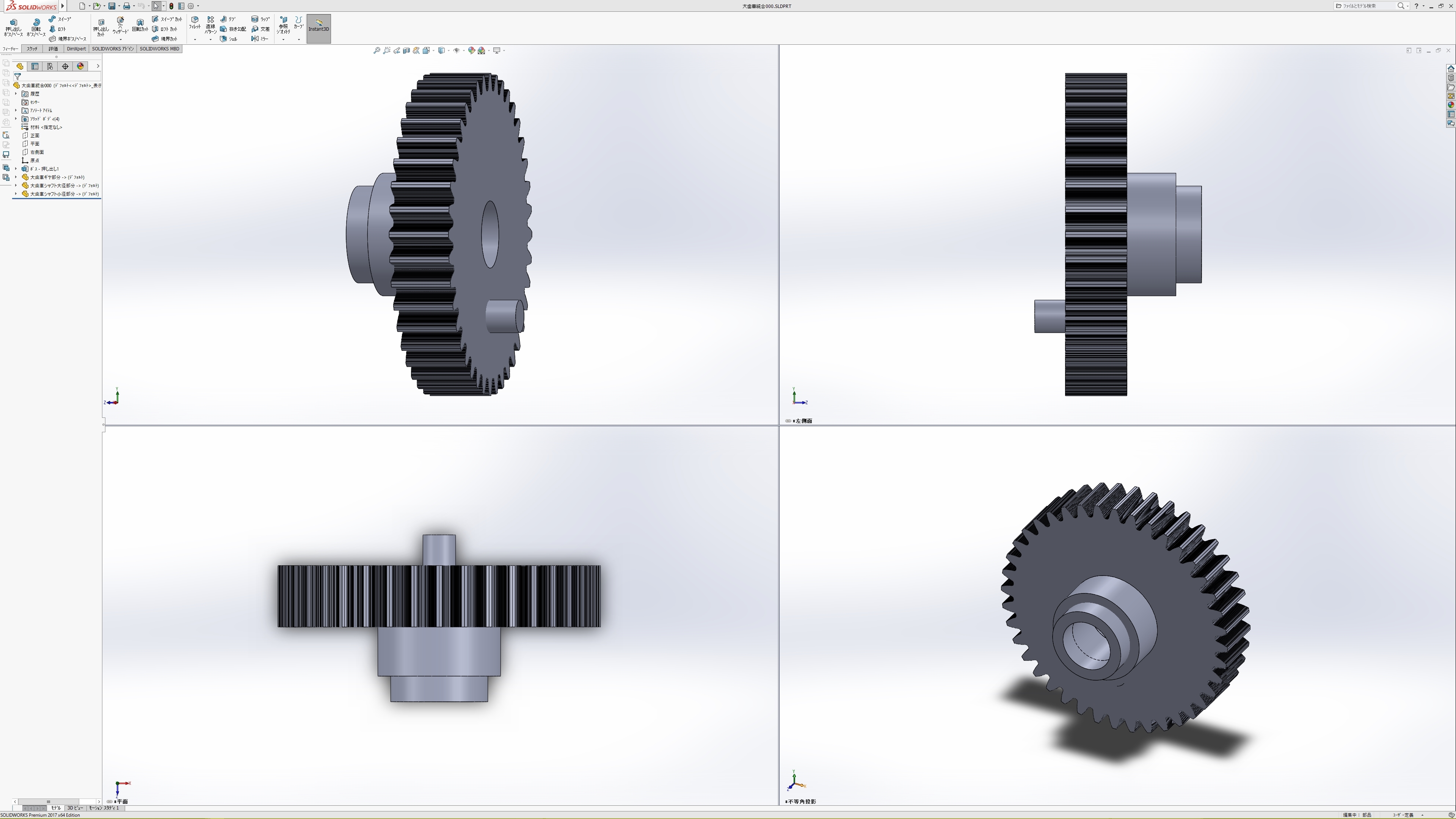
 その後が大変。
SolidWorksは非常に重く、UIも良くない。
なので、
AutoCAD側でギヤ部分とシャフト部分に分割して、
それぞれSolidWorksにて押し出し成形。あとで結合。
https://gyazo.com/01537d36451c48fb96a4c1d9657a5750
その後が大変。
SolidWorksは非常に重く、UIも良くない。
なので、
AutoCAD側でギヤ部分とシャフト部分に分割して、
それぞれSolidWorksにて押し出し成形。あとで結合。
https://gyazo.com/01537d36451c48fb96a4c1d9657a5750
 https://gyazo.com/584b6e5fe8455cca37aeb8de238bd88c
https://gyazo.com/584b6e5fe8455cca37aeb8de238bd88c
 STLで書き出し、
「Netfabb」で修正などして。
3Dプリンタで書き込み。
0.75モジュールは、十分の精度で出ました。
STLで書き出し、
「Netfabb」で修正などして。
3Dプリンタで書き込み。
0.75モジュールは、十分の精度で出ました。
 問題、
・ラフトや台などは外れないので、あらかじめ寸法から引いておくべき。
・予想はしてたが、熱収縮などで?穴に軸がハマらない。
・高密度のサポート材があっても、ちょっと端が欠ける?
・なんだかちょっと中空構造?
最初のは、短く作って、必要ならワッシャー?
問題、
・ラフトや台などは外れないので、あらかじめ寸法から引いておくべき。
・予想はしてたが、熱収縮などで?穴に軸がハマらない。
・高密度のサポート材があっても、ちょっと端が欠ける?
・なんだかちょっと中空構造?
最初のは、短く作って、必要ならワッシャー?
 2番目は、直径を0.2〜0.3mm増やしてみる。
大きすぎるときは、樹脂を流し込む?
最後の二つは、ノズル内部の汚れも影響してるかも、
掃除は、25時間に一度、ノズルに針金を通す処理をするようなのですが…、
まだ、21時間。
穴の寸法を0.3mm程度拡大修正。
はまりました。
ちょっとでこぼこしてるのは、メンテすれば治るかも?
でも、こちらのギヤは、歯を目一杯分厚くというか、全面歯にしてしまった方が、
取り付け時にスムーズにイケルようですので、また変更します。
ノズルの温度も上げた方が良いかも?
綺麗になるとか、強度があがったりありそうです。
ノズルに右のスプレーはとっても良かったです。
上から、左のスプレーで強化?することも出来ます。
2番目は、直径を0.2〜0.3mm増やしてみる。
大きすぎるときは、樹脂を流し込む?
最後の二つは、ノズル内部の汚れも影響してるかも、
掃除は、25時間に一度、ノズルに針金を通す処理をするようなのですが…、
まだ、21時間。
穴の寸法を0.3mm程度拡大修正。
はまりました。
ちょっとでこぼこしてるのは、メンテすれば治るかも?
でも、こちらのギヤは、歯を目一杯分厚くというか、全面歯にしてしまった方が、
取り付け時にスムーズにイケルようですので、また変更します。
ノズルの温度も上げた方が良いかも?
綺麗になるとか、強度があがったりありそうです。
ノズルに右のスプレーはとっても良かったです。
上から、左のスプレーで強化?することも出来ます。
 −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
でもって、
またもや、プラットホームに固着。
このレベルだと、力ずくでは、機械への負担が大きすぎて、ムリ。
そこで、イロイロ考えて見た挙げ句、思いついたのは、
Holtsな強力な塗装剥離剤を〜、
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
でもって、
またもや、プラットホームに固着。
このレベルだと、力ずくでは、機械への負担が大きすぎて、ムリ。
そこで、イロイロ考えて見た挙げ句、思いついたのは、
Holtsな強力な塗装剥離剤を〜、
 ペンチでなるべく取りました。
10分ほどで、
ペンチでなるべく取りました。
10分ほどで、
 ヘラで取って、紙袋に捨てます。
濡らした。キッチンペーパーで拭いて、あとは、薬効成分が自然に消えるのを待てば良いと思います。
ノズルについた樹脂の焦げもとれます。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
ノズルクリーニング用のピンですが、
なるべくノズルを痛めないように。
600番のヤスリで先端部分を面取りしました。
ヘラで取って、紙袋に捨てます。
濡らした。キッチンペーパーで拭いて、あとは、薬効成分が自然に消えるのを待てば良いと思います。
ノズルについた樹脂の焦げもとれます。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
ノズルクリーニング用のピンですが、
なるべくノズルを痛めないように。
600番のヤスリで先端部分を面取りしました。
 差し込んでみた感じ、結構細いので、余裕がアル感じで刺さりました。
ノズルには、何の負担もなさそうです。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
追記01>
プラットホームに耐熱マスキングテープを貼って、スティックのりを塗ると良いとか、
で、注文してみました。
差し込んでみた感じ、結構細いので、余裕がアル感じで刺さりました。
ノズルには、何の負担もなさそうです。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
追記01>
プラットホームに耐熱マスキングテープを貼って、スティックのりを塗ると良いとか、
で、注文してみました。
 あとは、ラダーツイスト機構用なパーツとか。
FDMタイプの3Dプリンターは細かいモノがニガテらしく
ノズル径の3倍未満の幅は中空になりやすいとか聞きました。
スライスパターンがどうなってるのかとか、FWとかの影響もあるのでしょうけど、
なるべく、温度管理などで、密着度を上げて、強度を維持したいですね。
あと、充填構造を、格子からハニカムに変えてみると改善するかも?
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
追記02>
KHKのサイトに
ギヤの強度演算スクリプトのようなモノがあるのですが、
DXF出力もあります。
しかし、
まず、
尺度1が出せないので、10倍で出します。
そうすると、DXFでは、一山の半分が出力されます。
まあ、簡単に完全体を出すことはさせないようです。
そのへん、かなりセキュアに思いました。
このDATAでやるとなると、
まず反転させて、一山作って、
360/Tずつ回して、キリの良いとこで、それをまとめて更に回す感じですね。
で、縮尺を戻す感じ。
これで、もし、歯同士を結ぶ線が切れてたら手間ですね。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
追記03>
ギヤ部分を分解して取り外してみたらもっと入り組んでたので、
採寸して作り直しました。
https://gyazo.com/3f52719a69bf58a294f936aa9b354e6f
あとは、ラダーツイスト機構用なパーツとか。
FDMタイプの3Dプリンターは細かいモノがニガテらしく
ノズル径の3倍未満の幅は中空になりやすいとか聞きました。
スライスパターンがどうなってるのかとか、FWとかの影響もあるのでしょうけど、
なるべく、温度管理などで、密着度を上げて、強度を維持したいですね。
あと、充填構造を、格子からハニカムに変えてみると改善するかも?
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
追記02>
KHKのサイトに
ギヤの強度演算スクリプトのようなモノがあるのですが、
DXF出力もあります。
しかし、
まず、
尺度1が出せないので、10倍で出します。
そうすると、DXFでは、一山の半分が出力されます。
まあ、簡単に完全体を出すことはさせないようです。
そのへん、かなりセキュアに思いました。
このDATAでやるとなると、
まず反転させて、一山作って、
360/Tずつ回して、キリの良いとこで、それをまとめて更に回す感じですね。
で、縮尺を戻す感じ。
これで、もし、歯同士を結ぶ線が切れてたら手間ですね。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
追記03>
ギヤ部分を分解して取り外してみたらもっと入り組んでたので、
採寸して作り直しました。
https://gyazo.com/3f52719a69bf58a294f936aa9b354e6f
 −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
+++++++++++++++++++++++++
取り付けは、多分、ガタ予防に円錐状の皿ネジでして、
それは良いのですが、
ネジの規格がインチねじで、六角レンチもインチ規格でして、
適当にハマるモノが無いです。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
+++++++++++++++++++++++++
取り付けは、多分、ガタ予防に円錐状の皿ネジでして、
それは良いのですが、
ネジの規格がインチねじで、六角レンチもインチ規格でして、
適当にハマるモノが無いです。
 よって、
反対側からネジの軸をラジペンで回して取りました。
よって、
反対側からネジの軸をラジペンで回して取りました。
 また、外すとなると、キツく締めたり、ヘタに強いネジ止め剤は使えないですね。
唯一VRの取り付けネジのみ、
通常の太めのVRの軸と互換の9ミリネジだったようです。
フライス盤で穴を横に広げました。
また、外すとなると、キツく締めたり、ヘタに強いネジ止め剤は使えないですね。
唯一VRの取り付けネジのみ、
通常の太めのVRの軸と互換の9ミリネジだったようです。
フライス盤で穴を横に広げました。
 VR軸の差し込み穴は、モトの穴が若干大きかったので、
ワッシャーがあると良い感じです。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
ダボ的部分とギヤの中心軸の距離はちょっと測定方法を考えないとマトモに出せないですね。
はめ合い部分なので、中途半端な精度では許されない部分です。
で、
測り方と、その算出を考えて、。
VR軸の差し込み穴は、モトの穴が若干大きかったので、
ワッシャーがあると良い感じです。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
ダボ的部分とギヤの中心軸の距離はちょっと測定方法を考えないとマトモに出せないですね。
はめ合い部分なので、中途半端な精度では許されない部分です。
で、
測り方と、その算出を考えて、。
 (6.45+9.5)/2≒8.0mm
なんだか、キリが良いですね。
軸径以外は結構、採寸キツキツに合わせてる部分が多いですので、
あとで、削って調節する必要が出てきそうです。
特に、ダボ部分は熱収縮でズレそう…。
軸と固定ではなく、良く滑って欲しい部分は、ココ。
(6.45+9.5)/2≒8.0mm
なんだか、キリが良いですね。
軸径以外は結構、採寸キツキツに合わせてる部分が多いですので、
あとで、削って調節する必要が出てきそうです。
特に、ダボ部分は熱収縮でズレそう…。
軸と固定ではなく、良く滑って欲しい部分は、ココ。
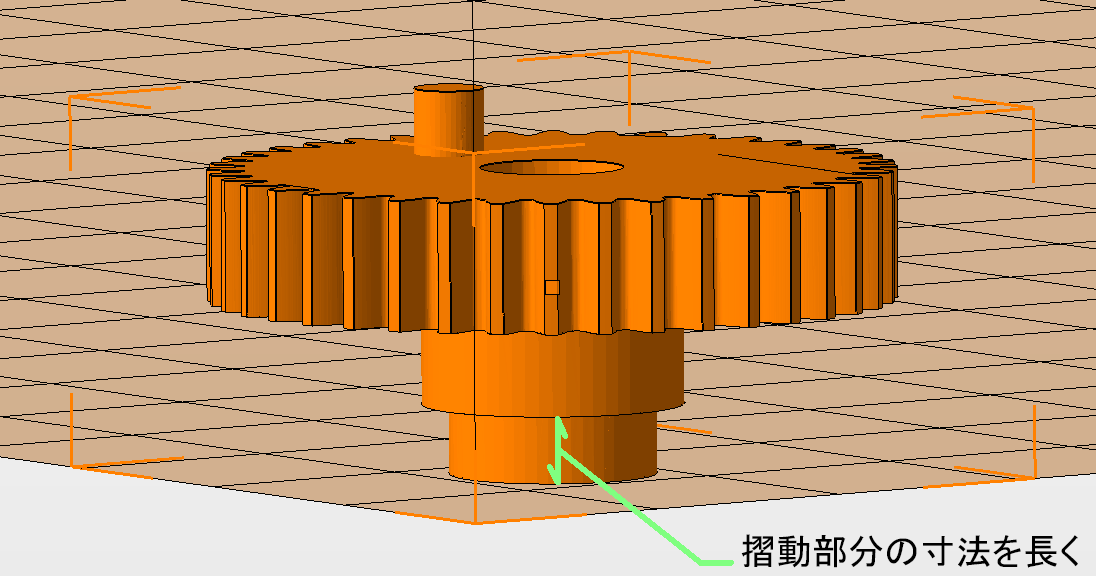 よってこの軸は、採寸より若干長くなるように設定してみました。
マスキングテープの上にスティックノリを塗る。
充填構造は、ハニカムに。
------------------------------------
よってこの軸は、採寸より若干長くなるように設定してみました。
マスキングテープの上にスティックノリを塗る。
充填構造は、ハニカムに。
------------------------------------
 ラフトを剥がそうとすると、長くしたかった軸の部分が、中途なトコで折れてしまいましたが、
このまま使おうと思います。
やっぱ、ノズル温度がもうちょっと高い方がお互いが良く融着して良いのかもデスね。
でもって、最も上手くいきそうになかったダボですが、
意外にもダボはぴったりとはまりました。
ラフトを剥がそうとすると、長くしたかった軸の部分が、中途なトコで折れてしまいましたが、
このまま使おうと思います。
やっぱ、ノズル温度がもうちょっと高い方がお互いが良く融着して良いのかもデスね。
でもって、最も上手くいきそうになかったダボですが、
意外にもダボはぴったりとはまりました。
 コントロールスティックのリターンスプリングは、
ある程度閾値があり、定荷重バネに近い要素がある方が良いようですね。
(完全に定荷重だとダメなようですが、)
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
ポテンショメーターの接続は、
Molex(モレックス) 2.0mmピッチ 電線対電線 51005/51006シリーズ リセプタクルハウジング 3P
というモノがくっつきます。
2Pなら、ワリケラな小型機のバッテリーコネクタに使われてますね。
コントロールスティックのリターンスプリングは、
ある程度閾値があり、定荷重バネに近い要素がある方が良いようですね。
(完全に定荷重だとダメなようですが、)
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
ポテンショメーターの接続は、
Molex(モレックス) 2.0mmピッチ 電線対電線 51005/51006シリーズ リセプタクルハウジング 3P
というモノがくっつきます。
2Pなら、ワリケラな小型機のバッテリーコネクタに使われてますね。

 +++++++++++++++++++++++++
昔作ったのは、
狭角抵抗やギヤを使わず、電圧出力を、OP-AMPで好きに増幅してたのですが、調整が自由な代わりに、電源などを必要とし、
また、ラダーがペダルだったので、
重装備故に使ってられない感じでした。
+++++++++++++++++++++++++
昔作ったのは、
狭角抵抗やギヤを使わず、電圧出力を、OP-AMPで好きに増幅してたのですが、調整が自由な代わりに、電源などを必要とし、
また、ラダーがペダルだったので、
重装備故に使ってられない感じでした。
 ポテンショメーターは、ギヤ無しで普通の可変抵抗を使い、
トリム、舵最大舵角を設定でき、大まかな値は、ラジケーターで確認出来るようにしてありました。
9ピンDサブコネクタの付いた、ケーブルを使用してプロポと接続してました。
ゲームパッドには25ピンDサブでつなげて兼用にもなってました。
+++++++++++++++++++++++++
でもって、
今回は、ギヤを用いたパッシブ回路で、
ラダーをツイスト機構にします。
まず、
ラダーをツイスト機構にするため、ボールベアリングをはめます。
ベアリングは、1/2インチシャフト用内径12.7mmので、木工用切削ビット用のを使いました。
ポテンショメーターは、ギヤ無しで普通の可変抵抗を使い、
トリム、舵最大舵角を設定でき、大まかな値は、ラジケーターで確認出来るようにしてありました。
9ピンDサブコネクタの付いた、ケーブルを使用してプロポと接続してました。
ゲームパッドには25ピンDサブでつなげて兼用にもなってました。
+++++++++++++++++++++++++
でもって、
今回は、ギヤを用いたパッシブ回路で、
ラダーをツイスト機構にします。
まず、
ラダーをツイスト機構にするため、ボールベアリングをはめます。
ベアリングは、1/2インチシャフト用内径12.7mmので、木工用切削ビット用のを使いました。
 ネジ穴だったところを広げて、φ3mmのカーボンの棒をはめます。
スロットルをスライド型のポテンショメーターにしてみることにしました。
で、他のパーツとかイロイロめんどいのでケース上部にスペーサーをはめてみました。
ネジ穴だったところを広げて、φ3mmのカーボンの棒をはめます。
スロットルをスライド型のポテンショメーターにしてみることにしました。
で、他のパーツとかイロイロめんどいのでケース上部にスペーサーをはめてみました。
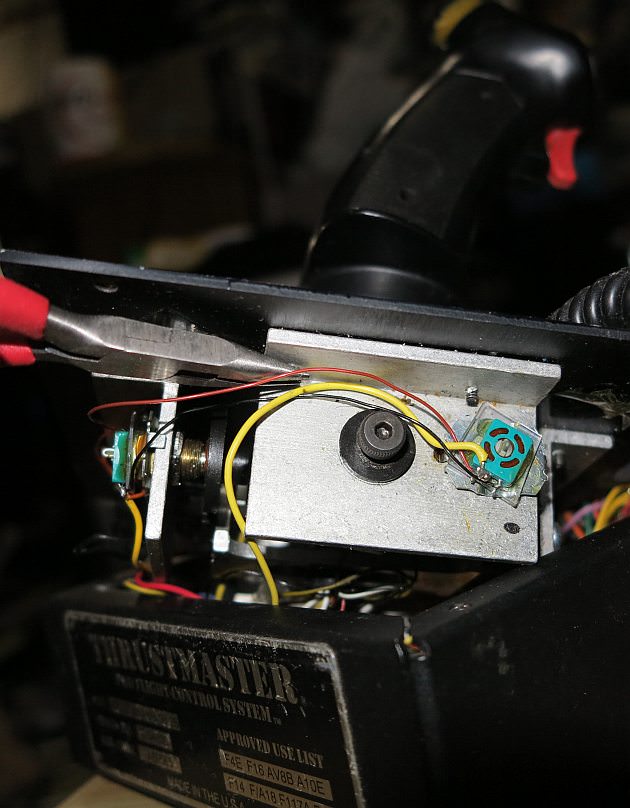
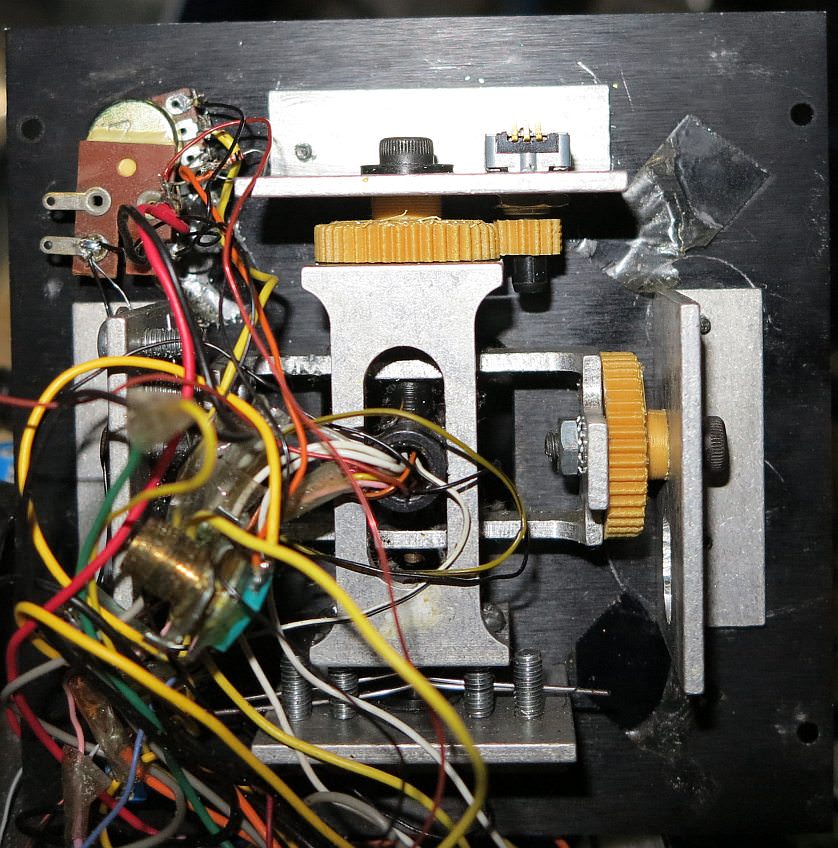
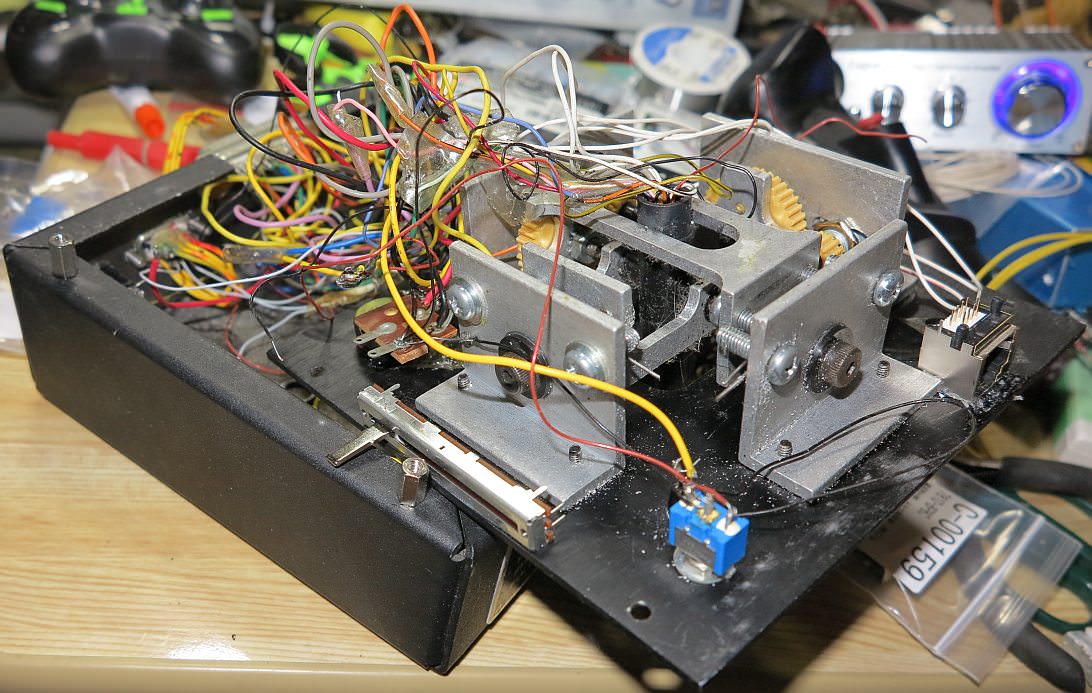
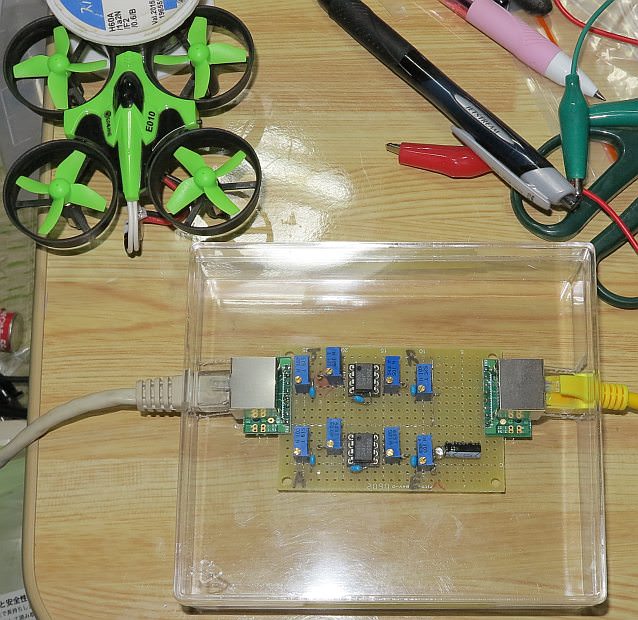
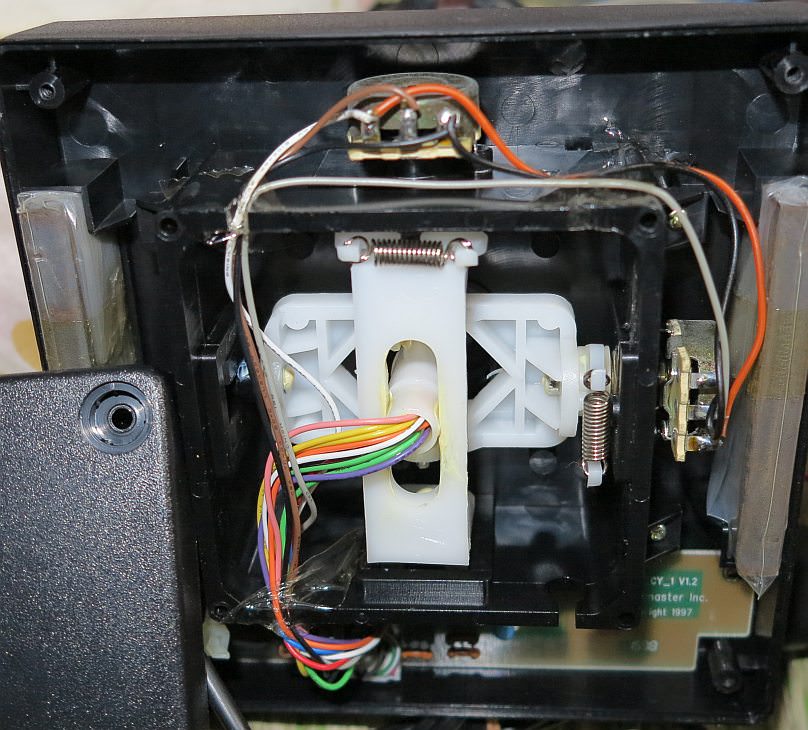
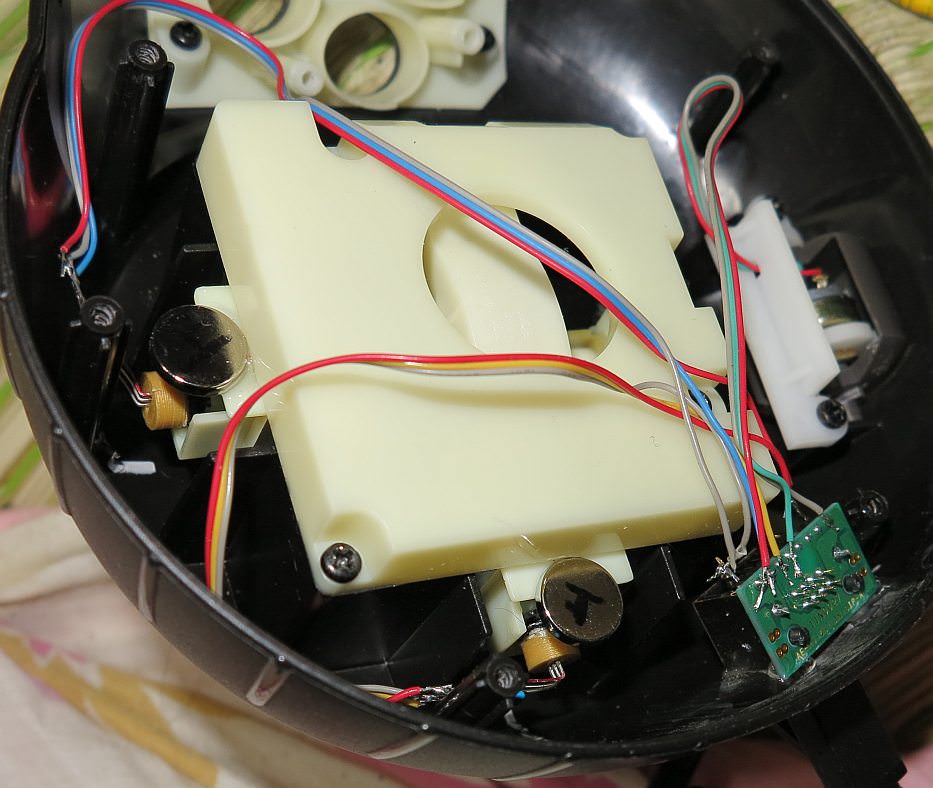
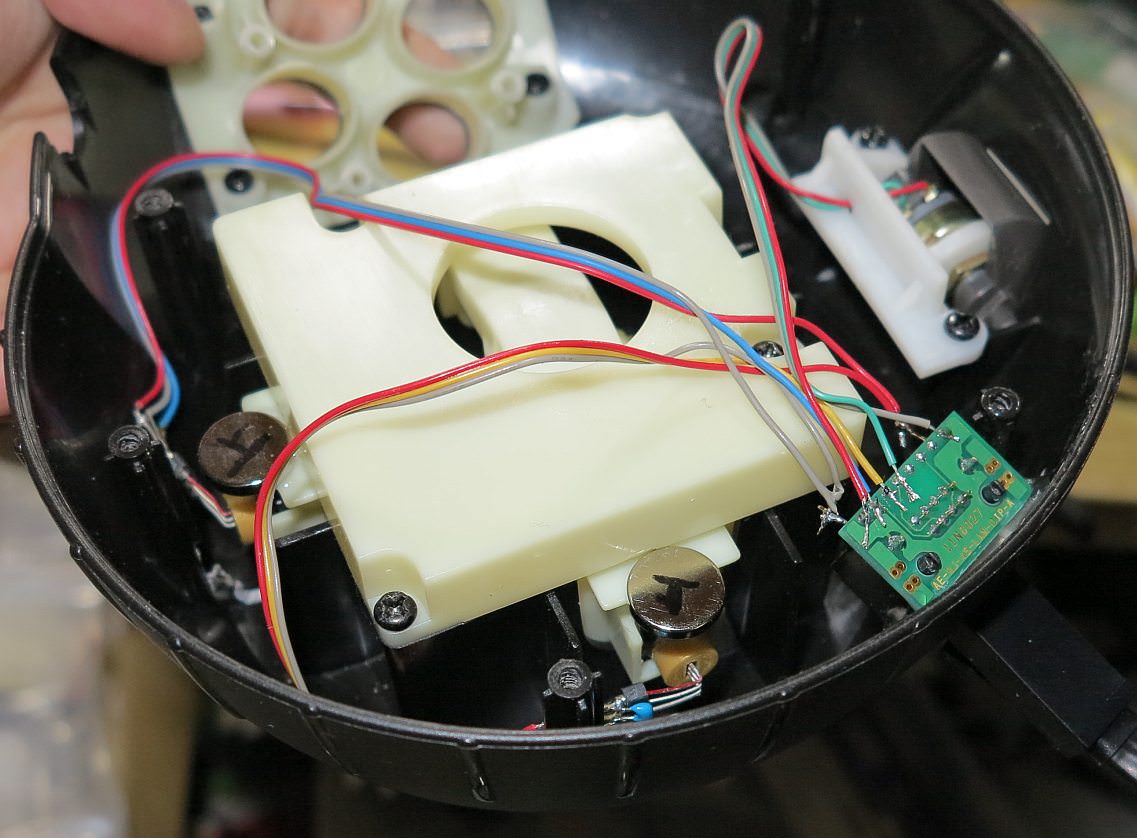
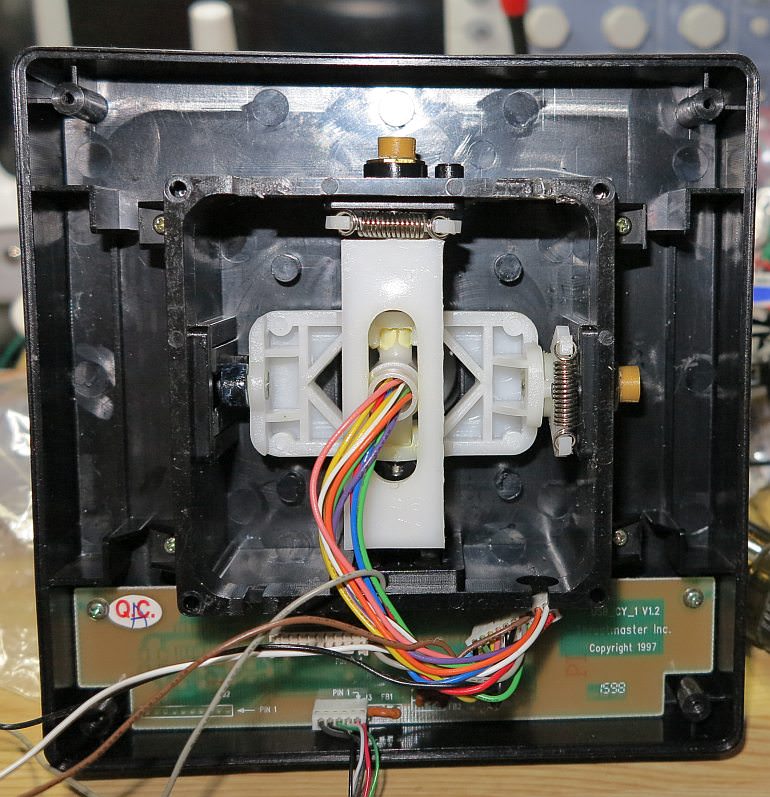
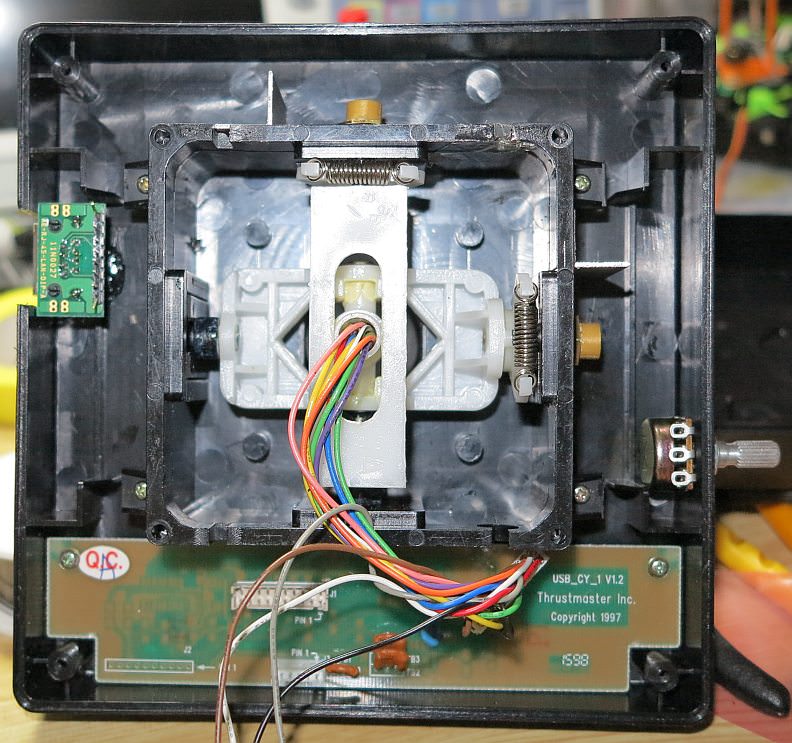
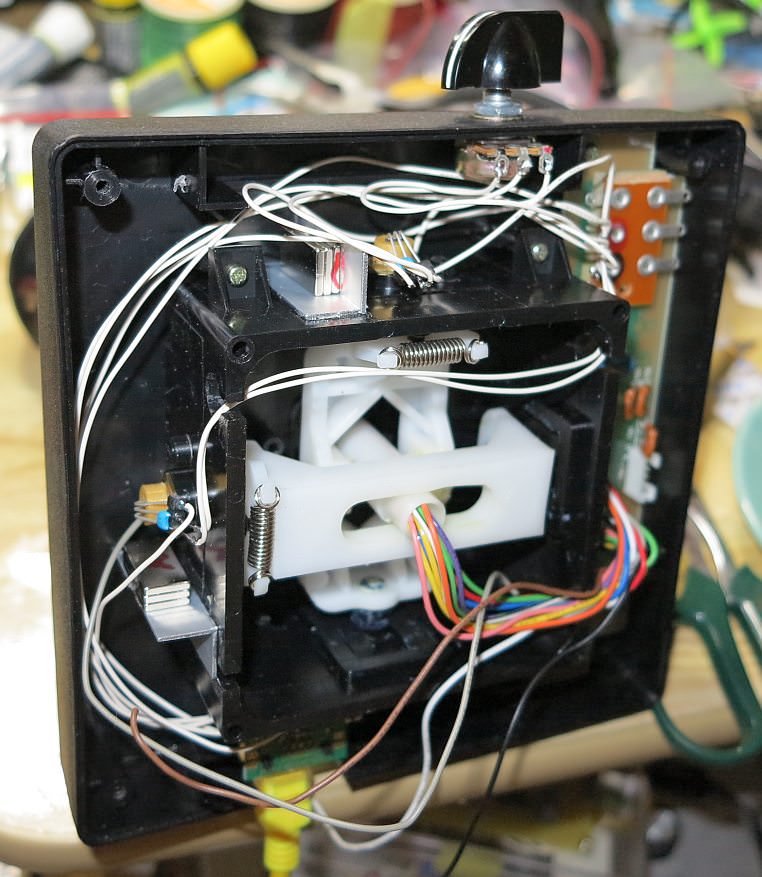
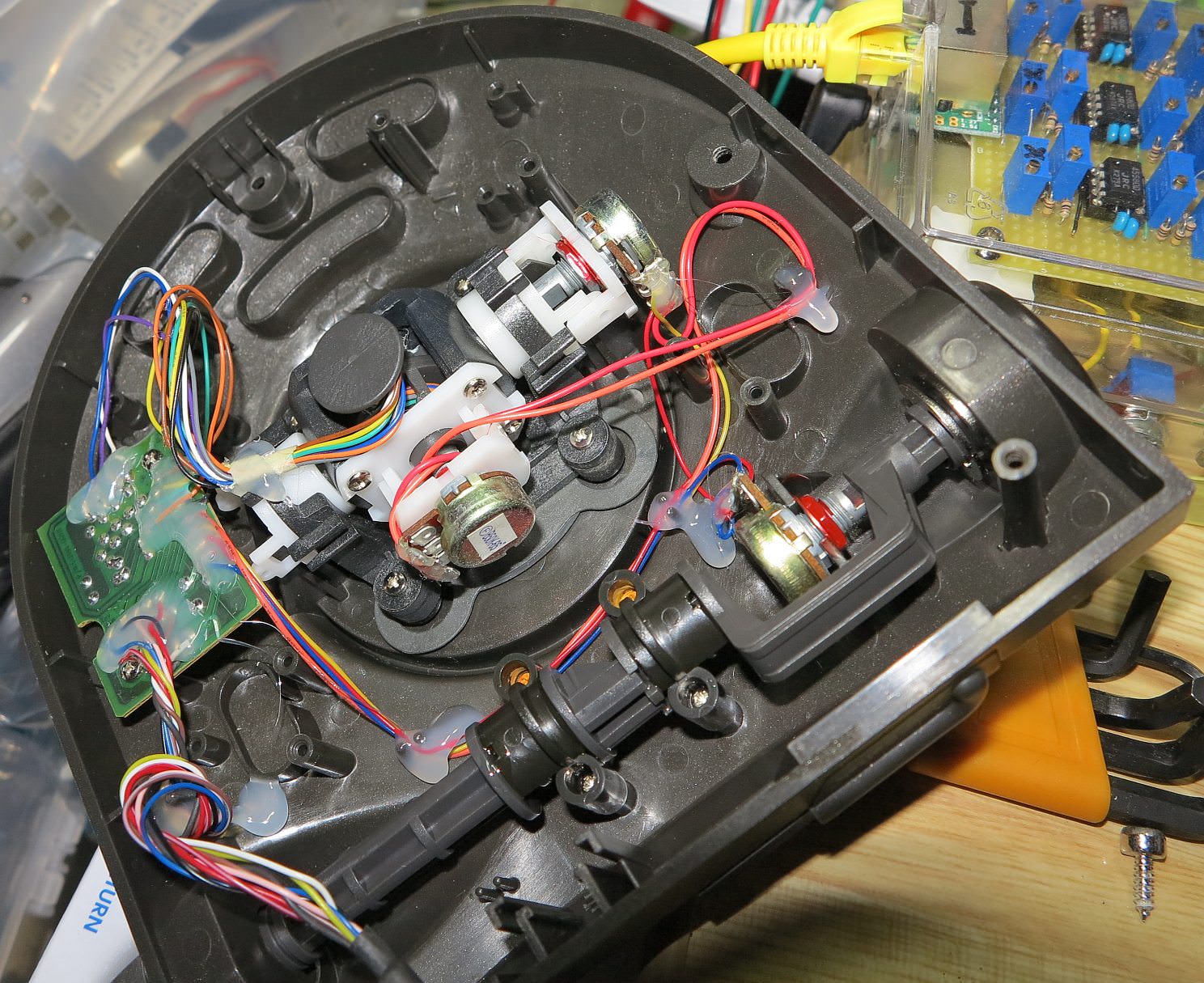
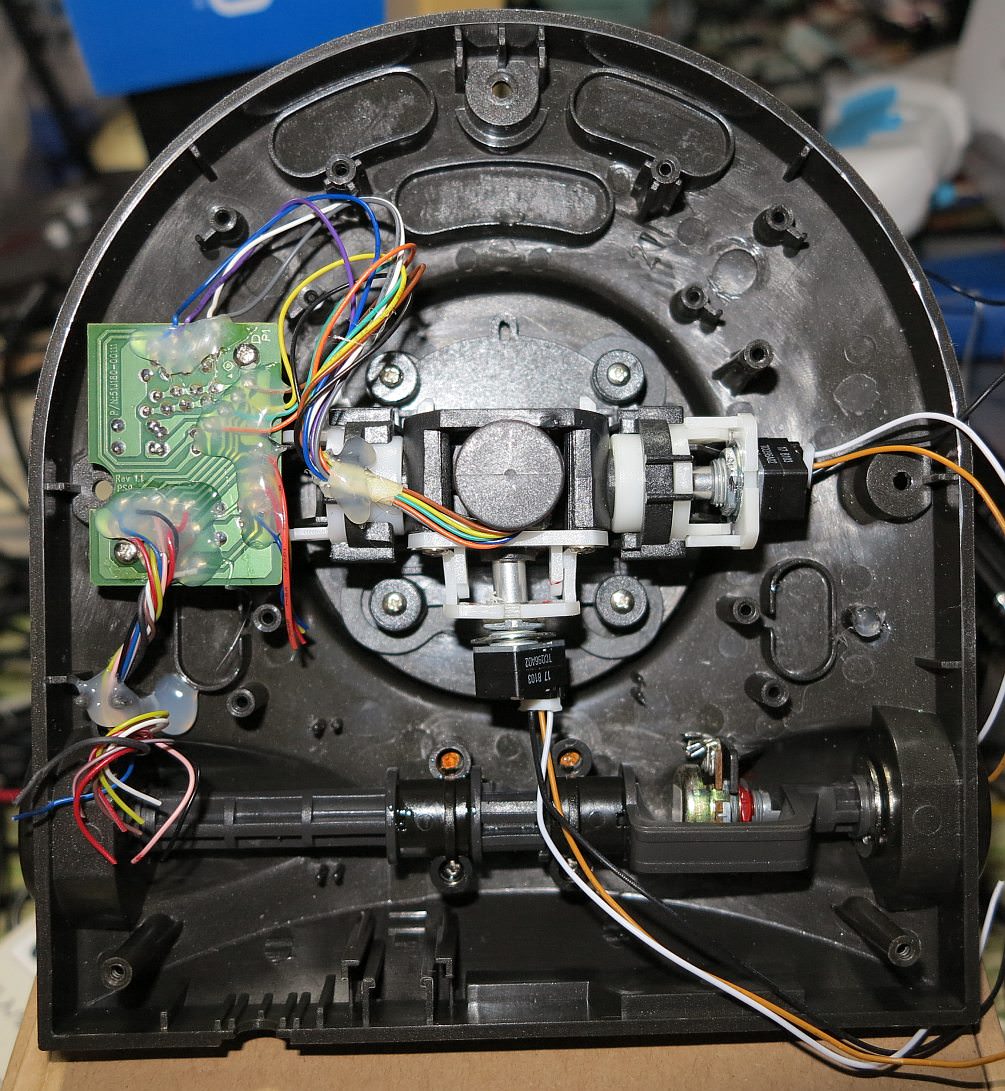
 裏から見ると、こんな感じです。
プロポと接続用のLANケーブル用ソケットもありますね。
アッパーフレームに部品を付けた方が、ケーブルに負担もかからず、
フタを空ける作業もラクです。
LANケーブルは、コネクタが付いてて安価だったりイロイロとお得なので…、
裏から見ると、こんな感じです。
プロポと接続用のLANケーブル用ソケットもありますね。
アッパーフレームに部品を付けた方が、ケーブルに負担もかからず、
フタを空ける作業もラクです。
LANケーブルは、コネクタが付いてて安価だったりイロイロとお得なので…、
 で、CADで部品を造り、
3Dプリンターで出力します。
で、CADで部品を造り、
3Dプリンターで出力します。
 径を0.4mmオーバーサイズに作ってハマりました。
径を0.4mmオーバーサイズに作ってハマりました。
 スーパーXとかSUとかで、間を埋めながら接着です。
スーパーXとかSUとかで、間を埋めながら接着です。
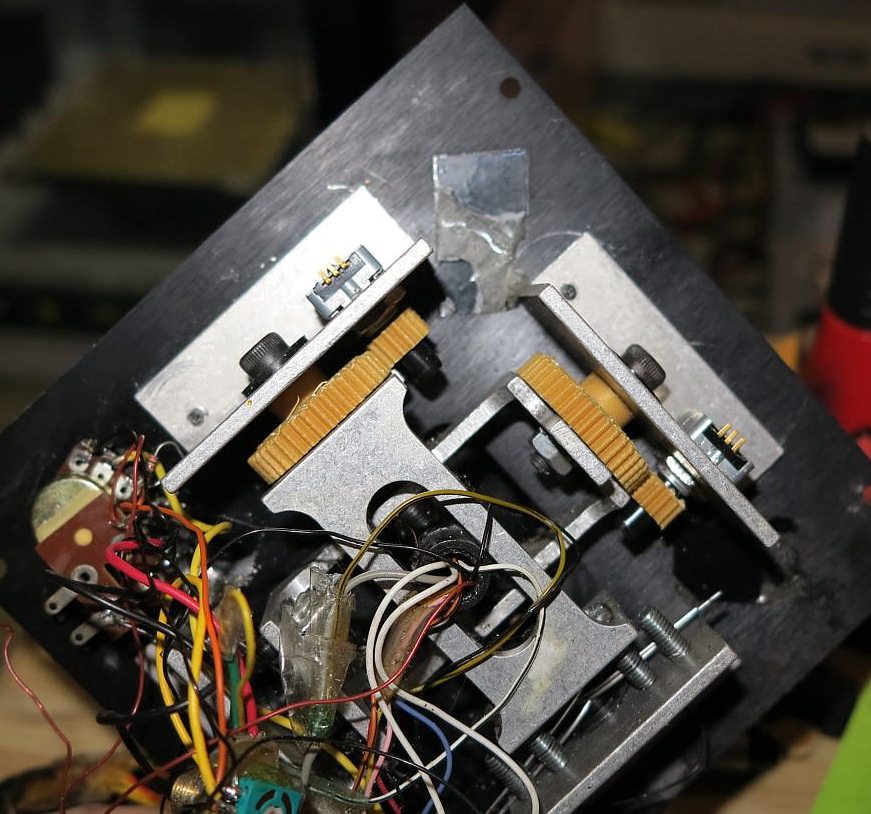
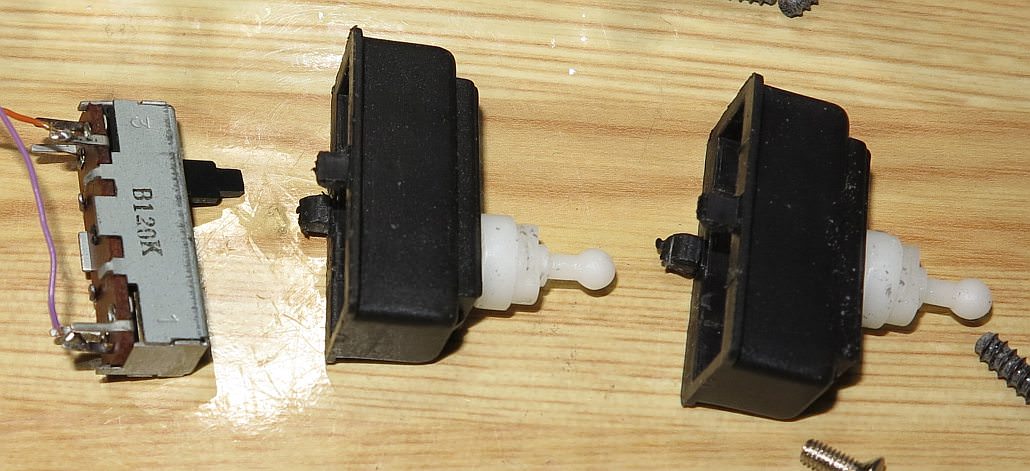
 プロポ側です。
12Pトグルスイッチで切り替えます。
経験上、ケーブルのツイストはあまり必要無いようで必須ではないです。
プロポ側です。
12Pトグルスイッチで切り替えます。
経験上、ケーブルのツイストはあまり必要無いようで必須ではないです。
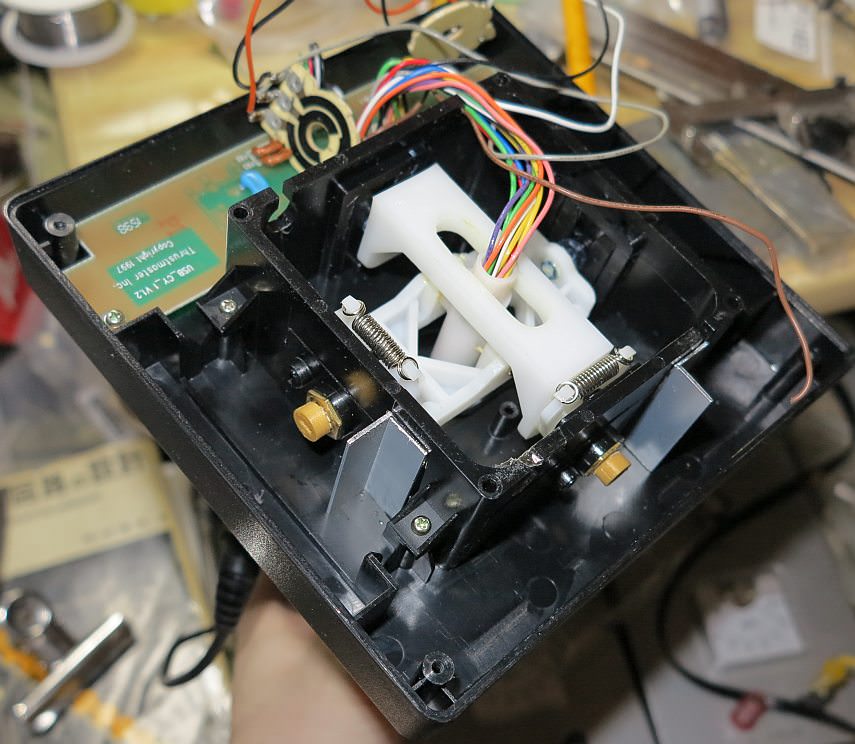
 こちらもLANケーブルのソケットが付いてますね。
テキトーに切ったので、穴がでかいです。
こちらもLANケーブルのソケットが付いてますね。
テキトーに切ったので、穴がでかいです。
 接続の図。
接続の図。
 ジョイスティック側、
ジョイスティック側、
 LANケーブルは8芯なので、あと2ch余裕があります。
プロポのポテンショメーターのchを割り当てて、
フライトモードSWや、アナログトリガーなどイロイロ発展して使えそうです。
ラダー用の狭角ポテンショメーターは、
ALPSのジョイスティックの狭角なタイプから切り出して使用します。
LANケーブルは8芯なので、あと2ch余裕があります。
プロポのポテンショメーターのchを割り当てて、
フライトモードSWや、アナログトリガーなどイロイロ発展して使えそうです。
ラダー用の狭角ポテンショメーターは、
ALPSのジョイスティックの狭角なタイプから切り出して使用します。
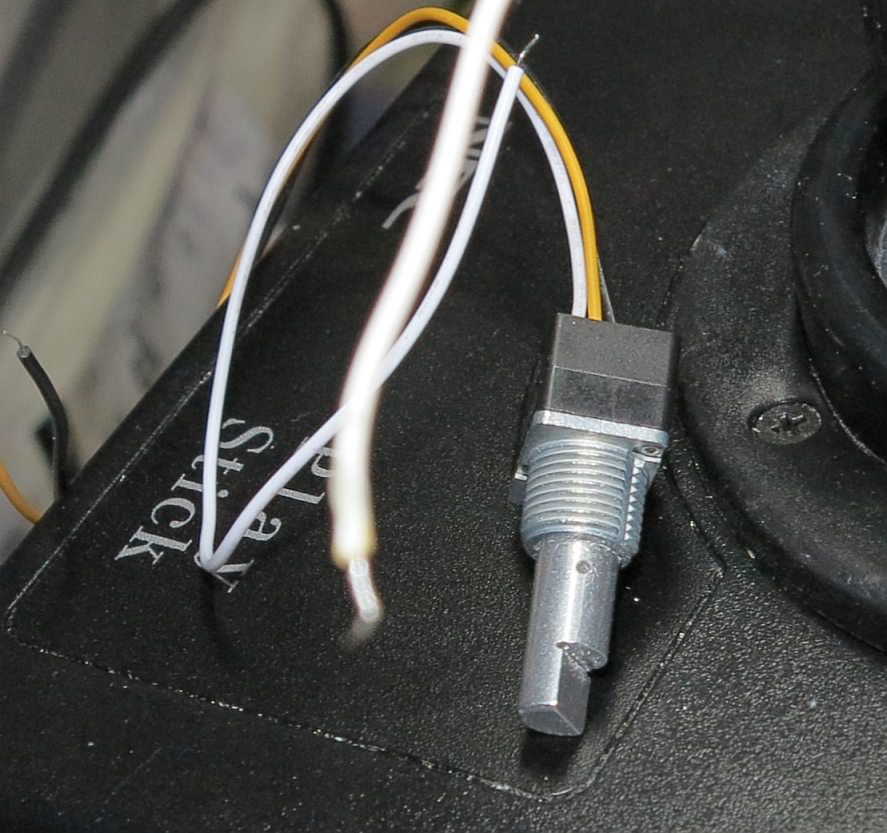
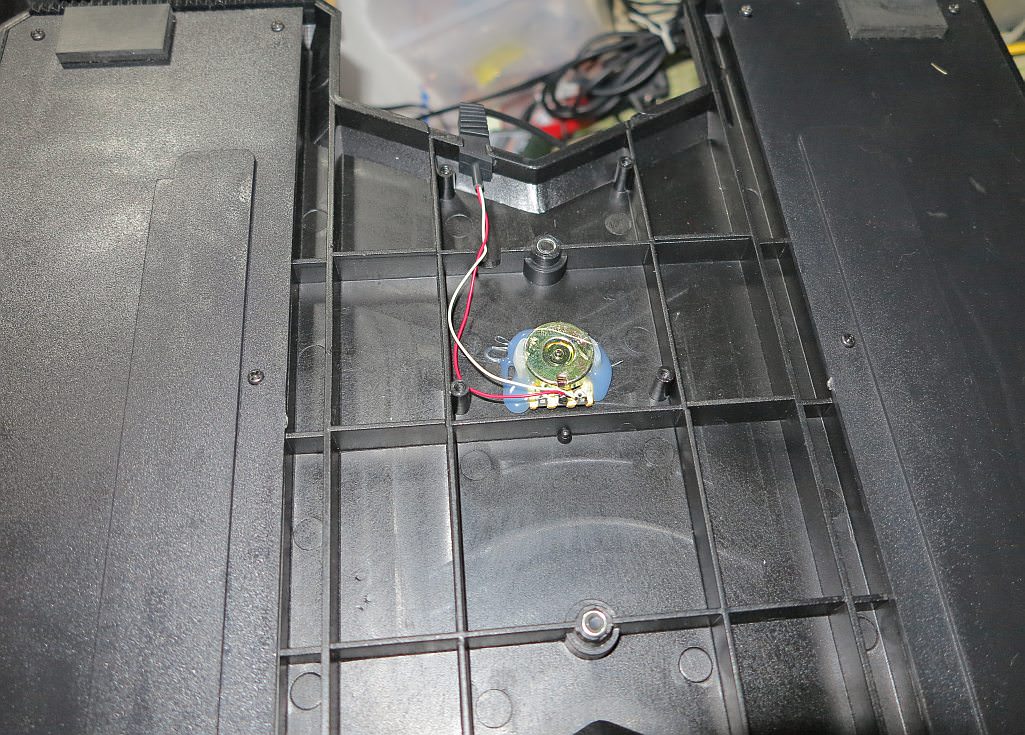
 とりあえず、これを操縦桿内部に固定。
フレキシブルジョイント代わりにコイルバネを使用。
とりあえず、これを操縦桿内部に固定。
フレキシブルジョイント代わりにコイルバネを使用。
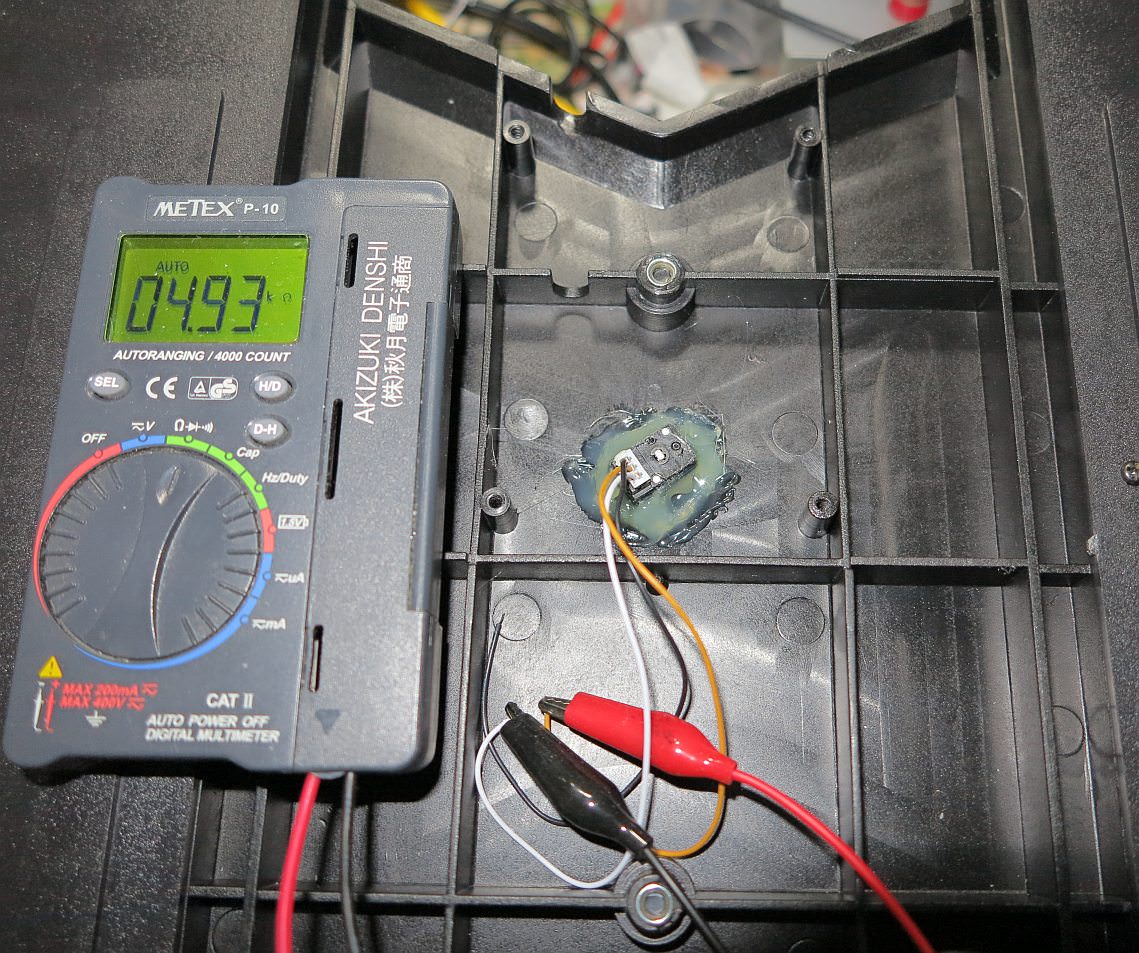
 バネを接着剤で取り付け、端子を半田付けました。
バネを接着剤で取り付け、端子を半田付けました。
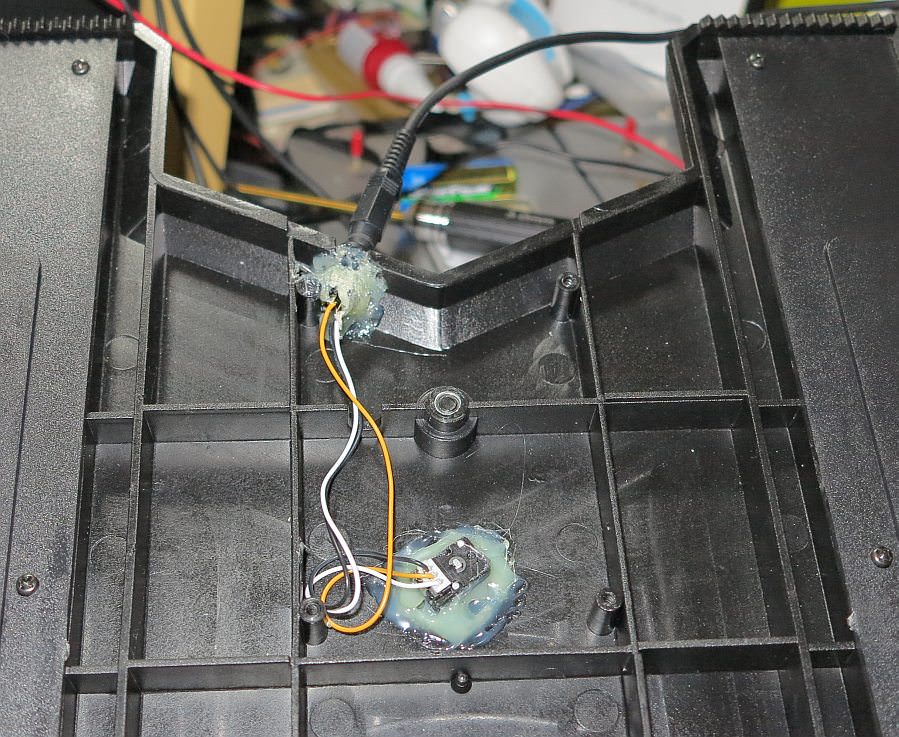
 溝に押しバネを入れるようなイメージで漠然と設計したのですが、
上手くいかないので、とりあえず、輪ゴムで代用。
多分、耐久性の高いポリウレタンゴム?がイイかも。
溝に押しバネを入れるようなイメージで漠然と設計したのですが、
上手くいかないので、とりあえず、輪ゴムで代用。
多分、耐久性の高いポリウレタンゴム?がイイかも。
 セットアップした画面。
セットアップした画面。
 動かして見ると、ラダーとスロットル以外は、
最大舵角が小さい。
よって、キャリブレーションすれば良い気もしますが、
紛らわしいことになるので、操舵のD/Rウェイト値を125%にしました。
+++++++++++++++++++++++++
で、扱いやすいマイクロクワッドE010にて、
実際の室内飛行。
まず、前後のスライドでは、
スロットルの方向性が直観的につかみにくい。
よって、上下が安定しない。
ラダーは慣れが必要な上に、舵が残りセンターがハッキリしないのでヨー軸も安定しない。
よって、操縦しにくいです。
トリムのズレもあります。
これらに対応できれば、とても扱いやすくなるはず。(多分プロポよりも)
ラダーは、フレキシブルジョイント的部分のねじれが若干残ります。
EXPを45にしてセンターズレに鈍感にして目立たなくしました。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
次に、FPV+HMDでやってみました。。
楽になると思ってたのに、驚くほど飛ばせない。
プロポなら数分はOkなハズなのに、飛行時間十数秒が良いとこ。
まず、やっぱ、上下動が問題。
次に、トリムのズレ。
コレをなおしたら大分楽にはなったのですが、
やっぱ、舵の残るハッキリとしたセンターの出ないラダー操作で操作が忙しい感じ。
あとは、慣れもありますね。
+++++++++++++++++++++++++
舵の残りを引きずってるので、これを排除しようと、
スプリング内部にボールペンの芯の軸をはめ込み
スーパーXGでモールドする感じで固定。
かなり改善されました。
動かして見ると、ラダーとスロットル以外は、
最大舵角が小さい。
よって、キャリブレーションすれば良い気もしますが、
紛らわしいことになるので、操舵のD/Rウェイト値を125%にしました。
+++++++++++++++++++++++++
で、扱いやすいマイクロクワッドE010にて、
実際の室内飛行。
まず、前後のスライドでは、
スロットルの方向性が直観的につかみにくい。
よって、上下が安定しない。
ラダーは慣れが必要な上に、舵が残りセンターがハッキリしないのでヨー軸も安定しない。
よって、操縦しにくいです。
トリムのズレもあります。
これらに対応できれば、とても扱いやすくなるはず。(多分プロポよりも)
ラダーは、フレキシブルジョイント的部分のねじれが若干残ります。
EXPを45にしてセンターズレに鈍感にして目立たなくしました。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
次に、FPV+HMDでやってみました。。
楽になると思ってたのに、驚くほど飛ばせない。
プロポなら数分はOkなハズなのに、飛行時間十数秒が良いとこ。
まず、やっぱ、上下動が問題。
次に、トリムのズレ。
コレをなおしたら大分楽にはなったのですが、
やっぱ、舵の残るハッキリとしたセンターの出ないラダー操作で操作が忙しい感じ。
あとは、慣れもありますね。
+++++++++++++++++++++++++
舵の残りを引きずってるので、これを排除しようと、
スプリング内部にボールペンの芯の軸をはめ込み
スーパーXGでモールドする感じで固定。
かなり改善されました。
 これで、FPVでの滞空時間は、持って20秒ちょいと言う感じ。
最大のムズい所は、スロットル操作による上下動が直観的じゃ無いコト。
次に、エルロンを動かすとラダーも回してしまう感じ、やっぱ強いセンターリターンが出てないことですね。
あとは、
センターリターン用のゴムですね、モビロンバンドというポリウレタンゴムに換装です。
瞬間接着剤で0.4mm厚のを二枚重ねで使用しました。
これで、FPVでの滞空時間は、持って20秒ちょいと言う感じ。
最大のムズい所は、スロットル操作による上下動が直観的じゃ無いコト。
次に、エルロンを動かすとラダーも回してしまう感じ、やっぱ強いセンターリターンが出てないことですね。
あとは、
センターリターン用のゴムですね、モビロンバンドというポリウレタンゴムに換装です。
瞬間接着剤で0.4mm厚のを二枚重ねで使用しました。
 伸びがあまり良くないので、かなり操作感が改善しました。
瞬着は、プライマー付きのプラスチック用アロンアルファーが良いかもです。
あとは、
上下動のコントロールを直観的にしたいのと、
エルロン、エレベーターの最大舵角を稼ぎながら、
センターは精密にクッキリと出るようにしたいトコです。
ラダーは、ツイストの場合、
小さな操舵でも機敏に反応して欲しいとこもありますが、
遊びというかデッドゾーンもある程度多めに必要そうですね。
ココは、電子的には難しいので、機械的に作る?
まあ、
ラダーは制御が入ってますし、
エルロン、エレベーターのように風でセンターが変わることも少なそうなので特にセンターが強いのは良いのではないでしょうか?。
+++++++++++++++++++++++++
ココまで来て、思ったのですが、
ホール素子な角度センサーを使用しようか迷ったのですが、
気がつきました。
それって電源が必要ですね。
しかも、駆動には10mAとか、結構に電気食います。
なら、フツーにVRのアクティブ回路にして、その代わり、
小型で小電力に作って、
プロポのポテンショメータへの供給電力にて回路を駆動させれば良いかな?と思いました。
5Vなら、USB電源も同じで、
ジョイパッドに繋ぐという用途にも使えるはずです。←XBoxはアナログコントローラーへの給電は3.3Vのも。
(ジョイパッドの場合、A/D変換のBit数などは少ないかも。)
伸びがあまり良くないので、かなり操作感が改善しました。
瞬着は、プライマー付きのプラスチック用アロンアルファーが良いかもです。
あとは、
上下動のコントロールを直観的にしたいのと、
エルロン、エレベーターの最大舵角を稼ぎながら、
センターは精密にクッキリと出るようにしたいトコです。
ラダーは、ツイストの場合、
小さな操舵でも機敏に反応して欲しいとこもありますが、
遊びというかデッドゾーンもある程度多めに必要そうですね。
ココは、電子的には難しいので、機械的に作る?
まあ、
ラダーは制御が入ってますし、
エルロン、エレベーターのように風でセンターが変わることも少なそうなので特にセンターが強いのは良いのではないでしょうか?。
+++++++++++++++++++++++++
ココまで来て、思ったのですが、
ホール素子な角度センサーを使用しようか迷ったのですが、
気がつきました。
それって電源が必要ですね。
しかも、駆動には10mAとか、結構に電気食います。
なら、フツーにVRのアクティブ回路にして、その代わり、
小型で小電力に作って、
プロポのポテンショメータへの供給電力にて回路を駆動させれば良いかな?と思いました。
5Vなら、USB電源も同じで、
ジョイパッドに繋ぐという用途にも使えるはずです。←XBoxはアナログコントローラーへの給電は3.3Vのも。
(ジョイパッドの場合、A/D変換のBit数などは少ないかも。)

 しかも、回転式ポテンショメーターでヘリのコレクティブレバーのような感じに出来るので、ミニチュア版をスティックの筐体に付けてやってみようと思います。
コマンチのように操縦桿を上に引っ張ると上昇、下に押すと下降という操縦桿が上下にスライドするのは…、多分混乱しそう。
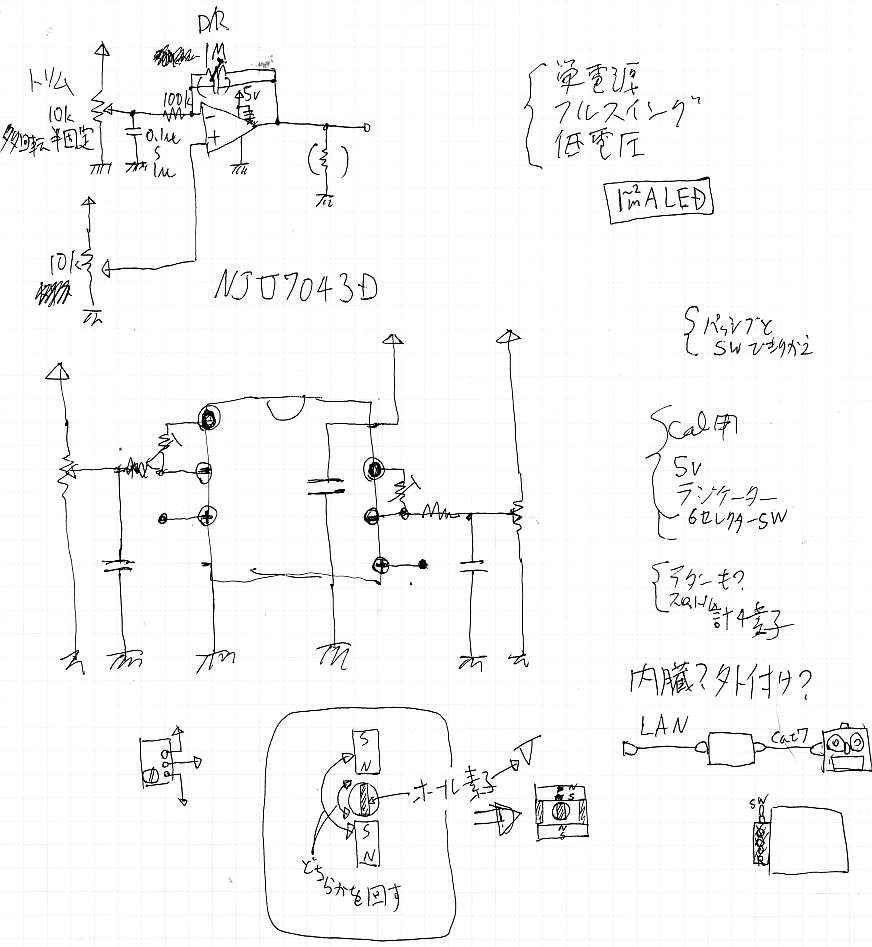
OP-AMPは、小電力、低電圧、フルスイングで単電源なモノを使用すれば行けると思います。
なので、
原点に戻りそうです。
ってか、回路の部品は、もう準備してます。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
もう一つ実験ブツが届きました。
特価で5000円でした。
しかも、回転式ポテンショメーターでヘリのコレクティブレバーのような感じに出来るので、ミニチュア版をスティックの筐体に付けてやってみようと思います。
コマンチのように操縦桿を上に引っ張ると上昇、下に押すと下降という操縦桿が上下にスライドするのは…、多分混乱しそう。
OP-AMPは、小電力、低電圧、フルスイングで単電源なモノを使用すれば行けると思います。
なので、
原点に戻りそうです。
ってか、回路の部品は、もう準備してます。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
もう一つ実験ブツが届きました。
特価で5000円でした。
 結構狭角なコントロールですが、
ネットで分解図を見たとき、
VRの固定のガタがあるとかで、ソコは接着固定した方が良いと書いてありました。
余談ですが、
プロポや操縦桿にコンパス付けたら、
機体と同じ角度に出来そうですね。
ホームロックという感じより扱いやすい?
+++++++++++++++++++++++++
ホールセンサー式
追記>
アクティブ回路にするなら、自作ホール角度センサーにする手も。
使うなら、リニアに電圧変換される。ホールセンサーA1324LUA−Tとかイイかも。(ただし消費電流が一個で6.5mA)
磁石は、薄くて平たいヤツにしてホール素子を挟む感じ。
狭角なら、Sinθ≒θでしイイかも。
それと、昔、
スロットルのレバーをコネクタで外せるようにしてたり
ハーフトリガー機構も仕込んであったりしたのですが、
高級品のHOTAS Warthogのスティックが同じ機構になってたりするのを確認。
結構狭角なコントロールですが、
ネットで分解図を見たとき、
VRの固定のガタがあるとかで、ソコは接着固定した方が良いと書いてありました。
余談ですが、
プロポや操縦桿にコンパス付けたら、
機体と同じ角度に出来そうですね。
ホームロックという感じより扱いやすい?
+++++++++++++++++++++++++
ホールセンサー式
追記>
アクティブ回路にするなら、自作ホール角度センサーにする手も。
使うなら、リニアに電圧変換される。ホールセンサーA1324LUA−Tとかイイかも。(ただし消費電流が一個で6.5mA)
磁石は、薄くて平たいヤツにしてホール素子を挟む感じ。
狭角なら、Sinθ≒θでしイイかも。
それと、昔、
スロットルのレバーをコネクタで外せるようにしてたり
ハーフトリガー機構も仕込んであったりしたのですが、
高級品のHOTAS Warthogのスティックが同じ機構になってたりするのを確認。
 ラダーペダルは至って簡素な設計でした。
ラダーペダルは至って簡素な設計でした。
 簡素のするには、案外結構頭を使うのですよね。
+++++++++++++++++++++++++
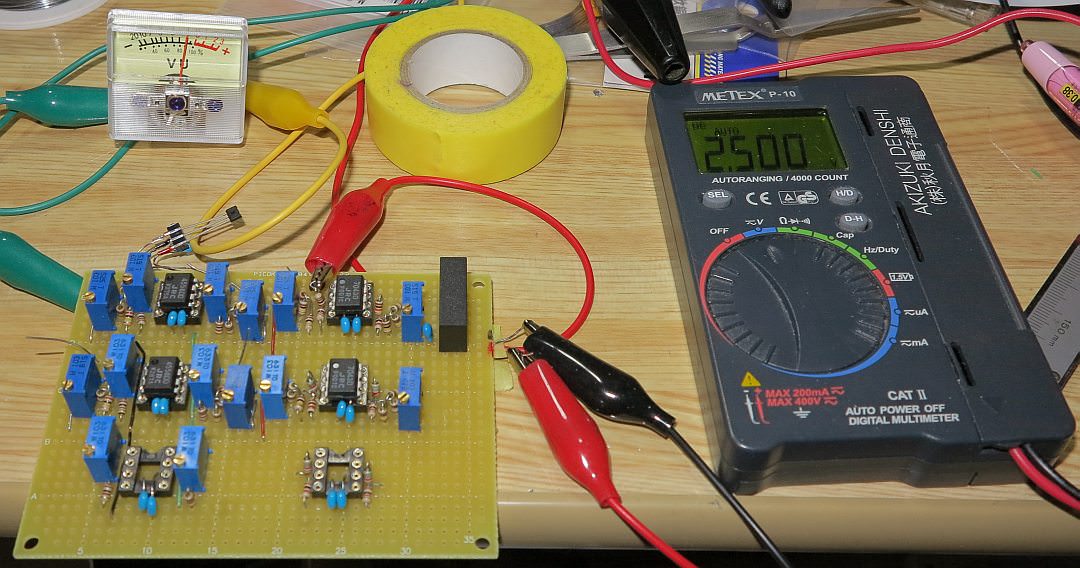
昔組んだアクティブコンバーター回路が見つかりました〜。
簡素のするには、案外結構頭を使うのですよね。
+++++++++++++++++++++++++
昔組んだアクティブコンバーター回路が見つかりました〜。
 おもったより便利に組んでます。
でも、コレでは+−電源が必要。
ということは、
単一の電源で動かすには絶縁された比較的精密なDC-DCコンバーターが必要で、電気も食うので、プロポのポテンショメーター印加電圧用の電源では不安。
よって、モトモト電流を食うホールセンサーを使う時などに使えれば有効という感じ。
割り切って使うなら、電流消費ををさほど気にせず、LEDやラジケータ-とかも多く使えますし。
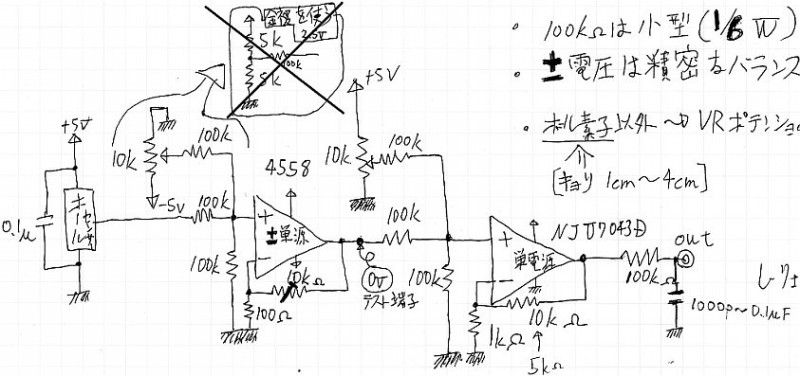
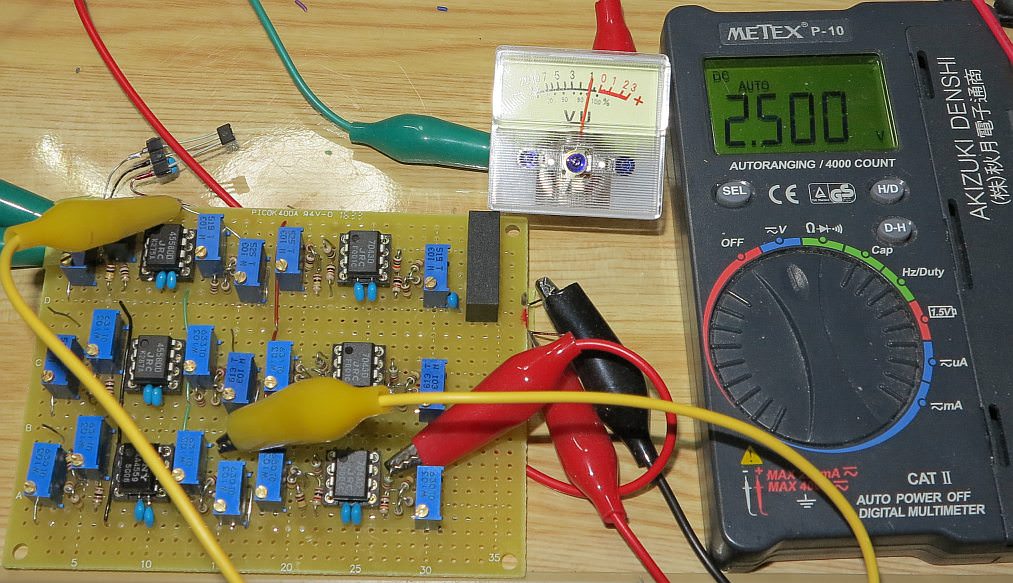
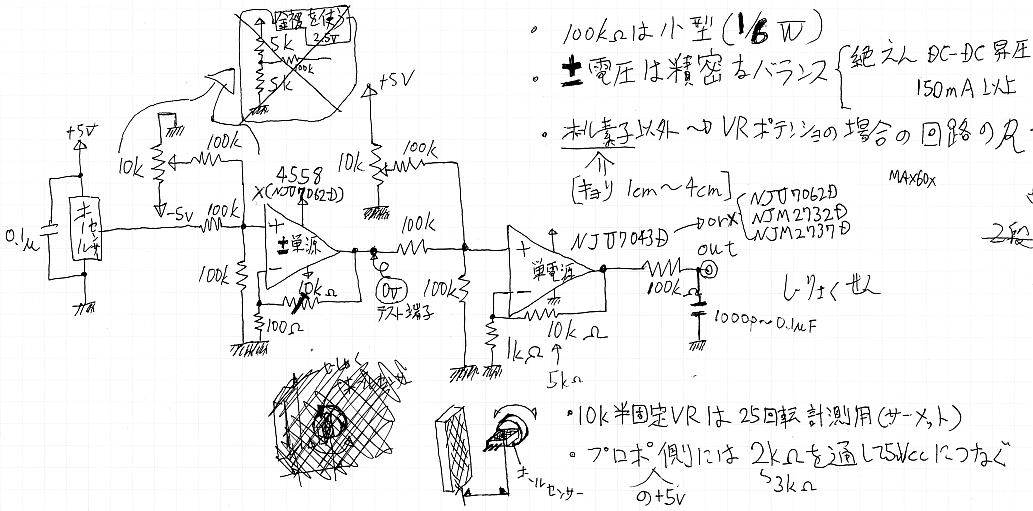
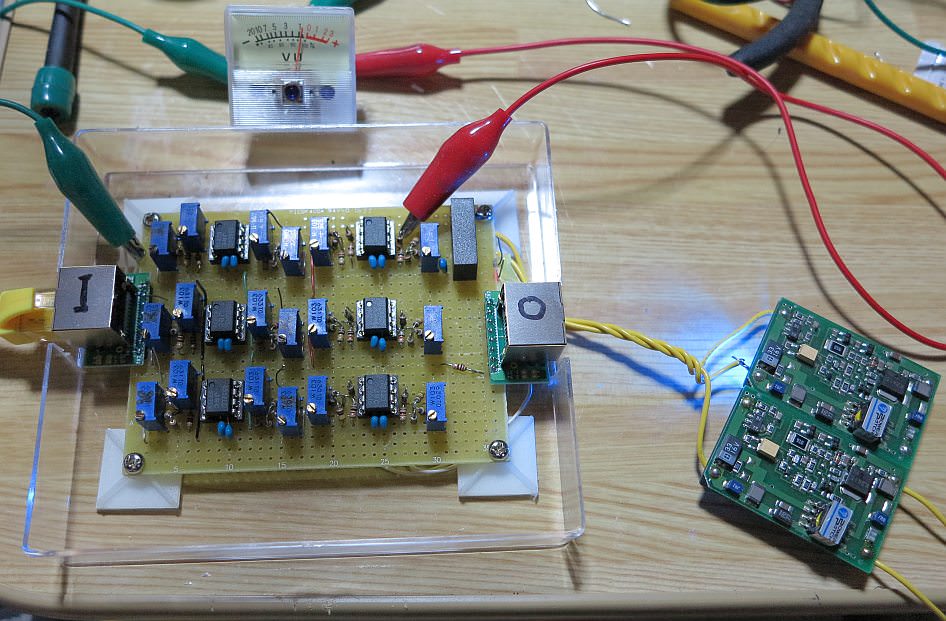
で、こちらが今回の回路の案。
キャリブレーションが手間ですが小電力で単電源が可能。
トリムを動かすとD/Rも再調整が必要でその逆も同じという感じですが、
一旦合わせればOkという場合には問題なし、
おもったより便利に組んでます。
でも、コレでは+−電源が必要。
ということは、
単一の電源で動かすには絶縁された比較的精密なDC-DCコンバーターが必要で、電気も食うので、プロポのポテンショメーター印加電圧用の電源では不安。
よって、モトモト電流を食うホールセンサーを使う時などに使えれば有効という感じ。
割り切って使うなら、電流消費ををさほど気にせず、LEDやラジケータ-とかも多く使えますし。
で、こちらが今回の回路の案。
キャリブレーションが手間ですが小電力で単電源が可能。
トリムを動かすとD/Rも再調整が必要でその逆も同じという感じですが、
一旦合わせればOkという場合には問題なし、
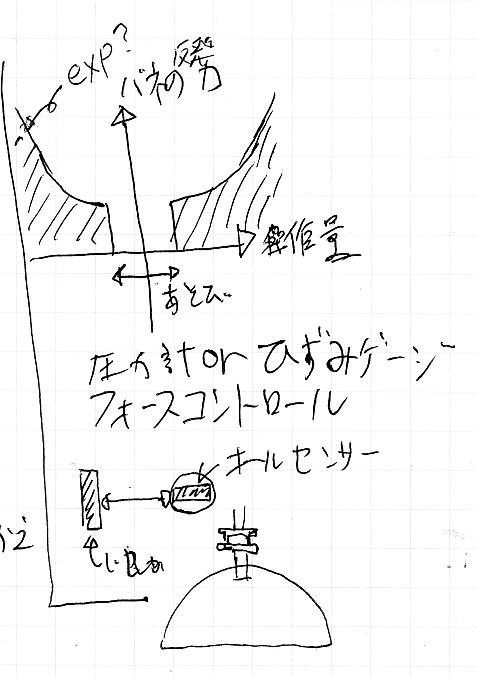
 で、スティックの操作感で最も重要なコトというかほぼ全てココがキモです、
それは、
操作に対して反発力のプロファイル。
そして、遊び、最大移動量、
柄の長さによる、平行移動と角度変位の比。
スティックの握りの前傾角度。←特にツイストに効いてくる。
F-16のようにスティックが殆ど動かないフォースコントロールというのもありますね。
圧力センサーか、歪みゲージと言うとこでしょうか。
で、スティックの操作感で最も重要なコトというかほぼ全てココがキモです、
それは、
操作に対して反発力のプロファイル。
そして、遊び、最大移動量、
柄の長さによる、平行移動と角度変位の比。
スティックの握りの前傾角度。←特にツイストに効いてくる。
F-16のようにスティックが殆ど動かないフォースコントロールというのもありますね。
圧力センサーか、歪みゲージと言うとこでしょうか。
 ホールセンサーは、
薄い磁石二枚で挟むか、
一個なら、ちょっと距離を付けた方が、安定すると思います。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
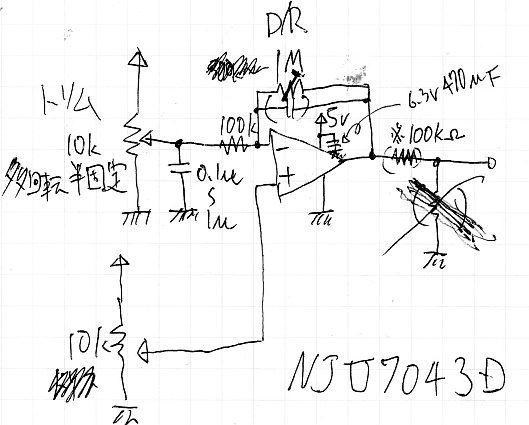
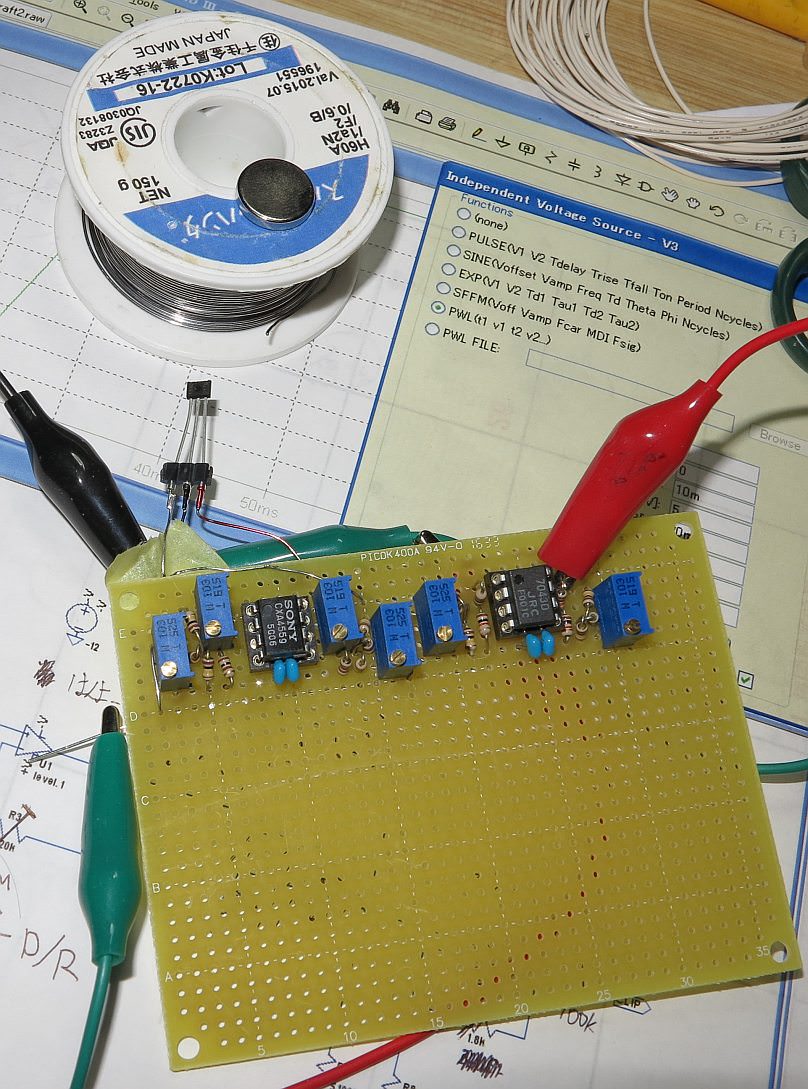
で、設計した回路を組んでみたトコ、
発振してるようです。
それによって、電源まで揺らいでるようで、
まずは、電源に6.3V470μFを付けましたが、
プロポに繋ぐ時一瞬大きめの電流が流れるので、保護回路が働きます。
なので、繋いでから電源ONになりました。
ホールセンサーは、
薄い磁石二枚で挟むか、
一個なら、ちょっと距離を付けた方が、安定すると思います。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
で、設計した回路を組んでみたトコ、
発振してるようです。
それによって、電源まで揺らいでるようで、
まずは、電源に6.3V470μFを付けましたが、
プロポに繋ぐ時一瞬大きめの電流が流れるので、保護回路が働きます。
なので、繋いでから電源ONになりました。
 で、発振は、他のOP-AMPでは生じなかったのですが、
NJU7043Dでは起こるという感じです。
しかし、このOP-AMPじゃないと出力がフルスイングにならないので、
対処をしたです。
原因は、ケーブルによる容量性負荷と言う感じです。
よって、※印の100KΩを出力に繋ぎましたところ、綺麗に収まりました。
ちょっと電気を食いますが、LEDを付けました。
青色LED使用、ロード抵抗は1KΩで電流は2mA以下になります。
で、発振は、他のOP-AMPでは生じなかったのですが、
NJU7043Dでは起こるという感じです。
しかし、このOP-AMPじゃないと出力がフルスイングにならないので、
対処をしたです。
原因は、ケーブルによる容量性負荷と言う感じです。
よって、※印の100KΩを出力に繋ぎましたところ、綺麗に収まりました。
ちょっと電気を食いますが、LEDを付けました。
青色LED使用、ロード抵抗は1KΩで電流は2mA以下になります。
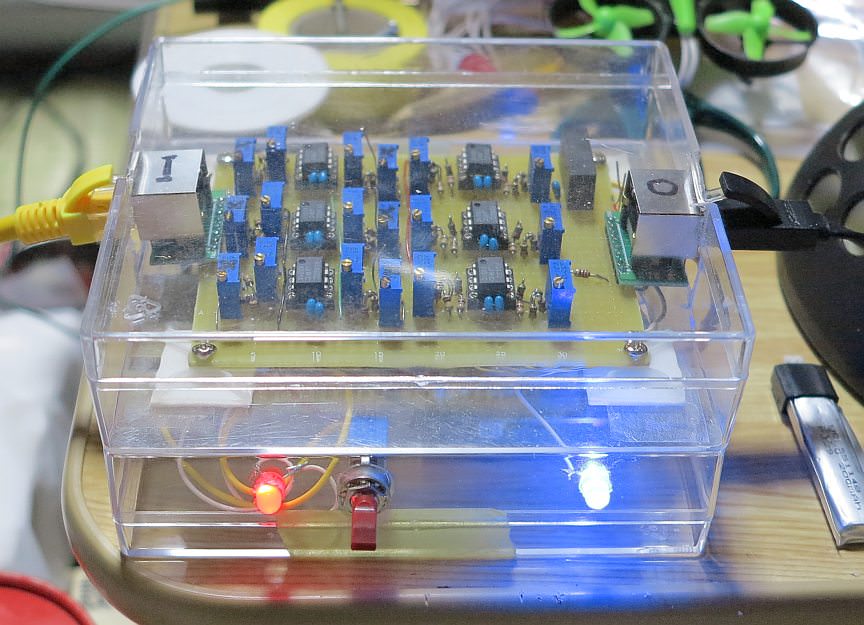
 飛ばしてみたトコ、難易度は少し上がった感もありますが、
最大舵角が広くなったので、運動性が上がりました。
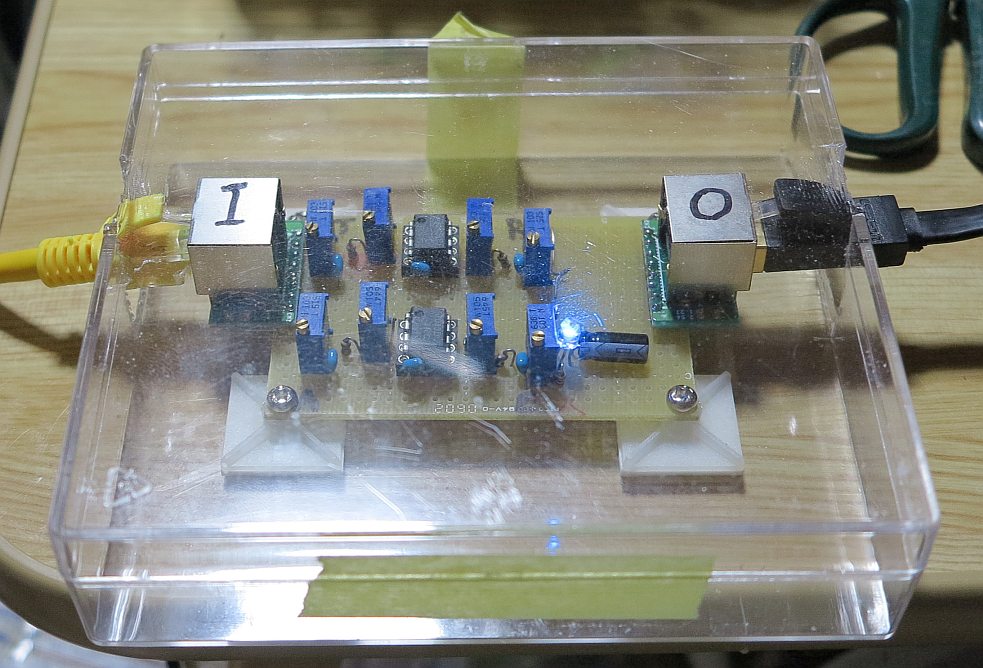
ポリカーボネートケースに入れました、
飛ばしてみたトコ、難易度は少し上がった感もありますが、
最大舵角が広くなったので、運動性が上がりました。
ポリカーボネートケースに入れました、
 ラジケータ−による可視化、スルーSWは省略です。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
で、ホール素子用、アクティブ回路をデラックスにつくろうかなー?
と思ています。
その場合は別電源を必要としますが、
1.2Vニッケル水素電池一個などから、
絶縁DC-DCインバーター昇圧モジュール等を使用し
扱いはシンプルにしたいと思います。
ラジケータ−による可視化、スルーSWは省略です。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
で、ホール素子用、アクティブ回路をデラックスにつくろうかなー?
と思ています。
その場合は別電源を必要としますが、
1.2Vニッケル水素電池一個などから、
絶縁DC-DCインバーター昇圧モジュール等を使用し
扱いはシンプルにしたいと思います。
 +++++++++++++++++++++++++
操縦桿の
角度センサーをホール素子のセンサーにすることを考えます。
見かけるタイプは磁石を回したり平行移動させるのが通常のようですが、
こちらはセンサー側を回します。
ジョイスティックの角度は、傾斜角15〜20°(つまり、+20°−20°)
Sinθ≒θな近似で行きます。
で、出力電圧は、というと、
強い磁石で
距離を近づければ、フル出力(5Vの90%)に出来るので、
そのまま繋いでも事足りるわけで良いのですが、
多分、強さの調節がシビアで
軸のガタなどが影響する部分もありそうです。
大きな磁石で挟み込めば比較的良いのかも知れませんがめんどいです。
かといって、ずれにくい構造や精密につくるのも。
ただし、離れすぎると、回路側の精度等の問題が出てきます。
なので、ちょっと離れてたほうがイイかもとも思い、
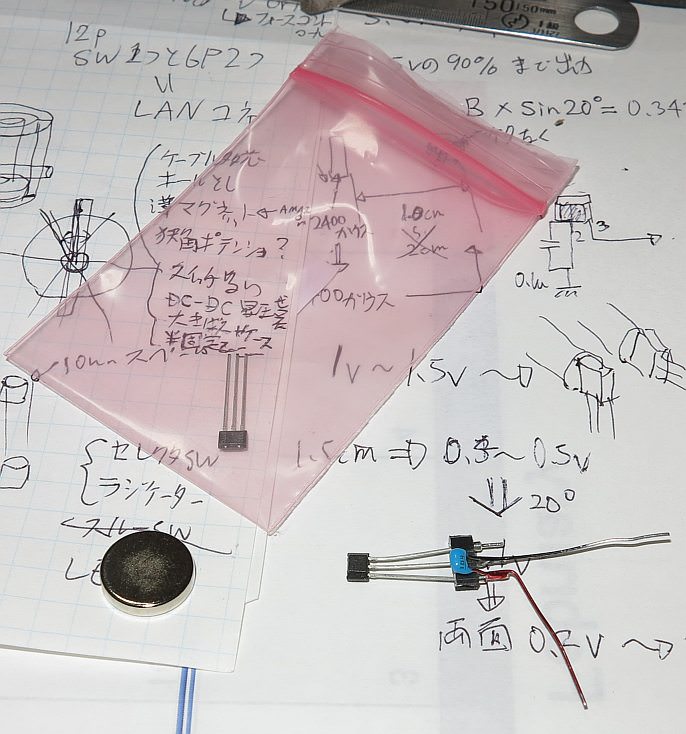
1.5〜2cm離して使うことを考えます。
なので、AMPの増幅が必要で、その倍率を、
センサー感度は、5.0mV/Gaussの感度なのですが…、
とりあえず、実測。
2700ガウスと書いてあるφ1cm位のネオジウムマグネット。
1.5cmでセンサーに対面状態にて0.3〜0.5V(←値は距離に激しく変動。)
Sin20°=0.342となると、0.1Vでして、
+-に動かすので、0.2Vの電圧差が出る感じです。
+++++++++++++++++++++++++
操縦桿の
角度センサーをホール素子のセンサーにすることを考えます。
見かけるタイプは磁石を回したり平行移動させるのが通常のようですが、
こちらはセンサー側を回します。
ジョイスティックの角度は、傾斜角15〜20°(つまり、+20°−20°)
Sinθ≒θな近似で行きます。
で、出力電圧は、というと、
強い磁石で
距離を近づければ、フル出力(5Vの90%)に出来るので、
そのまま繋いでも事足りるわけで良いのですが、
多分、強さの調節がシビアで
軸のガタなどが影響する部分もありそうです。
大きな磁石で挟み込めば比較的良いのかも知れませんがめんどいです。
かといって、ずれにくい構造や精密につくるのも。
ただし、離れすぎると、回路側の精度等の問題が出てきます。
なので、ちょっと離れてたほうがイイかもとも思い、
1.5〜2cm離して使うことを考えます。
なので、AMPの増幅が必要で、その倍率を、
センサー感度は、5.0mV/Gaussの感度なのですが…、
とりあえず、実測。
2700ガウスと書いてあるφ1cm位のネオジウムマグネット。
1.5cmでセンサーに対面状態にて0.3〜0.5V(←値は距離に激しく変動。)
Sin20°=0.342となると、0.1Vでして、
+-に動かすので、0.2Vの電圧差が出る感じです。
 これで、必要な増幅は25倍。
余裕を見ると30倍ですが、
スティックの最大傾斜角を15°に設計したり、2cm近く離す必要が出たりするかも。
で、90倍くらいにしようかと。
でも、
入力にそのまま0〜5Vが来た場合の最低感度も設定できるよう考えねば…。
結局?0.5〜60倍程度に設計。
これで、必要な増幅は25倍。
余裕を見ると30倍ですが、
スティックの最大傾斜角を15°に設計したり、2cm近く離す必要が出たりするかも。
で、90倍くらいにしようかと。
でも、
入力にそのまま0〜5Vが来た場合の最低感度も設定できるよう考えねば…。
結局?0.5〜60倍程度に設計。
 一組の回路を組んでみて、結構大変な感じもしました、、、、
一組の回路を組んでみて、結構大変な感じもしました、、、、
 電源は、絶縁型DC-DCインバーター昇圧タイプ。
と思ったのですが、全部をやってくれるのは安価なモノには無かったです。
なので、昇圧する回路と、+−5V絶縁インバーターは別々になるかと思います。
+の電圧を−で打ち消すので、
+−それぞれの電源が精密にバランスしてることが望ましいです。
ここまで組んで、100KΩが足らなくなりました。
電源は、絶縁型DC-DCインバーター昇圧タイプ。
と思ったのですが、全部をやってくれるのは安価なモノには無かったです。
なので、昇圧する回路と、+−5V絶縁インバーターは別々になるかと思います。
+の電圧を−で打ち消すので、
+−それぞれの電源が精密にバランスしてることが望ましいです。
ここまで組んで、100KΩが足らなくなりました。
 ラジケータ-で見る限り、このインバーター(基板右上の黒いの)に入れる電圧さえ正確でアルなら、多分Okという感じです。
ラジケータ-で見る限り、このインバーター(基板右上の黒いの)に入れる電圧さえ正確でアルなら、多分Okという感じです。
 +++++++++++++++++++++++++
安くても2.5万するみたいですが、
ジャンク扱いのを8250円で落札。
ジョイスティックの出品は、兵庫、大阪がめっぽう多いです。←殆ど?
ナゼでしょうね。
届いたのは、
表面のゴム塗装などに死に化粧といわれるアーマオールっぽいのを使った香りがしましたが、
CRCのラバープロテクタントの方が良いと思いました。
パネル文字が緑色に光ってます。
そして、スティックもレバーもデカい。←指が届きづらいほどにw
一応、A-10のを模したようです。
同様のHOTAS Warthogの方が金属パーツが多くて良いようですが、
高いし、ツイストなラダー機構は無いようですし、
スティックは、
ラダーとPOVスイッチの左下方向が不良とのこと。
で、とりあえず、治すことに、
写真は治療後のもの。見た目は変わらないですが、、、
+++++++++++++++++++++++++
安くても2.5万するみたいですが、
ジャンク扱いのを8250円で落札。
ジョイスティックの出品は、兵庫、大阪がめっぽう多いです。←殆ど?
ナゼでしょうね。
届いたのは、
表面のゴム塗装などに死に化粧といわれるアーマオールっぽいのを使った香りがしましたが、
CRCのラバープロテクタントの方が良いと思いました。
パネル文字が緑色に光ってます。
そして、スティックもレバーもデカい。←指が届きづらいほどにw
一応、A-10のを模したようです。
同様のHOTAS Warthogの方が金属パーツが多くて良いようですが、
高いし、ツイストなラダー機構は無いようですし、
スティックは、
ラダーとPOVスイッチの左下方向が不良とのこと。
で、とりあえず、治すことに、
写真は治療後のもの。見た目は変わらないですが、、、
 ラダーなツイスト部分は、接点復活剤と緩んでたネジを増し締め。
POVスイッチは接点不良を起こしてるため、更にこじって使用していたようで、
タクトスイッチなので、上下方向がへたっており、
接点復活剤を付けてぐりぐりする感じで復活しました。
がクリック感のヘタリはどうしようも無い。
総じて、タクトスイッチなのでストロークが浅くへたりやすい。
交換も出来ますが、モトモト構造上、寿命が短いスイッチですので…、
これは、改善すべきですね。
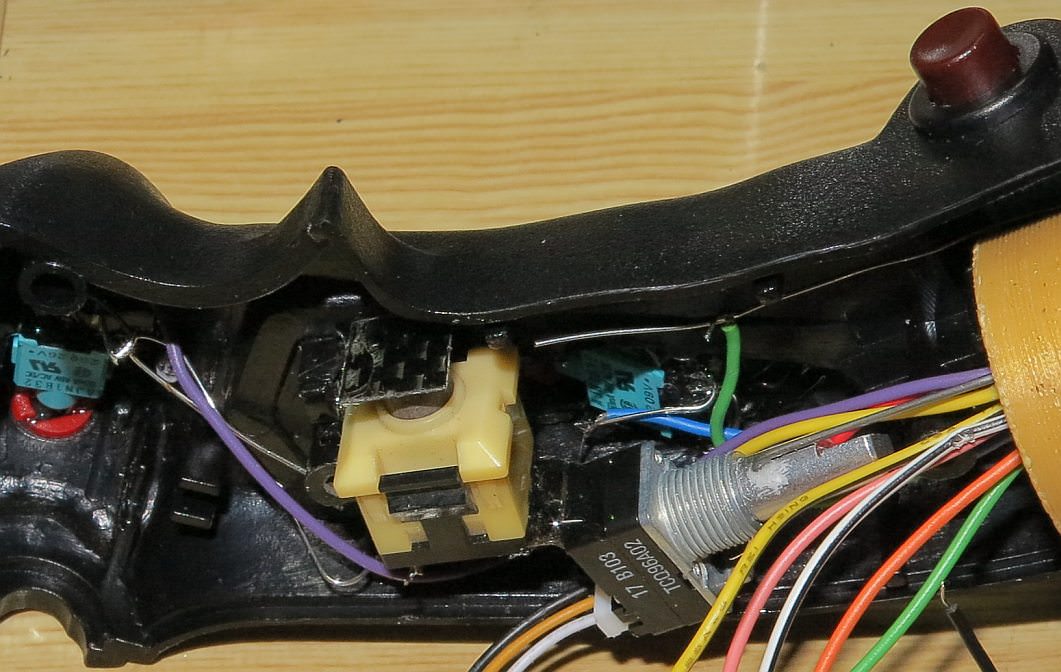
スロットルは、レバーに付いてる過半数のスイッチとポテンショメーターの接点不良とあったです。
分解してみると、とにかく断線が酷い状態でした。
どうも、これは、構造上の欠陥ですね。
ラダーなツイスト部分は、接点復活剤と緩んでたネジを増し締め。
POVスイッチは接点不良を起こしてるため、更にこじって使用していたようで、
タクトスイッチなので、上下方向がへたっており、
接点復活剤を付けてぐりぐりする感じで復活しました。
がクリック感のヘタリはどうしようも無い。
総じて、タクトスイッチなのでストロークが浅くへたりやすい。
交換も出来ますが、モトモト構造上、寿命が短いスイッチですので…、
これは、改善すべきですね。
スロットルは、レバーに付いてる過半数のスイッチとポテンショメーターの接点不良とあったです。
分解してみると、とにかく断線が酷い状態でした。
どうも、これは、構造上の欠陥ですね。
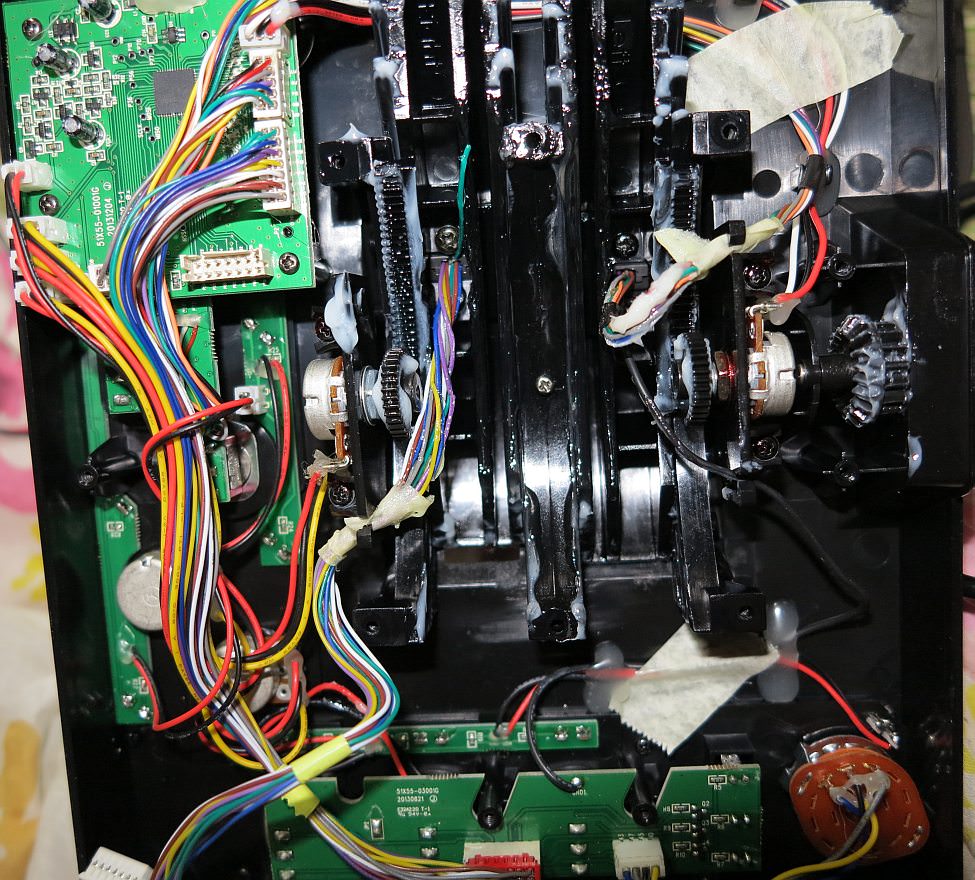

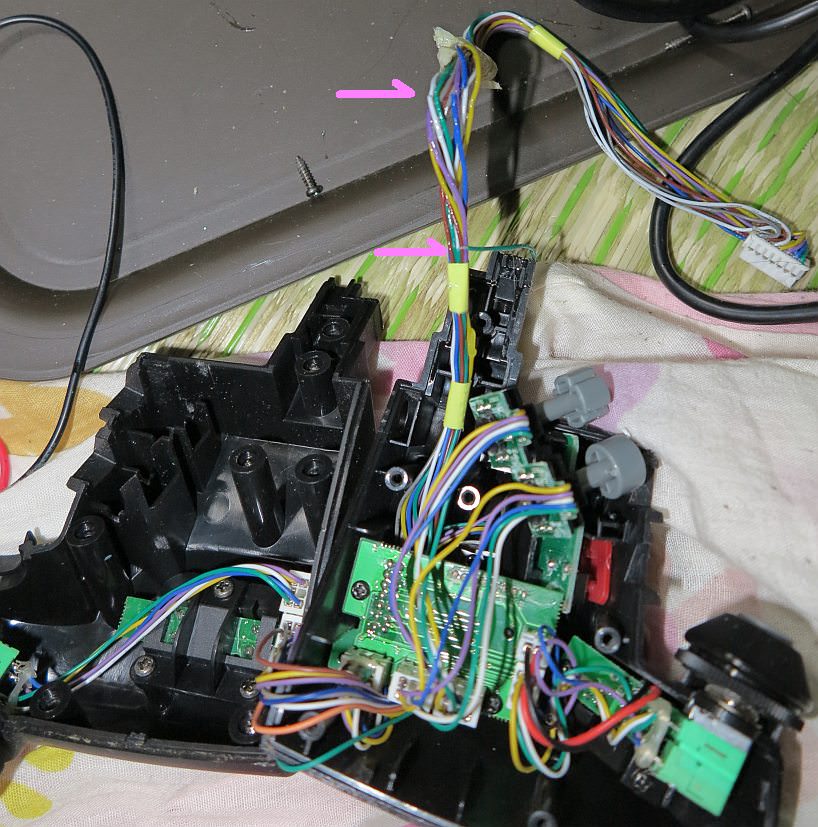 断線に影響する、ケーブルの当たるカド2箇所があって、そこを面取りします。
リケーブルし、当たるとこをテープを巻いて多少補強したいです。
オヤイデの極細8芯シールドを2本にする予定。
ロボットケーブル的なモノ。
と、思ったのですが、
オヤイデの発送が遅いので、間に合わせ?的にやることにしました。
ケーブルのコネクタは入と出が同じコネクタなのでこれをひっくり返し、
切れてるトコにAWG28のケーブルをあてがいちょっと延長するように半田付けすることに。
ハンダ付けした継ぎ目に絶縁テープを貼るため、グリスまみれのケーブルは中性洗剤で洗浄。
それにしても、使われてるコードの被服が弱いです
しかも、柔らかくも無い。
で、一応、治りました。
が、ケーブルが悪いので、
これは、また切れそうですね。
X55のスティックは、エルロン、エレバーターは、ホールセンサーなのですが、
見たところ、ドリキャスと同じ方式のようです。
可変抵抗ですが、ラダーでは50KΩ程度でした。
サウンドブラスター用のジョイスティックの文化の名残なのか、
約100KΩと高いのが多いです。
昔は供給電圧の分圧比を見てるのでは無かったため、センターズレも多かったような気がします。
高い値の可変抵抗は、ノイズに弱く加減算回路を組む上では不利かなーと思いました。
ジョイパッドは10KΩ程度も多いので、これはPSのコントローラー由来なのかも。
可変抵抗の最大の問題は摩耗なのかも?
このスティックは、
勿体ないし、スイッチが多すぎるしで、
とりあえず、PC専用
+++++++++++++++++++++++++
で、他に落札した素材を。
マイクロソフト サイドワインダー ジョイスティック:総額850円
断線に影響する、ケーブルの当たるカド2箇所があって、そこを面取りします。
リケーブルし、当たるとこをテープを巻いて多少補強したいです。
オヤイデの極細8芯シールドを2本にする予定。
ロボットケーブル的なモノ。
と、思ったのですが、
オヤイデの発送が遅いので、間に合わせ?的にやることにしました。
ケーブルのコネクタは入と出が同じコネクタなのでこれをひっくり返し、
切れてるトコにAWG28のケーブルをあてがいちょっと延長するように半田付けすることに。
ハンダ付けした継ぎ目に絶縁テープを貼るため、グリスまみれのケーブルは中性洗剤で洗浄。
それにしても、使われてるコードの被服が弱いです
しかも、柔らかくも無い。
で、一応、治りました。
が、ケーブルが悪いので、
これは、また切れそうですね。
X55のスティックは、エルロン、エレバーターは、ホールセンサーなのですが、
見たところ、ドリキャスと同じ方式のようです。
可変抵抗ですが、ラダーでは50KΩ程度でした。
サウンドブラスター用のジョイスティックの文化の名残なのか、
約100KΩと高いのが多いです。
昔は供給電圧の分圧比を見てるのでは無かったため、センターズレも多かったような気がします。
高い値の可変抵抗は、ノイズに弱く加減算回路を組む上では不利かなーと思いました。
ジョイパッドは10KΩ程度も多いので、これはPSのコントローラー由来なのかも。
可変抵抗の最大の問題は摩耗なのかも?
このスティックは、
勿体ないし、スイッチが多すぎるしで、
とりあえず、PC専用
+++++++++++++++++++++++++
で、他に落札した素材を。
マイクロソフト サイドワインダー ジョイスティック:総額850円
 驚くことにTUV規格パスです。←ウムラウト文字出ず。
最近のは、光学式なのでしょうか?
中に、小さな虫がわいたあとが…、
NEC PK-GP201 プレイスティック USB:総額2840円
驚くことにTUV規格パスです。←ウムラウト文字出ず。
最近のは、光学式なのでしょうか?
中に、小さな虫がわいたあとが…、
NEC PK-GP201 プレイスティック USB:総額2840円

 どうやら、
中身はスラストマスターFCSだったです。
USパテントがあります。
最新版に近いので、様々な修正、工夫がありました。
ギヤ機構は廃止されまして、スプリング圧も適当。
ゴムブーツがアリ、
操縦桿も細かな形状変更があります。
ゴム足は、接着剤では無く、はめ込み式でした。
整備しやすそうです。
耐久強度と精度と整備性が必要です。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
Dサブコネクタ、
GNDラインは、ステンレスワイヤー、
あと、ヘリは、スティックの軸が長い方がやりやすいようです。
(電子制御が入ってる、コマンチなどは短いようですが、、、)
とりあえず動く分には、
分解してUSBI/Fを廃し、RC専用にしたり、
ホール素子をつけるのも、もったいない気もしてるのですがw
スマートなサイドスティックではなく、
ヘリ専用な軸の長さはちょっと不格好な気も。
ツイスト機構は、RCにはシンプルで良いと思ってるのですが、
本来の扱いやすさからすると、ペダルがイイ感じも。
+++++++++++++++++++++++++
回路を改良。
どうやら、
中身はスラストマスターFCSだったです。
USパテントがあります。
最新版に近いので、様々な修正、工夫がありました。
ギヤ機構は廃止されまして、スプリング圧も適当。
ゴムブーツがアリ、
操縦桿も細かな形状変更があります。
ゴム足は、接着剤では無く、はめ込み式でした。
整備しやすそうです。
耐久強度と精度と整備性が必要です。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
Dサブコネクタ、
GNDラインは、ステンレスワイヤー、
あと、ヘリは、スティックの軸が長い方がやりやすいようです。
(電子制御が入ってる、コマンチなどは短いようですが、、、)
とりあえず動く分には、
分解してUSBI/Fを廃し、RC専用にしたり、
ホール素子をつけるのも、もったいない気もしてるのですがw
スマートなサイドスティックではなく、
ヘリ専用な軸の長さはちょっと不格好な気も。
ツイスト機構は、RCにはシンプルで良いと思ってるのですが、
本来の扱いやすさからすると、ペダルがイイ感じも。
+++++++++++++++++++++++++
回路を改良。
 ホールセンサーA1324LUA−T
ホールセンサーに磁石を近づけて、十分信号は出ることを確認。
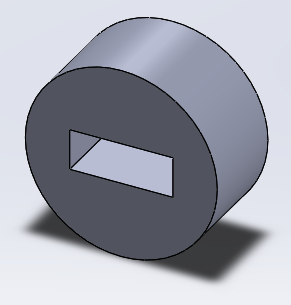
まず、磁石とセンサーの位置関係はかなりシビアですので。
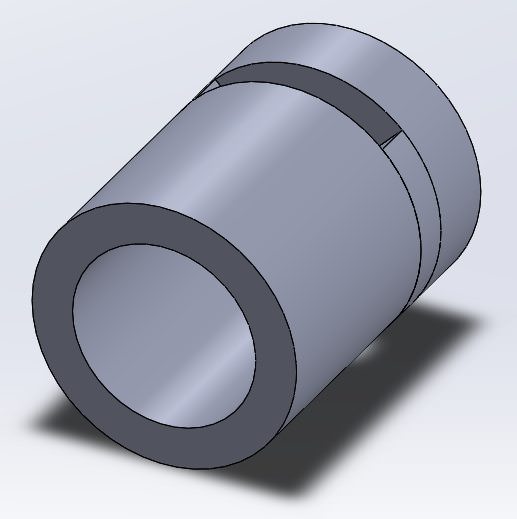
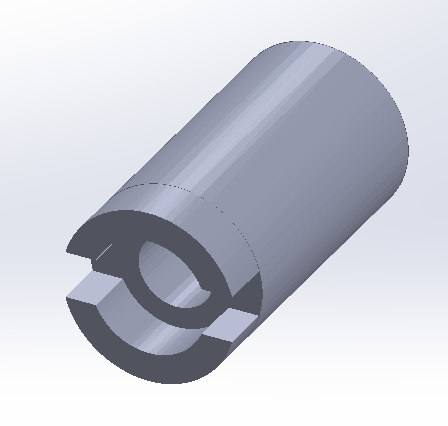
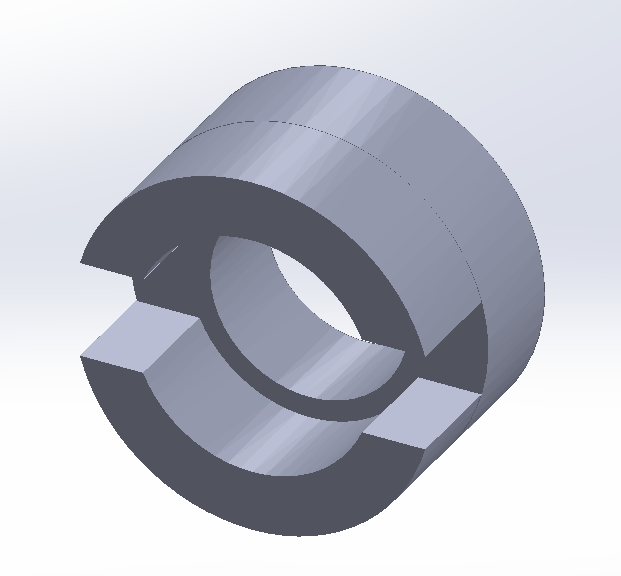
センサーを「精度の高い垂直」に立てた状態で固定するのに悩みました。
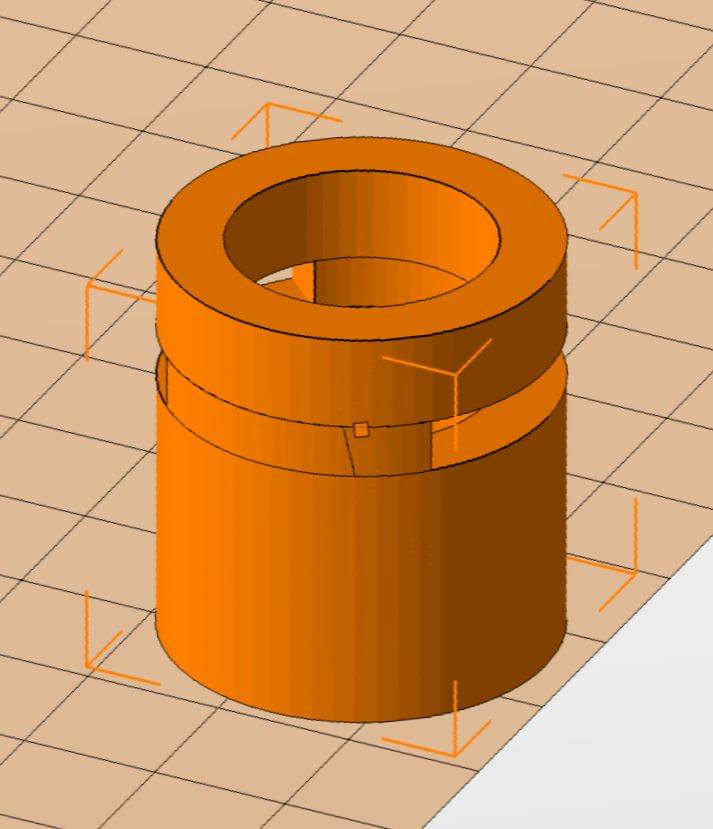
で、思いついたのが、円柱へのはめ込み型です。
AutoCADで平面図を造り、
SolidWorksで3Dの押し出し。
ホールセンサーA1324LUA−T
ホールセンサーに磁石を近づけて、十分信号は出ることを確認。
まず、磁石とセンサーの位置関係はかなりシビアですので。
センサーを「精度の高い垂直」に立てた状態で固定するのに悩みました。
で、思いついたのが、円柱へのはめ込み型です。
AutoCADで平面図を造り、
SolidWorksで3Dの押し出し。
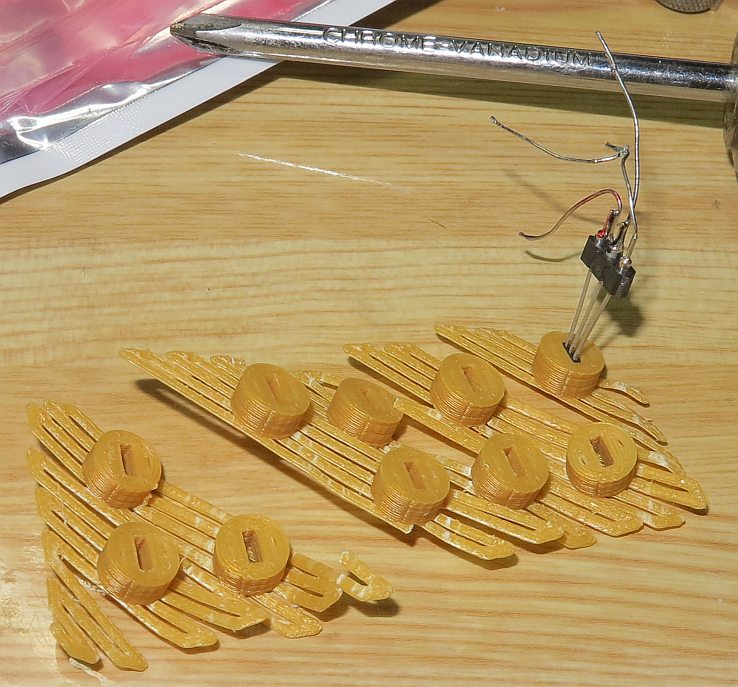
 これを、Simplifyで10個複製の配列。
これを、Simplifyで10個複製の配列。
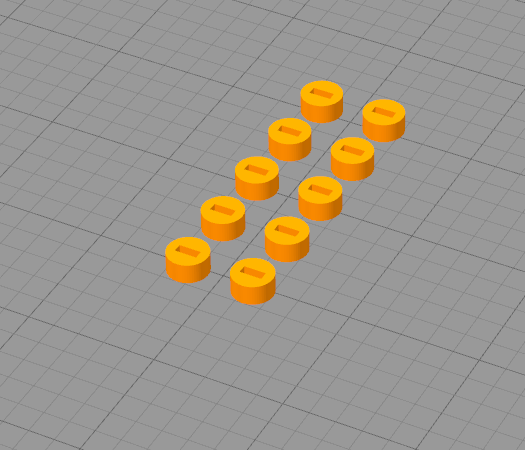 出来上がりました。
がラフトはとれないのでそのまま…。
出来上がりました。
がラフトはとれないのでそのまま…。
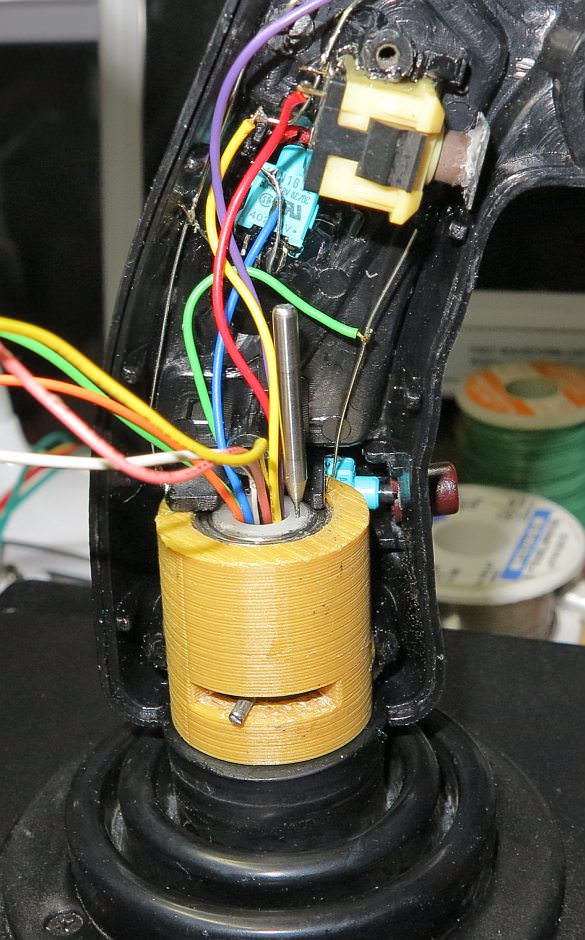
 軸部分を分解して
軸部分を分解して
 円柱を貼り付けます。
PP材かもなのでプラ用アロンアルファのプライマーを使用。
周りは、Suのソフトでくっつけて補強。
テフロンシリコーングリースを塗って組み込みます。
円柱を貼り付けます。
PP材かもなのでプラ用アロンアルファのプライマーを使用。
周りは、Suのソフトでくっつけて補強。
テフロンシリコーングリースを塗って組み込みます。
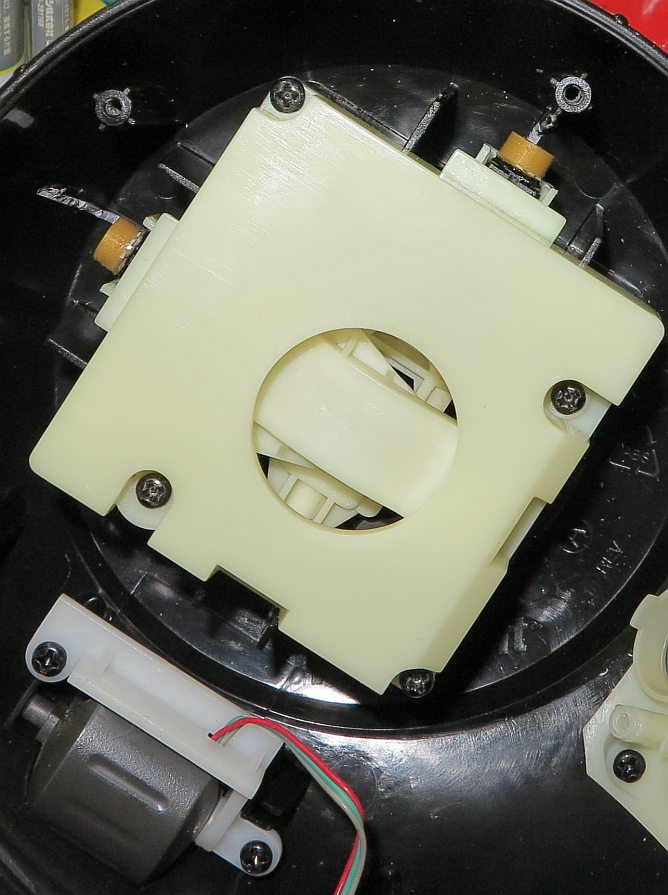 ケースの当たるプラ部分は、ペンチでもぎ取りました。
(素材のジョイスティックはMS.サイドワインダーです。)
ケースの当たるプラ部分は、ペンチでもぎ取りました。
(素材のジョイスティックはMS.サイドワインダーです。)
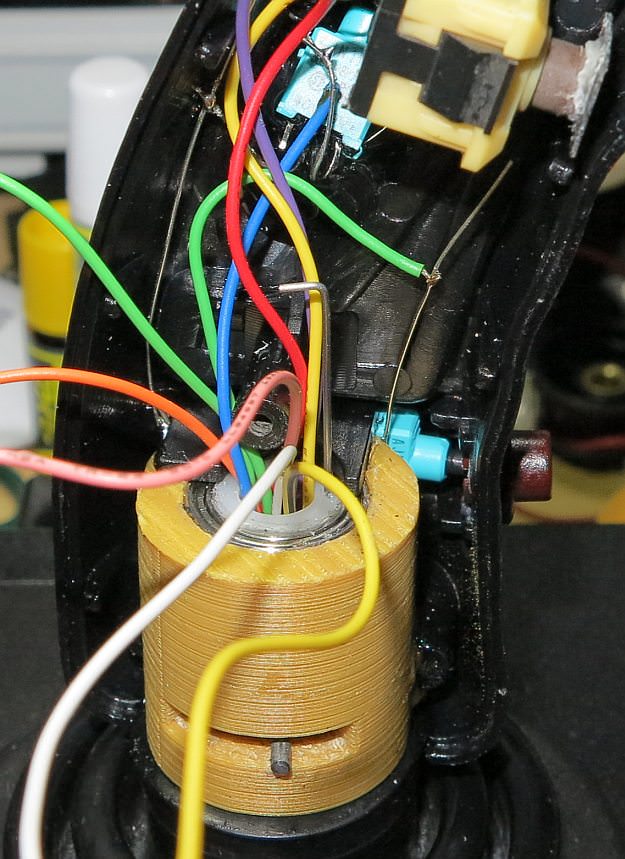
 センサーをはめ込み、磁石をくっつけますが、
出力電圧を見ながら、中心で上手くあうようにします。
出力信号の方向性は、磁石かセンサーを裏返せばOkです。
ICソケット使ってます。
外れが心配なら、ホットボンドなどで仮固定するとイイです。
センサーをはめ込み、磁石をくっつけますが、
出力電圧を見ながら、中心で上手くあうようにします。
出力信号の方向性は、磁石かセンサーを裏返せばOkです。
ICソケット使ってます。
外れが心配なら、ホットボンドなどで仮固定するとイイです。
 セットアップ画面。
まだ、ラダーが出来てないですが、
プロポのスティックモニタで、まともに動くことが確認出来ましたあ。
セットアップ画面。
まだ、ラダーが出来てないですが、
プロポのスティックモニタで、まともに動くことが確認出来ましたあ。
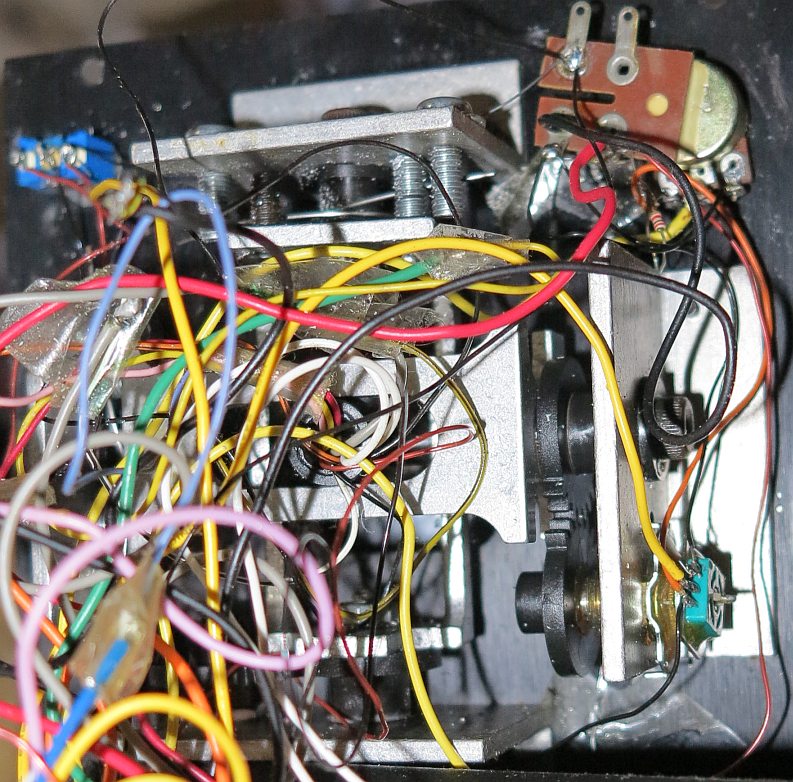
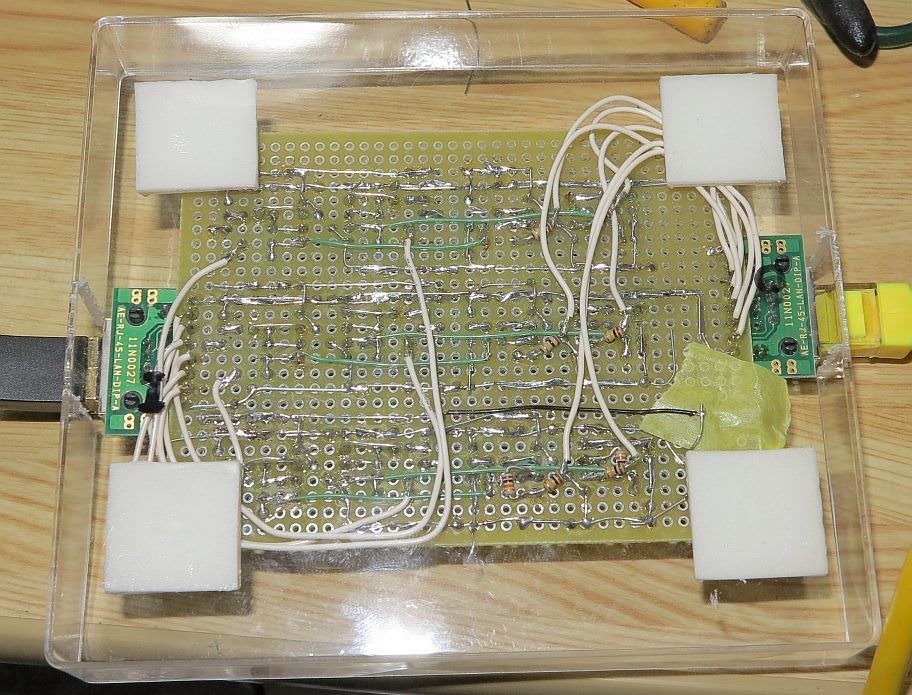
 裏面です。
ワイヤーは結構多いです。
ケースはアクリルのように割れない性質のポリカーボネートケースです。
基板の固定には、貼り付けボスを使用してみました。
裏面です。
ワイヤーは結構多いです。
ケースはアクリルのように割れない性質のポリカーボネートケースです。
基板の固定には、貼り付けボスを使用してみました。
 ここで、ちょっと問題を発見。
スロットルを動かすと、エルロン、エレベーターも少し動く。
理由は電源電圧の変動かな?
と思い、
電源を高精度で電流も稼げるモノに繋いでみました。
そうすると、治りました。
ここで、ちょっと問題を発見。
スロットルを動かすと、エルロン、エレベーターも少し動く。
理由は電源電圧の変動かな?
と思い、
電源を高精度で電流も稼げるモノに繋いでみました。
そうすると、治りました。
 なので、電源電圧変動が調整用VRの電源となってて、
感度を高めにしてる、ホールセンサーの入力調節部分に影響してしまうという感じでした。
ソコだけ直すなら、ツェナーDiを組み込むのでもイイ部分もありそうですが、
手間のかかった回路ですし、
思い切って、良い電源を使った方が精神衛生状良いのではないかな?
と思っております。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
あと、VRタイプならこのポテンショメーターがイイかと思いました。
200万サイクルで、今FCSに丁度に組み込んでるALPSのモノの倍の耐久性です。
なので、電源電圧変動が調整用VRの電源となってて、
感度を高めにしてる、ホールセンサーの入力調節部分に影響してしまうという感じでした。
ソコだけ直すなら、ツェナーDiを組み込むのでもイイ部分もありそうですが、
手間のかかった回路ですし、
思い切って、良い電源を使った方が精神衛生状良いのではないかな?
と思っております。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
あと、VRタイプならこのポテンショメーターがイイかと思いました。
200万サイクルで、今FCSに丁度に組み込んでるALPSのモノの倍の耐久性です。
 200万サイクルと言うと、1時間に200サイクル動かして、
飛行時間1万時間なので、完全に安心かというと、そうでも無いですね。
特にヘリは、サイクルが頻繁そうですし、
思ったのですが、
FCSなジョイスティックでも、1:1ギヤよりは、ボールリンケージの方が良さそうですね。
ただ、ギヤだと、「センサーが反応しない遊び」が作れるデスね。
あとは、FCSへの組み込みとか、
ラダーツイスト機構とか、
スティックのコネクター接続機構とか。…
スイッチング電源付けました。
200万サイクルと言うと、1時間に200サイクル動かして、
飛行時間1万時間なので、完全に安心かというと、そうでも無いですね。
特にヘリは、サイクルが頻繁そうですし、
思ったのですが、
FCSなジョイスティックでも、1:1ギヤよりは、ボールリンケージの方が良さそうですね。
ただ、ギヤだと、「センサーが反応しない遊び」が作れるデスね。
あとは、FCSへの組み込みとか、
ラダーツイスト機構とか、
スティックのコネクター接続機構とか。…
スイッチング電源付けました。
 ホール素子な角度センサー(ポテンショメーター)も売られてるのですが、
たしか、一番安くて緑測器の2000円だったです。
ホール素子な角度センサー(ポテンショメーター)も売られてるのですが、
たしか、一番安くて緑測器の2000円だったです。
 ただし、簡単に方向性の反転ができないのが難点。
+++++++++++++++++++++++++
+−電源は、たまたまウチにあったイーター電機のスイッチング電源二つで、
たしか、OEQ05-0512ですがちょっと高価なので、同一シリーズの0.5A出せて一つで+-出せるようなのが良いかと思いました。
で、回路の注意点など改変です。
候補にある「NJU7062D」は除外です。
ただし、簡単に方向性の反転ができないのが難点。
+++++++++++++++++++++++++
+−電源は、たまたまウチにあったイーター電機のスイッチング電源二つで、
たしか、OEQ05-0512ですがちょっと高価なので、同一シリーズの0.5A出せて一つで+-出せるようなのが良いかと思いました。
で、回路の注意点など改変です。
候補にある「NJU7062D」は除外です。
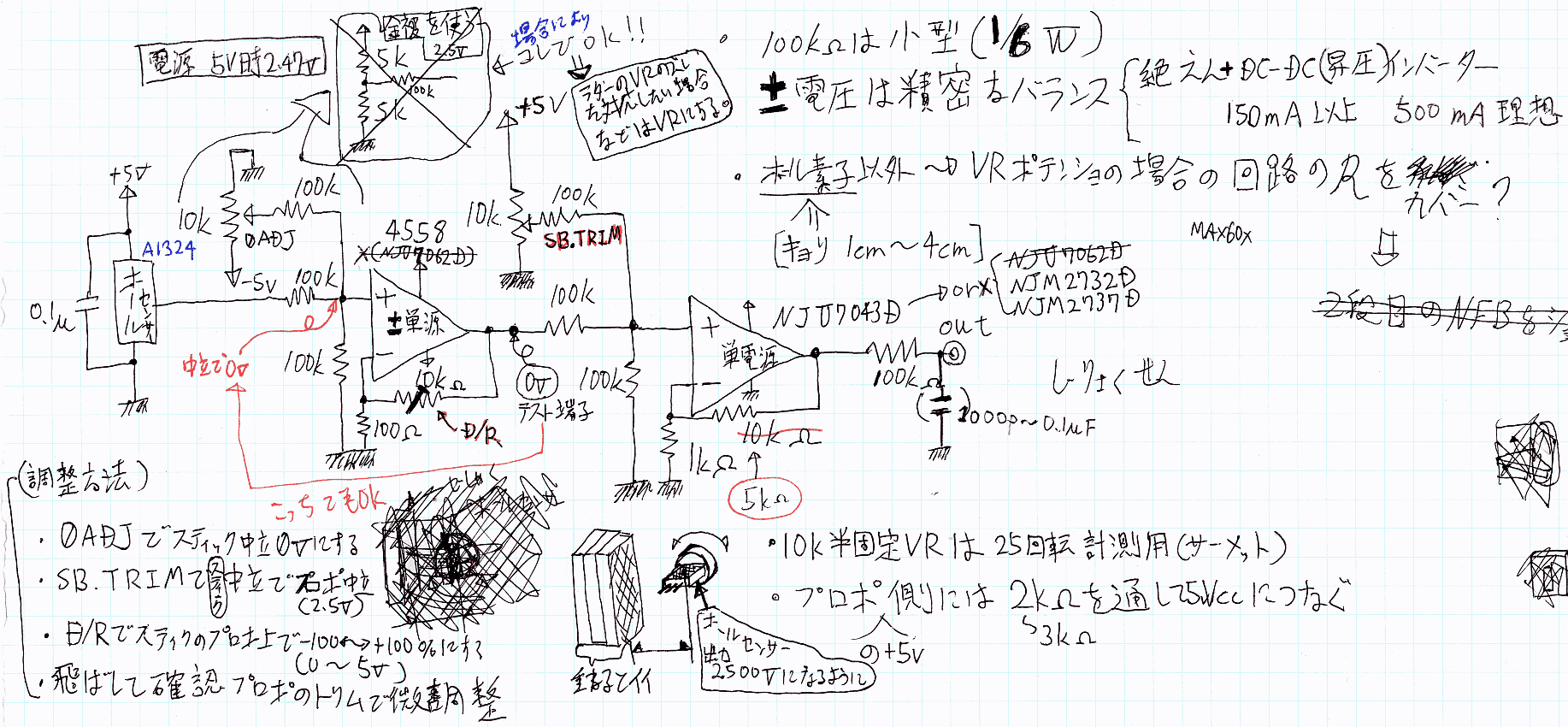
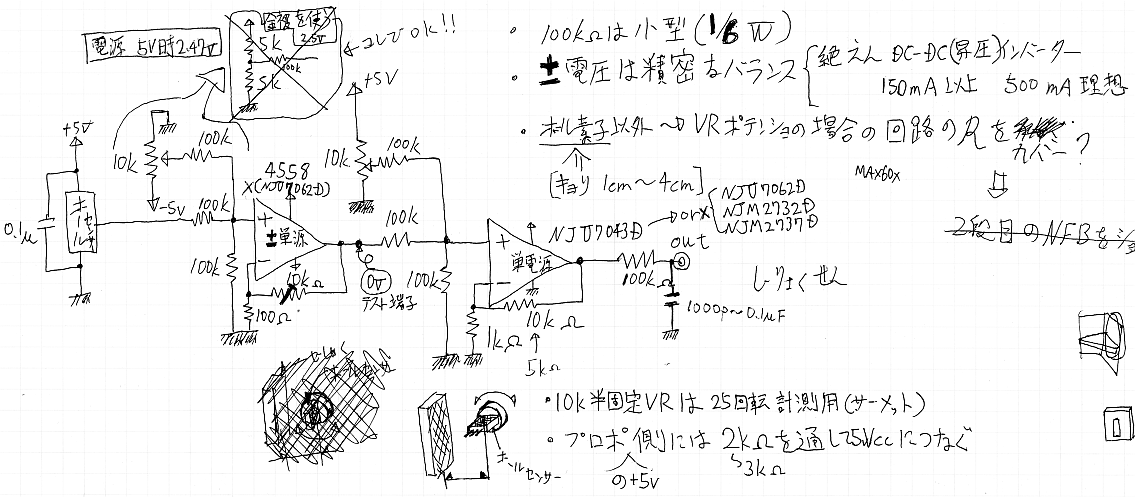 左上の10K半固定抵抗を、5Kの抵抗で分圧する図に×が付いてますが、
これでも、実用的にはOKなことが判明です。
抵抗は全て、1/6Wにすると一つの穴に3本まで足を差し込めるので、便利です。
金属皮膜だと更に良いですが、それほどシビアでもないようです。
左上の10K半固定抵抗を、5Kの抵抗で分圧する図に×が付いてますが、
これでも、実用的にはOKなことが判明です。
抵抗は全て、1/6Wにすると一つの穴に3本まで足を差し込めるので、便利です。
金属皮膜だと更に良いですが、それほどシビアでもないようです。
 マイクロソフトのサイドワインダーの筐体で、
スティックはツイスト機構のアル、Logicoolのフォースフィードバックから切り取りました。
これをニコイチするです。
ヘリは、スティックのシャフトが長い方が、細かいコントロールが楽なようです。
コマンチなど短いのフライバイワイヤで。電子姿勢制御で操作が簡素化されてる上に、感度や、EXPカーブの設定しているなどあるからです。
飛行機は、大胆な操作も必要なため、ある程度は短いようですね。
とりあえず、アドリブで、Dsubコネクタが付けられればいいや、
あとは、あとで考えようと思いました。
マイクロソフトのサイドワインダーの筐体で、
スティックはツイスト機構のアル、Logicoolのフォースフィードバックから切り取りました。
これをニコイチするです。
ヘリは、スティックのシャフトが長い方が、細かいコントロールが楽なようです。
コマンチなど短いのフライバイワイヤで。電子姿勢制御で操作が簡素化されてる上に、感度や、EXPカーブの設定しているなどあるからです。
飛行機は、大胆な操作も必要なため、ある程度は短いようですね。
とりあえず、アドリブで、Dsubコネクタが付けられればいいや、
あとは、あとで考えようと思いました。

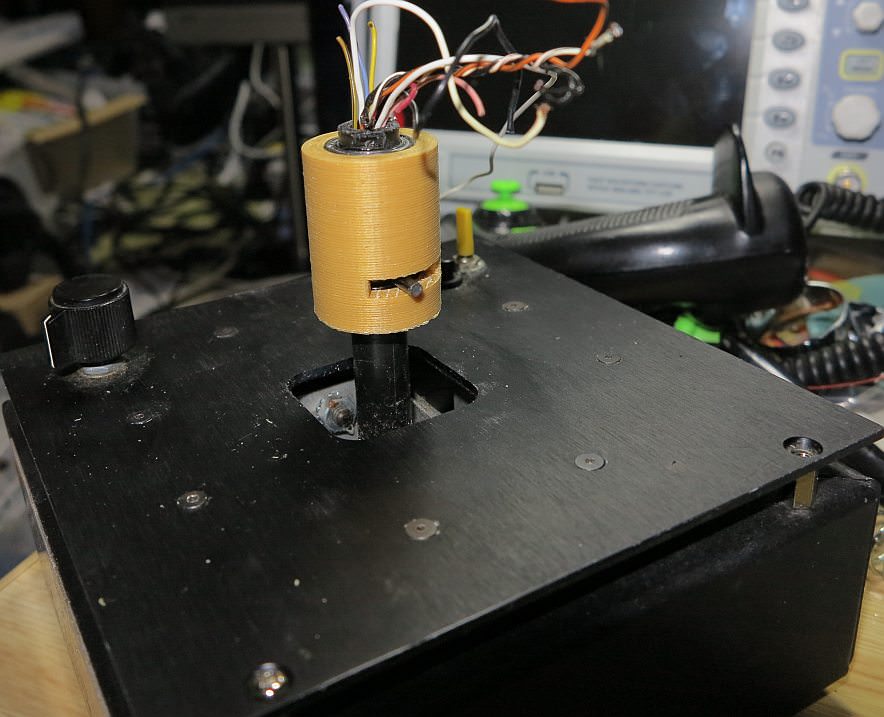
 でもって、フランジで固定すると楽そうだと思いました。
でもって、フランジで固定すると楽そうだと思いました。
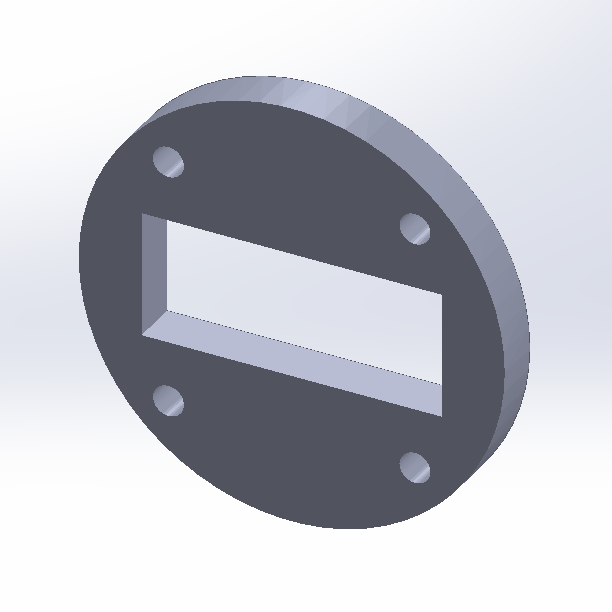 フランジは、円盤部分のみつくって、
瞬着でくっつけました。
耐衝撃用な4020で、難接着物用プライマーを塗りました。
強度はと言うと、…ありすぎるくらいです。
スティック根元が折れるまで、びくともしないでしょう。
フランジは、円盤部分のみつくって、
瞬着でくっつけました。
耐衝撃用な4020で、難接着物用プライマーを塗りました。
強度はと言うと、…ありすぎるくらいです。
スティック根元が折れるまで、びくともしないでしょう。

 フランジのDsubの横幅は多めに取りましたが、
少々熱収縮で狭すぎました。
よって、コネクタ側を曲げ加工。
で、くみ終わりました、
ラダーとスロットルは、可変抵抗の状態ですが、回路はホールセンサー用の回路を通して操作してます。
大抵のスティックも、ホール素子は、エルロンエレベータのみというのが、実際のようです。
この可変抵抗なラダーとスロットルな二つの舵は、あまり酷使しないですし、精密性も要求されにくいからだと思います。←特に固定翼機の場合。
フランジのDsubの横幅は多めに取りましたが、
少々熱収縮で狭すぎました。
よって、コネクタ側を曲げ加工。
で、くみ終わりました、
ラダーとスロットルは、可変抵抗の状態ですが、回路はホールセンサー用の回路を通して操作してます。
大抵のスティックも、ホール素子は、エルロンエレベータのみというのが、実際のようです。
この可変抵抗なラダーとスロットルな二つの舵は、あまり酷使しないですし、精密性も要求されにくいからだと思います。←特に固定翼機の場合。
 で、飛行テスト。
CX10でチェック。
。
とにかく、スロットルになれなければ、という感じで高度の維持が混乱するときがアリです。
まあ、スロットル操作が上下動に近くなったのですが位置が…、前のよりはすぐになれてマシになるかと思いますが、
ラダーの遊びが若干多いですね
遊びはメカニカルなモノで、センサーに遊びは無いため、少し舵が残ることもあるようです。まあ、問題を感じないです。
スティックは、長い方が、細かく操作でき、かなりイイ感じがします。
スマートとは言えず、かさばるのが難点ですね。
次は、E010
ラダー操作が残り、回るので、EXPを65にしたらかなり良くなりました。
長いスティックは操作が自然な感じで、かなり良いですね。
あとはスロットルがもうちょい直観的でマシだったら
あと、上に行くと首が苦しくなります。
で、次に、やっと、FPVです。
前後左右はまあまあだと思うのですが、それを考えてる暇が無いほど上下動がダメ。
まず、天井に当たって、次に、復帰できず床にぶつかる。それでおしまい。
ていう感じ。
スティックは上下だけど、粗すぎる操作しかできないのだと思います。
また、E010自体上下は重めで安定しないし、地面効果も強い。
極板のコンディションによって、何も操作しなくってもいきなり急上昇や急降下したりするので、
直観的で細かな操作も大きな操作もできるコレクティブスティックが必要そう。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
次は、
NECなFCSをどうにかしたいですが、
これは軸は、短くしたいです。
問題は、短いスティックのコネクタ、ラダーのツイスト機構ですね〜。
また、ホール素子を入れるなら、そのコトも考えねば…、
特に、ボリュームまわりに鉄が使われてる部分が気になります。
更に、ツイストなラダーにホール素子だと結構大変そう。
F-16のスティックやペダルは、フォースコントロールで、殆ど動かないらしいですが、
右足と左足にメカニカルなリンクが無いのなら、歪みゲージや、圧力センサーを左右の足に付ける。
というのもテですね。
で、左右の入力を引き算する。
一時期のコマンチのスロットル(コレクティブ)は操縦桿を上下させるのですが、
操作感は、どうなのでしょうね。
ラダーはツイストですし、右手に操作が完全に集中しますね。
コマンチでは、こんな感じのも
で、飛行テスト。
CX10でチェック。
。
とにかく、スロットルになれなければ、という感じで高度の維持が混乱するときがアリです。
まあ、スロットル操作が上下動に近くなったのですが位置が…、前のよりはすぐになれてマシになるかと思いますが、
ラダーの遊びが若干多いですね
遊びはメカニカルなモノで、センサーに遊びは無いため、少し舵が残ることもあるようです。まあ、問題を感じないです。
スティックは、長い方が、細かく操作でき、かなりイイ感じがします。
スマートとは言えず、かさばるのが難点ですね。
次は、E010
ラダー操作が残り、回るので、EXPを65にしたらかなり良くなりました。
長いスティックは操作が自然な感じで、かなり良いですね。
あとはスロットルがもうちょい直観的でマシだったら
あと、上に行くと首が苦しくなります。
で、次に、やっと、FPVです。
前後左右はまあまあだと思うのですが、それを考えてる暇が無いほど上下動がダメ。
まず、天井に当たって、次に、復帰できず床にぶつかる。それでおしまい。
ていう感じ。
スティックは上下だけど、粗すぎる操作しかできないのだと思います。
また、E010自体上下は重めで安定しないし、地面効果も強い。
極板のコンディションによって、何も操作しなくってもいきなり急上昇や急降下したりするので、
直観的で細かな操作も大きな操作もできるコレクティブスティックが必要そう。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
次は、
NECなFCSをどうにかしたいですが、
これは軸は、短くしたいです。
問題は、短いスティックのコネクタ、ラダーのツイスト機構ですね〜。
また、ホール素子を入れるなら、そのコトも考えねば…、
特に、ボリュームまわりに鉄が使われてる部分が気になります。
更に、ツイストなラダーにホール素子だと結構大変そう。
F-16のスティックやペダルは、フォースコントロールで、殆ど動かないらしいですが、
右足と左足にメカニカルなリンクが無いのなら、歪みゲージや、圧力センサーを左右の足に付ける。
というのもテですね。
で、左右の入力を引き算する。
一時期のコマンチのスロットル(コレクティブ)は操縦桿を上下させるのですが、
操作感は、どうなのでしょうね。
ラダーはツイストですし、右手に操作が完全に集中しますね。
コマンチでは、こんな感じのも
 http://www.metalcraftbyblair.com/index.php?main_page=index&products_id=13255&sort=20a&page=7
先進技術を積極的に入れて、
ヘルメットマウントディスプレーも結構変わっていったようですが、
もう開発生産はしてない機体ですね。
追記>
HMDを付けない飛行を続けてますが、
だんだん、飛行になれてきました。
上下動のコントロールががシビアですが、直観的にはあってる操作なので、それなりかな。
特に、放電容量の多い電池が安定につながります。
+++++++++++++++++++++++++
今、つくったジョイスティックの回路を電池で動かすことを考えてます。
プロポから電源をとっても良いですが、
ワイヤリングが増えるのもイヤですので。
乾電池を考えてるです。
(室内ならACアダプタで済みますが)
乾電池の電池容量は、体積に比例では無い。
小さいほど、エネルギー密度が高い。
例えば、単4に対し単3は倍程度しか容量が無い。
でも、コスパ考えたら、単3が一番のようですね。
昔、ソーラーカーの昇圧回路を扱って試作とかしてたときに、解ったことですが、
(昇圧じゃ無くって下げる時も原理は同じです。)
スイッチング電源は、コイルに磁束を貯め、半導体で入出を切り替えて、磁束から電流に替え、電圧が下がったらまた…、
を繰り返す比較的単純な回路なのですが、コイルや制御回路をよくしたりで効率が90パーセントを超えるモノもあります。
(Cに充電して直列にして放電する?という、チャージポンプ式?と言うのもアル)
ちなみに、DCプリントモーターなんてのを使ってたので、
スピードコントローラーはPWMで、矩形波を積分して三角波を出し、
コントローラーからの基準電圧とOP-AMPでコンパレートして、それでMOS-FETをスイッチングするだけです。
気にするのは、電流のメインストリートを太くするだけです。
で、話がそれましたが、
制作コストから、スイッチング電源二段重ねを用います。
初段のスイッチング電源で昇圧して、後段のスイッチング電源で±を出します。
でも、今使ってるイーター電機のスイッチング電源はあんま効率が良くないです。
スペックでは効率65パーセントはある思うのですが、±5V総合で50mA出すのに、入力に5V200mA食う…。
他のも、僅かなマイナス電源を出すだけで途端に効率が下がるモノが。
で、
初段は、秋月の
「昇圧型DC/DCコンバータ5〜25V可変出力電源モジュール組立キット」
にしようかと思っており、
効率90パーセント以上でリップルは100mVとまあまあ良好です。
これで、単3電池2本で10時間くらい持つかと思います。(電源切り忘れ対策にパイロットランプを明るくしよう…、)
ですが、今月、秋月への注文が6回目になるので躊躇してます。
ですが、
便利じゃ無いと、
使わない⇒お蔵入り
も、
効率以前の問題。
あと、フォースコントロールも導入してみると面白いかも。
実機のフォスコントロールスティックは、
実験段階で、パイロットがドコで操縦桿を引き切ったのか判らず、
無駄に引っ張って腕が疲れると言うことで、
F-16では、6mmのガタをもうけてるそうです。
ホールセンサーでの操縦桿のリニアリティーは、
ある程度、狭角のコントロールが望ましいので、
柄が長いスティックが相性が良いようですね。
あと、ハイセンターなリターンバネの強いモノとか。
まあ、±20°ならほぼ気にせず、±35°位でも問題ないと思います。
精度面では、ガタが無く、再現性が高く、
耐久性が高い。
というトコでしょうか。
プロポでラダー等のデッドゾーンが設定できるとイイですね。
+++++++++++++++++++++++++
EK7000という話題の?安いアクションカメラを購入して撮影。
FullHD動画です。1080pは相当イイらしいです。(4Kはダメらしい。)
撮影って落ち着かないですね。
昔のカメラ
シングルローターでPixHawkでは、
ヘッドトラッキング機
電源を電池に、
プロポと操縦桿の比較実験。
プロポも安定がイマイチですが、
ソコは撮影してると集中出来てない部分も。
+++++++++++++++++++++++++
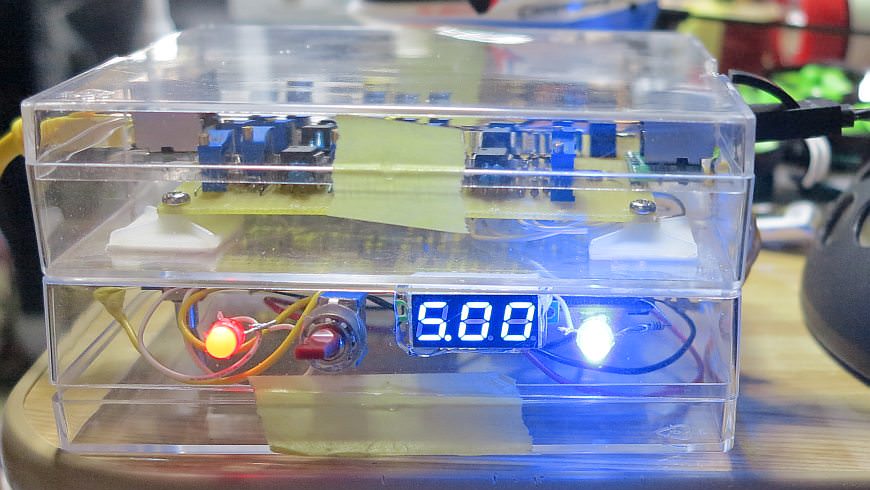
電池電源化です。
単三電池2本です。
電流消費が400mA近くあったので、4〜5時間でしょうか。
そのため、電源に切り忘れは致命的。
なので、パイロットランプを付けました。
超高輝度の青と、赤のLEDは、点滅します。
http://www.metalcraftbyblair.com/index.php?main_page=index&products_id=13255&sort=20a&page=7
先進技術を積極的に入れて、
ヘルメットマウントディスプレーも結構変わっていったようですが、
もう開発生産はしてない機体ですね。
追記>
HMDを付けない飛行を続けてますが、
だんだん、飛行になれてきました。
上下動のコントロールががシビアですが、直観的にはあってる操作なので、それなりかな。
特に、放電容量の多い電池が安定につながります。
+++++++++++++++++++++++++
今、つくったジョイスティックの回路を電池で動かすことを考えてます。
プロポから電源をとっても良いですが、
ワイヤリングが増えるのもイヤですので。
乾電池を考えてるです。
(室内ならACアダプタで済みますが)
乾電池の電池容量は、体積に比例では無い。
小さいほど、エネルギー密度が高い。
例えば、単4に対し単3は倍程度しか容量が無い。
でも、コスパ考えたら、単3が一番のようですね。
昔、ソーラーカーの昇圧回路を扱って試作とかしてたときに、解ったことですが、
(昇圧じゃ無くって下げる時も原理は同じです。)
スイッチング電源は、コイルに磁束を貯め、半導体で入出を切り替えて、磁束から電流に替え、電圧が下がったらまた…、
を繰り返す比較的単純な回路なのですが、コイルや制御回路をよくしたりで効率が90パーセントを超えるモノもあります。
(Cに充電して直列にして放電する?という、チャージポンプ式?と言うのもアル)
ちなみに、DCプリントモーターなんてのを使ってたので、
スピードコントローラーはPWMで、矩形波を積分して三角波を出し、
コントローラーからの基準電圧とOP-AMPでコンパレートして、それでMOS-FETをスイッチングするだけです。
気にするのは、電流のメインストリートを太くするだけです。
で、話がそれましたが、
制作コストから、スイッチング電源二段重ねを用います。
初段のスイッチング電源で昇圧して、後段のスイッチング電源で±を出します。
でも、今使ってるイーター電機のスイッチング電源はあんま効率が良くないです。
スペックでは効率65パーセントはある思うのですが、±5V総合で50mA出すのに、入力に5V200mA食う…。
他のも、僅かなマイナス電源を出すだけで途端に効率が下がるモノが。
で、
初段は、秋月の
「昇圧型DC/DCコンバータ5〜25V可変出力電源モジュール組立キット」
にしようかと思っており、
効率90パーセント以上でリップルは100mVとまあまあ良好です。
これで、単3電池2本で10時間くらい持つかと思います。(電源切り忘れ対策にパイロットランプを明るくしよう…、)
ですが、今月、秋月への注文が6回目になるので躊躇してます。
ですが、
便利じゃ無いと、
使わない⇒お蔵入り
も、
効率以前の問題。
あと、フォースコントロールも導入してみると面白いかも。
実機のフォスコントロールスティックは、
実験段階で、パイロットがドコで操縦桿を引き切ったのか判らず、
無駄に引っ張って腕が疲れると言うことで、
F-16では、6mmのガタをもうけてるそうです。
ホールセンサーでの操縦桿のリニアリティーは、
ある程度、狭角のコントロールが望ましいので、
柄が長いスティックが相性が良いようですね。
あと、ハイセンターなリターンバネの強いモノとか。
まあ、±20°ならほぼ気にせず、±35°位でも問題ないと思います。
精度面では、ガタが無く、再現性が高く、
耐久性が高い。
というトコでしょうか。
プロポでラダー等のデッドゾーンが設定できるとイイですね。
+++++++++++++++++++++++++
EK7000という話題の?安いアクションカメラを購入して撮影。
FullHD動画です。1080pは相当イイらしいです。(4Kはダメらしい。)
撮影って落ち着かないですね。
昔のカメラ
シングルローターでPixHawkでは、
ヘッドトラッキング機
電源を電池に、
プロポと操縦桿の比較実験。
プロポも安定がイマイチですが、
ソコは撮影してると集中出来てない部分も。
+++++++++++++++++++++++++
電池電源化です。
単三電池2本です。
電流消費が400mA近くあったので、4〜5時間でしょうか。
そのため、電源に切り忘れは致命的。
なので、パイロットランプを付けました。
超高輝度の青と、赤のLEDは、点滅します。
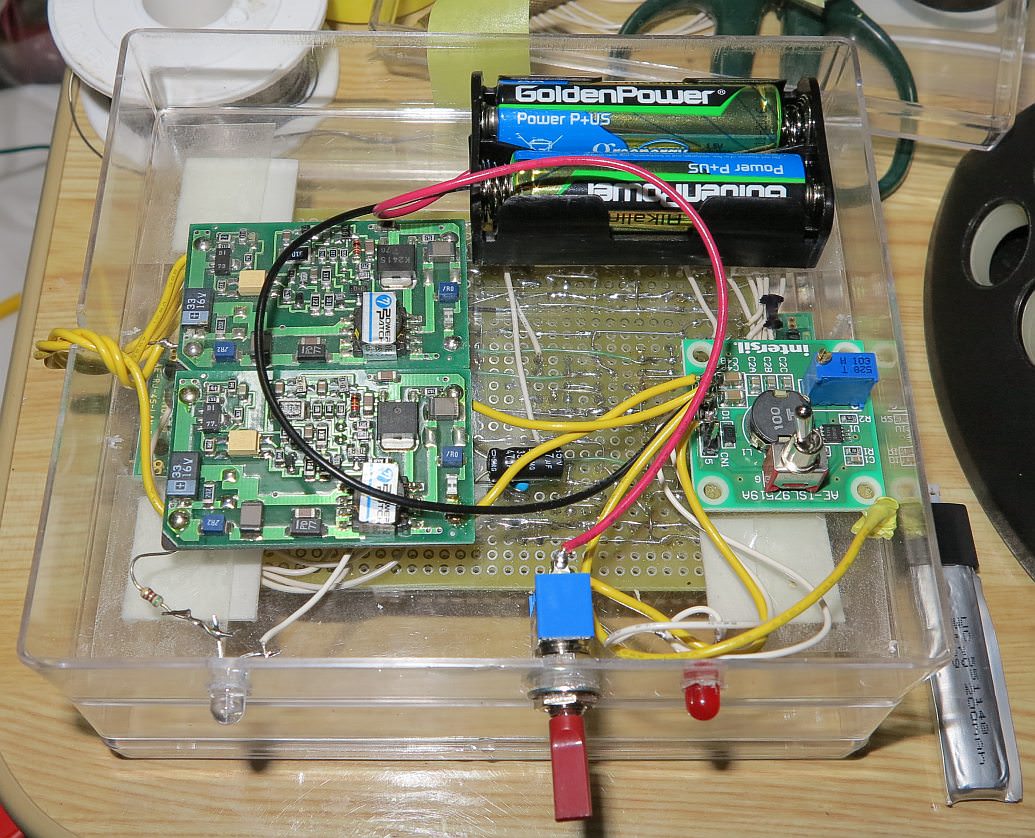
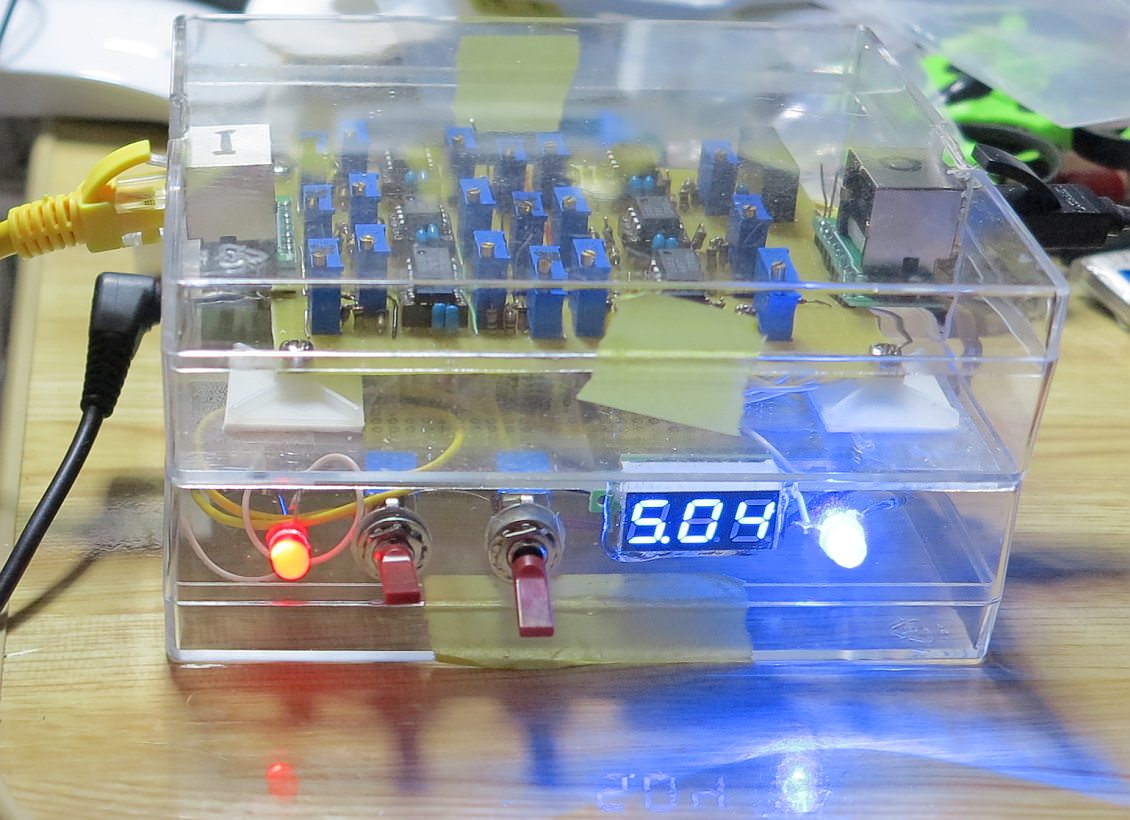
 ポリカーボネートな下段の箱に
電源回路を入れてます。
電池から、まず前段のスイッチング電源で5Vに昇圧して、
後段のスイッチング電源で±5Vを生成します。
ポリカーボネートな下段の箱に
電源回路を入れてます。
電池から、まず前段のスイッチング電源で5Vに昇圧して、
後段のスイッチング電源で±5Vを生成します。
 −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
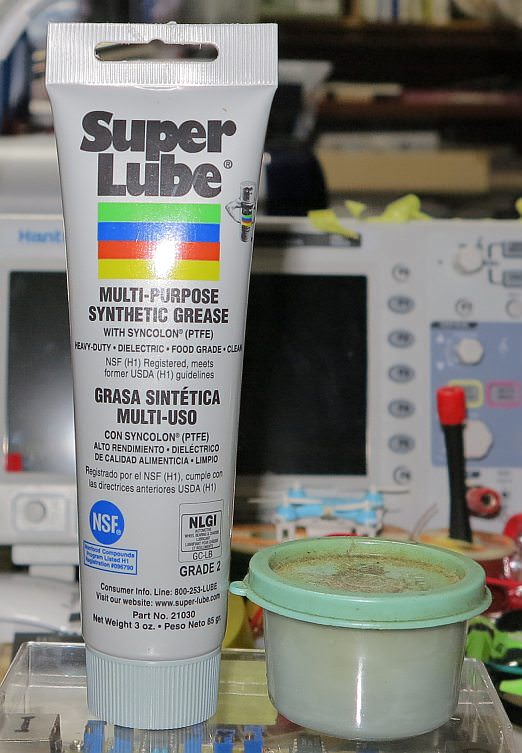
コントローラーの潤滑グリースに、
左はシリコーンにテフロンの入ったヤツで、
非ニュートン粘弾性体という絡みつく性質のモノが入ってます。
プラ使用OKです。
右は、自作グリース。
シリコーングリースに、
STPオイルトリートメント(青缶)で絡みつく粘弾性を持たせ、
テフロン、セラミックパウダーを混ぜてます。
プラ使用は、…どうなのか?
ですが、
モノによっては染みは付くかもですが酷い結果は経験してないです。。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
コントローラーの潤滑グリースに、
左はシリコーンにテフロンの入ったヤツで、
非ニュートン粘弾性体という絡みつく性質のモノが入ってます。
プラ使用OKです。
右は、自作グリース。
シリコーングリースに、
STPオイルトリートメント(青缶)で絡みつく粘弾性を持たせ、
テフロン、セラミックパウダーを混ぜてます。
プラ使用は、…どうなのか?
ですが、
モノによっては染みは付くかもですが酷い結果は経験してないです。。
 どちらも、シリコーンが入っているので、
電気接点には付かないよう気をつけた方が良いです。
重機用グリースは、ねっとりしてて、持ちが良いですが。
金属用ですね。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
プロポの利点は、ポータブルなことと、
カーブの関数が設定できるとかあります。
この場合、プロポに繋いでるので、
操縦桿も、カーブを替えられるので、その点問題ないです。
(バネ圧などのセッティングも重要でありますが)
慣れたら、操縦桿の方が有利だと思います。
また、
FPVだと、更に、操縦桿が向いてる気がします。
(日本はモード1という変態スティックコントロールなので、モード2や3と比較して。)
米軍のFPVなドローンも、操縦桿ですから、
やっぱ、こっちが合理的なのだと思います。
あとは気分の問題が、超重要w
E010もCX10も加速度センサーが入ってるから、
コントロール以外の急激な上下変化はキャンセルできると思うのですが、
実際、設定を書き換えられるフライトコントローラーでは、バロメータなしで、
垂直方向の安定化する機構もパラメータもありますし。
今後に期待という感じでしょうかね〜、、、
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
追記>
スロットルカーブは、今まで直線で頑張ってきたのですが、
ヘリの標準的なスロットルカーブ設定にしてみました。
具体的数値はT-Rexの説明書のを参考にして、、
(E010は重いのでちょっと弄ってありますが、)
どちらも、シリコーンが入っているので、
電気接点には付かないよう気をつけた方が良いです。
重機用グリースは、ねっとりしてて、持ちが良いですが。
金属用ですね。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
プロポの利点は、ポータブルなことと、
カーブの関数が設定できるとかあります。
この場合、プロポに繋いでるので、
操縦桿も、カーブを替えられるので、その点問題ないです。
(バネ圧などのセッティングも重要でありますが)
慣れたら、操縦桿の方が有利だと思います。
また、
FPVだと、更に、操縦桿が向いてる気がします。
(日本はモード1という変態スティックコントロールなので、モード2や3と比較して。)
米軍のFPVなドローンも、操縦桿ですから、
やっぱ、こっちが合理的なのだと思います。
あとは気分の問題が、超重要w
E010もCX10も加速度センサーが入ってるから、
コントロール以外の急激な上下変化はキャンセルできると思うのですが、
実際、設定を書き換えられるフライトコントローラーでは、バロメータなしで、
垂直方向の安定化する機構もパラメータもありますし。
今後に期待という感じでしょうかね〜、、、
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
追記>
スロットルカーブは、今まで直線で頑張ってきたのですが、
ヘリの標準的なスロットルカーブ設定にしてみました。
具体的数値はT-Rexの説明書のを参考にして、、
(E010は重いのでちょっと弄ってありますが、)
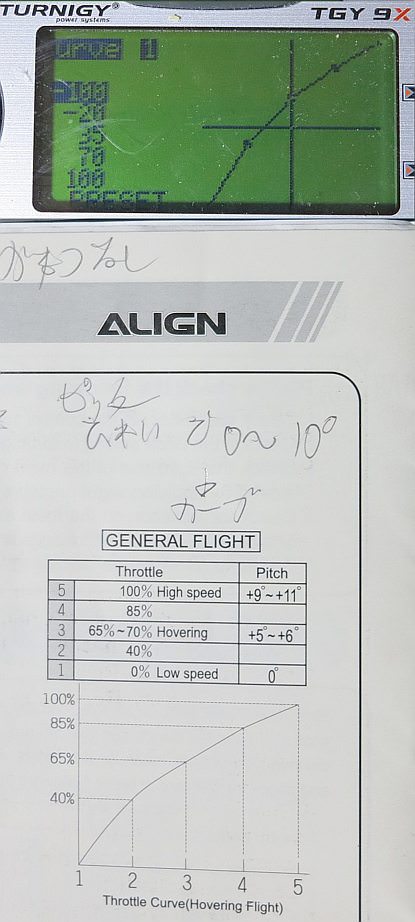 上下動の扱いやすさ、安定性が驚くほど改善。
あと、
他の軸のエクスポネンシャルをちょびっと上げました。
+++++++++++++++++++++++++
E010のFPVもやってみたいですが、
記録をどうするか?というのがあります。
シングルローターもFPVは可能だが、最初の横滑りを考えると、片手でハンドランチが出来ないのもあって、ちょっと今の場所では狭いかも。
強化したV1からV2に載せ替えるのは、…ですが。
上下動の扱いやすさ、安定性が驚くほど改善。
あと、
他の軸のエクスポネンシャルをちょびっと上げました。
+++++++++++++++++++++++++
E010のFPVもやってみたいですが、
記録をどうするか?というのがあります。
シングルローターもFPVは可能だが、最初の横滑りを考えると、片手でハンドランチが出来ないのもあって、ちょっと今の場所では狭いかも。
強化したV1からV2に載せ替えるのは、…ですが。
 現段階、モード3と勝手の違うスティックへの慣れが重要。
FPVなら、比較的すんなりと?
電圧モニタも付けました。
電流消費はそれなり。
現段階、モード3と勝手の違うスティックへの慣れが重要。
FPVなら、比較的すんなりと?
電圧モニタも付けました。
電流消費はそれなり。
 ++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
NECなFCSは、基板にThrustmasterと書いてありましたw
ちなみに、オリジナルの可変抵抗は狭角タイプでした。
黒い色の接点グリースが使われてました。
で、
まず、これを、高耐久性の可変抵抗にしようと思ったです。
++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
NECなFCSは、基板にThrustmasterと書いてありましたw
ちなみに、オリジナルの可変抵抗は狭角タイプでした。
黒い色の接点グリースが使われてました。
で、
まず、これを、高耐久性の可変抵抗にしようと思ったです。
 中に入ってた鉄の重りはイロイロ問題なので、ハズしました。
変わりの非常磁性体な鉛とか、底面にステンレス板とか考えねば。
可変抵抗のDカットの部分の寸法が違うのですが、ガタ無くハマるです。
ですが、
固定ネジの長さが短く、取り付けは困難。
なので、諦めて、
ホール素子化が進行中。
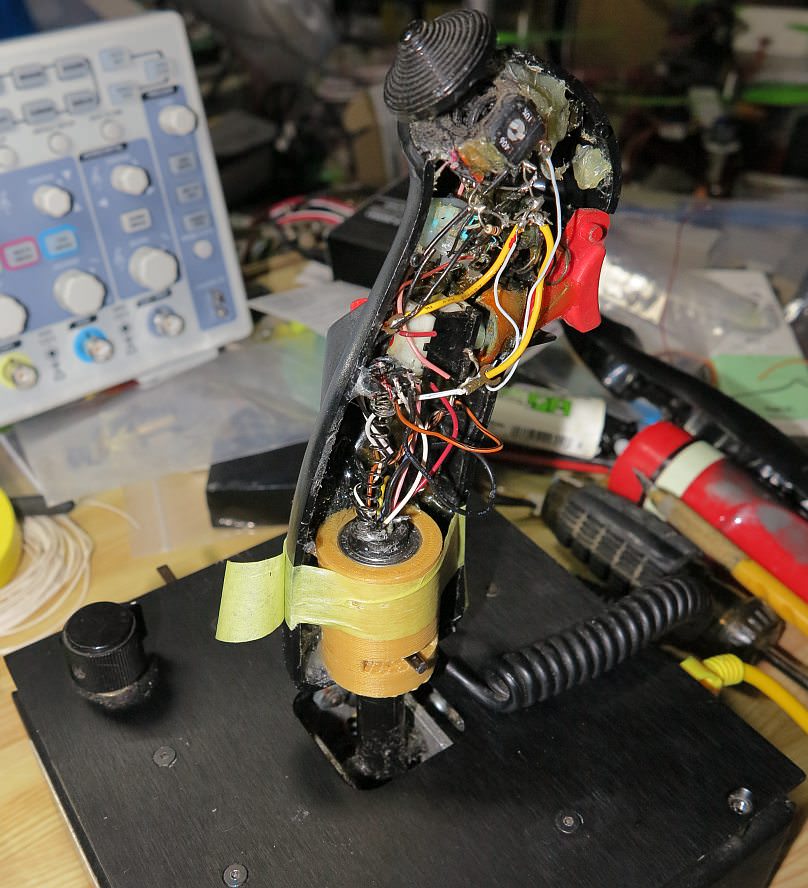
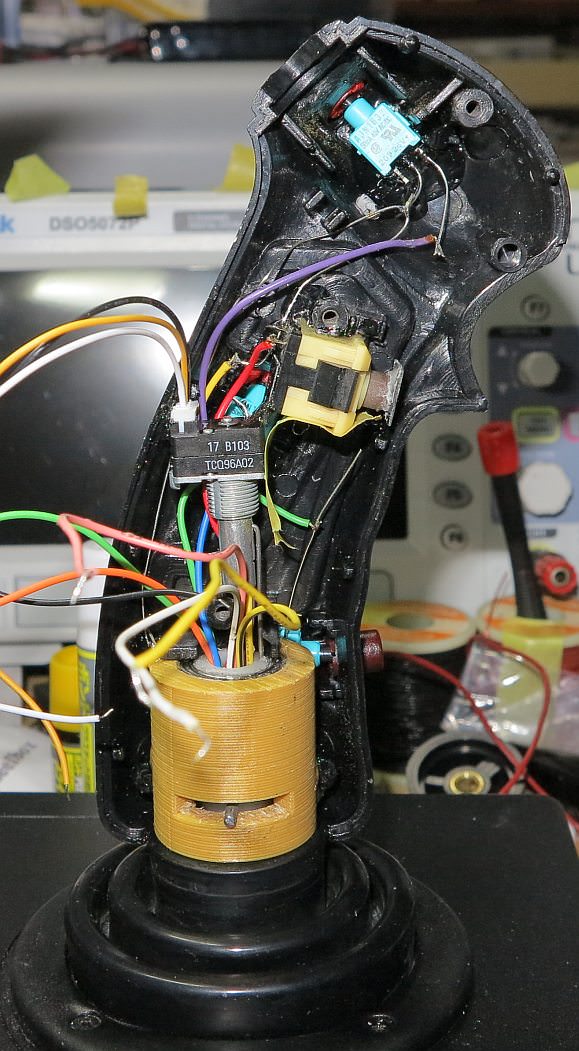
とりあえず、モトの可変抵抗から無駄な部分を引っぺがし、
軸と、軸受けなネジとナットだけにしました。
軸を旋盤で垂直に切り詰め。
ホール素子を取り付けるマウントを接着。
中に入ってた鉄の重りはイロイロ問題なので、ハズしました。
変わりの非常磁性体な鉛とか、底面にステンレス板とか考えねば。
可変抵抗のDカットの部分の寸法が違うのですが、ガタ無くハマるです。
ですが、
固定ネジの長さが短く、取り付けは困難。
なので、諦めて、
ホール素子化が進行中。
とりあえず、モトの可変抵抗から無駄な部分を引っぺがし、
軸と、軸受けなネジとナットだけにしました。
軸を旋盤で垂直に切り詰め。
ホール素子を取り付けるマウントを接着。
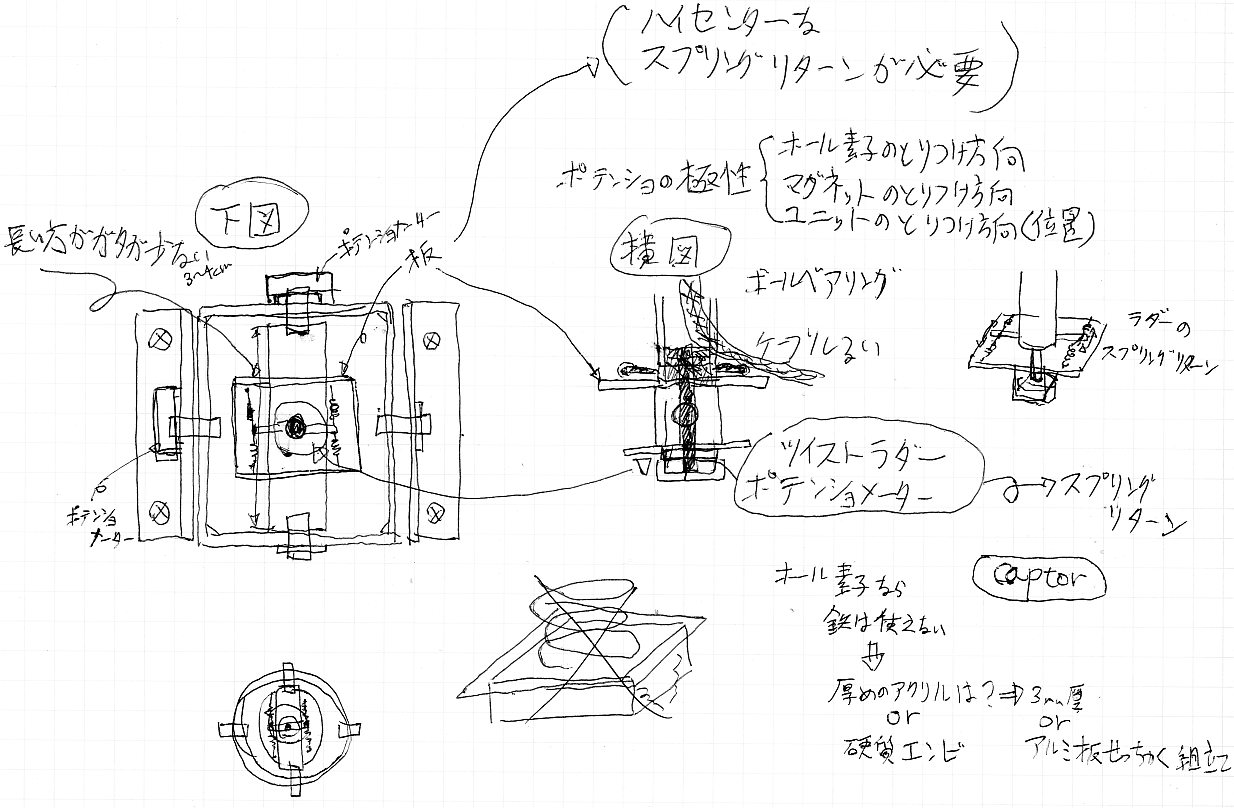
 マグネットを取り付ける。
アルミのL字アングル材(12x12x1mm)を垂直に接着。
(ケース上面でも集中した磁場漏れ以外は悪くはないかも?)
マグネットを取り付ける。
アルミのL字アングル材(12x12x1mm)を垂直に接着。
(ケース上面でも集中した磁場漏れ以外は悪くはないかも?)
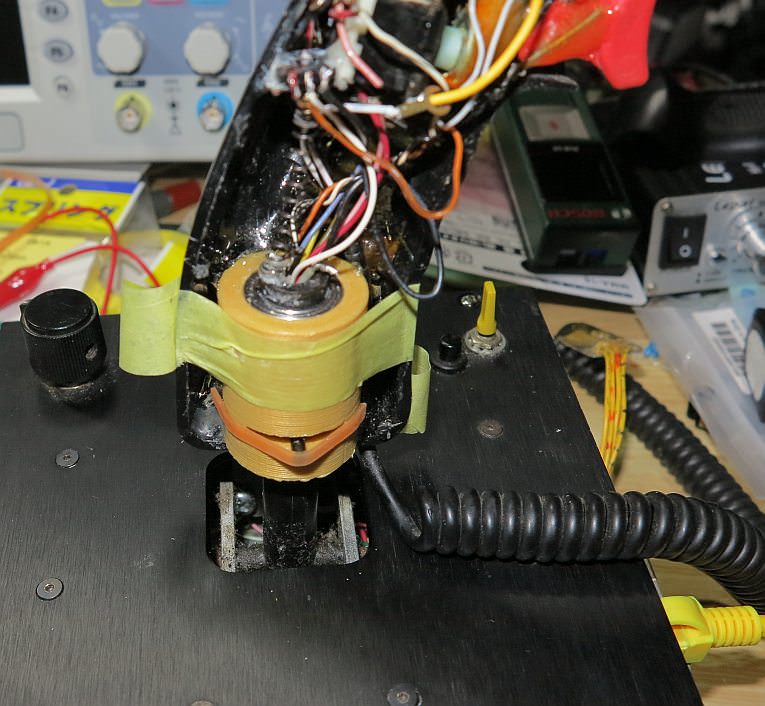
 コネクター(LAN用)とスロットル用の可変抵抗の取り付け。
コネクター(LAN用)とスロットル用の可変抵抗の取り付け。
 幅広で薄め(20x10mm)のネオジウムマグネット三段重ねで取り付け。
強さもコントロール出来るし、
それぞれの重なりを微妙にずらしてセンタートリム調整も出来るという案です。
幅広で薄め(20x10mm)のネオジウムマグネット三段重ねで取り付け。
強さもコントロール出来るし、
それぞれの重なりを微妙にずらしてセンタートリム調整も出来るという案です。
 スロットル(コレクティブ)に付いてるツマミは改良する予定。
ラグ版をターミナル的に使う。
保存が長くてへたってるアルカリ電池を使ってますが、
電池寿命は案外短いと思います。
スロットル(コレクティブ)に付いてるツマミは改良する予定。
ラグ版をターミナル的に使う。
保存が長くてへたってるアルカリ電池を使ってますが、
電池寿命は案外短いと思います。
 −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
あとは、難関とも思われる、「ねじりラダー機構」の組み込みですね。
半田付けを外さないよう考えてましたが、
結局、ベアリングを通すので、ハズさねば、と思いました。
突起部分を、ピラニアンソーもどきで、切り落とし、ちょっと整形して、内径12.7mmベアリングをはめ、接着しました。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
あとは、難関とも思われる、「ねじりラダー機構」の組み込みですね。
半田付けを外さないよう考えてましたが、
結局、ベアリングを通すので、ハズさねば、と思いました。
突起部分を、ピラニアンソーもどきで、切り落とし、ちょっと整形して、内径12.7mmベアリングをはめ、接着しました。

 ハマりにくいのに無理矢理ベアリングをはめようとすると、
ベアリングがゆがんで回りが悪くなります。
あと、シャフトに対し斜めに固定すると良くないので、あらかじめ、柔らかめの接着剤でこていするか、
最終的に組んではめるときに接着します。
結局、前回のような感じの構造にするです。
前回の様にネジ穴があるわけで無いので、
手作業で、水平、垂直、センターを意識して、慎重に穴を空ける。
が、センターは若干ズレてしまいました。でもまあ、予想よりはマシな方かな。
横に挿すシャフトが若干細いので、ゴムとの接着に困りそう。
接着面積を増やすためのエンドキャップみたいなのが欲しいですね。
ハマりにくいのに無理矢理ベアリングをはめようとすると、
ベアリングがゆがんで回りが悪くなります。
あと、シャフトに対し斜めに固定すると良くないので、あらかじめ、柔らかめの接着剤でこていするか、
最終的に組んではめるときに接着します。
結局、前回のような感じの構造にするです。
前回の様にネジ穴があるわけで無いので、
手作業で、水平、垂直、センターを意識して、慎重に穴を空ける。
が、センターは若干ズレてしまいました。でもまあ、予想よりはマシな方かな。
横に挿すシャフトが若干細いので、ゴムとの接着に困りそう。
接着面積を増やすためのエンドキャップみたいなのが欲しいですね。
 外径19mmのベアリングに対し、
ABS樹脂の内径は、19.6mmで内面を軽くサンドペーパーがけしたらぴったり。
外径19mmのベアリングに対し、
ABS樹脂の内径は、19.6mmで内面を軽くサンドペーパーがけしたらぴったり。
 シャフトが、ちょっと長すぎるのでリューターにディスクな砥石にて切断。
シャフトが、ちょっと長すぎるのでリューターにディスクな砥石にて切断。
 まずは、スイッチをマシなモノに。
タクトスイッチだったのをストロークと耐久性のあるプッシュ型に改造。
まずは、スイッチをマシなモノに。
タクトスイッチだったのをストロークと耐久性のあるプッシュ型に改造。
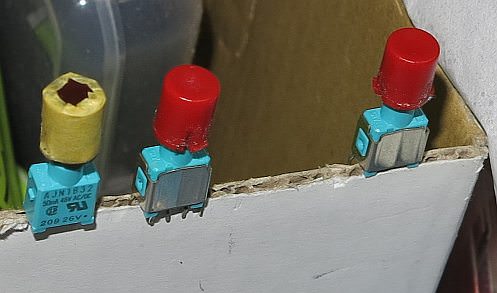 欲を言えば更にラッチ感が欲しいですね。
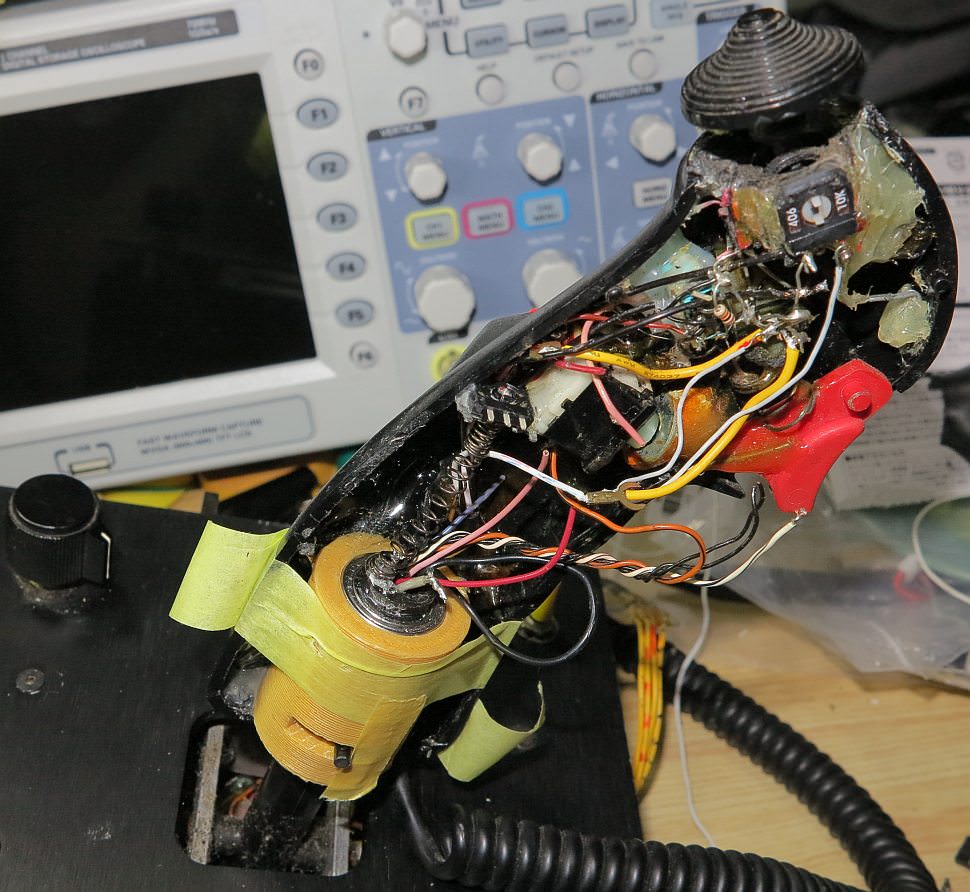
グリップ内部の切削。軸の固定。
受け側をセンター軸をずらさず削るのは難しい。
削りを判断するのは、クラフトナイフで手作業。たまにドリルに先端工具。
目で見た感じと感触。大いにカンが必要ですね。
この作業、6時間以上やってた気がします。
削って、スイッチ取り付け、
欲を言えば更にラッチ感が欲しいですね。
グリップ内部の切削。軸の固定。
受け側をセンター軸をずらさず削るのは難しい。
削りを判断するのは、クラフトナイフで手作業。たまにドリルに先端工具。
目で見た感じと感触。大いにカンが必要ですね。
この作業、6時間以上やってた気がします。
削って、スイッチ取り付け、
 接着剤、はスーパーXGで固定。
精度的には、上手くくっつきました。
接着剤、はスーパーXGで固定。
精度的には、上手くくっつきました。
 トリガーは、メカニカルキーボードのモノを。
最終的な硬さが出るまでの数日間は、操縦桿と取り付け部分が僅かにゆがむ。
硬化待ちが長いですが、良い感じかと。
で、
待ってるのもアレなので、ツイストラダーを無効にした状態で飛行させてみたところ、
センターリターンが強いためか、エルロン、エレベーターは、案外良く安定してます。
コレクティブレバーも考えなくては。
でもって、
ツイストラダーは、かなり大変そうです。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
φ0.8mmピアノ線をジョイントにすることにしたけど、
結構難しそうで、成功するか不安でした。
ねじり強度も気になりましたが…、
φ0.8mmの超硬ドリルを手で慎重に回しながら穴を空ける。
トリガーは、メカニカルキーボードのモノを。
最終的な硬さが出るまでの数日間は、操縦桿と取り付け部分が僅かにゆがむ。
硬化待ちが長いですが、良い感じかと。
で、
待ってるのもアレなので、ツイストラダーを無効にした状態で飛行させてみたところ、
センターリターンが強いためか、エルロン、エレベーターは、案外良く安定してます。
コレクティブレバーも考えなくては。
でもって、
ツイストラダーは、かなり大変そうです。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
φ0.8mmピアノ線をジョイントにすることにしたけど、
結構難しそうで、成功するか不安でした。
ねじり強度も気になりましたが…、
φ0.8mmの超硬ドリルを手で慎重に回しながら穴を空ける。
 φ0.8mmピアノ線をL字に曲げて、それに瞬着を塗って、素早く圧入。
φ0.8mmピアノ線をL字に曲げて、それに瞬着を塗って、素早く圧入。
 200万回の高耐久ポテンショメーター。←秋月にあるが、角度センサーでは出てこない。
φ0.8mmの超硬ドリルで横穴を空ける。
200万回の高耐久ポテンショメーター。←秋月にあるが、角度センサーでは出てこない。
φ0.8mmの超硬ドリルで横穴を空ける。
 トリガー用のキーボードスイッチの裏にカーボン板を貼り付け、延長して隙間を埋め、(カーボンである必要性は無いが)
ポテンショメーターを固定。コネクタの付いてる側も固定。
接着剤は、スーパーXG
トリガー用のキーボードスイッチの裏にカーボン板を貼り付け、延長して隙間を埋め、(カーボンである必要性は無いが)
ポテンショメーターを固定。コネクタの付いてる側も固定。
接着剤は、スーパーXG
 横からの図。
横からの図。
 かなりキツキツにパーツが組まれてるので、寸法のとりかたで失敗もあり得たと思いますが、
運が良かったのか、ぴったりです。
この向きで、更にスーパーXGで裏打ち。
かなりキツキツにパーツが組まれてるので、寸法のとりかたで失敗もあり得たと思いますが、
運が良かったのか、ぴったりです。
この向きで、更にスーパーXGで裏打ち。
 センターリターンは
モビロンバンド3重重ね。
シャフトの固定がどうしても剥がれるので、
穴を空けて、シャフトを通すようにしました。
この方法でも、穴が裂けてくる気配は無し。
センターリターンは
モビロンバンド3重重ね。
シャフトの固定がどうしても剥がれるので、
穴を空けて、シャフトを通すようにしました。
この方法でも、穴が裂けてくる気配は無し。
 とりあえずのできあがり。
とりあえずのできあがり。
 この状態で、E010を飛ばしてみたところ、
ラダーは、案外安定です。
総じて穏やかという感じですが、コレクティブがこの方法ではちょっと直観では混乱する感じ。
この状態で、E010を飛ばしてみたところ、
ラダーは、案外安定です。
総じて穏やかという感じですが、コレクティブがこの方法ではちょっと直観では混乱する感じ。
 で、この状態で、FPV機にすると、持って10秒と言ったところ。
というのも、
機体が重いのもあって、降下してきて、素早く正確に上昇に転じることに失敗する。
コレクティブレバーを回す方向性は慣れてきたけど、角度が広すぎるのが大きな原因かと。
コレクティブレバーは
実物のミニチュアみたいにする感じで。
もうちょっと改良したいです。
追記>
と思って、飛ばしてたら、どうも目に見えて上がらなくなってきた。
目視でも最初は上昇するけど殆ど飛ばないし、カクンと下降し、復帰が出来ない…。
モーターの寿命としても早すぎるので疑問。
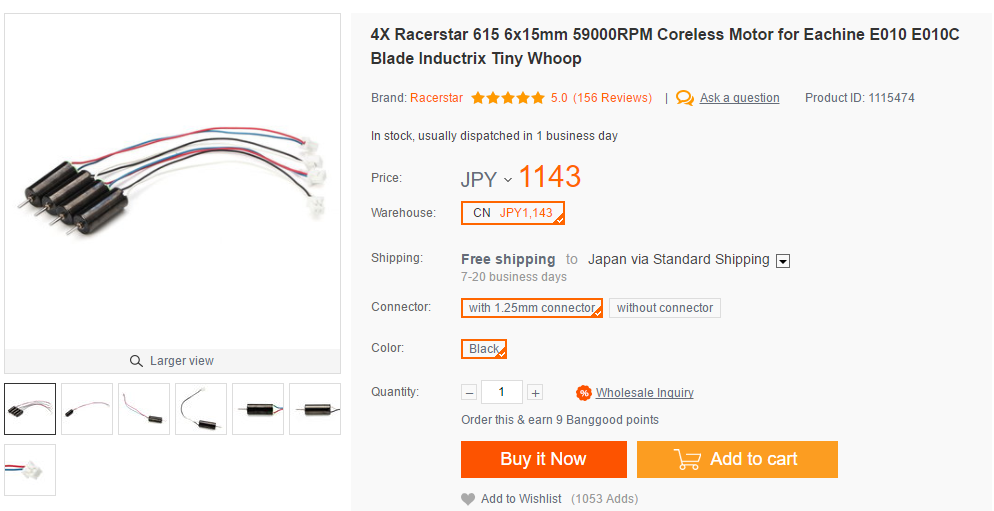
交換するとしたら、
交換用モーターはちょっと高級なモノがあるのですが、カメラ無し機体と同じくらいの値段。<1500円位
で、この状態で、FPV機にすると、持って10秒と言ったところ。
というのも、
機体が重いのもあって、降下してきて、素早く正確に上昇に転じることに失敗する。
コレクティブレバーを回す方向性は慣れてきたけど、角度が広すぎるのが大きな原因かと。
コレクティブレバーは
実物のミニチュアみたいにする感じで。
もうちょっと改良したいです。
追記>
と思って、飛ばしてたら、どうも目に見えて上がらなくなってきた。
目視でも最初は上昇するけど殆ど飛ばないし、カクンと下降し、復帰が出来ない…。
モーターの寿命としても早すぎるので疑問。
交換するとしたら、
交換用モーターはちょっと高級なモノがあるのですが、カメラ無し機体と同じくらいの値段。<1500円位
 コネクタ付きのを選んだので、コネクタを付けようかとも思ってたのですが、
受け側のコネクタも注文しなければ、なので、なんだか非常におっくうです。
ACアダプタにも対応。
あり合わせ故に、
切り替えスイッチと電源スイッチの色が同じのが残念なトコ。
コネクタ付きのを選んだので、コネクタを付けようかとも思ってたのですが、
受け側のコネクタも注文しなければ、なので、なんだか非常におっくうです。
ACアダプタにも対応。
あり合わせ故に、
切り替えスイッチと電源スイッチの色が同じのが残念なトコ。
 −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
上昇の悪さが少し緩和したのとスロットルの扱いに慣れてきたので、
降下するまで、FPV状態で30秒位の飛行が出来ました。
その時は、不安感無く安定してたので、
この下降の問題が解決すれば、かなり長く飛ばせるようです。
機体は、根本解決はしてないので、どこか(多分モーターのブラシ)がへたってきてるのだと思います。
しかし、補修はどうしたものか?
モータのコネクタは、1.25mmJSTとあるので、
「DF13シリーズ ストレートピンヘッダー02P 1.25mmピッチ」
かな?と思っています。
普通のE010にカメラコネクタを付けて機体は使い捨てというのがラクなのですが、
これもまた、違う種類のコネクタの注文が…、
せっかくの高級モーターですし。
コネクタを基板に付けると、外すとき、パターンごと剥いでしまう可能性が予想されるので、
コネクタは、単にくっつければ良いなんてモノでもありません。
追記>
FPVでは、慎重に飛ばして、降下が復帰できなくなるまで、一分ちょいは滞空できました。
慣れれば、FPVの方が操縦しやすい可能性も出てきました。
+++++++++++++++++++++++++
モーター交換することにしました。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
上昇の悪さが少し緩和したのとスロットルの扱いに慣れてきたので、
降下するまで、FPV状態で30秒位の飛行が出来ました。
その時は、不安感無く安定してたので、
この下降の問題が解決すれば、かなり長く飛ばせるようです。
機体は、根本解決はしてないので、どこか(多分モーターのブラシ)がへたってきてるのだと思います。
しかし、補修はどうしたものか?
モータのコネクタは、1.25mmJSTとあるので、
「DF13シリーズ ストレートピンヘッダー02P 1.25mmピッチ」
かな?と思っています。
普通のE010にカメラコネクタを付けて機体は使い捨てというのがラクなのですが、
これもまた、違う種類のコネクタの注文が…、
せっかくの高級モーターですし。
コネクタを基板に付けると、外すとき、パターンごと剥いでしまう可能性が予想されるので、
コネクタは、単にくっつければ良いなんてモノでもありません。
追記>
FPVでは、慎重に飛ばして、降下が復帰できなくなるまで、一分ちょいは滞空できました。
慣れれば、FPVの方が操縦しやすい可能性も出てきました。
+++++++++++++++++++++++++
モーター交換することにしました。
 分解するとき、モーターの一個で髪の毛がシャフトに軽く引っかかってたので、もしかするとですが、
で、
結局コネクタはハズし、直接半田付けました。
モーターのコネクタと、カメラの電源コネクタは、同一規格でした。
分解するとき、モーターの一個で髪の毛がシャフトに軽く引っかかってたので、もしかするとですが、
で、
結局コネクタはハズし、直接半田付けました。
モーターのコネクタと、カメラの電源コネクタは、同一規格でした。
 モーターの色は黒ですが、赤とかも売られてます。
モーターの色は黒ですが、赤とかも売られてます。
 で、これで、飛行させますと、
かなり上昇能力があり、
以前は、機体が重いので、スティックがセンターよりかなり上の方でホバリングが保ててたのが、
大体センターになるようになりました。
ただ、結構モーターが熱くなります。
FPVの飛行動画が欲しいトコですね。
出来ました。
+++++++++++++++++++++++++
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
飛ばしてみて、
NECなスラストマスターが
スプリングリターンが強くハイセンターで都合が良いのですが、
風や、テールローターの影響などセンターが定まらない場合は、
延長スティックの方に分が上がる。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
とりあえず、
一段落ついたら、なんか、喪失感があったのですが、
今度は、
「機体」の方を、もうちょっとマシなモノにしようかとも思いました。
ですが、
金欠と海外からの注文なので、かなり遅くなりそうです。
本格的には、E010なクラス(TinyWoop)でも、パーツ単位で選んで組めるのですが、
やけに高く付くかも、
なので、とりあえず、また、組まれたのをとか、
ブラシレスモーターにしたいけど重くて衝突時の負担が…、とか考えてます。
FPVとか送受信機では、電池残量が判らないのが気になってるのですが、
OSDは、まだ無理かも。
で、光ファイバーなどで、LEDからカメラへ、というのもチマチマしてて…、
とにかく、来月ですね。17/06/27
+++++++++++++++++++++++++
で、これで、飛行させますと、
かなり上昇能力があり、
以前は、機体が重いので、スティックがセンターよりかなり上の方でホバリングが保ててたのが、
大体センターになるようになりました。
ただ、結構モーターが熱くなります。
FPVの飛行動画が欲しいトコですね。
出来ました。
+++++++++++++++++++++++++
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
飛ばしてみて、
NECなスラストマスターが
スプリングリターンが強くハイセンターで都合が良いのですが、
風や、テールローターの影響などセンターが定まらない場合は、
延長スティックの方に分が上がる。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
とりあえず、
一段落ついたら、なんか、喪失感があったのですが、
今度は、
「機体」の方を、もうちょっとマシなモノにしようかとも思いました。
ですが、
金欠と海外からの注文なので、かなり遅くなりそうです。
本格的には、E010なクラス(TinyWoop)でも、パーツ単位で選んで組めるのですが、
やけに高く付くかも、
なので、とりあえず、また、組まれたのをとか、
ブラシレスモーターにしたいけど重くて衝突時の負担が…、とか考えてます。
FPVとか送受信機では、電池残量が判らないのが気になってるのですが、
OSDは、まだ無理かも。
で、光ファイバーなどで、LEDからカメラへ、というのもチマチマしてて…、
とにかく、来月ですね。17/06/27
+++++++++++++++++++++++++
 この二つで室内飛行にて比較してみました。
まず、FPVでなく、普通に飛ばすと、
左は、細かい、じんわりとした操作が得意
右は、ハイセンター、素早い操作が得意。
なハズですが、
室内では、右の圧勝です。
FPVでは、更に顕著に表れました。
イロイロつくったから得られたことなので、
ここまで快適になったのは、収穫ですね。
左のは、もっとセンターリターンスプリングが強いほうが良い感じですね。。
また、もっとD/Rを大きくしてもOKかも。
外などの、風があれば、ハイセンターなのはそれほど有利にならないと思います。
また、広い外では、それほど正確な位置も要求されないとすると、
逆転する可能性は大いにあります。
室内では、
ハイセンターで、狭角で、ちょっと長めのスティックがイイかも?
プロポのソフトで「遊び(デッドバンド)」が指定できると更に良いのですが、、、
コントロールスティックが長いと、
平行移動という感じで、細かい操作ができます。
短いと、こねくり回す感じで、素早い操作がやりやすいです。
実機もヘリは柄が長いことからそんな感じなのでしょうね。
ハイニュートラルなスティックの保持力は、GPS等でセンターで機体が停止するように出来てる機体じゃ無いと、
逆に、風の中キツいというのがあるという寸法だと思います。←EXPカーブだと非対称な操作感覚で更に大変に。
なので、操縦系統に電子制御が介在してるコマンチやF-35などは、
柄が短い(サイド)スティックで、ハイニュートラルに出来てるのだと思います。
FBW(フライバイワイヤー)機のD/R制御としては、
たしか、
F-16が、離着時に操縦桿の感度を半減させることが出来るのがあったですね。
制御の利点は主に
・GPSなどの操縦サポート
・カーブがEXP特性だったり、D/Rな感度調整が出来る。
これが実現して、初めて、ハイセンターリターンの利点が生きてくるのだと思います。
FBWのツイストな操縦桿は、繊細な操作をする場合、
ある程度軽く握った方がイイかも?
というのも、
デッドバンドがあったり、センター圧に閾値があるとは言え、
ぐぐっと握って扱ってしまうと、ラダーなどが回ってしまったりする場合も…、、
+++++++++++++++++++++++++
前回の操縦桿の比較の予想に対し、
早くも結果が出ました。
シングルローター機のV911-V2で飛ばすと、E010の場合と結果が逆転して柄の長いセンターリターンが弱い方が扱いやすく、有利でした。
とにかく、スティックを斜めに維持するのが結構大変。
まあ、若干トリムがズレていたのもありましたが、
そういうことです。
+++++++++++++++++++++++++
確定した回路図と設定とか。
この二つで室内飛行にて比較してみました。
まず、FPVでなく、普通に飛ばすと、
左は、細かい、じんわりとした操作が得意
右は、ハイセンター、素早い操作が得意。
なハズですが、
室内では、右の圧勝です。
FPVでは、更に顕著に表れました。
イロイロつくったから得られたことなので、
ここまで快適になったのは、収穫ですね。
左のは、もっとセンターリターンスプリングが強いほうが良い感じですね。。
また、もっとD/Rを大きくしてもOKかも。
外などの、風があれば、ハイセンターなのはそれほど有利にならないと思います。
また、広い外では、それほど正確な位置も要求されないとすると、
逆転する可能性は大いにあります。
室内では、
ハイセンターで、狭角で、ちょっと長めのスティックがイイかも?
プロポのソフトで「遊び(デッドバンド)」が指定できると更に良いのですが、、、
コントロールスティックが長いと、
平行移動という感じで、細かい操作ができます。
短いと、こねくり回す感じで、素早い操作がやりやすいです。
実機もヘリは柄が長いことからそんな感じなのでしょうね。
ハイニュートラルなスティックの保持力は、GPS等でセンターで機体が停止するように出来てる機体じゃ無いと、
逆に、風の中キツいというのがあるという寸法だと思います。←EXPカーブだと非対称な操作感覚で更に大変に。
なので、操縦系統に電子制御が介在してるコマンチやF-35などは、
柄が短い(サイド)スティックで、ハイニュートラルに出来てるのだと思います。
FBW(フライバイワイヤー)機のD/R制御としては、
たしか、
F-16が、離着時に操縦桿の感度を半減させることが出来るのがあったですね。
制御の利点は主に
・GPSなどの操縦サポート
・カーブがEXP特性だったり、D/Rな感度調整が出来る。
これが実現して、初めて、ハイセンターリターンの利点が生きてくるのだと思います。
FBWのツイストな操縦桿は、繊細な操作をする場合、
ある程度軽く握った方がイイかも?
というのも、
デッドバンドがあったり、センター圧に閾値があるとは言え、
ぐぐっと握って扱ってしまうと、ラダーなどが回ってしまったりする場合も…、、
+++++++++++++++++++++++++
前回の操縦桿の比較の予想に対し、
早くも結果が出ました。
シングルローター機のV911-V2で飛ばすと、E010の場合と結果が逆転して柄の長いセンターリターンが弱い方が扱いやすく、有利でした。
とにかく、スティックを斜めに維持するのが結構大変。
まあ、若干トリムがズレていたのもありましたが、
そういうことです。
+++++++++++++++++++++++++
確定した回路図と設定とか。
 +++++++++++++++++++++++++
ココのは、
http://www.aerotronicsllc.com/f16sscgrip.htm
見ると、本物から型取りしたのかな?
Block50のモデル
で、落札した豪華なジョイスティックセットの方なのですが、
SuncomのF-15Eの模倣品と、Thrustmasterなラダーが目玉かな?
ジョイスティック詰め合わせを落札することになりました。
で、
16200円+送料1214円で、
ちょい高いかも?とも思ったのですが、改造に使うのでジャンクとか関係ないし、落札しました。
全てゲームポート用(15pin)です。
☆操縦桿2個
・Suncom STRIKE FIGHTER SERIES F-15E TALON
・Saitek CYBORG stick 2000
☆スロットル2個
・CH-Products Pro Throttle
・Suncom STRIKE FIGHTER SERIES SFS THROTTLE
☆ラダーペダル
・THRUSTMASTER ELITE RUDDER PEDAL
素材が増えたら作業も大変かも?
+++++++++++++++++++++++++
ココのは、
http://www.aerotronicsllc.com/f16sscgrip.htm
見ると、本物から型取りしたのかな?
Block50のモデル
で、落札した豪華なジョイスティックセットの方なのですが、
SuncomのF-15Eの模倣品と、Thrustmasterなラダーが目玉かな?
ジョイスティック詰め合わせを落札することになりました。
で、
16200円+送料1214円で、
ちょい高いかも?とも思ったのですが、改造に使うのでジャンクとか関係ないし、落札しました。
全てゲームポート用(15pin)です。
☆操縦桿2個
・Suncom STRIKE FIGHTER SERIES F-15E TALON
・Saitek CYBORG stick 2000
☆スロットル2個
・CH-Products Pro Throttle
・Suncom STRIKE FIGHTER SERIES SFS THROTTLE
☆ラダーペダル
・THRUSTMASTER ELITE RUDDER PEDAL
素材が増えたら作業も大変かも?
 で、落札した詰め合わせに入ってたモノが到着。
夜に落札、朝6時に発送、次の日の朝に到着。と早かったです。
Saitekは昔っから欠陥商品レベルに壊れやすくって
スティックやラダーが売られてましたが、接触不良、断線、バネの折れ、やっぱ壊れているものも多いですね。
ただ、サイボーグは、WinなUSB版は評判が悪いようですが、15ピン版のこれは壊れにくそう。
ポテンショメーターは、たしか、抵抗が高いので、
200万回な可変抵抗式が手軽にハマりそう。
で、落札した詰め合わせに入ってたモノが到着。
夜に落札、朝6時に発送、次の日の朝に到着。と早かったです。
Saitekは昔っから欠陥商品レベルに壊れやすくって
スティックやラダーが売られてましたが、接触不良、断線、バネの折れ、やっぱ壊れているものも多いですね。
ただ、サイボーグは、WinなUSB版は評判が悪いようですが、15ピン版のこれは壊れにくそう。
ポテンショメーターは、たしか、抵抗が高いので、
200万回な可変抵抗式が手軽にハマりそう。
 SuncomのF-15Eのレプリカ的なモノ
今は無いメーカーのようですが、
かなり良く出来たマニアックな稀少品ようです。
ソレを考えると、割高でも無かったかも。
海外では、何個も買い置きしてるヒトや、改造プロジェクトもアルみたい。
つまり、かなりディープに追求してる強者がいる感じw
悩みどころは
USBジョイスティック用にするか、RCコントローラー用にするか?
ですね。
それぞれ一つずつ欲しい感じ。
厄介なのが、
ジンバルのポテンショメーターがスライド式。
ホールセンサー化に、対向する磁石配置でこれを再現してる猛者もいる。
幅は、ゆるめなら、リニアリティーが高いのでは無いのかと思われます。
その代わり、増幅器が必要。
それか、腰下のみ別のとニコイチするか?
ネジは3/32インチ?のヘックス、よって、キツいけど2.5mmのを無理矢理ねじ込んであけました。
−−−−−−
ジョイスティックの場合、
15ピンゲームポートからUSBへのアダプタというのが売られてたようですが、今は目立たない?
幾つかある中で、高機能なのは、
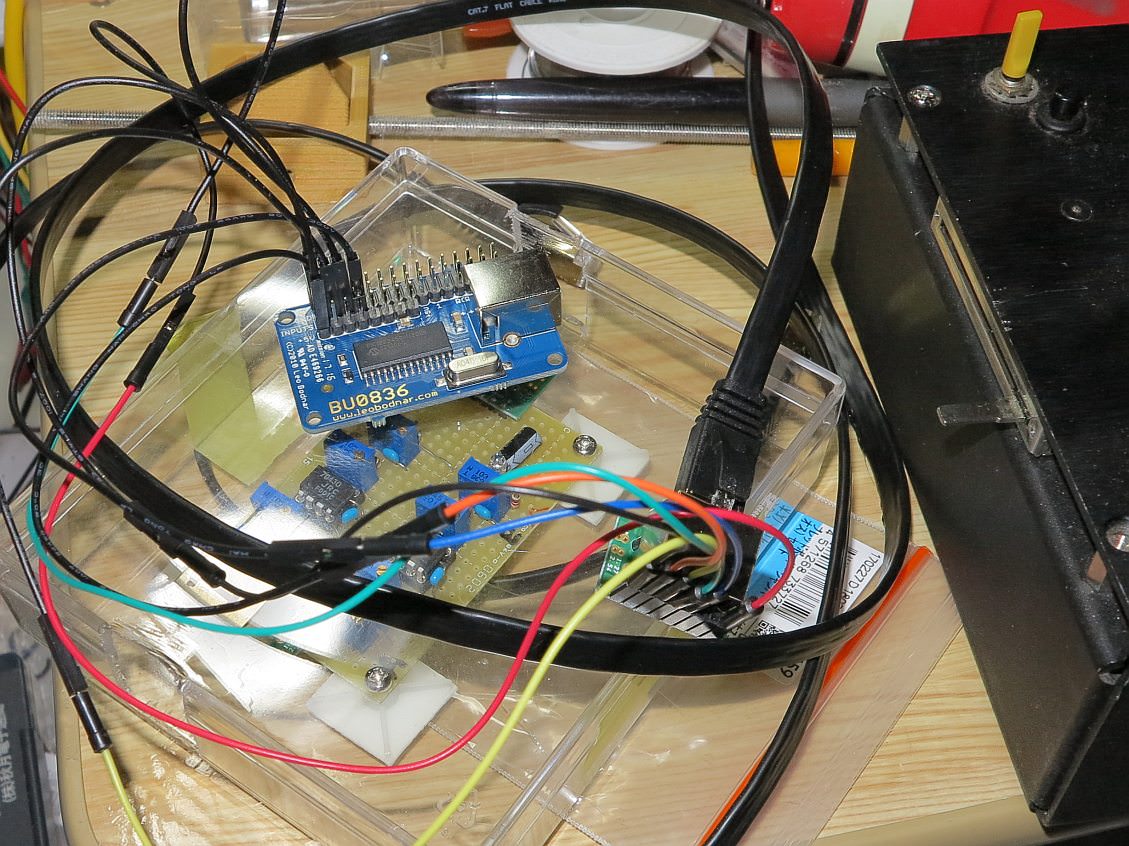
自由にスティックやマトリクスなスイッチなどを組み込んでUSBに変換させる「BU0836」があります。
http://www.leobodnar.com/products/BU0836/
キャリブレーションは昔のWinなら、狭角可変抵抗なくっても使えたようですね。
A/Dは12Bitでジョイパッドに配線するよりイイですね。
英国からなのでAirMailだと、ものすごく時間がかかりそうなので、Fedexにしたら、
送料の濃度を薄めるため、2個注文したのですが、
Peypalにて日本円で総額、10939円でした。
うーん…、
よくよく考えて見たら、すぐには使わないような急がないような気も?
Fedex、早いです。
英国からなのに、3日で着くようです。
Win10の、ジョイスティックのキャリブレーションって、
全自動なのですが、センターあわせをしてるだけ、っていう柔軟性の無さが気になります。
で、こういうのもあります。
Teensy++ USB
https://www.pjrc.com/store/teensypp.html
Teensy USB
https://www.pjrc.com/store/teensy_pins.html
MMjoy2 USB 2.0
http://simhq.com/forum/ubbthreads.php/topics/3899105/MMJoy_-_Build_your_own_USB_con
MMJoy2こっちは、結構設定細かく出来るようかも。
−−−−−−−
Thrustmasterのラダーペダル
狭角VRで分圧形式では無い。
抵抗が高い。
SuncomのF-15Eのレプリカ的なモノ
今は無いメーカーのようですが、
かなり良く出来たマニアックな稀少品ようです。
ソレを考えると、割高でも無かったかも。
海外では、何個も買い置きしてるヒトや、改造プロジェクトもアルみたい。
つまり、かなりディープに追求してる強者がいる感じw
悩みどころは
USBジョイスティック用にするか、RCコントローラー用にするか?
ですね。
それぞれ一つずつ欲しい感じ。
厄介なのが、
ジンバルのポテンショメーターがスライド式。
ホールセンサー化に、対向する磁石配置でこれを再現してる猛者もいる。
幅は、ゆるめなら、リニアリティーが高いのでは無いのかと思われます。
その代わり、増幅器が必要。
それか、腰下のみ別のとニコイチするか?
ネジは3/32インチ?のヘックス、よって、キツいけど2.5mmのを無理矢理ねじ込んであけました。
−−−−−−
ジョイスティックの場合、
15ピンゲームポートからUSBへのアダプタというのが売られてたようですが、今は目立たない?
幾つかある中で、高機能なのは、
自由にスティックやマトリクスなスイッチなどを組み込んでUSBに変換させる「BU0836」があります。
http://www.leobodnar.com/products/BU0836/
キャリブレーションは昔のWinなら、狭角可変抵抗なくっても使えたようですね。
A/Dは12Bitでジョイパッドに配線するよりイイですね。
英国からなのでAirMailだと、ものすごく時間がかかりそうなので、Fedexにしたら、
送料の濃度を薄めるため、2個注文したのですが、
Peypalにて日本円で総額、10939円でした。
うーん…、
よくよく考えて見たら、すぐには使わないような急がないような気も?
Fedex、早いです。
英国からなのに、3日で着くようです。
Win10の、ジョイスティックのキャリブレーションって、
全自動なのですが、センターあわせをしてるだけ、っていう柔軟性の無さが気になります。
で、こういうのもあります。
Teensy++ USB
https://www.pjrc.com/store/teensypp.html
Teensy USB
https://www.pjrc.com/store/teensy_pins.html
MMjoy2 USB 2.0
http://simhq.com/forum/ubbthreads.php/topics/3899105/MMJoy_-_Build_your_own_USB_con
MMJoy2こっちは、結構設定細かく出来るようかも。
−−−−−−−
Thrustmasterのラダーペダル
狭角VRで分圧形式では無い。
抵抗が高い。
 これを、耐久200万回な可変抵抗タイプに換装。ホットボンドで固定。
これを、耐久200万回な可変抵抗タイプに換装。ホットボンドで固定。
 ステレオミニプラグで接続できるよう改造ですね。
ステレオミニプラグで接続できるよう改造ですね。
 実は、ラダーの入力切り替え回路の組み込みが結構構大変だったです。
実は、ラダーの入力切り替え回路の組み込みが結構構大変だったです。
 ラダーペダルはかさばりますし、
椅子や姿勢に合った高さなどに設定したスティックの台が必要になります。
よって、面倒なコトにはなります。
で、
飛ばしてみましたが、
外部視点からだと難しいです。
ツイストラダーになれていると。逆方向に操作してしまう傾向にあります。
ただ、FPVな主観にすれば解決すると思います。
あと、マイクロクワッドを作ってる途中で、あらかた終わったとこです。
+++++++++++++++++++++++++
SuncomのF-15Eなスティックですが、
海外のやり方と違う方式で、
スライド部分にホール素子を付け、横から磁場を飛ばし、中立では磁場と素子が垂直のためゼロですが、
ズレると電圧が出る感じの方式の方がつくりやすい。
相対変化なので、磁石側を動かしてもOKと言う方法を考案しました。。
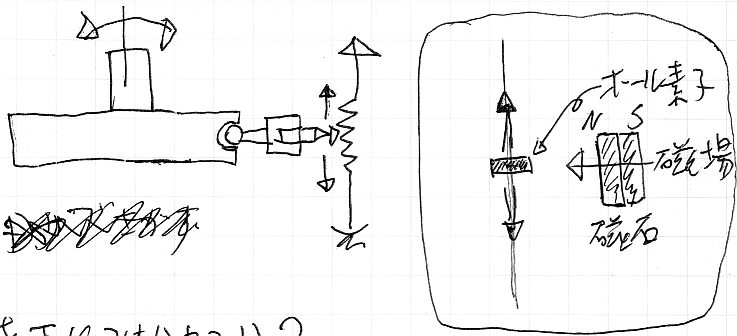
左図、スライドボリュームを使用な機構の原理の図。
右図、磁石化の感じ。
ラダーペダルはかさばりますし、
椅子や姿勢に合った高さなどに設定したスティックの台が必要になります。
よって、面倒なコトにはなります。
で、
飛ばしてみましたが、
外部視点からだと難しいです。
ツイストラダーになれていると。逆方向に操作してしまう傾向にあります。
ただ、FPVな主観にすれば解決すると思います。
あと、マイクロクワッドを作ってる途中で、あらかた終わったとこです。
+++++++++++++++++++++++++
SuncomのF-15Eなスティックですが、
海外のやり方と違う方式で、
スライド部分にホール素子を付け、横から磁場を飛ばし、中立では磁場と素子が垂直のためゼロですが、
ズレると電圧が出る感じの方式の方がつくりやすい。
相対変化なので、磁石側を動かしてもOKと言う方法を考案しました。。
左図、スライドボリュームを使用な機構の原理の図。
右図、磁石化の感じ。
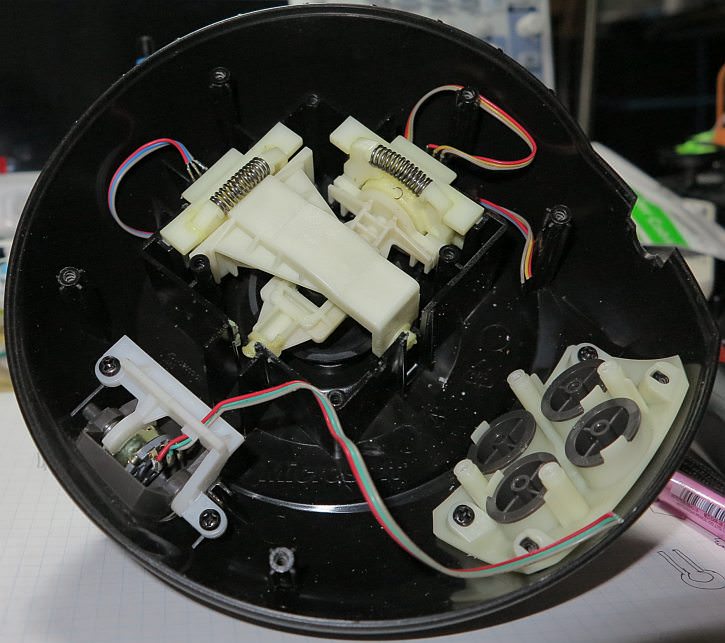
 画像中央、ボールジョイントの受け。
画像中央、ボールジョイントの受け。
 が、
この方式、
分解して、よく見ると、
ジンバル自体のガタは少ないですが、
ジンバルからボールへのガタ、そこからスライドボリュームへつながる部分が斜めになるガタが非常に大きくなりそうなものでした。
なので、
腰下部分は、別のジョイスティックから取ってきた方が賢明かも。
となると、
マイクロソフトの光やFFじゃないサイドワインダーでしょうか。
それか、ロジクールのExtremeとかでしょうか?。
スティックの軸の長さも問題
+++++++++++++++++++++++++
サイボーグ
200万回なポテンショメーターに交換。
スロットルは精度はさほど要らないのでそのまま。
が、
この方式、
分解して、よく見ると、
ジンバル自体のガタは少ないですが、
ジンバルからボールへのガタ、そこからスライドボリュームへつながる部分が斜めになるガタが非常に大きくなりそうなものでした。
なので、
腰下部分は、別のジョイスティックから取ってきた方が賢明かも。
となると、
マイクロソフトの光やFFじゃないサイドワインダーでしょうか。
それか、ロジクールのExtremeとかでしょうか?。
スティックの軸の長さも問題
+++++++++++++++++++++++++
サイボーグ
200万回なポテンショメーターに交換。
スロットルは精度はさほど要らないのでそのまま。
 +++++++++++++++++++++++++
ホールセンサーの利点、
ポテンショメーター内部のバックラッシュみたいなモノが無い。
操作した量で線を描かせるとギザギザにならないでスムーズに
ジンバルが、比較的簡素に作れる。
ということで、
ジンバルを作って見たい気も。
ボールベアリング入りで。ガタ無く。
問題はリターンスプリング。SaitekやSuncomな感じがラクにおもうのですが。
それかフォースコントロールのように柄の部分を押さえつける方式か。
+++++++++++++++++++++++++
ホールセンサーの利点、
ポテンショメーター内部のバックラッシュみたいなモノが無い。
操作した量で線を描かせるとギザギザにならないでスムーズに
ジンバルが、比較的簡素に作れる。
ということで、
ジンバルを作って見たい気も。
ボールベアリング入りで。ガタ無く。
問題はリターンスプリング。SaitekやSuncomな感じがラクにおもうのですが。
それかフォースコントロールのように柄の部分を押さえつける方式か。
 考えたこの方法は、グリップ内部にツイスト機構を付けるのではなく、ジンバルに側に装備させるのが特徴。
ラダーは普通のポテンショメーターで十分かと。
傾斜の伝達として、ガタの少ない方向にエルロンを割り振るとイイ。
長めにするとガタが少なくなるが、ジンバルのアームが上方に突き出てくる要素がアル。
現在考えてる構造は少々発展してますが、
基本的にこんな感じ、
++++++++++++++++++++
++++++++++++++++++++
感圧式
考えてたら、機構がめんどくなってきまして、
単純に、圧力センサーか、歪みゲージでホイートストンブリッジで、フォースコントロールな感圧式にしたく思ったりしました。
普通?の圧力センサーは対数なので、前述した歪みゲージを組み込んだロードセルが安くあったので、これを使おうと思います。
センターリターンスプリングは無しか、簡素に。
捻りラダーも違和感なくON-OFF切り替えて使えます。
出力が小さいのでAMPが必要であるが、テコの原理も使える。
でも、棒状(ビーム型)のロードセルは扱いにくいかも。
(「Flexiforce Pressure Sensor」フィルム状のピエゾ抵抗式圧力センサーっていうのもありましたが高い。)
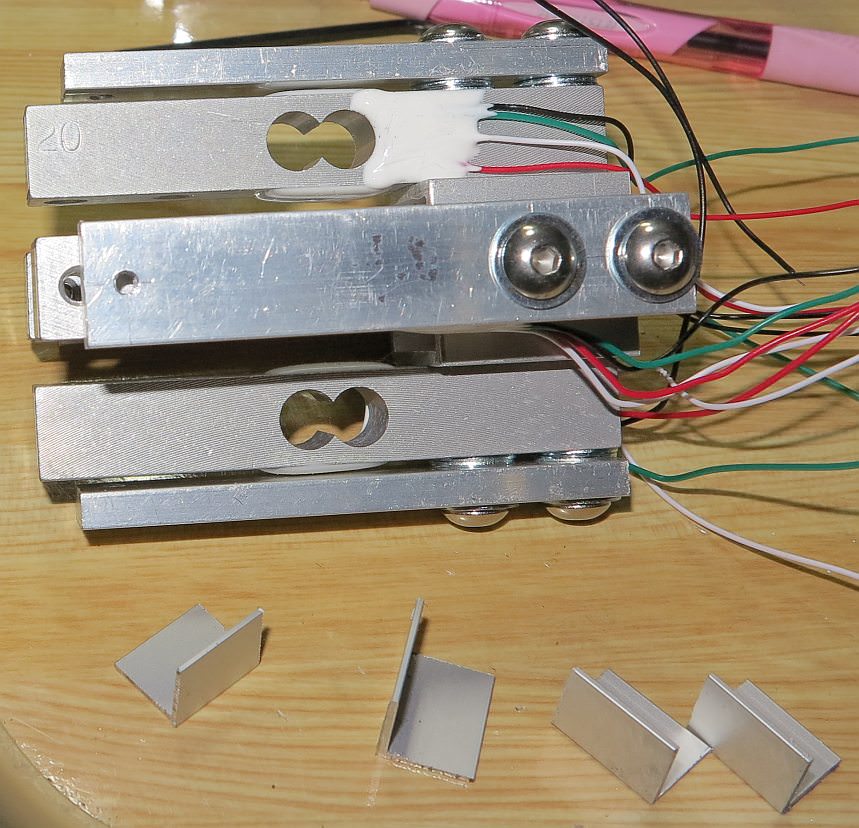
ちなみに歪みゲージの実験はこんな感じ。…20年前の実験ですが。
金属が細長く伸びるので、その抵抗上昇を、ホイートストンブリッジの分圧バランスが変わることで読み取る原理。
考えたこの方法は、グリップ内部にツイスト機構を付けるのではなく、ジンバルに側に装備させるのが特徴。
ラダーは普通のポテンショメーターで十分かと。
傾斜の伝達として、ガタの少ない方向にエルロンを割り振るとイイ。
長めにするとガタが少なくなるが、ジンバルのアームが上方に突き出てくる要素がアル。
現在考えてる構造は少々発展してますが、
基本的にこんな感じ、
++++++++++++++++++++
++++++++++++++++++++
感圧式
考えてたら、機構がめんどくなってきまして、
単純に、圧力センサーか、歪みゲージでホイートストンブリッジで、フォースコントロールな感圧式にしたく思ったりしました。
普通?の圧力センサーは対数なので、前述した歪みゲージを組み込んだロードセルが安くあったので、これを使おうと思います。
センターリターンスプリングは無しか、簡素に。
捻りラダーも違和感なくON-OFF切り替えて使えます。
出力が小さいのでAMPが必要であるが、テコの原理も使える。
でも、棒状(ビーム型)のロードセルは扱いにくいかも。
(「Flexiforce Pressure Sensor」フィルム状のピエゾ抵抗式圧力センサーっていうのもありましたが高い。)
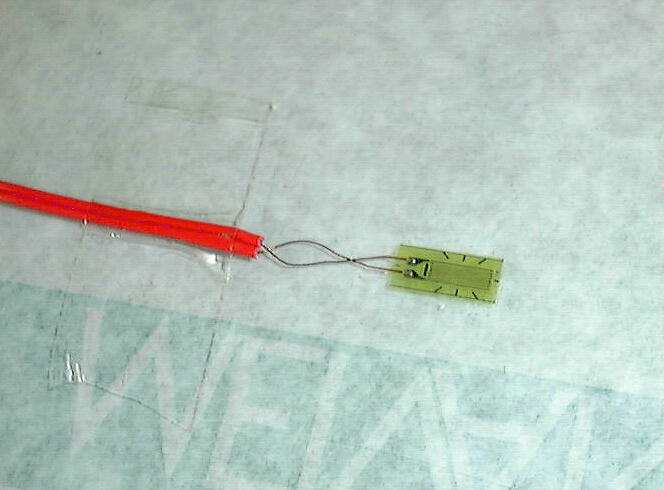
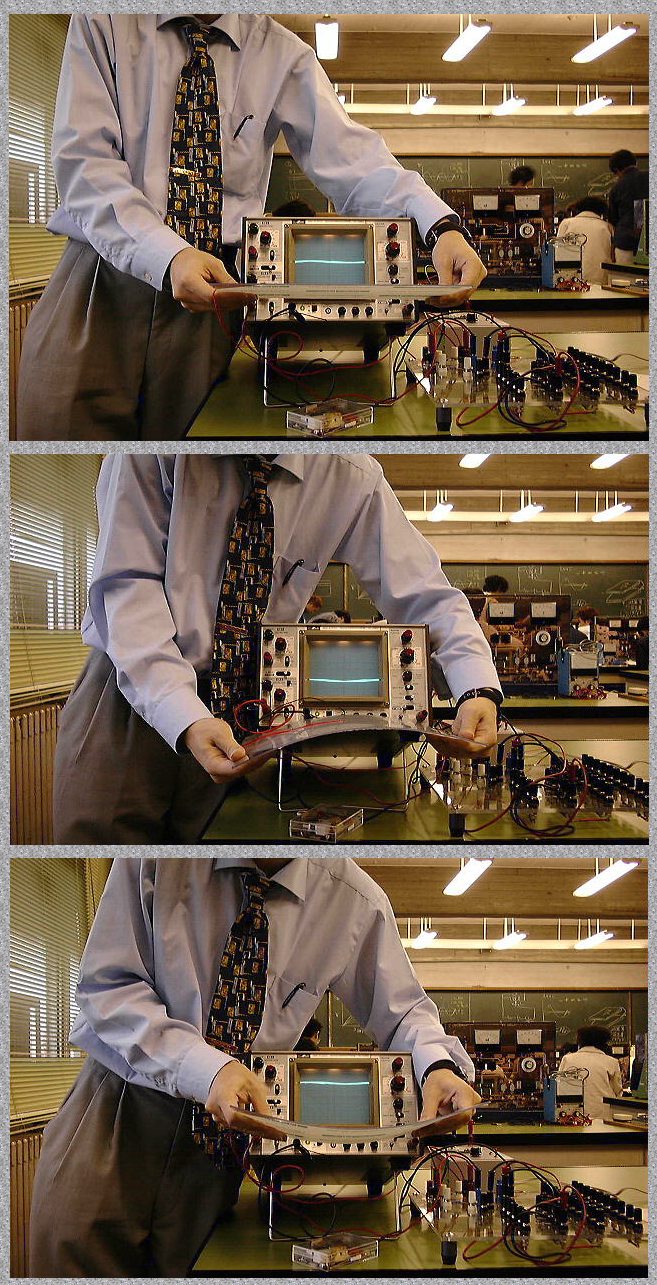
ちなみに歪みゲージの実験はこんな感じ。…20年前の実験ですが。
金属が細長く伸びるので、その抵抗上昇を、ホイートストンブリッジの分圧バランスが変わることで読み取る原理。
 当時の、大気圧計も、たしか、半導体の薄膜で歪みゲージのホイートストンブリッジ形成してました。
それで音波を拾ったり。
当時の、大気圧計も、たしか、半導体の薄膜で歪みゲージのホイートストンブリッジ形成してました。
それで音波を拾ったり。
 ケースはゆがみにくくシールドもしなければなりません。
が、妥協かも。
内側の寸法
100x90x120mmくらい
比較的安いのは、
アルミダイキャストボックス?
やっぱ、つくる?
通常のアルミケースを補強やプラケースをアルミフィルムで補強シールド。
タカチ電機工業 厚さ1.0mmと薄い
MB型アルミケース MB-21 サイズ(W)100(H)90(D)120
MB型アルミケース MB-22 サイズ(W)120(H)100(D)160←コレを使用
UCユニバーサルケース
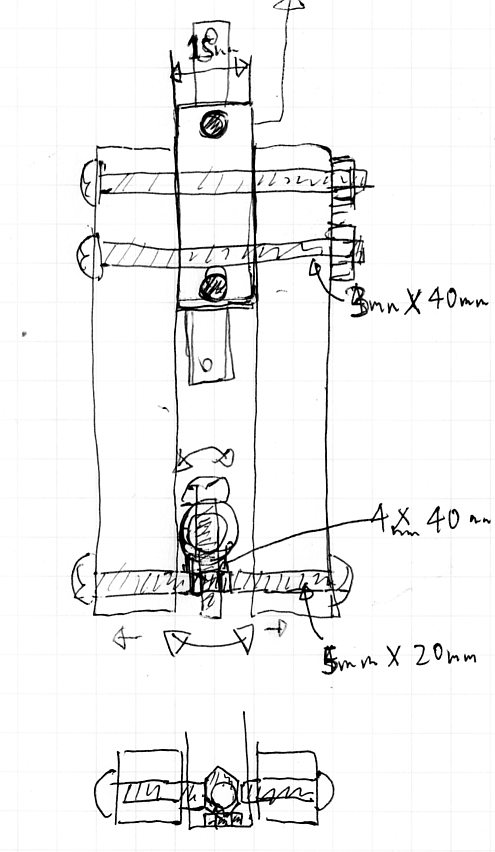
即席なのですが、
感圧式スティックの横からの概念図。
ケースはゆがみにくくシールドもしなければなりません。
が、妥協かも。
内側の寸法
100x90x120mmくらい
比較的安いのは、
アルミダイキャストボックス?
やっぱ、つくる?
通常のアルミケースを補強やプラケースをアルミフィルムで補強シールド。
タカチ電機工業 厚さ1.0mmと薄い
MB型アルミケース MB-21 サイズ(W)100(H)90(D)120
MB型アルミケース MB-22 サイズ(W)120(H)100(D)160←コレを使用
UCユニバーサルケース
即席なのですが、
感圧式スティックの横からの概念図。
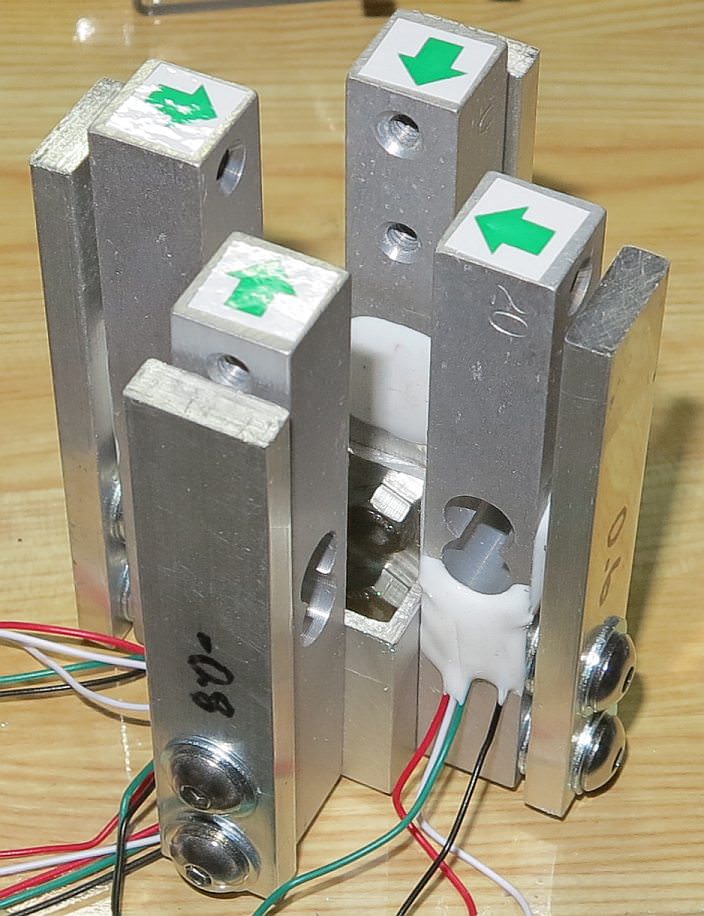
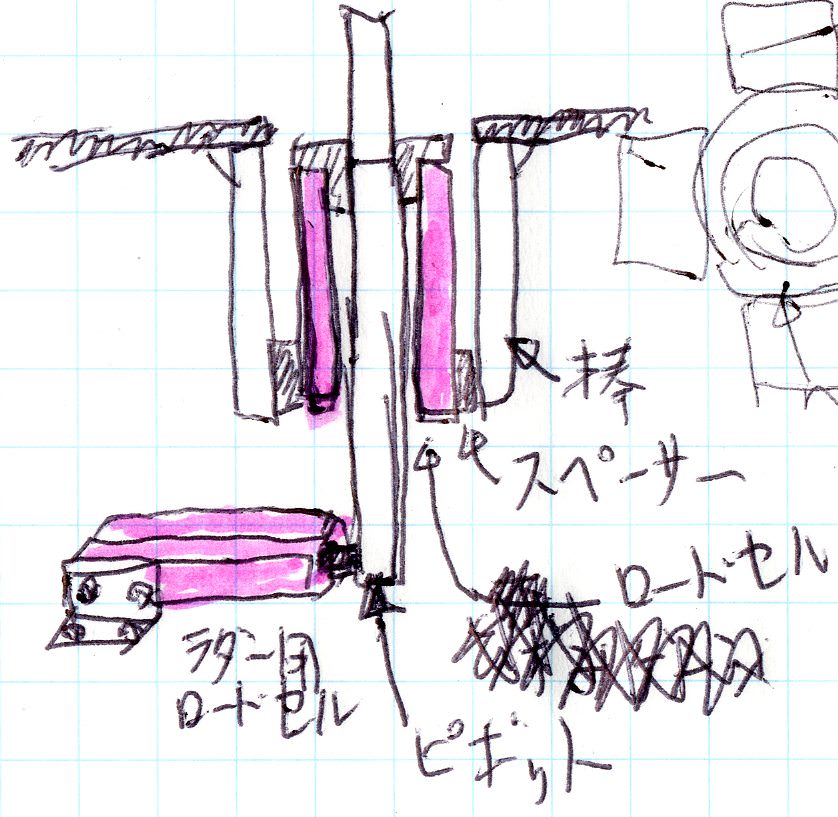 結局、棒形だと都合が悪いので、
スペーサーを介し平棒を付けてU字型にリターン。
2点の間の圧力を測る。
2Kgで、1mVの出力なので、
マイクロボルトレベルなので、増幅が不可欠ですが、
オフセットヌルなども必要そう。
F-16のスティックが金属で剛性がひつようなのは、
感圧型だからとか。
ダストシールが欲しいですね。
USBジョイスティックにするなら、コンバータは、細かく設定できるMMJoy2がイイかも。
Arduinoのボードを使うらしいです。
EXPカーブとか角度に対する操舵量のプロファイルも設定できるみたい。
Arduino PRO MICRO の5V
ATMEGA43u4, 16 MHZ, 5V
+++++++++++++++++++++++++
金属の棒の切断方法、、、
結局、棒形だと都合が悪いので、
スペーサーを介し平棒を付けてU字型にリターン。
2点の間の圧力を測る。
2Kgで、1mVの出力なので、
マイクロボルトレベルなので、増幅が不可欠ですが、
オフセットヌルなども必要そう。
F-16のスティックが金属で剛性がひつようなのは、
感圧型だからとか。
ダストシールが欲しいですね。
USBジョイスティックにするなら、コンバータは、細かく設定できるMMJoy2がイイかも。
Arduinoのボードを使うらしいです。
EXPカーブとか角度に対する操舵量のプロファイルも設定できるみたい。
Arduino PRO MICRO の5V
ATMEGA43u4, 16 MHZ, 5V
+++++++++++++++++++++++++
金属の棒の切断方法、、、
 ノギスを寸法の半分より僅かに短くして、
両端からけがく、
ガイドを当てて、
その二本線の真ん中をピラニアンソーもどきで、ひたすら切っていく。
ノギスを寸法の半分より僅かに短くして、
両端からけがく、
ガイドを当てて、
その二本線の真ん中をピラニアンソーもどきで、ひたすら切っていく。
 正確にしたいためオートなセンターポンチを注文してみたのですが、
結構ズレました。
正確にしたいためオートなセンターポンチを注文してみたのですが、
結構ズレました。
 φ5mmのネジを通すφ6mmの穴を空けますが、
刃の当たり位置をなるべく正確にしてゆっくり切っていきます。
横軸のダイヤルを10回転回して正確に15mmすらしてもう一つの穴を空けました。
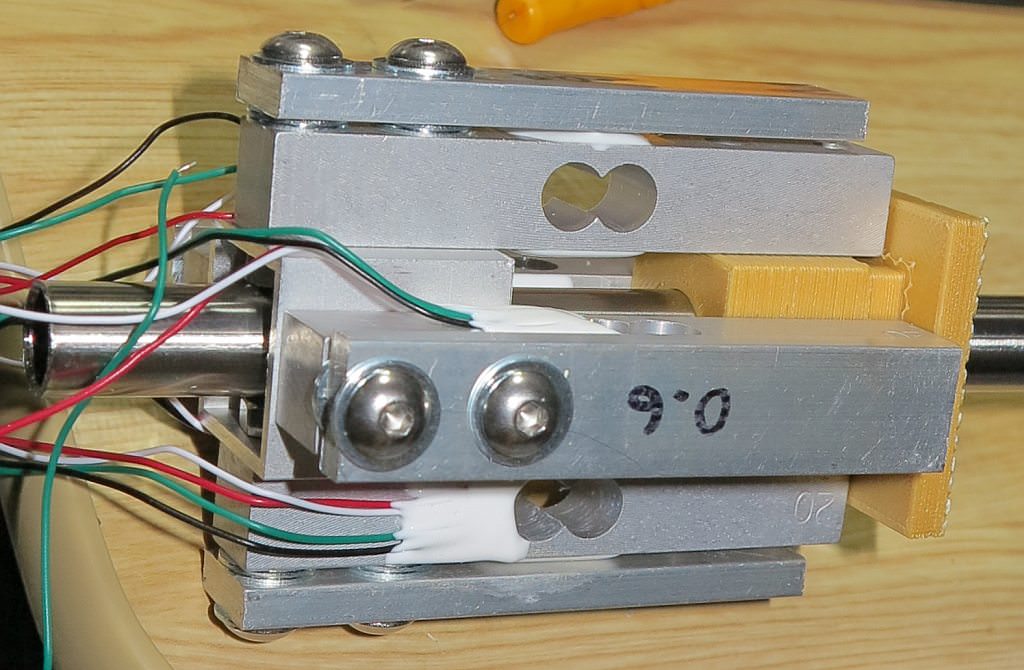
で、スペーサーとしてのワッシャーを入れて組み立てた感じ。
長さの関係は棒の方が長い方が助かるのですが…、
端材の長さがギリギリ足らなかっただけです。
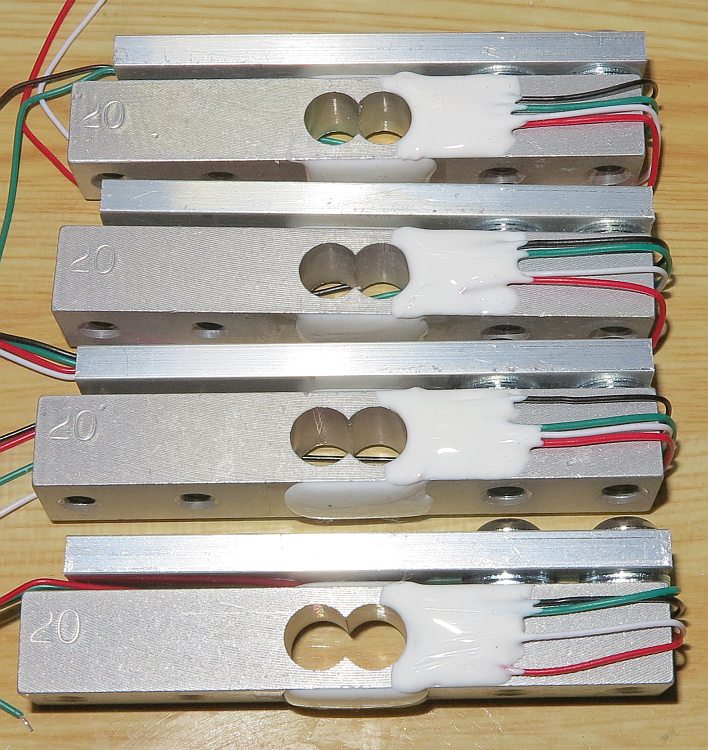
20Kgまでなので、20と刻印されております。
φ5mmのネジを通すφ6mmの穴を空けますが、
刃の当たり位置をなるべく正確にしてゆっくり切っていきます。
横軸のダイヤルを10回転回して正確に15mmすらしてもう一つの穴を空けました。
で、スペーサーとしてのワッシャーを入れて組み立てた感じ。
長さの関係は棒の方が長い方が助かるのですが…、
端材の長さがギリギリ足らなかっただけです。
20Kgまでなので、20と刻印されております。
 エルロン、エレベーターの四つ出来ました。
一つのCHに対し二つ使います。
一応、タダの歪みゲージのホイートストンブリッジなので、逆に曲げることで一つでも使えるし、電源を逆に繋ぐ使い方でもOKです。
エルロン、エレベーターの四つ出来ました。
一つのCHに対し二つ使います。
一応、タダの歪みゲージのホイートストンブリッジなので、逆に曲げることで一つでも使えるし、電源を逆に繋ぐ使い方でもOKです。
 各個体のオフセット電圧の単位はmV
最大1mVとは、操縦桿に加える最大の力の出力よりも大きい感じです。
各個体のオフセット電圧の単位はmV
最大1mVとは、操縦桿に加える最大の力の出力よりも大きい感じです。
 まず、100倍に増幅して、2段目で10倍、3段目で10倍に増幅。計10000倍程度にしようかと思っております。
初段は低オフセットOP-AMP程度では、ダメなので、超低オフセットな感じです。
古い製品ですが、OP07CPがコスパ良さそうです。
途中まで仮組み。
下の部分は、柔らかめの固定にするつもり。
方向性が逆のような気もしますが、気にしない。
まず、100倍に増幅して、2段目で10倍、3段目で10倍に増幅。計10000倍程度にしようかと思っております。
初段は低オフセットOP-AMP程度では、ダメなので、超低オフセットな感じです。
古い製品ですが、OP07CPがコスパ良さそうです。
途中まで仮組み。
下の部分は、柔らかめの固定にするつもり。
方向性が逆のような気もしますが、気にしない。
 圧力をかけるコマみたいな部分をはめこむ。
ここはガタ無くユルユルが良いのでそういう寸法にしたはずですが。
ちょっとキツいですのでネジを緩める感じかな?と思います。
圧力をかけるコマみたいな部分をはめこむ。
ここはガタ無くユルユルが良いのでそういう寸法にしたはずですが。
ちょっとキツいですのでネジを緩める感じかな?と思います。
 3Dプリントで、0.6mm程度の熱収縮をかんがえていたのだけど、
ほとんど縮んでいなかったので、
やりなおします。
0.6mm小さく作ったら、今度はガタが出たので、
モトの大きかった方の表面を紙やすりで少し磨いたら丁度良くなりました〜、
ということで、無駄な時間を過ごしてました。
ケースに穴は開いたけど。力を加えすぎて
表面はキズがあったり、でこぼこも。
カッターで切れ込みを入れて、ピラニアンソーもどきで切っていきました。
で、これをどうやって固定するかが問題。アングルで補強しながら接着かな?
3Dプリントで、0.6mm程度の熱収縮をかんがえていたのだけど、
ほとんど縮んでいなかったので、
やりなおします。
0.6mm小さく作ったら、今度はガタが出たので、
モトの大きかった方の表面を紙やすりで少し磨いたら丁度良くなりました〜、
ということで、無駄な時間を過ごしてました。
ケースに穴は開いたけど。力を加えすぎて
表面はキズがあったり、でこぼこも。
カッターで切れ込みを入れて、ピラニアンソーもどきで切っていきました。
で、これをどうやって固定するかが問題。アングルで補強しながら接着かな?
 結局M3のねじ切りました。
結局M3のねじ切りました。
 で、アングルを介してネジ止め。
で、アングルを介してネジ止め。
 仮に操縦桿をはめてみて、電圧の大きさを見る。
スティックはジョイントが付いて長くなる故、
もうちょっとトルクが出ますが。
最大で、0.5〜1mV程度と予想。
増幅は3000〜10000倍くらい必要そう。
仮に操縦桿をはめてみて、電圧の大きさを見る。
スティックはジョイントが付いて長くなる故、
もうちょっとトルクが出ますが。
最大で、0.5〜1mV程度と予想。
増幅は3000〜10000倍くらい必要そう。
 ラダー機構はまだついてません。
ラダー機構はまだついてません。
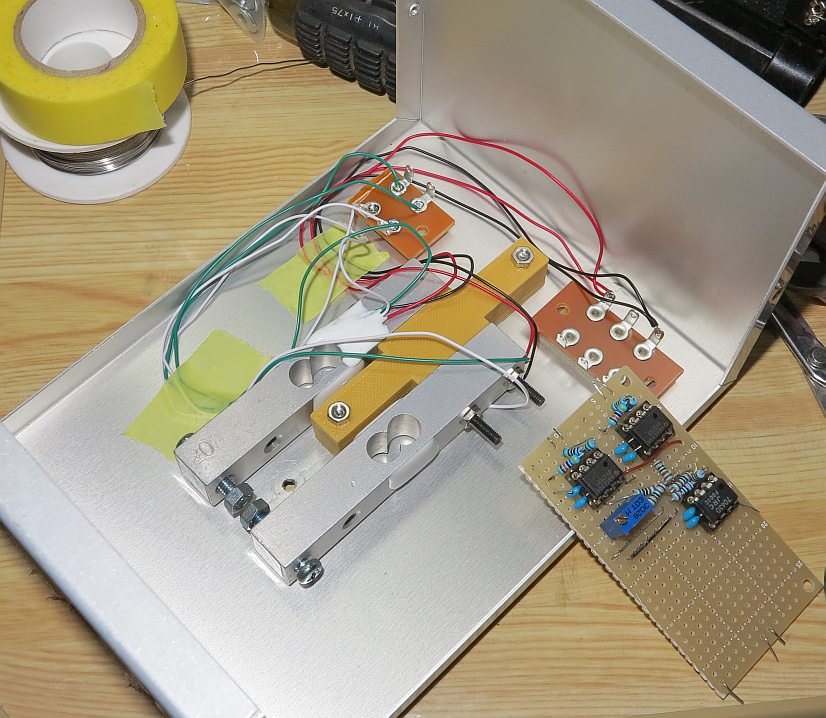
 2段目は、NJU7043Dだと、ちょっとした電圧オーバーで飛ぶので、NJM13404Dにしました。
(21/01/09:追記:2段目にはマイナス電源では無く、GNDとの単電源を使う対処法があるのでそちらの方が良い。MMJOY2のボードへマイナス電圧が入らないから。)
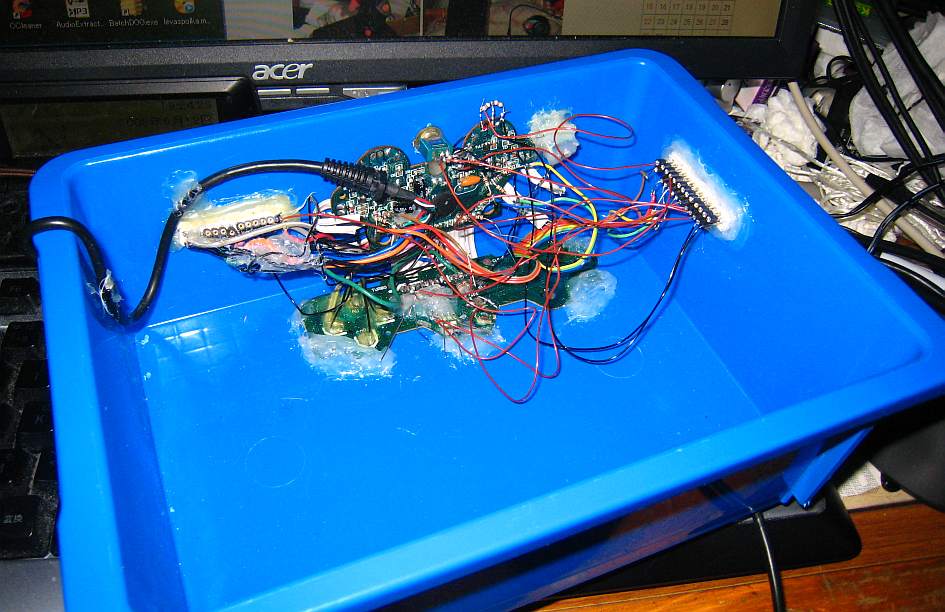
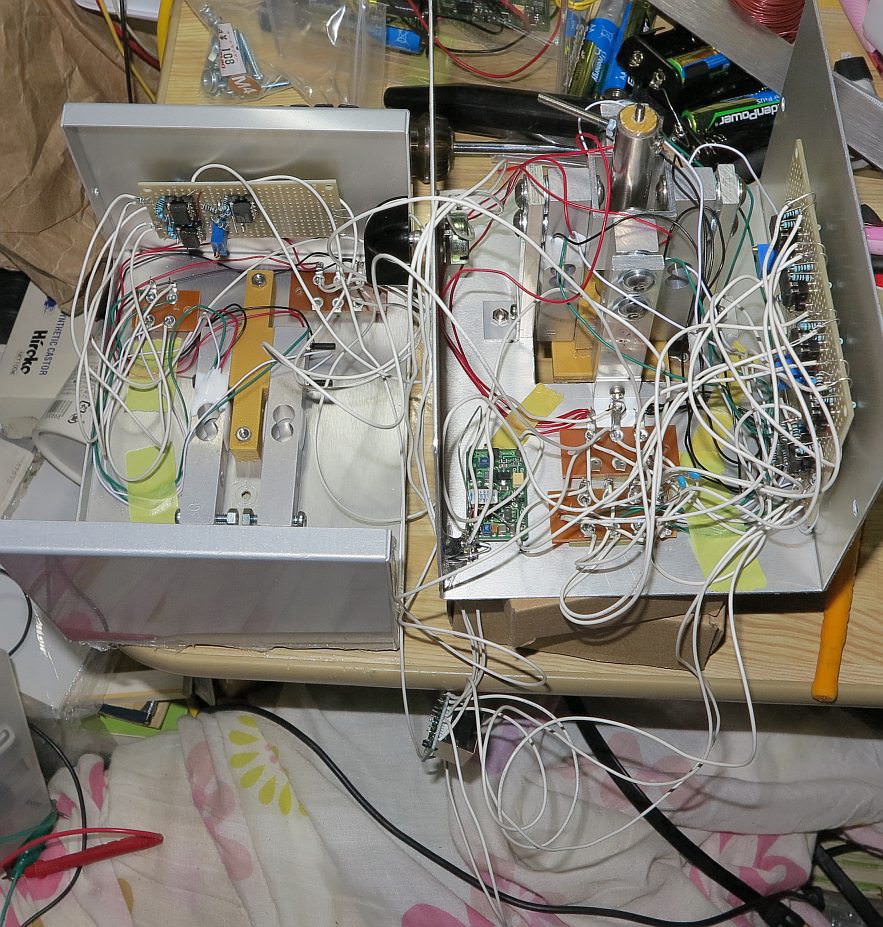
これを組みました。
結構ごちゃごちゃしてますね。
2段目は、NJU7043Dだと、ちょっとした電圧オーバーで飛ぶので、NJM13404Dにしました。
(21/01/09:追記:2段目にはマイナス電源では無く、GNDとの単電源を使う対処法があるのでそちらの方が良い。MMJOY2のボードへマイナス電圧が入らないから。)
これを組みました。
結構ごちゃごちゃしてますね。
 これを直接プロポに繋ぎます。
で、ラダーは完成してないのですが、E010を飛ばしてみました。
これを直接プロポに繋ぎます。
で、ラダーは完成してないのですが、E010を飛ばしてみました。
 圧力でちゃんとコントロール出来ました。
ちょっと出力が弱いというか、筐体が軽いので下に重りなどが必要かも。
感度を倍にしました。2段目についてる1KΩを500Ωにしたです。
ただ、ラダーは、その必要性が無いようです。
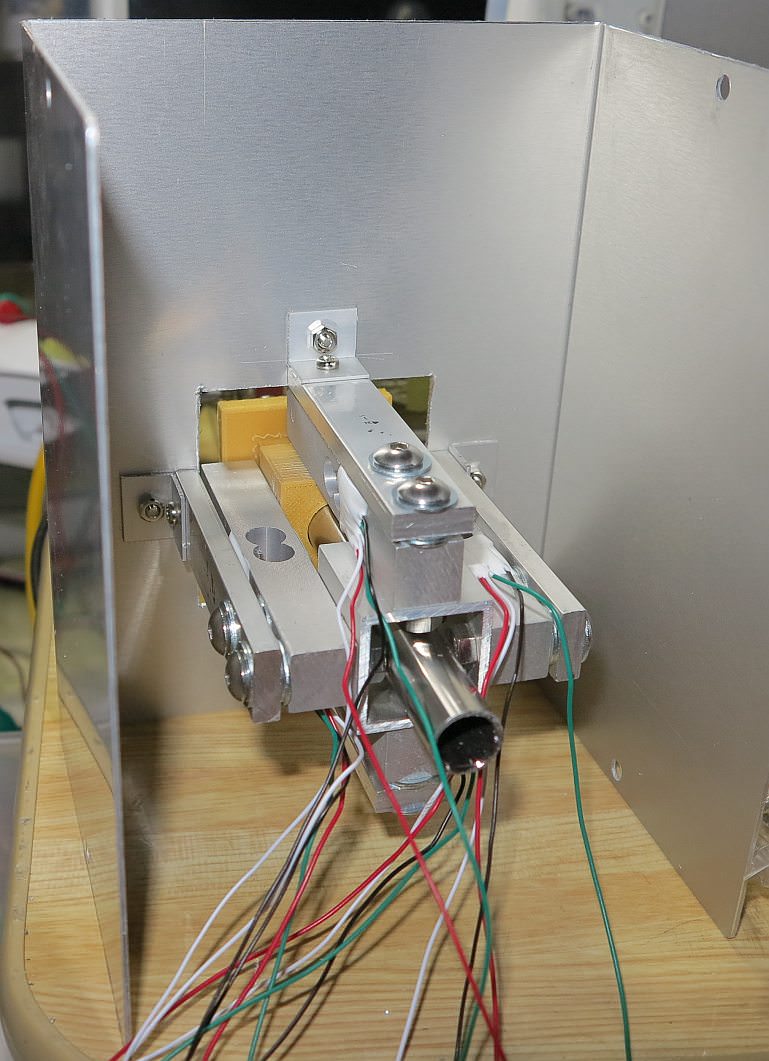
ラダー部、
まずは、ロードセルを組み込む。
圧力でちゃんとコントロール出来ました。
ちょっと出力が弱いというか、筐体が軽いので下に重りなどが必要かも。
感度を倍にしました。2段目についてる1KΩを500Ωにしたです。
ただ、ラダーは、その必要性が無いようです。
ラダー部、
まずは、ロードセルを組み込む。
 全部配線した感じの図。
あとは、コネクタのケースへの固定のみ?
全部配線した感じの図。
あとは、コネクタのケースへの固定のみ?
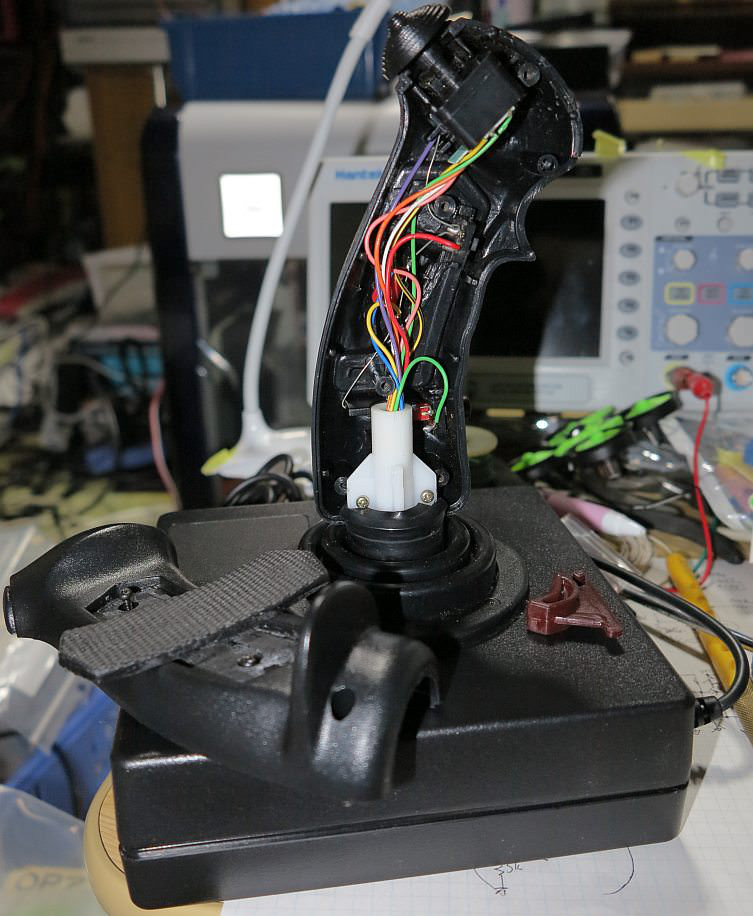
 スティックを付けました。
ジョイントが長いので、こんな感じに…。
スティックを付けました。
ジョイントが長いので、こんな感じに…。
 まあ、もっと短いVerも作って差し替えることは簡単に出来ますので、まあ、イイでしょう。
で、試験飛行。
今度は感度が高いですが、プロポ側のD/Rでどうとでもなります。
感圧型は、操縦桿が動かないので、摩耗とか、ネジの緩み、断線とか起こりにくいと思います。
で、試験飛行。
操縦桿の欠点である切り返しののろさが、ものすごい素早いことになっています。
とくに、操縦桿を戻す際の当て舵を強く当てすぎてしまう傾向がでました。
中点からズレた操作は得意かどうかは判らないです。
次は、
十分調整してFPVに挑戦してみたいです。
コネクタの組み込みと、ノイズ除去
ノイズは、オシロで確認するに3.85KHzあたり振幅500mVとそれなり。
でも、実際にはなまってそれほど影響しないが、A/D変換時のエイリアスが出るようで、
ピクつくときも。
で、振動は1段目で出てるのですが、2段目の10KΩに1μFを併設して除去できます。
気になるなら、1段目の510KΩにも0.022μFくらいを併設すれば。
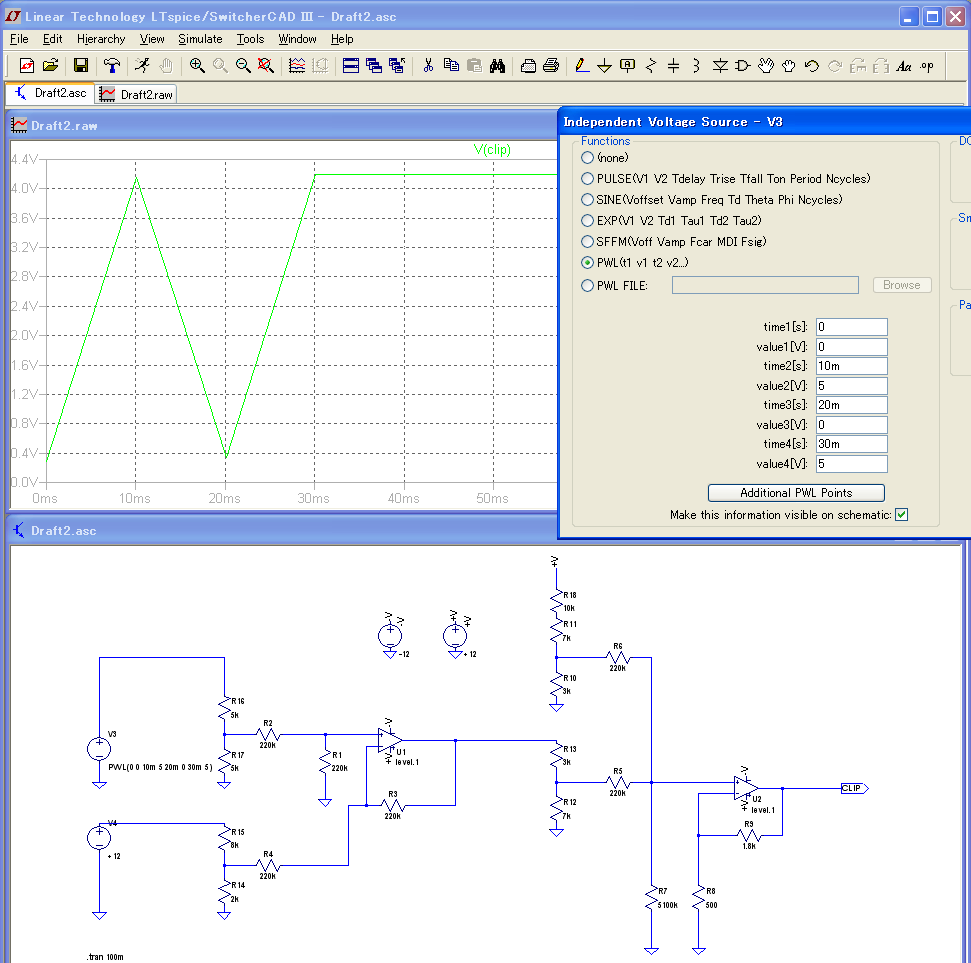
最終な回路。
まあ、もっと短いVerも作って差し替えることは簡単に出来ますので、まあ、イイでしょう。
で、試験飛行。
今度は感度が高いですが、プロポ側のD/Rでどうとでもなります。
感圧型は、操縦桿が動かないので、摩耗とか、ネジの緩み、断線とか起こりにくいと思います。
で、試験飛行。
操縦桿の欠点である切り返しののろさが、ものすごい素早いことになっています。
とくに、操縦桿を戻す際の当て舵を強く当てすぎてしまう傾向がでました。
中点からズレた操作は得意かどうかは判らないです。
次は、
十分調整してFPVに挑戦してみたいです。
コネクタの組み込みと、ノイズ除去
ノイズは、オシロで確認するに3.85KHzあたり振幅500mVとそれなり。
でも、実際にはなまってそれほど影響しないが、A/D変換時のエイリアスが出るようで、
ピクつくときも。
で、振動は1段目で出てるのですが、2段目の10KΩに1μFを併設して除去できます。
気になるなら、1段目の510KΩにも0.022μFくらいを併設すれば。
最終な回路。
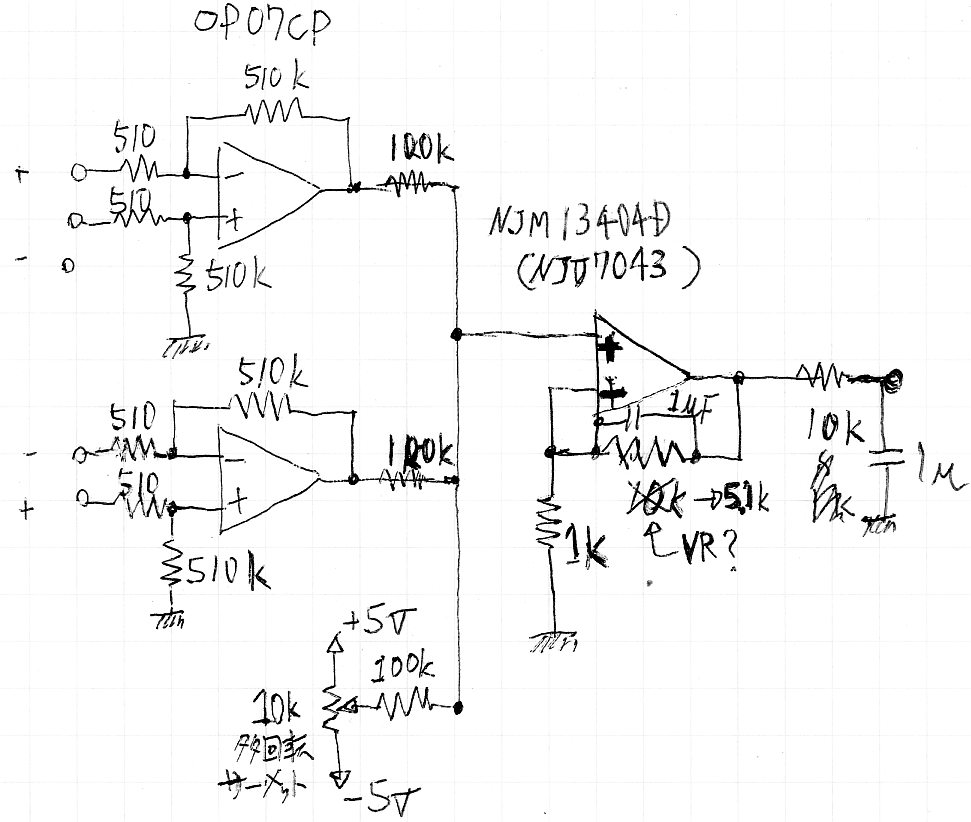 二段目の帰還は10KΩでその倍率比の対象が510Ωとなってるはず。
2段目は、LMC662CNにした方が良かったです。
(210109:追記:2段目は、マイナス電源を使わず、GNDとの単電源で使用する。)
FPVは難しかったです。
D/Rを40%まで落としてなんとか飛びますが、
無意識に力を入れて居るとこもあるようで、勝手に走り出してる感じです。
コントローラーが移動しないのはソコが難点かも。
慣れなのか、調整次第なのか、やっぱヘリには向いてないのか?
でも、F-35は感圧式だとか?
ノイズを除去し、センターなどを調整したら、かなり楽になったので
また試して見ようと思います。
+++++++++++++++++++++++++
ここで、PCのジョイスティックも使える様に考えます。
15PIN-USBアダプタはボタンの数が限られてるので、HOTASは無理だと思います。
で、簡易には、Joyパッドを分解してもイイですが、Bitが粗く、
反転やその他出来ないことが多いです。
そこで、メジャーと思えるこの二つ。
二段目の帰還は10KΩでその倍率比の対象が510Ωとなってるはず。
2段目は、LMC662CNにした方が良かったです。
(210109:追記:2段目は、マイナス電源を使わず、GNDとの単電源で使用する。)
FPVは難しかったです。
D/Rを40%まで落としてなんとか飛びますが、
無意識に力を入れて居るとこもあるようで、勝手に走り出してる感じです。
コントローラーが移動しないのはソコが難点かも。
慣れなのか、調整次第なのか、やっぱヘリには向いてないのか?
でも、F-35は感圧式だとか?
ノイズを除去し、センターなどを調整したら、かなり楽になったので
また試して見ようと思います。
+++++++++++++++++++++++++
ここで、PCのジョイスティックも使える様に考えます。
15PIN-USBアダプタはボタンの数が限られてるので、HOTASは無理だと思います。
で、簡易には、Joyパッドを分解してもイイですが、Bitが粗く、
反転やその他出来ないことが多いです。
そこで、メジャーと思えるこの二つ。
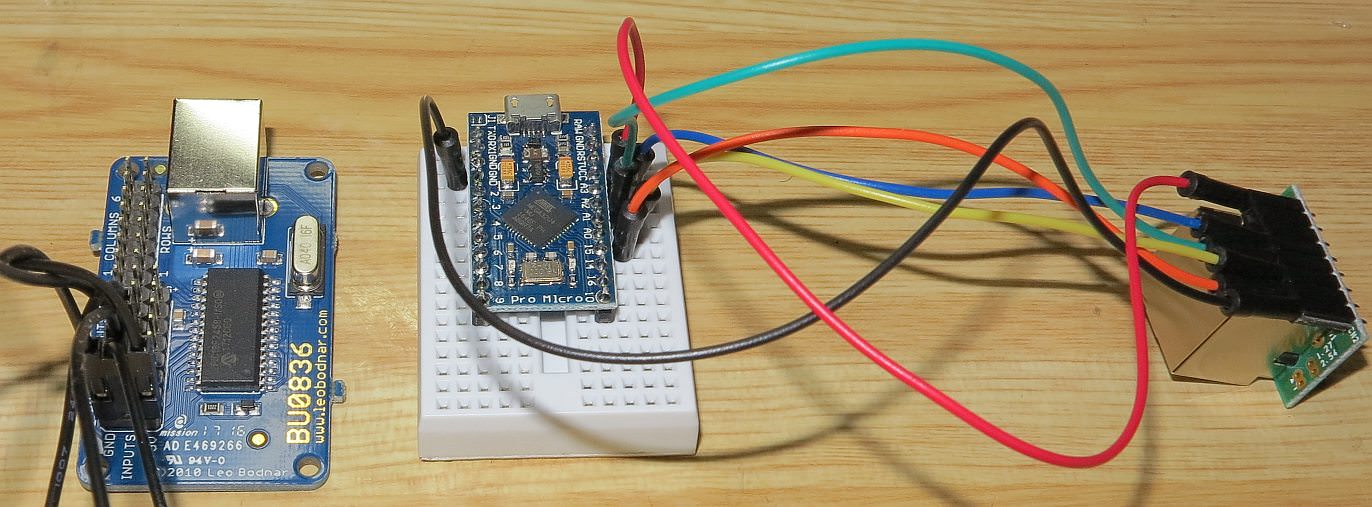 ・BU0836A
・MMJoy2
この手の物は、他にもありますが、無理する必要も無し。
まず値段と取り寄せやすさですが、
BU0836はイギリスから購入します。
本体の値段もポンドですが今は3500円位に相当します。
AirMailなら安めの送料ですが、FedExを使いましたので、結構な値段になりました。
その代わり、注文から3日で届きました。
半月以上経ったいまごろ取り出して使ってるので意味不明な感じでした。
MMJoy2は、マイコンであるAruduinoProMicro互換品を書き換えて使います。
国内でも売られてますし、中国のは500円位であります。
BU0836はまず、扱いは簡単です。
感度も調整できますし、これで満足しても良いかと思います。
センサーなどへの電流も稼げるようです。
LCというのはロードセル用で、主に車のペダルに使うようです。
MMJoy2は、相当に細かい設定や、スイッチがダイオードマトリクス接続なことはBU0836と変わらないですが、
ボタン数が多く出来るなどあります。けど、それにはかなりイロイロ技術や部品が必要なので、基本仕様で扱うことにすると思われます。
ソフトウェアの初期設定がとにかく大変、
いろんなセンサーにも対応してます。大抵のモノには電流も事足りる感じです。
あと、カーブの設定や、ユニット一つ一つに名称を付けて区別することも出来ます。
で設定で相当苦労しました。
Win7ナゼかドライバが入らず。
Win10ではドライバの名前が変わってるようだが、OK。
しかし、FWの書き込みが出来ない。
イロイロ弄って、原因はhexの入ってるフォルダへのパスは日本語ダメというコトが判明。
リセットしてからデバイスマネージャーを見ながら8秒以内にFWを書き換えるのですが、自動で書き換え開始に設定。
設定をするとき、USBデバイスをクリックして、横のジョイスティックの絵の赤部分が青になると、
デバイスに設定を書き込める。
あと、設定してもデータが動かないのに悩まされました。
理由が、「Spark fun」 という互換品のためか、
基板のシルク印刷と設定画面での端子の文字が違う。
追い詰めて、コレしかないと言うことになりましたが、
ネットに資料の図がありますので…、
アナログchを繋いで箱に入れると、こんな感じ。
・BU0836A
・MMJoy2
この手の物は、他にもありますが、無理する必要も無し。
まず値段と取り寄せやすさですが、
BU0836はイギリスから購入します。
本体の値段もポンドですが今は3500円位に相当します。
AirMailなら安めの送料ですが、FedExを使いましたので、結構な値段になりました。
その代わり、注文から3日で届きました。
半月以上経ったいまごろ取り出して使ってるので意味不明な感じでした。
MMJoy2は、マイコンであるAruduinoProMicro互換品を書き換えて使います。
国内でも売られてますし、中国のは500円位であります。
BU0836はまず、扱いは簡単です。
感度も調整できますし、これで満足しても良いかと思います。
センサーなどへの電流も稼げるようです。
LCというのはロードセル用で、主に車のペダルに使うようです。
MMJoy2は、相当に細かい設定や、スイッチがダイオードマトリクス接続なことはBU0836と変わらないですが、
ボタン数が多く出来るなどあります。けど、それにはかなりイロイロ技術や部品が必要なので、基本仕様で扱うことにすると思われます。
ソフトウェアの初期設定がとにかく大変、
いろんなセンサーにも対応してます。大抵のモノには電流も事足りる感じです。
あと、カーブの設定や、ユニット一つ一つに名称を付けて区別することも出来ます。
で設定で相当苦労しました。
Win7ナゼかドライバが入らず。
Win10ではドライバの名前が変わってるようだが、OK。
しかし、FWの書き込みが出来ない。
イロイロ弄って、原因はhexの入ってるフォルダへのパスは日本語ダメというコトが判明。
リセットしてからデバイスマネージャーを見ながら8秒以内にFWを書き換えるのですが、自動で書き換え開始に設定。
設定をするとき、USBデバイスをクリックして、横のジョイスティックの絵の赤部分が青になると、
デバイスに設定を書き込める。
あと、設定してもデータが動かないのに悩まされました。
理由が、「Spark fun」 という互換品のためか、
基板のシルク印刷と設定画面での端子の文字が違う。
追い詰めて、コレしかないと言うことになりましたが、
ネットに資料の図がありますので…、
アナログchを繋いで箱に入れると、こんな感じ。
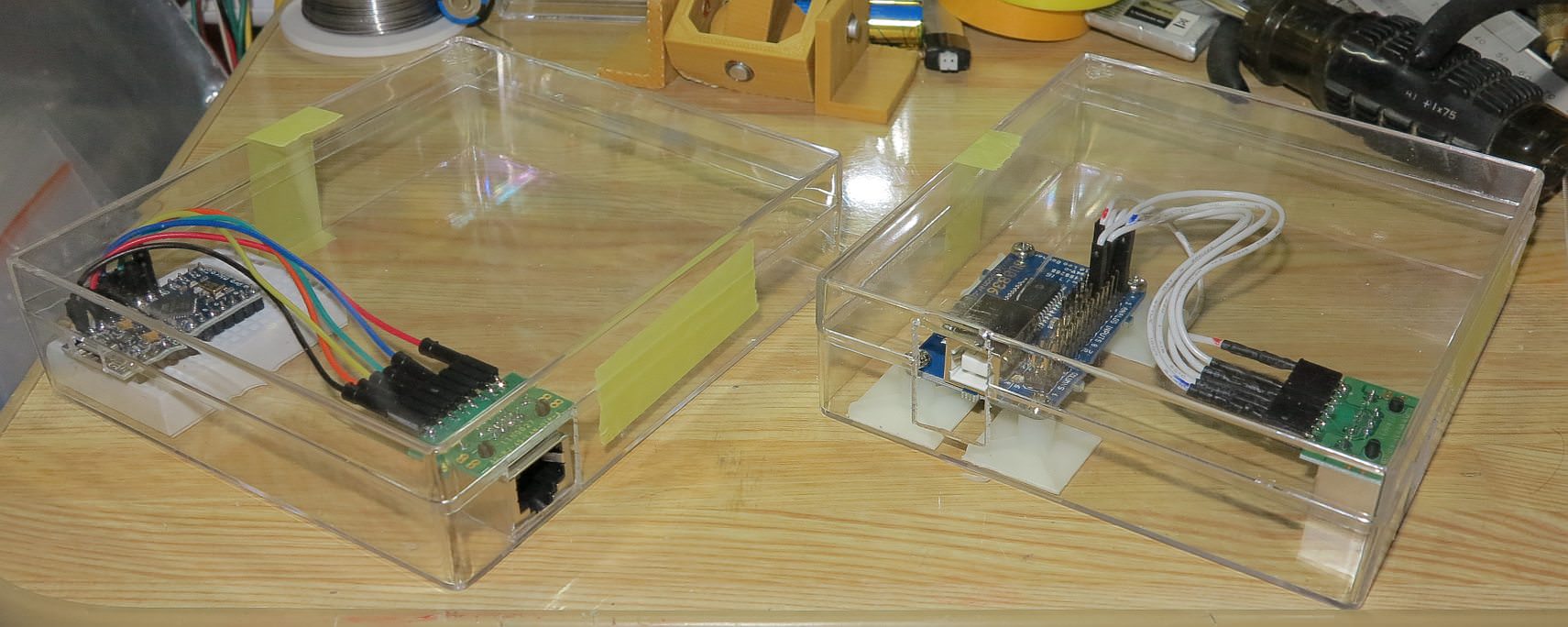 デジタルは、15ピンのD-Subコネクタにする予定。
※210112追記>
ファームウェアの入れ方。
そのままだと、hexファイルのアドレスの両端に"が付いてないのでコマンド画面が一瞬で画面が消える。
ファイラーで指定してやるとOKみたい。
あと、デバイスモニタで見てると、Arduinoをリセットして、暫くしてCOMポートが出て、8秒以内に消えてまた出てくる。
この二つのポートの番号が違う。ので、ドツボにはまる。手前のポート番号を記入し。
リセットピンをGNDに落とし、自動で書き込みをONにしておいてから、ピンを抜く。
するとちゃんと書き換えられる。
最初に出たのはブートローダーモードのポートで、次に出るのがArduinoのポートと言うことらしいです。
+++++++++++++++++++++++++
当初金属を予定していたのですが、
思い切って、ジンバルのアームを全てABS樹脂にすることに。
バリとりは、長いネジで。
デジタルは、15ピンのD-Subコネクタにする予定。
※210112追記>
ファームウェアの入れ方。
そのままだと、hexファイルのアドレスの両端に"が付いてないのでコマンド画面が一瞬で画面が消える。
ファイラーで指定してやるとOKみたい。
あと、デバイスモニタで見てると、Arduinoをリセットして、暫くしてCOMポートが出て、8秒以内に消えてまた出てくる。
この二つのポートの番号が違う。ので、ドツボにはまる。手前のポート番号を記入し。
リセットピンをGNDに落とし、自動で書き込みをONにしておいてから、ピンを抜く。
するとちゃんと書き換えられる。
最初に出たのはブートローダーモードのポートで、次に出るのがArduinoのポートと言うことらしいです。
+++++++++++++++++++++++++
当初金属を予定していたのですが、
思い切って、ジンバルのアームを全てABS樹脂にすることに。
バリとりは、長いネジで。

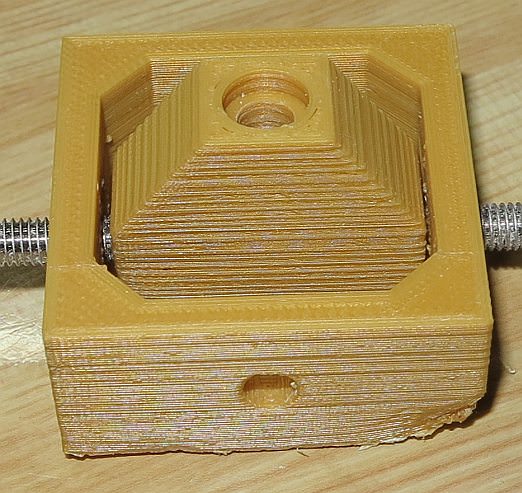 SolidWorksってなんだかいびつなソフトな感じがしてモノすっごく苦痛でしたw
もうちょっと大きく作った方が良い感じもしますが、
ラフトが定着せず浮き上がったのか、ゆがんでるとこがありますが、
機能上全く問題が無いので気になりますが、
とりあえず作って見ることに、
フィラメント送りのギヤ部分が汚れてきたからか、
ちょっと段が出来てますね。
樹脂へ使用できるネジ止め剤でアルミシャフトとベアリングを固定。
太く短いので、シャフトもABSとか樹脂でも可能かも。
SolidWorksってなんだかいびつなソフトな感じがしてモノすっごく苦痛でしたw
もうちょっと大きく作った方が良い感じもしますが、
ラフトが定着せず浮き上がったのか、ゆがんでるとこがありますが、
機能上全く問題が無いので気になりますが、
とりあえず作って見ることに、
フィラメント送りのギヤ部分が汚れてきたからか、
ちょっと段が出来てますね。
樹脂へ使用できるネジ止め剤でアルミシャフトとベアリングを固定。
太く短いので、シャフトもABSとか樹脂でも可能かも。
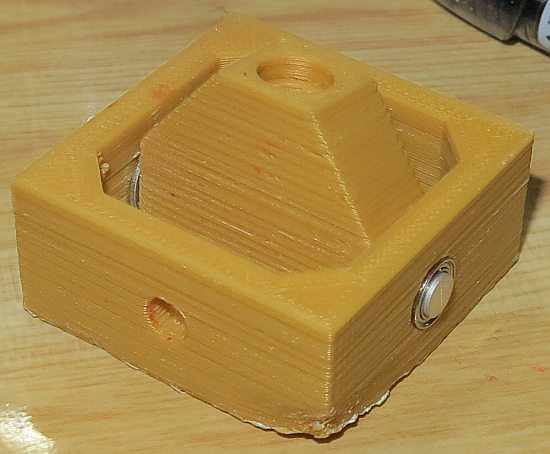 ワッシャーがはめてあるのですが、ちょっとキツいので、ペーパーがけしておけば良かったと思いました。
テフロングリスをドライテフロンスプレーで流し込みました。
横も付けて…、
ワッシャーがはめてあるのですが、ちょっとキツいので、ペーパーがけしておけば良かったと思いました。
テフロングリスをドライテフロンスプレーで流し込みました。
横も付けて…、
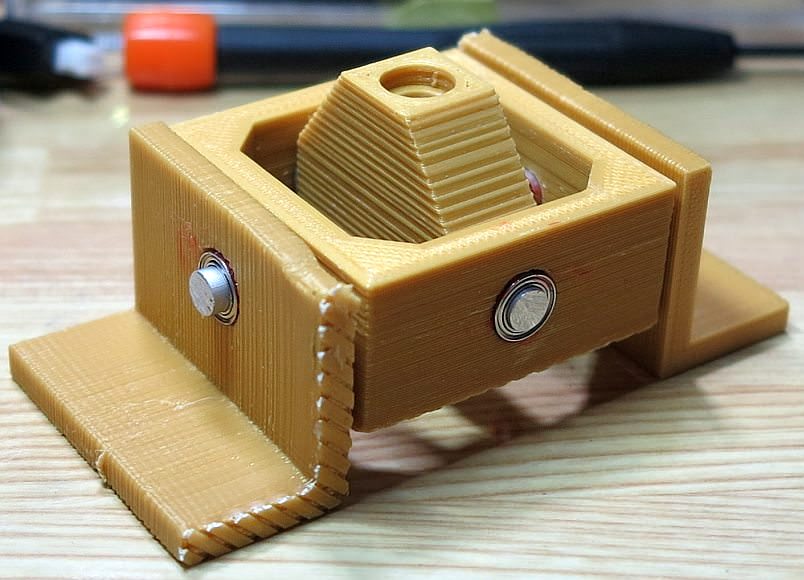 カドを落とした円盤を付けました。
カドを落とした円盤を付けました。
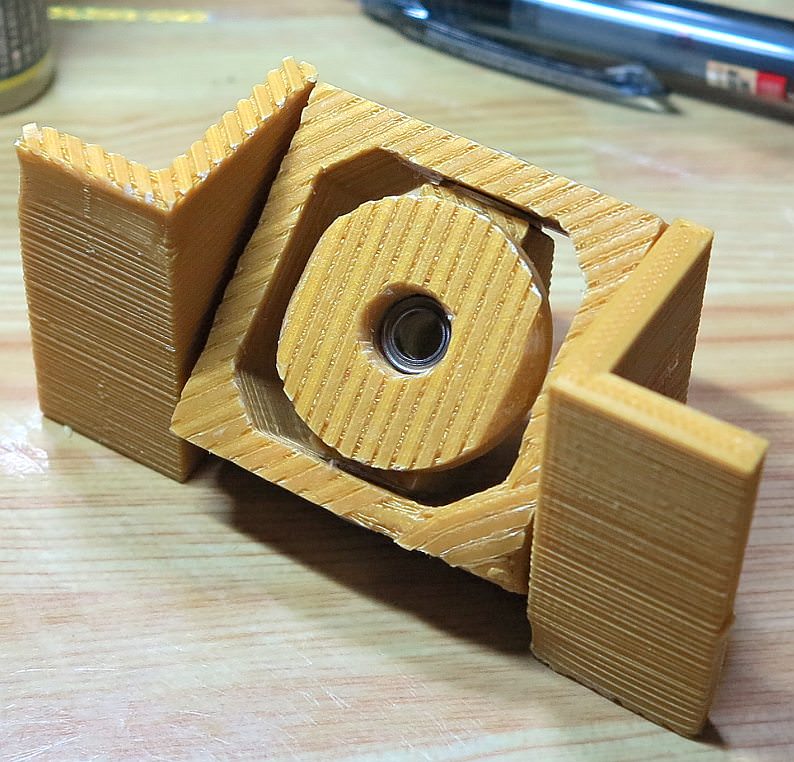 アクリルと思われるモノを切ってみたが、
案の定割れていく…、
アクリルと思われるモノを切ってみたが、
案の定割れていく…、
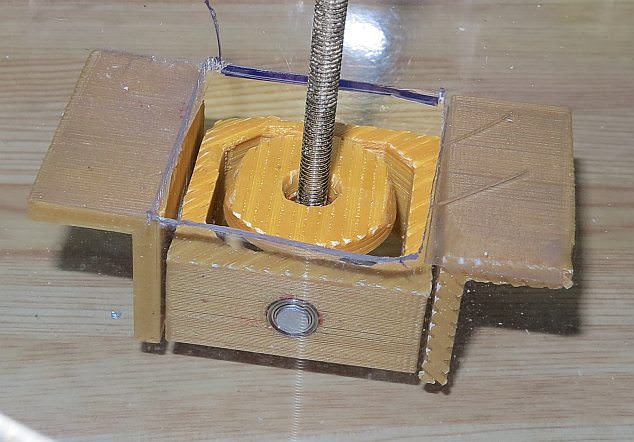 両面テープで様子見してる感じですが、
厚めのポリカーボネートにしたいと思います。
円盤にバネで下側に押して、センターリターンさせたいのですが、
軸からズレてるため、円盤が水平方向に動きすぎる。
実験版のつもりなので、
いつか、改良版を作るなら、もうちょっと低くしたいです。
+++++++++++++++++++++++++
FPVなシミュレーターゲーム「Liftoff」を購入。挙動はちょっと違和感があるので、Heli-Xよりはマシ。
で、操縦桿で飛ばす。
FCSのホール素子なハイセンターだとある程度制御できます。
感圧式では、まともに飛ばない…
良く見て見るにやっぱ感圧式の感度が高すぎるので1/2に戻しました。
これでもゲームではあまりマトモに飛ばないですが、
実機なE010では結構マトモに飛ぶようになりました。
ジョイスティックでは、
レールTOレールなフルスイングじゃないと、キャリブレーションでセンターがズレるですので、
2段目のOP-AMPの種類を変えようと思います。
↓
LMC662CNにしました。
キャリブレーションのセンターの問題はBU0836では、かなり悩まされますが、
MMJoy2では、殆ど問題になりません。
なので、トリムを付けてない場合は、MMJoy2がオススメです。
センターが出ないのは、多分、BU0836の機能の問題より、リニアリティーの問題では無いかな?という思いもあります。
というのも、ドライバだけで無く、ソフト側でキャリブレーションしてもどうにも上手くない気がするのです。
両面テープで様子見してる感じですが、
厚めのポリカーボネートにしたいと思います。
円盤にバネで下側に押して、センターリターンさせたいのですが、
軸からズレてるため、円盤が水平方向に動きすぎる。
実験版のつもりなので、
いつか、改良版を作るなら、もうちょっと低くしたいです。
+++++++++++++++++++++++++
FPVなシミュレーターゲーム「Liftoff」を購入。挙動はちょっと違和感があるので、Heli-Xよりはマシ。
で、操縦桿で飛ばす。
FCSのホール素子なハイセンターだとある程度制御できます。
感圧式では、まともに飛ばない…
良く見て見るにやっぱ感圧式の感度が高すぎるので1/2に戻しました。
これでもゲームではあまりマトモに飛ばないですが、
実機なE010では結構マトモに飛ぶようになりました。
ジョイスティックでは、
レールTOレールなフルスイングじゃないと、キャリブレーションでセンターがズレるですので、
2段目のOP-AMPの種類を変えようと思います。
↓
LMC662CNにしました。
キャリブレーションのセンターの問題はBU0836では、かなり悩まされますが、
MMJoy2では、殆ど問題になりません。
なので、トリムを付けてない場合は、MMJoy2がオススメです。
センターが出ないのは、多分、BU0836の機能の問題より、リニアリティーの問題では無いかな?という思いもあります。
というのも、ドライバだけで無く、ソフト側でキャリブレーションしてもどうにも上手くない気がするのです。
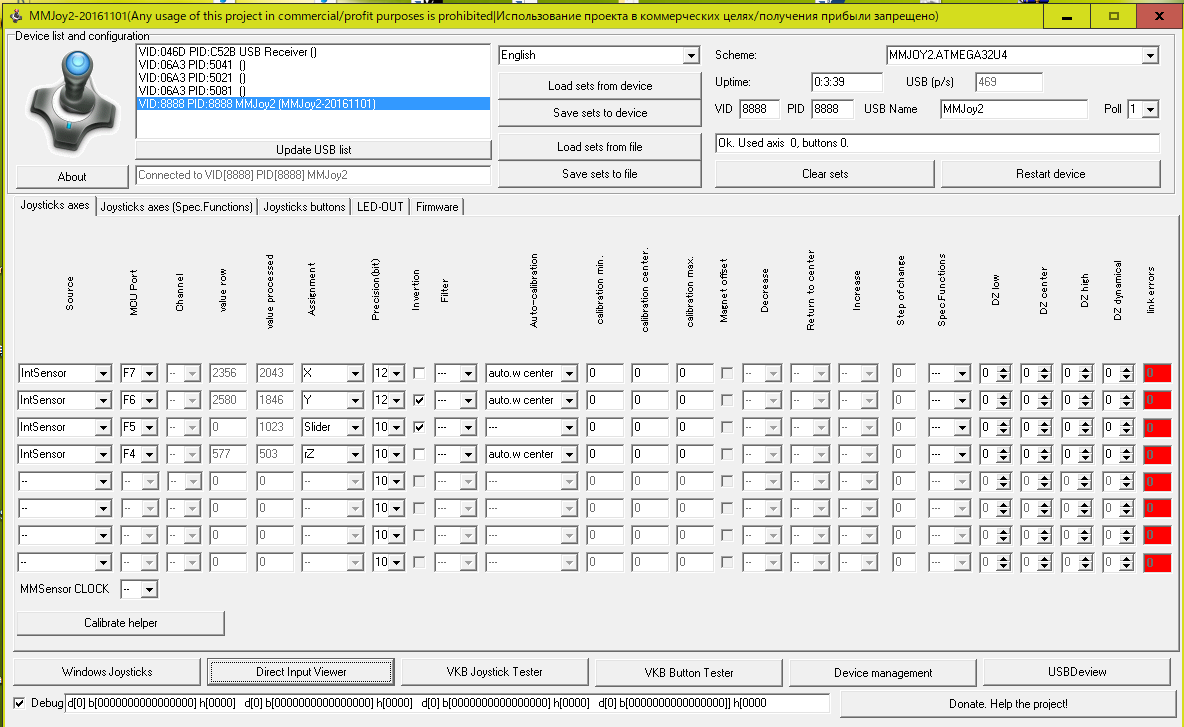 昔のゲームだと、「Z」または「スライダー」はスロットルにアサインされるみたい。
また「rZ」がラダーになる。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
+++++++++++++++++++++++++
高画質版
+++++++++++++++++++++++++
マイコンであるArduinoをジョイスティックのI/Fにする。「MMJoy2」では、
Sparkfunな互換品ではなく、
純正品や端子の多い「Mini」や、
特に、「Arduino Leonardo Pro Micro ATmega32U4 Board」を使ってるヒトも。
これは、値段は700円位と安めで、コネクタも若干丈夫に見えて、ピンヘッダがメスで良いですし、アナログ入力も10〜12と多く、結構利点もありそうです。(MMJOY2のサポートするアナログ入力は8らしい。)
似てるけど、UNOは、CPUなどが違うのでFWが無いと思われるので注意です。
互換性のあるボードで端子数が多いとなると
「Teensy」
というボードのVerが大きいタイプ?のようですが、
電圧とかの制約で「Teensy ++ 2.0」(チップ:MCU AT90USB1286)がイイ?
(単なるTeensy2.0は、チップは32U4のようです。)
MMJoy2が使えるわけなのですが、
他の方法も見かけました。(3DPro32?)
端子が多いのは、手っ取り早いので良いですね。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
他には、
シリアルなデジタルエンコードして入力させる方法もあります。
マイコン付属のアナログ入力端子は、多分、ADCの分解能は10Bit?程度らしいですが、(12Bitも設定は出来る。ある程度滑らかにはなるだろうけど、そのレベルの絶対精度は無さそう。ということ)
アナログ入力した信号が震えるのは、実装技術やアンチエイリアスな積分がいい加減故に発生してるノイズDATAのような気もします。
…が、
高精度にしたいなら「A/D変換用のチップ」を使えば高精度になるとあります。実装には同様気を使うかとは思います。
その際、12Bit8ChのA/Dコンバーターで、マイコンをマスターとして、スレーブなADC2つの接続では入力を16Chまで増やせます。(MCP3208は秋月が安いようです。)
ですが、MMJOY2がサポートしてるのは8入力のような気がしますが。。。。?
ボタンのチャンネルを増やすには「シフトレジスタなチップ」を使う、という方法もあります。
8個のレジスタ(8Bit)のパラレルをシリアル化する感じです。
直列的に増やせますが、ソフト側の対応と、クロックによる遅延があり、シフトレジスタICを12個使用で、128個のボタンの対応が最大らしいです。
古い有線リモンコンなんかが中身がそんな造りだけだったですね。
マトリクスなDiを使わない回路で、片方の端子が共通となるので、RCのプロポと結線を共通化させたりしやすいかも。
また、スティックの握り部分で、端子数をシリアルにエンコードも出来ます。
そして、その後、RCプロポ用にデコードして出すコトも可能そう。
そうすると、デコード部分をプロポに組み込めるとプロポとのケーブルが少なくなりますね。
ある意味、信号が直観的では無くなるので、ややこしい感じもしますが…、、
C-MOSロジックICは静電気に弱いのも悩みますが、
東芝の末尾にAPが付くのは、ちょっと高いですが、Diによる静電気保護がされてます。(74HC165APはマルツにあるようです。)
HATスイッチのスイッチは、実機では通常トリムのようで、本質的に4方向スイッチのようですが、
ゲームの視点入力なら8方向とかアナログ化すると面白いことも。
で、規模が大きくなるので、どうしたモノか迷っております。
+++++++++++++++++++++++++
そういえば、ボタンの多いSaitekのX55でも、HATスイッチ一個、エルロン、エレベーター、ラダー、スロットル2軸(双発用)
以外は、ソフトでキーに置き換えられる構造です。
なので、
基本、4〜5軸アナログとHATスイッチで、ボタンが沢山あって、それを関連付けるJoyToKeyみたいなソフトがあればイイかな?と思います。
あと標準で使えるのは、
フラップやエアブレーキ
Gun発射、ウェポン投下、兵装選択、は良くありますね。
思うのですが、DCSのフライトモデルって、実機より厳しい気がします。
鈍で、旋回率が悪く、すぐに、きりもみ。
難しければリアルというのは無いです。
A-10Cなど、実写画像と比べたり、X-Plane11のF-4より曲がらないし…、
矩形翼でもアルし、
実際は非常に旋回率の高い機体なのですが、
特に低速では、F-16を凌ぐかと思います。
噂では、X65というジョイスティックが感圧式だとか?
思うのですが、感圧式だと多大なGがかかる機体では、
その影響も受けてしまうかんじですよね。
どうなってるのやら?
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
+++++++++++++++++++++++++
で、HATはそのままで残し、他を、シフトレジスターという手もありますが、
悩みどころですね、
で、
参考図はコレなのですが…、
昔のゲームだと、「Z」または「スライダー」はスロットルにアサインされるみたい。
また「rZ」がラダーになる。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
+++++++++++++++++++++++++
高画質版
+++++++++++++++++++++++++
マイコンであるArduinoをジョイスティックのI/Fにする。「MMJoy2」では、
Sparkfunな互換品ではなく、
純正品や端子の多い「Mini」や、
特に、「Arduino Leonardo Pro Micro ATmega32U4 Board」を使ってるヒトも。
これは、値段は700円位と安めで、コネクタも若干丈夫に見えて、ピンヘッダがメスで良いですし、アナログ入力も10〜12と多く、結構利点もありそうです。(MMJOY2のサポートするアナログ入力は8らしい。)
似てるけど、UNOは、CPUなどが違うのでFWが無いと思われるので注意です。
互換性のあるボードで端子数が多いとなると
「Teensy」
というボードのVerが大きいタイプ?のようですが、
電圧とかの制約で「Teensy ++ 2.0」(チップ:MCU AT90USB1286)がイイ?
(単なるTeensy2.0は、チップは32U4のようです。)
MMJoy2が使えるわけなのですが、
他の方法も見かけました。(3DPro32?)
端子が多いのは、手っ取り早いので良いですね。
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
他には、
シリアルなデジタルエンコードして入力させる方法もあります。
マイコン付属のアナログ入力端子は、多分、ADCの分解能は10Bit?程度らしいですが、(12Bitも設定は出来る。ある程度滑らかにはなるだろうけど、そのレベルの絶対精度は無さそう。ということ)
アナログ入力した信号が震えるのは、実装技術やアンチエイリアスな積分がいい加減故に発生してるノイズDATAのような気もします。
…が、
高精度にしたいなら「A/D変換用のチップ」を使えば高精度になるとあります。実装には同様気を使うかとは思います。
その際、12Bit8ChのA/Dコンバーターで、マイコンをマスターとして、スレーブなADC2つの接続では入力を16Chまで増やせます。(MCP3208は秋月が安いようです。)
ですが、MMJOY2がサポートしてるのは8入力のような気がしますが。。。。?
ボタンのチャンネルを増やすには「シフトレジスタなチップ」を使う、という方法もあります。
8個のレジスタ(8Bit)のパラレルをシリアル化する感じです。
直列的に増やせますが、ソフト側の対応と、クロックによる遅延があり、シフトレジスタICを12個使用で、128個のボタンの対応が最大らしいです。
古い有線リモンコンなんかが中身がそんな造りだけだったですね。
マトリクスなDiを使わない回路で、片方の端子が共通となるので、RCのプロポと結線を共通化させたりしやすいかも。
また、スティックの握り部分で、端子数をシリアルにエンコードも出来ます。
そして、その後、RCプロポ用にデコードして出すコトも可能そう。
そうすると、デコード部分をプロポに組み込めるとプロポとのケーブルが少なくなりますね。
ある意味、信号が直観的では無くなるので、ややこしい感じもしますが…、、
C-MOSロジックICは静電気に弱いのも悩みますが、
東芝の末尾にAPが付くのは、ちょっと高いですが、Diによる静電気保護がされてます。(74HC165APはマルツにあるようです。)
HATスイッチのスイッチは、実機では通常トリムのようで、本質的に4方向スイッチのようですが、
ゲームの視点入力なら8方向とかアナログ化すると面白いことも。
で、規模が大きくなるので、どうしたモノか迷っております。
+++++++++++++++++++++++++
そういえば、ボタンの多いSaitekのX55でも、HATスイッチ一個、エルロン、エレベーター、ラダー、スロットル2軸(双発用)
以外は、ソフトでキーに置き換えられる構造です。
なので、
基本、4〜5軸アナログとHATスイッチで、ボタンが沢山あって、それを関連付けるJoyToKeyみたいなソフトがあればイイかな?と思います。
あと標準で使えるのは、
フラップやエアブレーキ
Gun発射、ウェポン投下、兵装選択、は良くありますね。
思うのですが、DCSのフライトモデルって、実機より厳しい気がします。
鈍で、旋回率が悪く、すぐに、きりもみ。
難しければリアルというのは無いです。
A-10Cなど、実写画像と比べたり、X-Plane11のF-4より曲がらないし…、
矩形翼でもアルし、
実際は非常に旋回率の高い機体なのですが、
特に低速では、F-16を凌ぐかと思います。
噂では、X65というジョイスティックが感圧式だとか?
思うのですが、感圧式だと多大なGがかかる機体では、
その影響も受けてしまうかんじですよね。
どうなってるのやら?
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
+++++++++++++++++++++++++
で、HATはそのままで残し、他を、シフトレジスターという手もありますが、
悩みどころですね、
で、
参考図はコレなのですが…、
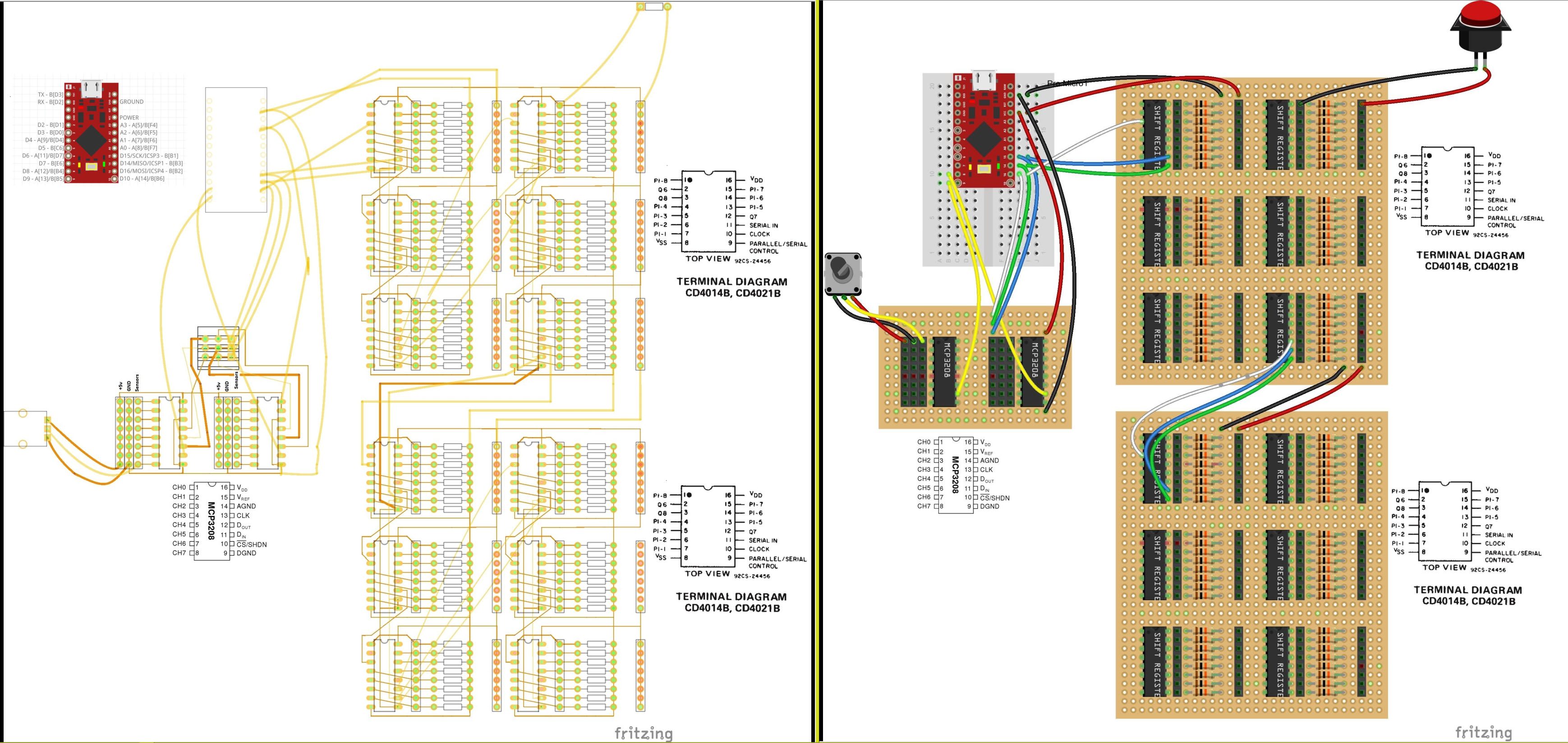 見づらいですが、信号のルールが判ってればいいわけです。
シフトレジスタは直列に12個つながってますが、多分、2〜3個で十分に思います。
おかしな所。
アナログが16ch
この基板での問題は、
まず、
74HC165とピンアサインが違うことと、
各レジスタが、1KΩでLにプルダウンされてて、これをHにするボタンを使用しているが、
10KΩでプルアップしてボタンでLに下げる方法が一般的に思われます。(しかし、電力消費から考えると逆の方が良いという面もありそうです。)
プロポやMMJoy2なソフト側はどうなってるか分からないですが、
マスターであるマイコンの
信号の入出力と同期なクロック、
・Vdd:電源電圧
・Vss:GND
・CK:クロック
・MOSI:マスターOUTスレーブIN
・MISO:マスターINスレーブOUT
端子とつなげます。
MCP3208の基板の上にアルものは、ブレッドボードの一部で、横につながってるという意味です。
+++++++++++++++++++++++++
スティックのグリップ内部に入れる。
配線図を考えました。
見づらいですが、信号のルールが判ってればいいわけです。
シフトレジスタは直列に12個つながってますが、多分、2〜3個で十分に思います。
おかしな所。
アナログが16ch
この基板での問題は、
まず、
74HC165とピンアサインが違うことと、
各レジスタが、1KΩでLにプルダウンされてて、これをHにするボタンを使用しているが、
10KΩでプルアップしてボタンでLに下げる方法が一般的に思われます。(しかし、電力消費から考えると逆の方が良いという面もありそうです。)
プロポやMMJoy2なソフト側はどうなってるか分からないですが、
マスターであるマイコンの
信号の入出力と同期なクロック、
・Vdd:電源電圧
・Vss:GND
・CK:クロック
・MOSI:マスターOUTスレーブIN
・MISO:マスターINスレーブOUT
端子とつなげます。
MCP3208の基板の上にアルものは、ブレッドボードの一部で、横につながってるという意味です。
+++++++++++++++++++++++++
スティックのグリップ内部に入れる。
配線図を考えました。
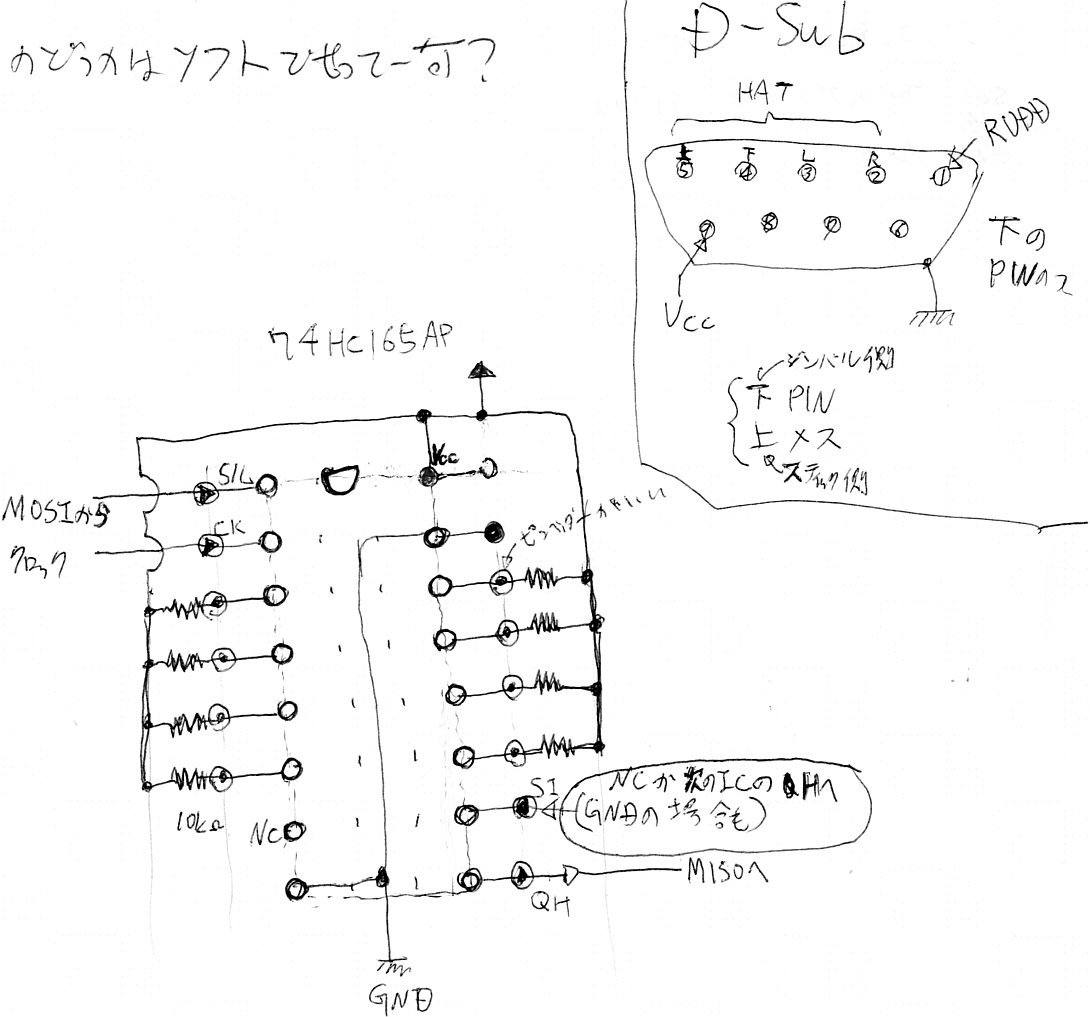 抵抗の横などの入力は、スペースがあったら、ピンヘッダがイイかも。
でも狭いので、大抵IC1〜2個分くらいあるかないか、
SI端子は、ICをシングルで使う時は、GNDに落とすらしいと聞いた感じですが、ホントかな?
とりあえず、あとにICを連結することを考えて、Dサブ端子へ繋ぎます。
SuncomのF-15Eなスティックのグリップ内部は、基板に殆どのスイッチが付いてるのが厄介ですが、
抵抗、ICチップ、コンデンサーを、全部ハズしますと、一番下の大きくて細長いチップの足だった端子ににほぼ全てのスイッチへの端子がまとまります。
ここからシフトレジスタの基板へワイヤリングしてしまえばいいわけです。<とはいえ、新たな基板を入れるスペースが狭くワイヤリングも大変ですが。
部品外しは、ハンダで溶かすのは大変なので、足をニッパーで切ってハズしました。
スイッチは、片方が、マイナス側(GND)で統一されてます。<LEDに関連する一個のスイッチ以外。
こんな感じに組み込める感じ。
抵抗の横などの入力は、スペースがあったら、ピンヘッダがイイかも。
でも狭いので、大抵IC1〜2個分くらいあるかないか、
SI端子は、ICをシングルで使う時は、GNDに落とすらしいと聞いた感じですが、ホントかな?
とりあえず、あとにICを連結することを考えて、Dサブ端子へ繋ぎます。
SuncomのF-15Eなスティックのグリップ内部は、基板に殆どのスイッチが付いてるのが厄介ですが、
抵抗、ICチップ、コンデンサーを、全部ハズしますと、一番下の大きくて細長いチップの足だった端子ににほぼ全てのスイッチへの端子がまとまります。
ここからシフトレジスタの基板へワイヤリングしてしまえばいいわけです。<とはいえ、新たな基板を入れるスペースが狭くワイヤリングも大変ですが。
部品外しは、ハンダで溶かすのは大変なので、足をニッパーで切ってハズしました。
スイッチは、片方が、マイナス側(GND)で統一されてます。<LEDに関連する一個のスイッチ以外。
こんな感じに組み込める感じ。
 しかし、配線は、かなりごちゃっとして大変になるかと思います。。
もうちょっと基板を削って整えて、下の基板の上に固定。
線は、UEW線でいいかなーと、
しかし、配線は、かなりごちゃっとして大変になるかと思います。。
もうちょっと基板を削って整えて、下の基板の上に固定。
線は、UEW線でいいかなーと、
 接続に成功しました。
線は、スズメッキ線で、接触しやすい部分に絶縁ニスを塗りました。
接続に成功しました。
線は、スズメッキ線で、接触しやすい部分に絶縁ニスを塗りました。
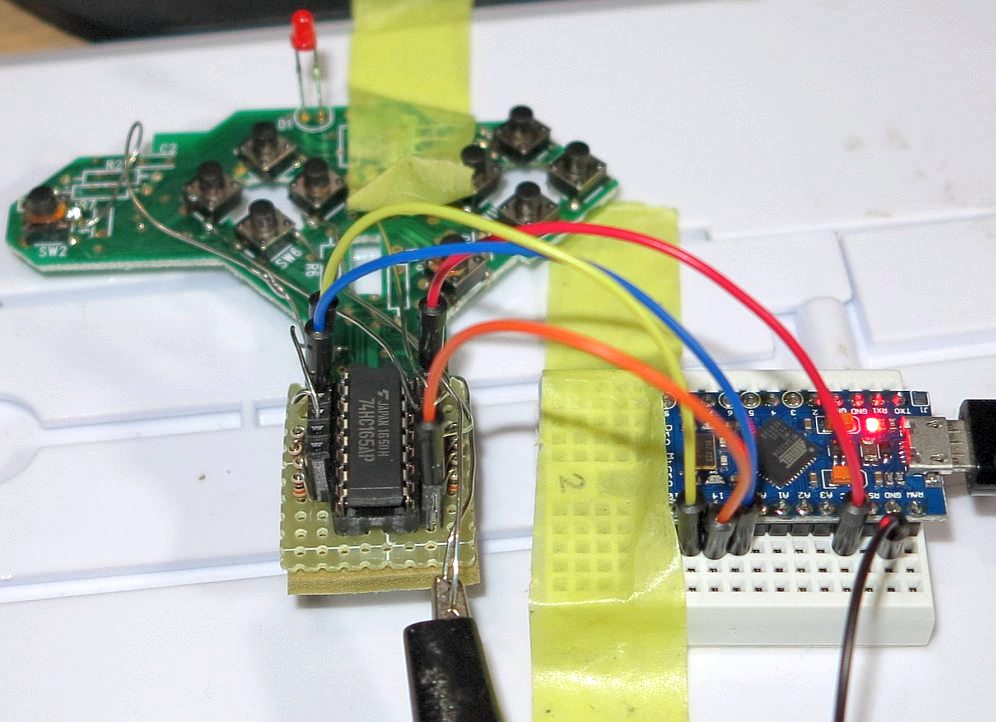 ボタン1を押したとこ。
ボタン1を押したとこ。
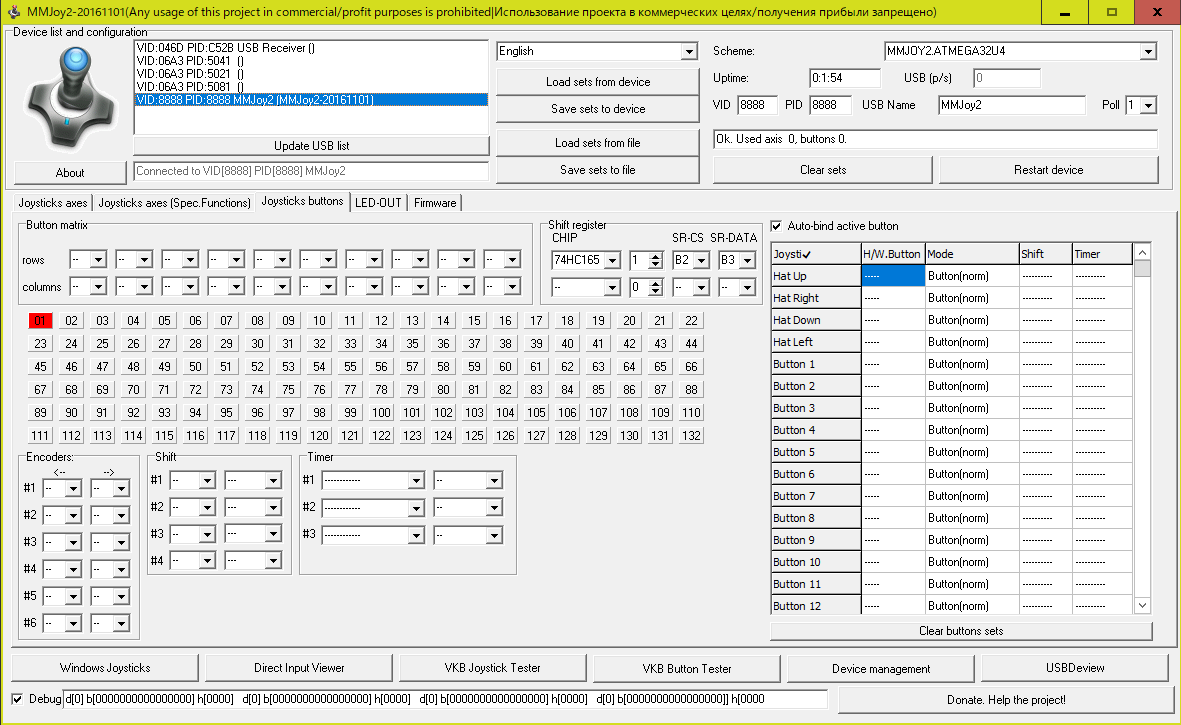 SIはGNDに落とさなくてNC状態でOKでした。
SR-CS:MOSI
SR-DATA:MISO
D-Sub9Pinでは、端子が足りなくって、SIの下流にICを直列に繋ぐことが出来ないですね。
もし、100個以上ボタンを繋ぐようなときは、
電源強化や、プルアップ抵抗をもうちょっと大きくした方が良いかも。33KΩくらいでは普通に動くと思います。
しかし、
これを実際に筐体に入れて配線して組み込むのは骨が折れそうです。
追記>−−−−−−−−−−−−−−−−−−
MMJoy2のフォーラムの全部の77ページ読みました。
XYが読めるホールセンサーに対応してるのでソレを使う記事もありました。
この場合、磁場の強弱では無く、XYの比から三角関数で角度を出す感じです。
でも、RCで使う場合にMMJoy2は使えないので無用の長物ですね。
−−−−−−−−−−−−−−−−−−−−−
それより、
デッドバンドの設定できるプロポやハイニュートラルリターンなジンバルが欲しいところ。
注:
FWを書き換えてるので、
ハードはArduinoですが、中身はAruduinoとは別のモノとなっている感じです。
また通常のAruduino互換として使いたいときはFWを戻す感じです。
多分、「Aruduino、ファームウェア」を検索するとブートローダーについてが殆どなので。
「Arduinoへのファームウェア書き込み」で検索です。
この二つの関係がどうなってるのやら、
「元のファームウェアに戻す場合は
(Arduinoのフォルダ)\hardware\arduino\firmwares\atmegaxxu2\arduino-usbserial
内にあるHEXの中からArduinoにあったものを書き込んでください。
(Arduino-COMBINED-dfu-からはじまるHEXではありません。)」
とあります。
ブートローダーを使って書き換えるので、ブートローダーを書き込みオーバーでダメにしてしまう場合があるとか。
+++++++++++++++++++++++++
円盤を低くして、一体成形品に。
SIはGNDに落とさなくてNC状態でOKでした。
SR-CS:MOSI
SR-DATA:MISO
D-Sub9Pinでは、端子が足りなくって、SIの下流にICを直列に繋ぐことが出来ないですね。
もし、100個以上ボタンを繋ぐようなときは、
電源強化や、プルアップ抵抗をもうちょっと大きくした方が良いかも。33KΩくらいでは普通に動くと思います。
しかし、
これを実際に筐体に入れて配線して組み込むのは骨が折れそうです。
追記>−−−−−−−−−−−−−−−−−−
MMJoy2のフォーラムの全部の77ページ読みました。
XYが読めるホールセンサーに対応してるのでソレを使う記事もありました。
この場合、磁場の強弱では無く、XYの比から三角関数で角度を出す感じです。
でも、RCで使う場合にMMJoy2は使えないので無用の長物ですね。
−−−−−−−−−−−−−−−−−−−−−
それより、
デッドバンドの設定できるプロポやハイニュートラルリターンなジンバルが欲しいところ。
注:
FWを書き換えてるので、
ハードはArduinoですが、中身はAruduinoとは別のモノとなっている感じです。
また通常のAruduino互換として使いたいときはFWを戻す感じです。
多分、「Aruduino、ファームウェア」を検索するとブートローダーについてが殆どなので。
「Arduinoへのファームウェア書き込み」で検索です。
この二つの関係がどうなってるのやら、
「元のファームウェアに戻す場合は
(Arduinoのフォルダ)\hardware\arduino\firmwares\atmegaxxu2\arduino-usbserial
内にあるHEXの中からArduinoにあったものを書き込んでください。
(Arduino-COMBINED-dfu-からはじまるHEXではありません。)」
とあります。
ブートローダーを使って書き換えるので、ブートローダーを書き込みオーバーでダメにしてしまう場合があるとか。
+++++++++++++++++++++++++
円盤を低くして、一体成形品に。
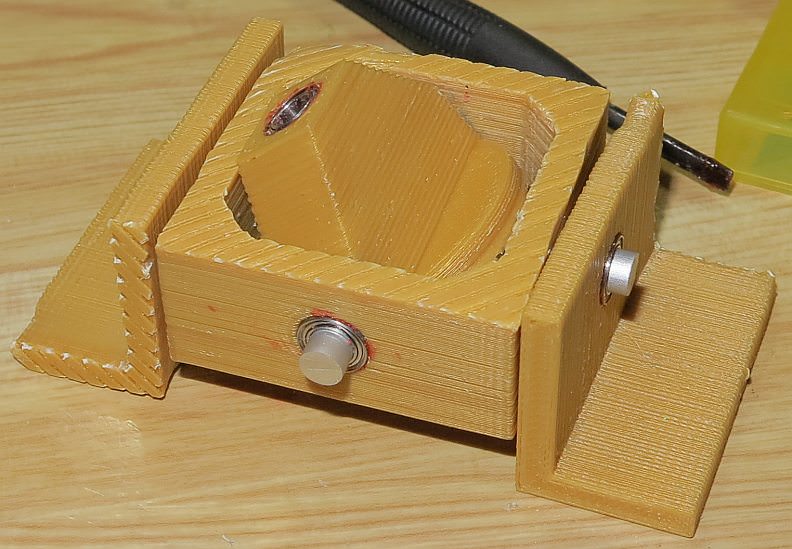
 でも、
バネ、ケーブルを通す軸、ラダー機構とそのリターン
を全て組み込むのは困難…、
反発力のセンターをはっきりさせるには、
傾く平たいモノをバネで押さえつける方式がベストだとは思います。
その点は、プロポも変わらないですね。
ただ、操縦桿ですから、もっと反発力が要るワケです。
+++++++++++++++++++++++++
非常に微弱な電圧変化の段階でのセンサーのオフセットを電源電圧で調節するのはキツい部分もアルのですが、
でも、
バネ、ケーブルを通す軸、ラダー機構とそのリターン
を全て組み込むのは困難…、
反発力のセンターをはっきりさせるには、
傾く平たいモノをバネで押さえつける方式がベストだとは思います。
その点は、プロポも変わらないですね。
ただ、操縦桿ですから、もっと反発力が要るワケです。
+++++++++++++++++++++++++
非常に微弱な電圧変化の段階でのセンサーのオフセットを電源電圧で調節するのはキツい部分もアルのですが、
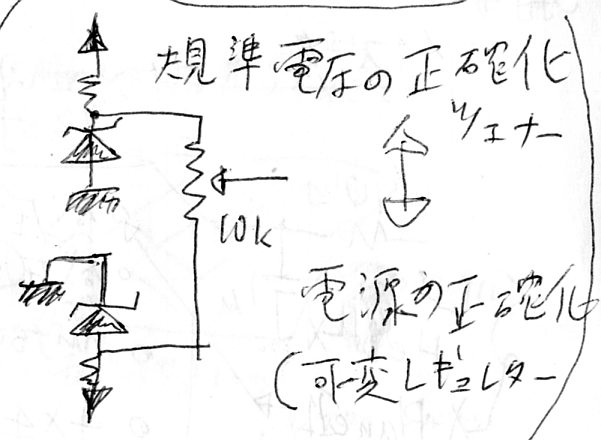 ツェナーダイオードを使うとか、
電源自体を可変にして5.000Vに制御とかいう方法があります。
電源だと可変三端子レギュレターのNJM317とかLM317とかですね。
USBからで4.5仕様なら超低ドロップのNJM2397とかもいいかもですね。
ツェナーダイオードは発熱などにより流す電流(消費電力)には限界があるので、
5Vで供給した場合それより低くなければならないですから、ツェナーは、4.7V〜3.9Vがよく使われる?ようです。
繋ぐ抵抗は1KΩは必要かなー?と思います。
+++++++++++++++++++++++++
ラダーペダル、
ツイストは、クロスコントロールがニガテだとか、、
多分、飛行機ですね。
でも、
Thrustmasterのは大きいので困ってました。
ChPro Pedalsというのがあります。
コンパクトなので目に付きましたChProductのモノは、
業務用も作っていて、耐久性一番をウリにしてるようで、
ウチにアルF-16型のスロットルも三年保証、
スイッチ百万回など書いてあります。
デザインは15Pinな昔から変わらずです。
オークションにて、3000円スタートで、
どこかの転売ショップらしきモノが入札してきて、つり上げたので、
払って良い7000円ぴったりで止まりました。
ツェナーダイオードを使うとか、
電源自体を可変にして5.000Vに制御とかいう方法があります。
電源だと可変三端子レギュレターのNJM317とかLM317とかですね。
USBからで4.5仕様なら超低ドロップのNJM2397とかもいいかもですね。
ツェナーダイオードは発熱などにより流す電流(消費電力)には限界があるので、
5Vで供給した場合それより低くなければならないですから、ツェナーは、4.7V〜3.9Vがよく使われる?ようです。
繋ぐ抵抗は1KΩは必要かなー?と思います。
+++++++++++++++++++++++++
ラダーペダル、
ツイストは、クロスコントロールがニガテだとか、、
多分、飛行機ですね。
でも、
Thrustmasterのは大きいので困ってました。
ChPro Pedalsというのがあります。
コンパクトなので目に付きましたChProductのモノは、
業務用も作っていて、耐久性一番をウリにしてるようで、
ウチにアルF-16型のスロットルも三年保証、
スイッチ百万回など書いてあります。
デザインは15Pinな昔から変わらずです。
オークションにて、3000円スタートで、
どこかの転売ショップらしきモノが入札してきて、つり上げたので、
払って良い7000円ぴったりで止まりました。
 トゥブレーキなるモノが付いてます。
左右のブレーキを独立させたモノで、
飛行機に使われるのでしょうね。
Thrustmasterには付いてない機構ですね。
しかし、改造にはどうしたモノかですね。
切り替えSWでラダー部分のみ引き出せるようにするとイイかも。
ch pro pedals
+++++++++++++++++++++++++
171016
9XRなどのプロポのファームウェアの最新のVerなのですが、
ersky9xProvR221f2
にて、
「USB Joystick now available on Atmel based boards」
とあります。
今後、プロポのUSBインタフェースにジョイスティックを繋げるとジョイスティックで操作ができる時代になりそうですね。
となると、
遊び(デッドバンド)の設定ができないとキツいかもなんて思ってます。
アレですね、スマホのWifiなARDroneなヤツもジョイスティック繋げるようなのがありましたね。
+++++++++++++++++++++++++
180327
久しぶりのついでに作っておきました。
ホールセンサーでも電源電圧を分圧してるのでACアダプタを変えるとオフセットが生じ再度キャリブレーションの原因になったり。
特に、感圧式のロードセルは、操作によって変位する電圧が微量で、それを大きく増幅しております。
よって、電源には、
高精度な電圧を出すことが必要です。
ACアダプタ6Vスイッチング電源から給電して、
5.00Vを出力する可変レギュレター回路です。
(落差の少ない電圧の方が精度が高く、発熱が少ないです。)
外観。
即席ですので、ケーブルの引き回しはテキトーですね。
トゥブレーキなるモノが付いてます。
左右のブレーキを独立させたモノで、
飛行機に使われるのでしょうね。
Thrustmasterには付いてない機構ですね。
しかし、改造にはどうしたモノかですね。
切り替えSWでラダー部分のみ引き出せるようにするとイイかも。
ch pro pedals
+++++++++++++++++++++++++
171016
9XRなどのプロポのファームウェアの最新のVerなのですが、
ersky9xProvR221f2
にて、
「USB Joystick now available on Atmel based boards」
とあります。
今後、プロポのUSBインタフェースにジョイスティックを繋げるとジョイスティックで操作ができる時代になりそうですね。
となると、
遊び(デッドバンド)の設定ができないとキツいかもなんて思ってます。
アレですね、スマホのWifiなARDroneなヤツもジョイスティック繋げるようなのがありましたね。
+++++++++++++++++++++++++
180327
久しぶりのついでに作っておきました。
ホールセンサーでも電源電圧を分圧してるのでACアダプタを変えるとオフセットが生じ再度キャリブレーションの原因になったり。
特に、感圧式のロードセルは、操作によって変位する電圧が微量で、それを大きく増幅しております。
よって、電源には、
高精度な電圧を出すことが必要です。
ACアダプタ6Vスイッチング電源から給電して、
5.00Vを出力する可変レギュレター回路です。
(落差の少ない電圧の方が精度が高く、発熱が少ないです。)
外観。
即席ですので、ケーブルの引き回しはテキトーですね。
 内部はユニバーサル基板で自作ですが、
秋月のキットを改造して使った方が楽です。「USB可変安定化電源モジュールキット(NJM2397使用)」
内部はユニバーサル基板で自作ですが、
秋月のキットを改造して使った方が楽です。「USB可変安定化電源モジュールキット(NJM2397使用)」
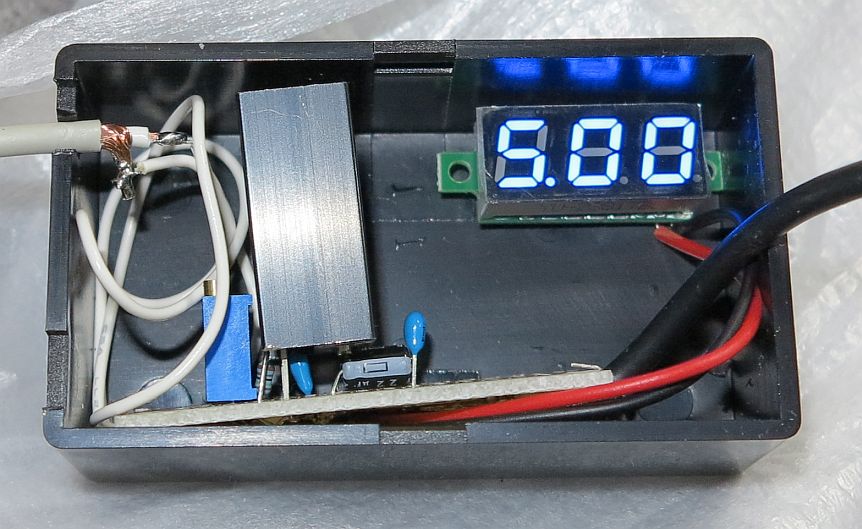
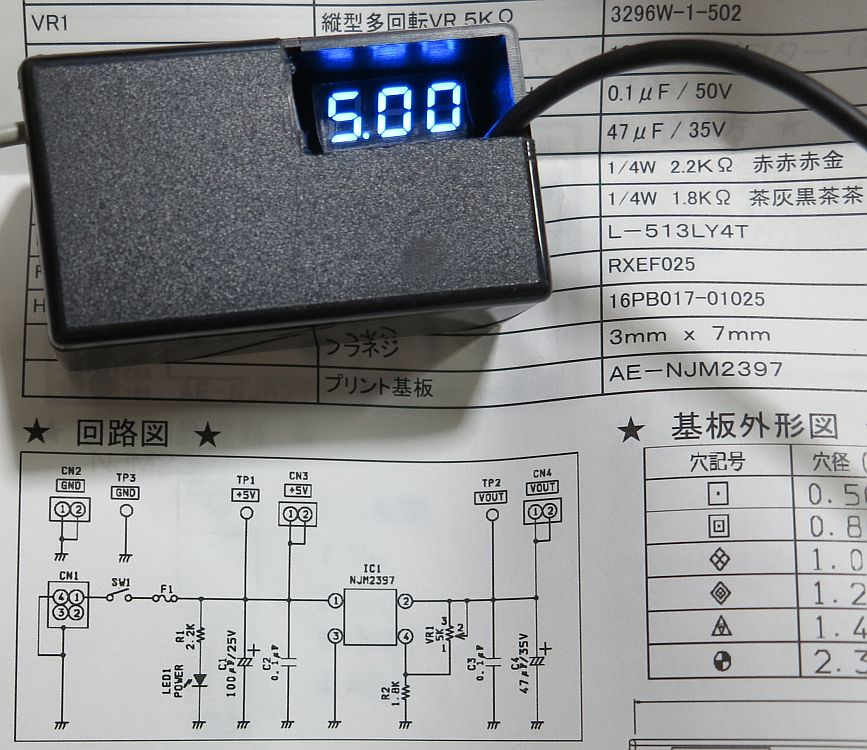 秋月の回路を応用してますが、
規格表の回路と違うのは、制御用リファレンス電圧を作るところですね。
秋月の回路を応用してますが、
規格表の回路と違うのは、制御用リファレンス電圧を作るところですね。
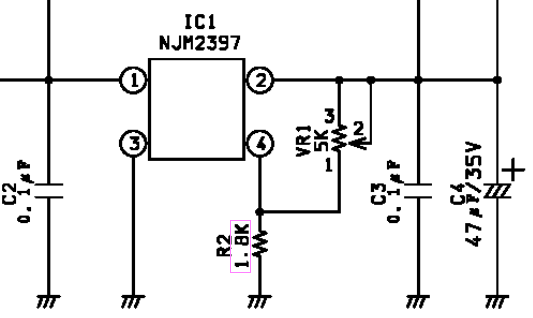 多回転トリマーは、温度補償があった方が良いです。
金属皮膜抵抗は、1.5KΩに変更。(6V入力では、電圧落差が小さい可能性があるため)
実際に使用してみましたが、良く安定しております。
大きい電流が必要な場合は、
絶縁されてるスイッチング電源アダプタを二つ用意して
上記回路を二つ設ければ良いかと思います。
他に、
単一電源から比較的精度を高く中点電圧を求めるのに使える部品として、
「レールスプリッター」というのがあります。
あまり大きな電流は流せないようなので、省電力回路や、回路の一部分限定とかが有効かも。
まあ、あまり中点には流れ無い回路も多いようですが、
+++++++++++++++++++++++++
感圧式の操縦桿再び。
前は、スティックの四方にロードセルを儲けてましたが、
今度は、
スティック自体にかかる力による、微量のゆがみ量を計測してコントロールしようと思ってます。
捻りラダーのモーメント測定は、トルク方向の歪みゲージが一般に販売されてないため、
通常の歪みゲージを45度の角度で二つ貼り付けて代用しようかと思ってますが、
貼り付けが結構難しそう。
ポリエチレン袋で押さえるかな?
スティックの材質は、ABSの予定です。
多回転トリマーは、温度補償があった方が良いです。
金属皮膜抵抗は、1.5KΩに変更。(6V入力では、電圧落差が小さい可能性があるため)
実際に使用してみましたが、良く安定しております。
大きい電流が必要な場合は、
絶縁されてるスイッチング電源アダプタを二つ用意して
上記回路を二つ設ければ良いかと思います。
他に、
単一電源から比較的精度を高く中点電圧を求めるのに使える部品として、
「レールスプリッター」というのがあります。
あまり大きな電流は流せないようなので、省電力回路や、回路の一部分限定とかが有効かも。
まあ、あまり中点には流れ無い回路も多いようですが、
+++++++++++++++++++++++++
感圧式の操縦桿再び。
前は、スティックの四方にロードセルを儲けてましたが、
今度は、
スティック自体にかかる力による、微量のゆがみ量を計測してコントロールしようと思ってます。
捻りラダーのモーメント測定は、トルク方向の歪みゲージが一般に販売されてないため、
通常の歪みゲージを45度の角度で二つ貼り付けて代用しようかと思ってますが、
貼り付けが結構難しそう。
ポリエチレン袋で押さえるかな?
スティックの材質は、ABSの予定です。
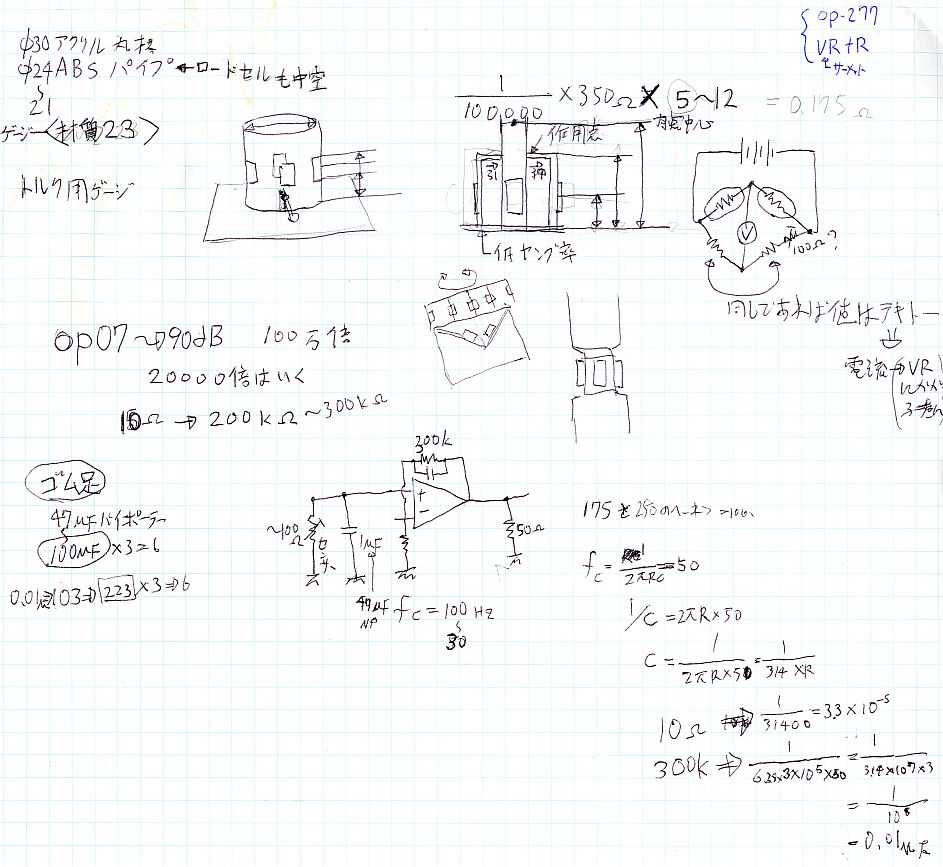 と思って、部品が大体集まったトコなのですが、
なんだか心身がキツイ感じです。
歪みゲージは、ロードセルの中に4つ入ってるのですが、
歪みゲージ単体で買うと、ロードセル1個より高くて…、
貼り付けの失敗を考えると、ちょっと気が重いです。
音楽も弄ってないわけでは無いですので、何か出るかもです。
自分という人物は、何が活動意欲に繋がるかは不明なトコも。
あまり先を考えると、それだけできつくなるけど、
完成しないなんてのも大問題だし。
+++++++++++++++++++++++++
いままで、OP07はFET入力かな?と思ってたのですが、バイポーラーなような?
モノによっては差動入力インピーダンスが標準30KΩとかだと、
10KΩ多回転ポテンショメーターの多用は、いささか数値が高すぎるような気がしました。
なので、一桁下げたら感触がアップするかも?
あと、オフセット防止には、電源の精度もありますが、
感圧ペダルとツイストの切り替えで差が出たりすることもあり得るので、
電源電圧の高精度化やサーメットタイプのポテンショメーターなどもありますが、
オフセットの少ない、OP07CPZの使用が有効だと思いました。
あとは、AruduinoのUSB電源と、リファレンスの+5Vを旨く分けられれば。
+++++++++++++++++++++++++
PS3のコントローラーの修理
何も弄ってないのに、何でか、方向キーや○キーがなど、やたら、コントローラーが操作されるという症状。。
多分接点不良。
で中を空けてみたのですが、昔のと比べて案外簡単に分解できます。
まず、基板の電池のコネクタを外し、
基板のネジを外す。
で、スイッチパネルと基板の接続がの圧着による接触なのですが、銀の方が結構汚れてました。(おそらく基板が炭素とフレキシブル基板が銀メッキ)
これを、両面、接点復活王で拭きまして、結構汚れが付いてきました。
でもって、タミヤの接点グリスを極薄塗りしました。
アナログ端子は、1軸4端子。
昔調べて見るにホールセンサーだったように記憶してます。
この足の半田浮きなどやクラックが懸念されるため、全部ハンダで熱して溶かしておきました。
組み立ても簡単に〜
で、完治しました。
+++++++++++++++++++++++++
++++++++++++++++++++++++++++++++++++++++++++++++++
210103
感圧式操縦桿+MMJOY2再び。
3〜4年経って、また弄りはじめました。
ドローンより、フライトシミュレーターの様な感じです。
最近、フライトモノが復権してる感じがします。
しかもVRで。
HOTAS Warthogで使えるF/A-18Cの操縦桿が魅力的に思ってみた。
が馬鹿高い。で詳細をみるに、
グリップの筐体は金属。
中身は昔のFCSとにた感じ。
インチ規格と思われるバカでかいタクトSWを使ってたりする。(昔のようにネジもインチだったり?)
しかも、内部にICが入っていて、シリアル通信のようです。マイコンかも。
実機は多分スイッチとケーブルのみっぽい。
で、
更なる魔改造を施すべし。とどこかで言われたのですが、やはり値段がうーんと言う…。
まずは、LANケーブルの芯線だと、4軸とボタンのシリアルデータを送るのに線が1本足りない。
そこで、ケーブルの被覆のシールド線だけは独立してると踏んで、被覆のシールドにGNDを移動。故にシールドのあるCat7ケーブル仕様になっている。
と思って、部品が大体集まったトコなのですが、
なんだか心身がキツイ感じです。
歪みゲージは、ロードセルの中に4つ入ってるのですが、
歪みゲージ単体で買うと、ロードセル1個より高くて…、
貼り付けの失敗を考えると、ちょっと気が重いです。
音楽も弄ってないわけでは無いですので、何か出るかもです。
自分という人物は、何が活動意欲に繋がるかは不明なトコも。
あまり先を考えると、それだけできつくなるけど、
完成しないなんてのも大問題だし。
+++++++++++++++++++++++++
いままで、OP07はFET入力かな?と思ってたのですが、バイポーラーなような?
モノによっては差動入力インピーダンスが標準30KΩとかだと、
10KΩ多回転ポテンショメーターの多用は、いささか数値が高すぎるような気がしました。
なので、一桁下げたら感触がアップするかも?
あと、オフセット防止には、電源の精度もありますが、
感圧ペダルとツイストの切り替えで差が出たりすることもあり得るので、
電源電圧の高精度化やサーメットタイプのポテンショメーターなどもありますが、
オフセットの少ない、OP07CPZの使用が有効だと思いました。
あとは、AruduinoのUSB電源と、リファレンスの+5Vを旨く分けられれば。
+++++++++++++++++++++++++
PS3のコントローラーの修理
何も弄ってないのに、何でか、方向キーや○キーがなど、やたら、コントローラーが操作されるという症状。。
多分接点不良。
で中を空けてみたのですが、昔のと比べて案外簡単に分解できます。
まず、基板の電池のコネクタを外し、
基板のネジを外す。
で、スイッチパネルと基板の接続がの圧着による接触なのですが、銀の方が結構汚れてました。(おそらく基板が炭素とフレキシブル基板が銀メッキ)
これを、両面、接点復活王で拭きまして、結構汚れが付いてきました。
でもって、タミヤの接点グリスを極薄塗りしました。
アナログ端子は、1軸4端子。
昔調べて見るにホールセンサーだったように記憶してます。
この足の半田浮きなどやクラックが懸念されるため、全部ハンダで熱して溶かしておきました。
組み立ても簡単に〜
で、完治しました。
+++++++++++++++++++++++++
++++++++++++++++++++++++++++++++++++++++++++++++++
210103
感圧式操縦桿+MMJOY2再び。
3〜4年経って、また弄りはじめました。
ドローンより、フライトシミュレーターの様な感じです。
最近、フライトモノが復権してる感じがします。
しかもVRで。
HOTAS Warthogで使えるF/A-18Cの操縦桿が魅力的に思ってみた。
が馬鹿高い。で詳細をみるに、
グリップの筐体は金属。
中身は昔のFCSとにた感じ。
インチ規格と思われるバカでかいタクトSWを使ってたりする。(昔のようにネジもインチだったり?)
しかも、内部にICが入っていて、シリアル通信のようです。マイコンかも。
実機は多分スイッチとケーブルのみっぽい。
で、
更なる魔改造を施すべし。とどこかで言われたのですが、やはり値段がうーんと言う…。
まずは、LANケーブルの芯線だと、4軸とボタンのシリアルデータを送るのに線が1本足りない。
そこで、ケーブルの被覆のシールド線だけは独立してると踏んで、被覆のシールドにGNDを移動。故にシールドのあるCat7ケーブル仕様になっている。
 パラレル⇒シリアル変換2回路と細い線を使えば、軸を通すことも出来るかもですが、適当に〜
パラレル⇒シリアル変換2回路と細い線を使えば、軸を通すことも出来るかもですが、適当に〜
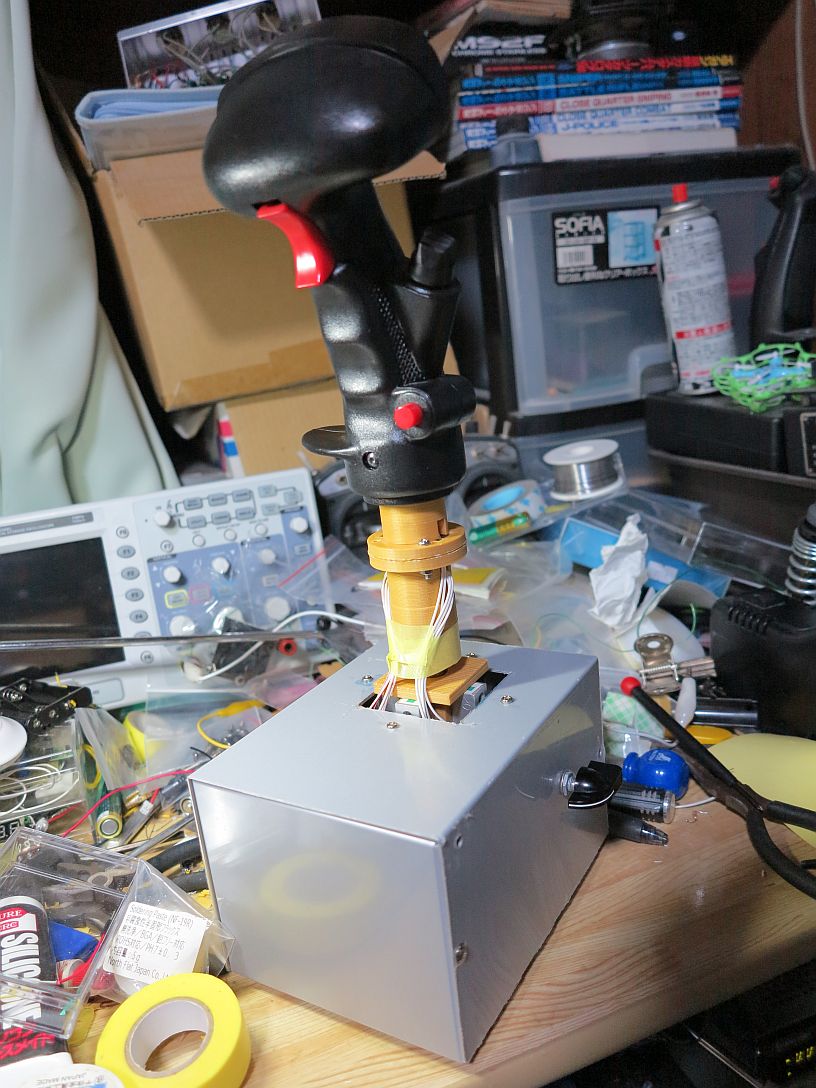 ホントは、ノイズなどの意味でも良くない気がしたのですが、
で、ブレッドボードを内蔵するという荒技をやってみました。
ホントは、ノイズなどの意味でも良くない気がしたのですが、
で、ブレッドボードを内蔵するという荒技をやってみました。
 抵抗の足すら切らないという。
そして、ワイヤーの森状態が顕著に。
ただ、感圧式なので、断線とかは起こりにくいですね。
結果、8パラレル⇒シリアル変換3回路のカスケード接続?で24ボタン入力に。
抵抗の足すら切らないという。
そして、ワイヤーの森状態が顕著に。
ただ、感圧式なので、断線とかは起こりにくいですね。
結果、8パラレル⇒シリアル変換3回路のカスケード接続?で24ボタン入力に。
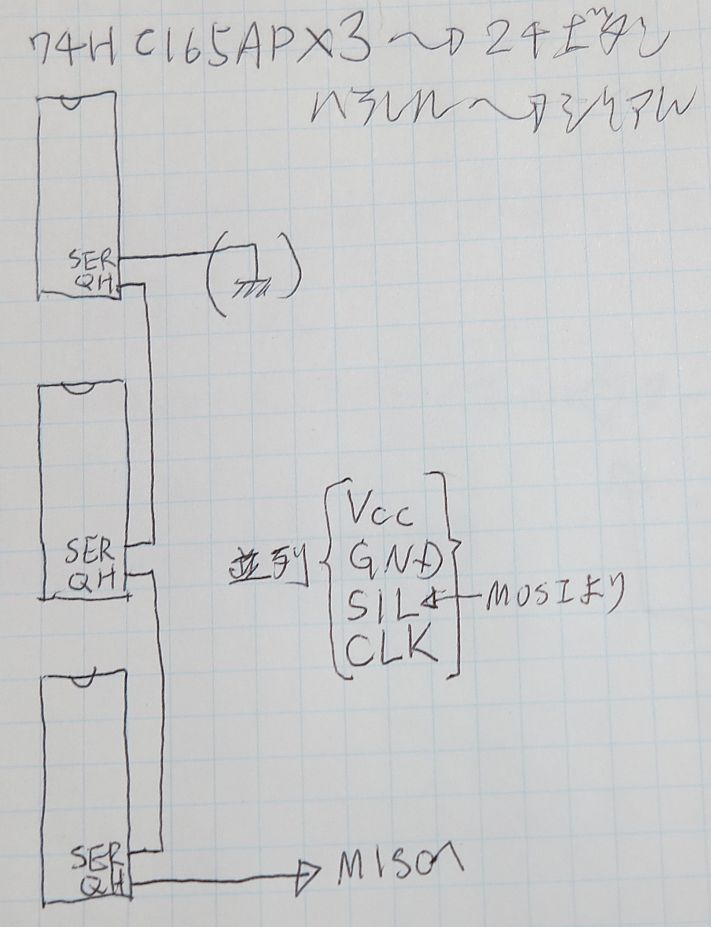 (9、10番ピンだけ描いてある感じ。)
実際使ってるのボタンは、まだ少ないので、増やしたいと思います。
使い方忘れてて、ツボにはまってました。
設定を有効にするには、デバイスへのセーブが必要でした。
(9、10番ピンだけ描いてある感じ。)
実際使ってるのボタンは、まだ少ないので、増やしたいと思います。
使い方忘れてて、ツボにはまってました。
設定を有効にするには、デバイスへのセーブが必要でした。
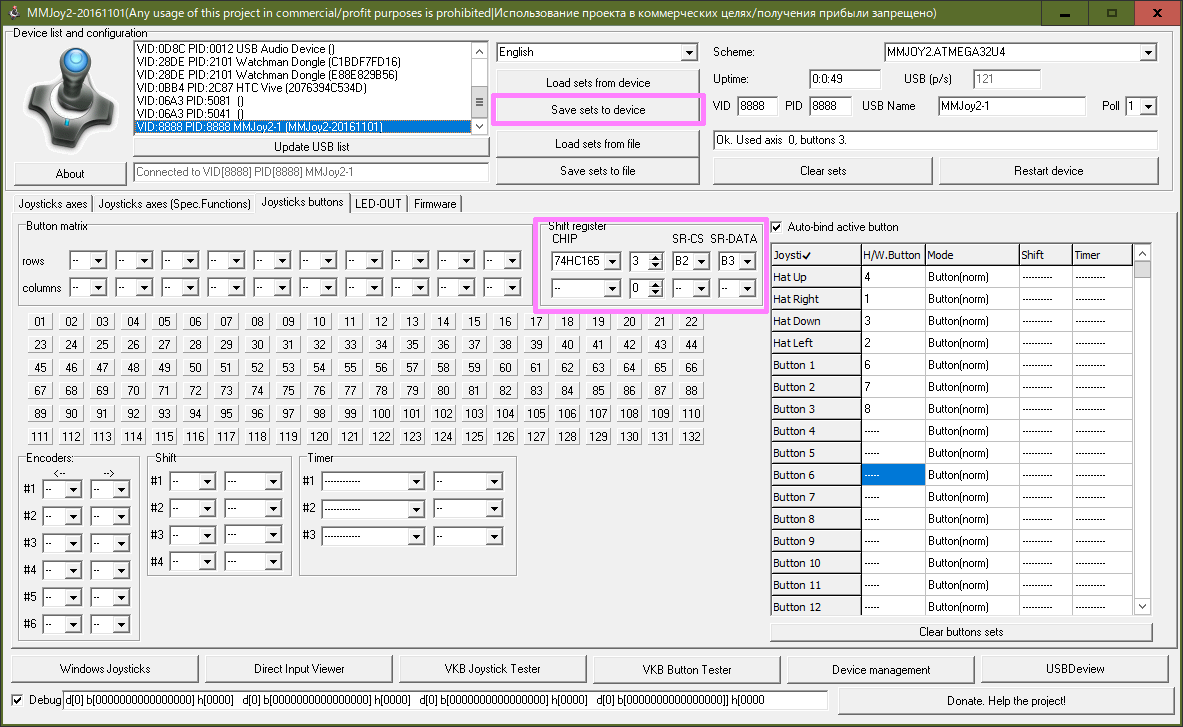 MMJOY2の、ダイレクト入力モニターだと、アナログが少々ノイズで暴れてます。
で、このまま、ProjectWingmanをプレイしてみました。
こちらのモニターではフィルター通してるためか、暴れることが無かったです。
飛べました。
ノイズは、デジタルから来てるのかハムなのか?
とにかく、ケースへの一点アースをする必要がありそう。
あとは、この手のシューティングや高度制御されてるドローンは、スロットル/コレクティブのセンターにラッチかセンターリターンが無いと、
速度の維持の楽さにかなり差が出ますので、そこも課題です。
加えて、スライダーにしたいですね。
あと、ラダーのネジは、かかるトルクから根元の極圧が強く、曲がるかもなのでクロモリが良いかも。
動かないのでドコで操縦桿の操作がMAXになったのかはあまりわからない。
あと、結構力を入れるため、ちゃんと固定しないと使用はキツイ。
緩みやすいネジのトコはネジ止め剤を。
やっておいた方が良かったこと。
ロードセルの作用点にネジ穴があるので、クリアランスの微調整に使いたかった。
スティックの力点はもうちょっと低い方が良いかも。<首部分が長い。
デジタル回路は外部メタルケースで、ロードセル周辺と分けた方が良かったかも?
フェライトコアも使えるかも?
ロードセル側の線もツイストしとくと無難だったかもですね。
電源へのコンデンサーとケースへの一点アースでノイズはかなり減りました。
後は軸に、デッドゾーンを。
MMJOY2の、ダイレクト入力モニターだと、アナログが少々ノイズで暴れてます。
で、このまま、ProjectWingmanをプレイしてみました。
こちらのモニターではフィルター通してるためか、暴れることが無かったです。
飛べました。
ノイズは、デジタルから来てるのかハムなのか?
とにかく、ケースへの一点アースをする必要がありそう。
あとは、この手のシューティングや高度制御されてるドローンは、スロットル/コレクティブのセンターにラッチかセンターリターンが無いと、
速度の維持の楽さにかなり差が出ますので、そこも課題です。
加えて、スライダーにしたいですね。
あと、ラダーのネジは、かかるトルクから根元の極圧が強く、曲がるかもなのでクロモリが良いかも。
動かないのでドコで操縦桿の操作がMAXになったのかはあまりわからない。
あと、結構力を入れるため、ちゃんと固定しないと使用はキツイ。
緩みやすいネジのトコはネジ止め剤を。
やっておいた方が良かったこと。
ロードセルの作用点にネジ穴があるので、クリアランスの微調整に使いたかった。
スティックの力点はもうちょっと低い方が良いかも。<首部分が長い。
デジタル回路は外部メタルケースで、ロードセル周辺と分けた方が良かったかも?
フェライトコアも使えるかも?
ロードセル側の線もツイストしとくと無難だったかもですね。
電源へのコンデンサーとケースへの一点アースでノイズはかなり減りました。
後は軸に、デッドゾーンを。
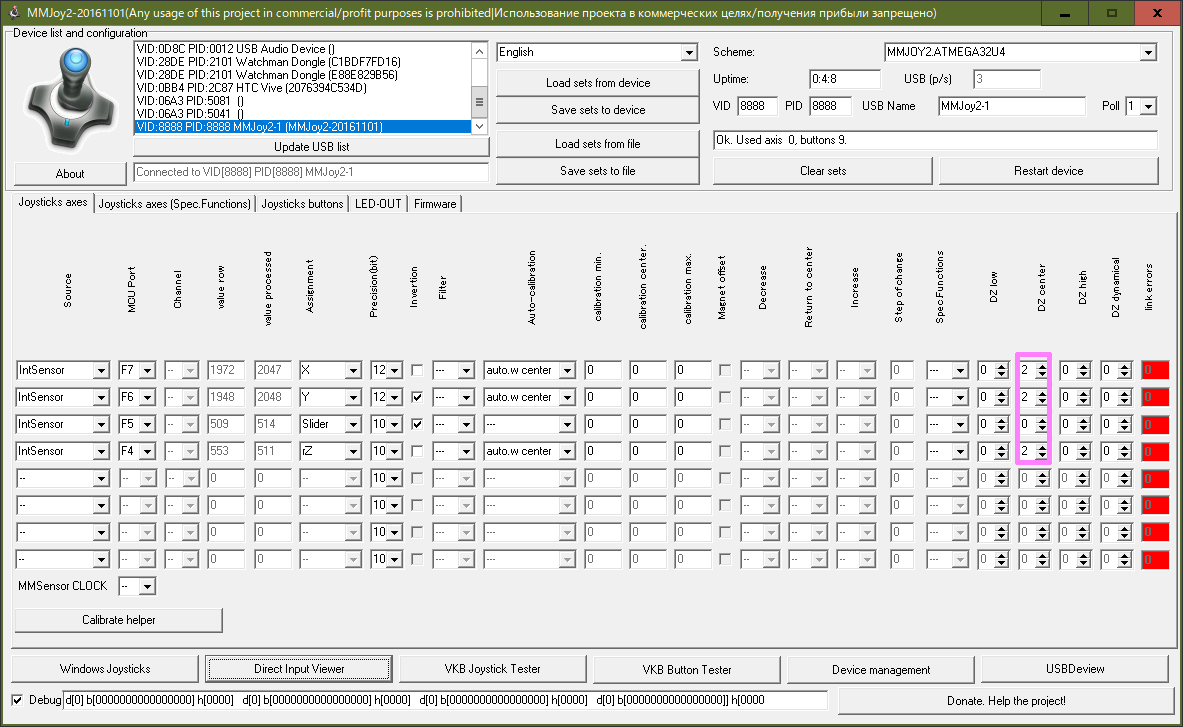 ボタンの1と24を同時に押してみました。
ボタンの1と24を同時に押してみました。
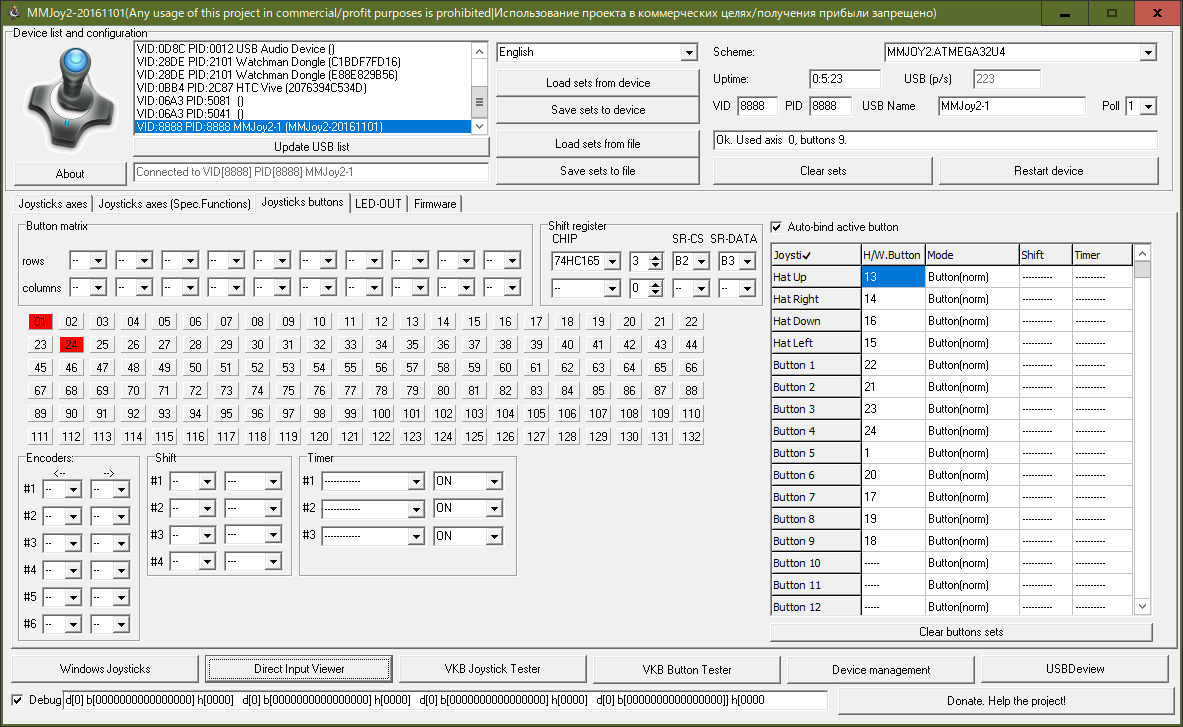 B2とかB3の意味は、マイコンのボードのピンアサインです。
21/01/04
デッドゾーンは大きくしすぎると、左右の比例係数な倍率に変わる気がします。
最初は、設計ミスや、製作ミス、OP-AMPがバイポーラだから?とか疑ってみたのですが、
OP-07はバイポーラでも、ハイインプットインピーダンスですから、そうでもないみたい。
OP-AMPのフルスイング電圧に上下非対称がある程度見られて、それがキャリブレーションに悪影響をしてるのかも?
一般のジョイパッドのLogicoolのF310の数値を見ると、デッドゾーンはとても広く。
バネの関係からも中間値を自在に操作するのは難しそう。
操作は軽いので、故に、デジタル操作に近いパルス時間的な操作な部分も?
現時点、ピッチ、ロールの感度を若干上げたいと感じてます。
妙にアナログで弄るよりデジタル設定的に上げれば済むと思ってます。
最大の200%にセット。ちょっとEXPカーブ気味にしたい気もします。
B2とかB3の意味は、マイコンのボードのピンアサインです。
21/01/04
デッドゾーンは大きくしすぎると、左右の比例係数な倍率に変わる気がします。
最初は、設計ミスや、製作ミス、OP-AMPがバイポーラだから?とか疑ってみたのですが、
OP-07はバイポーラでも、ハイインプットインピーダンスですから、そうでもないみたい。
OP-AMPのフルスイング電圧に上下非対称がある程度見られて、それがキャリブレーションに悪影響をしてるのかも?
一般のジョイパッドのLogicoolのF310の数値を見ると、デッドゾーンはとても広く。
バネの関係からも中間値を自在に操作するのは難しそう。
操作は軽いので、故に、デジタル操作に近いパルス時間的な操作な部分も?
現時点、ピッチ、ロールの感度を若干上げたいと感じてます。
妙にアナログで弄るよりデジタル設定的に上げれば済むと思ってます。
最大の200%にセット。ちょっとEXPカーブ気味にしたい気もします。
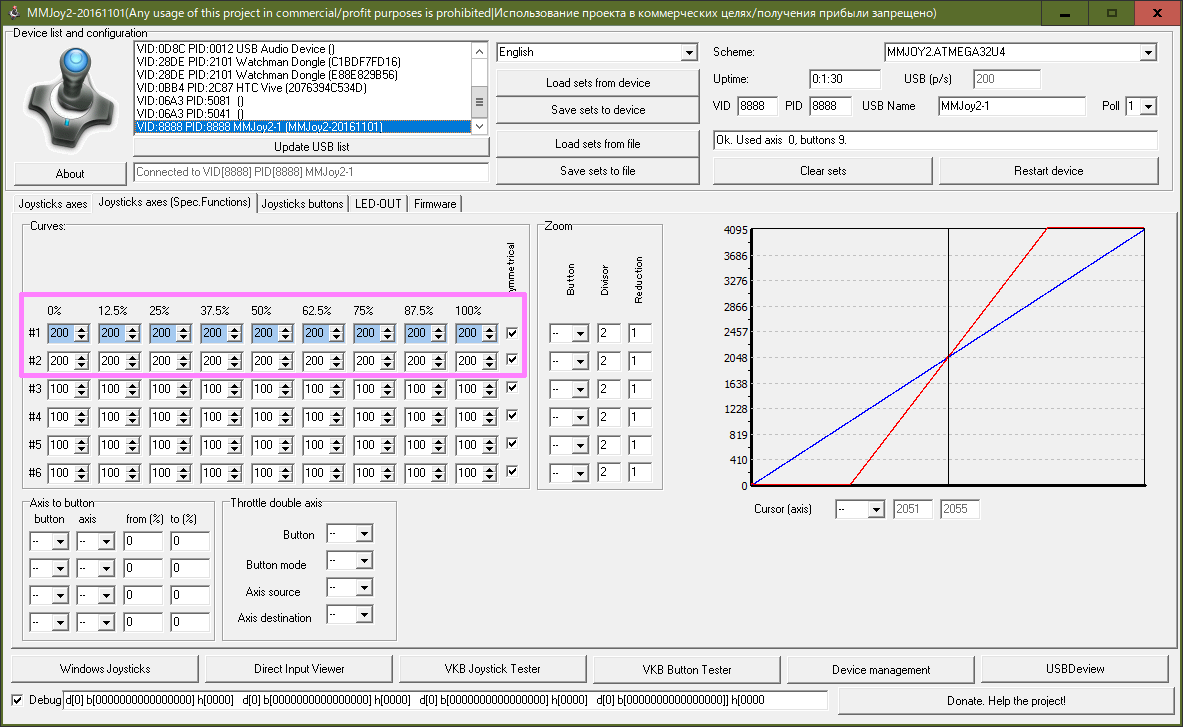
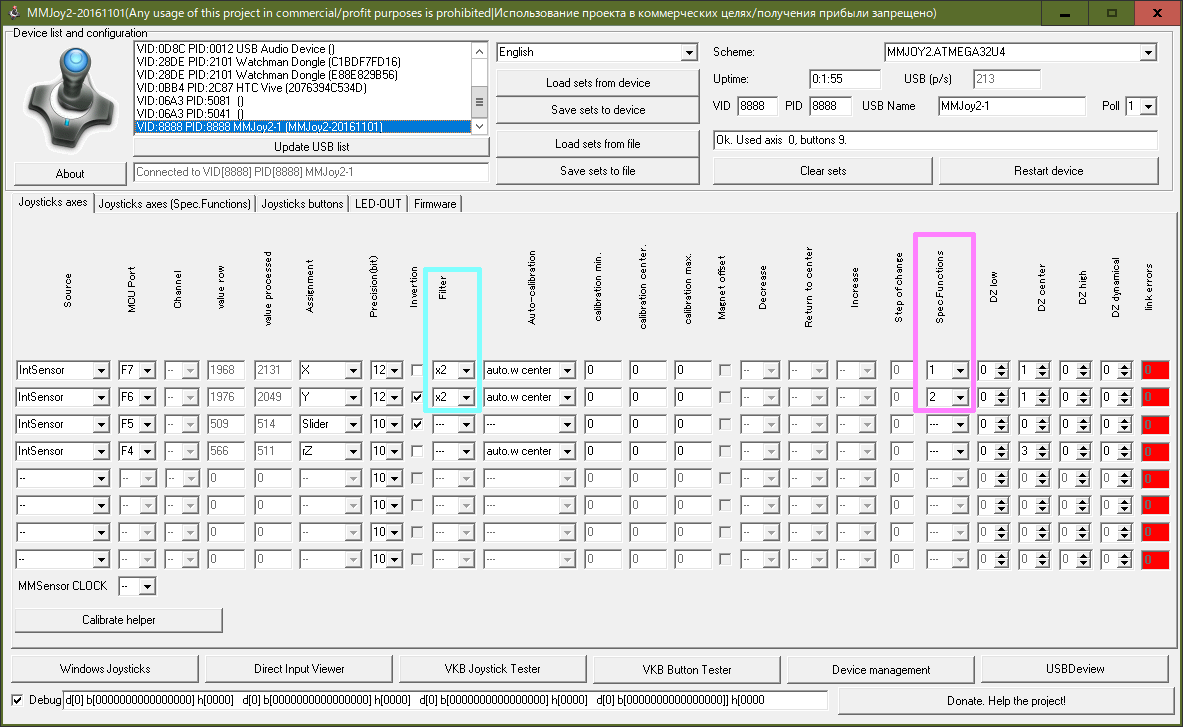 フィルターというのが時間的なスムージングかなーと思って弄って見たり。
圧力式の難しさは、、、、
初段で1000倍に増幅してるのですが、ロードセルのオフセットが1mV近いのですから、初段の出力で1V近いオフセットになります。
でも、電源は+-5Vで出力は+0〜5Vという、2段目はレールtoレールなフルスイングが要求されている。
これが、初段の飽和に寄与しない結構なギリギリレベルかもと思ってもみました。
が、1段目の後分圧で1/3になり、2段目で6倍ほどに増幅されてる。ので、それこそギリギリ??
自分でも、よく設計されてたと思います。
まあ、余裕を見るに、
もうちょっと初段のゲインを下げて、その分2段目を上げても良いし、トータルの倍率ももうちょっと高めで良いかと思います。
で、ソフト側でもゲインを幾らか上げる調節が出来るように。
−−−−−−−−−−−−−−−−−−−−
21/01/05
ラダーに感圧は向かないかもというのも考えて入るとこ。
感度およびカーブ、デッドゾーン、遊び、何らかの対策で改善すれば、
また、オフセットは、USB側の電圧にもよるところがあるかも。PCやケーブルによる電圧降下などイロイロ、
なので、同じIFでケーブルも短く。
貧弱なUSB端子は、オフセットが出たり落ち着かない感じですね。
−−−−−−−−−−−−−−−−−−−−
接点復活と維持-:??
接点復活と維持
耐久性の無いタクトスイッチだからなのかボタンの反応が悪い。
耐久性の高い特殊なタクトSWも有るが、、
ジョイスティックはタクトSWが好んで使われてるので要整備。
接点の硫化(手の油脂などから)、酸化が原因。
特にスイッチが帯電してると腐食しやすい。
あとは、カーボンなど。
サンハヤトのリレークリーナーでまず汚れを落とす。接点はぐりぐりして、汚れを擦り落とす感じで。(油脂、カーボン汚れ要らしいですが、酸化、硫化、油汚れもある程度落ちるようです。)
リレーやスイッチ接点の保護、維持というと、タミヤの接点グリースが経験上とても良い。
これを、接点復活王で流し込む。
最近のCRC接点復活剤は、洗浄力も高く、プラに優しいようですが、やっぱり気になるので、接点復活王が良い。
マイクロSWやVRには、小さな穴を開けて、注射針で流し込む。
Zの低いオーディオコネクタやRCのバッテリーコネクタなら、洗浄、ナノカーボンで油脂の多く混ざったモノは使わずが良い場合もあるかも。
コネクタ接点にはあまり手で触れないように気配りも必要。
フィルターというのが時間的なスムージングかなーと思って弄って見たり。
圧力式の難しさは、、、、
初段で1000倍に増幅してるのですが、ロードセルのオフセットが1mV近いのですから、初段の出力で1V近いオフセットになります。
でも、電源は+-5Vで出力は+0〜5Vという、2段目はレールtoレールなフルスイングが要求されている。
これが、初段の飽和に寄与しない結構なギリギリレベルかもと思ってもみました。
が、1段目の後分圧で1/3になり、2段目で6倍ほどに増幅されてる。ので、それこそギリギリ??
自分でも、よく設計されてたと思います。
まあ、余裕を見るに、
もうちょっと初段のゲインを下げて、その分2段目を上げても良いし、トータルの倍率ももうちょっと高めで良いかと思います。
で、ソフト側でもゲインを幾らか上げる調節が出来るように。
−−−−−−−−−−−−−−−−−−−−
21/01/05
ラダーに感圧は向かないかもというのも考えて入るとこ。
感度およびカーブ、デッドゾーン、遊び、何らかの対策で改善すれば、
また、オフセットは、USB側の電圧にもよるところがあるかも。PCやケーブルによる電圧降下などイロイロ、
なので、同じIFでケーブルも短く。
貧弱なUSB端子は、オフセットが出たり落ち着かない感じですね。
−−−−−−−−−−−−−−−−−−−−
接点復活と維持-:??
接点復活と維持
耐久性の無いタクトスイッチだからなのかボタンの反応が悪い。
耐久性の高い特殊なタクトSWも有るが、、
ジョイスティックはタクトSWが好んで使われてるので要整備。
接点の硫化(手の油脂などから)、酸化が原因。
特にスイッチが帯電してると腐食しやすい。
あとは、カーボンなど。
サンハヤトのリレークリーナーでまず汚れを落とす。接点はぐりぐりして、汚れを擦り落とす感じで。(油脂、カーボン汚れ要らしいですが、酸化、硫化、油汚れもある程度落ちるようです。)
リレーやスイッチ接点の保護、維持というと、タミヤの接点グリースが経験上とても良い。
これを、接点復活王で流し込む。
最近のCRC接点復活剤は、洗浄力も高く、プラに優しいようですが、やっぱり気になるので、接点復活王が良い。
マイクロSWやVRには、小さな穴を開けて、注射針で流し込む。
Zの低いオーディオコネクタやRCのバッテリーコネクタなら、洗浄、ナノカーボンで油脂の多く混ざったモノは使わずが良い場合もあるかも。
コネクタ接点にはあまり手で触れないように気配りも必要。
 この処理を行うと、接点復活剤だけではちょっと不完全だったSWの不良が治りまた、長いこと維持されます。
−−−−−−−−−−−−−−−−−−−−
サンハヤトの「接点ブライト」
この処理を行うと、接点復活剤だけではちょっと不完全だったSWの不良が治りまた、長いこと維持されます。
−−−−−−−−−−−−−−−−−−−−
サンハヤトの「接点ブライト」
 接点復活剤より強いとも言われる接点洗浄剤、「リレークリーナー」より強力。(洗浄より化学的に分解する?)
量も結構あって安い。
水溶性で化学反応みたい。使う前、使った後は、洗浄、した方が良さそうとも。そして接点グリス等で保護を。
(説明書みたら、中性ですがサビ取り剤のような匂いがあります。1〜2分後に拭き取り、水拭きもするようにかいてあります。そして保護も推奨と。)
デジタルフォトフレームに使用してみる。
電源端子が黒ずんで、青サビも少し出て、液晶にも明暗などのノイズが出てて、画像読み込みエラーも過半数のモノです。
二回洗浄したら、結構色が戻ってきて、ノイズも出なくなり、画像も良く読み込めるようになりました。
まあ、ティッシュを突っ込んで拭き、リレークリーナーを使って、ティッシュを突っ込んで拭き、接点復活王で保護しました。
リレークリーナーは、ティッシュに付けて拭くとかが良いです。
フェーダーとかには「ガリ取りくん」も有りますね。油性のようですね。
あとは、まあ有名な「ケイグ」Fシリーズは還元作用もあり、プラにも優しいらしいですが、
高いし、レビュー見るとそれしか使ったことがないというか対比的評価が無い人が多いので〜
あと、スプレータイプは飛び散るし、原液注入タイプは高い。
−−−−−−−−−−−−−−−−−−−−
スロットル
100mmのスライドボリューム:RSA0N11S9A0K
ロータリーVRを狭角で使うには、ソフトのキャリブレーションで狭い角度を設定する。
センターの判別の問題があるので工夫が必要。ラッチかセンターリターン。。
ネオジウム磁石でうまく出来ました。
この方法は、スライドボリュームでも有効。
接点復活剤より強いとも言われる接点洗浄剤、「リレークリーナー」より強力。(洗浄より化学的に分解する?)
量も結構あって安い。
水溶性で化学反応みたい。使う前、使った後は、洗浄、した方が良さそうとも。そして接点グリス等で保護を。
(説明書みたら、中性ですがサビ取り剤のような匂いがあります。1〜2分後に拭き取り、水拭きもするようにかいてあります。そして保護も推奨と。)
デジタルフォトフレームに使用してみる。
電源端子が黒ずんで、青サビも少し出て、液晶にも明暗などのノイズが出てて、画像読み込みエラーも過半数のモノです。
二回洗浄したら、結構色が戻ってきて、ノイズも出なくなり、画像も良く読み込めるようになりました。
まあ、ティッシュを突っ込んで拭き、リレークリーナーを使って、ティッシュを突っ込んで拭き、接点復活王で保護しました。
リレークリーナーは、ティッシュに付けて拭くとかが良いです。
フェーダーとかには「ガリ取りくん」も有りますね。油性のようですね。
あとは、まあ有名な「ケイグ」Fシリーズは還元作用もあり、プラにも優しいらしいですが、
高いし、レビュー見るとそれしか使ったことがないというか対比的評価が無い人が多いので〜
あと、スプレータイプは飛び散るし、原液注入タイプは高い。
−−−−−−−−−−−−−−−−−−−−
スロットル
100mmのスライドボリューム:RSA0N11S9A0K
ロータリーVRを狭角で使うには、ソフトのキャリブレーションで狭い角度を設定する。
センターの判別の問題があるので工夫が必要。ラッチかセンターリターン。。
ネオジウム磁石でうまく出来ました。
この方法は、スライドボリュームでも有効。
 ++++++++++++++++++++
デッドゾーンのダイナミカルは、ハイとロー両側の余白みたいなモノかな?
++++++++++++++++++++
デッドゾーンのダイナミカルは、ハイとロー両側の余白みたいなモノかな?
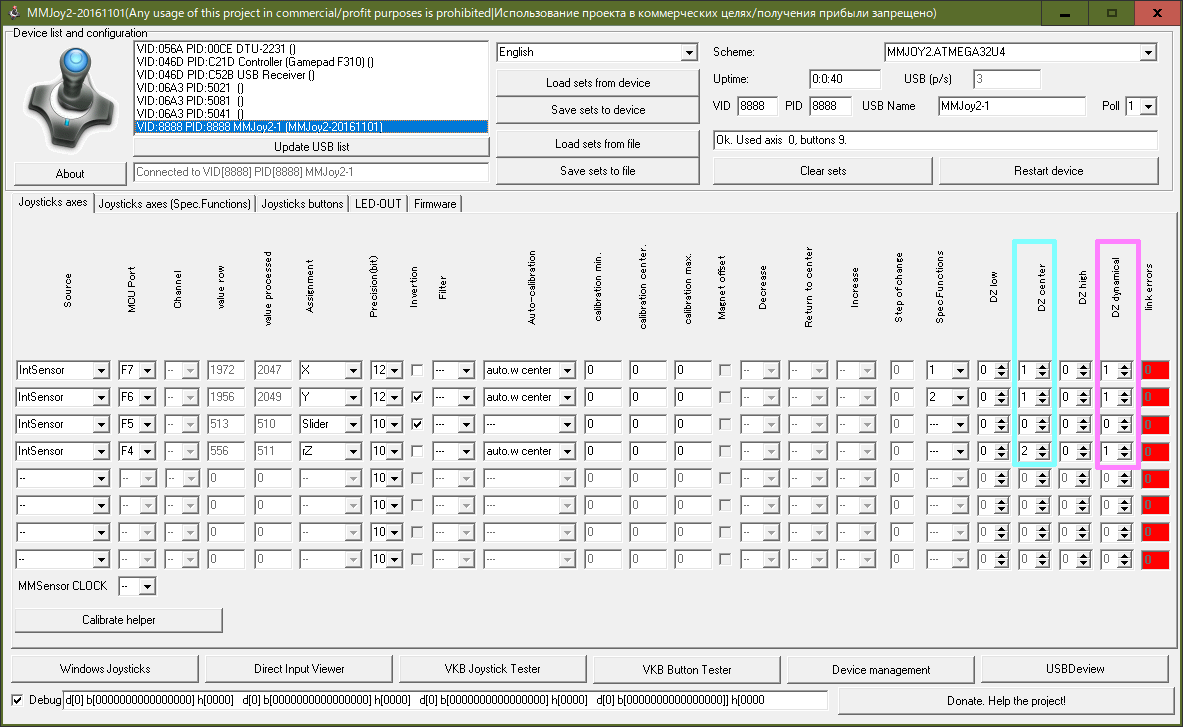 キャリブレーションのLOとMAXでも感度に何か出来るかも知れない。
アナログ入力はPro-Microには、10〜12あるようです。がMMJOY2で有効なのは多分8軸です。
USB電源でオフセットが狂わないようにするには、外部電源のUSBハブを使うか?でも安定はするが、ハブの電源電圧のオフセットは食らう。
A/Dコンバーター、MCP3208を使うのもテかなと思いました。理由は、A/D用のリファレンスの5V電圧を任意に設定出来るからです。
最大でアナログが増えることとなりえるように思えます。が、ただシリアルは、遅延とかないのかな?それ以前に設定画面に8chしかないような…、
ということは、インターナルと共存できないとか?<フォーラムには共存できてる画像が有る。
あとは、LED出力には74HC595
2段目のOP-AMPは「入出力共に」フルスイングできるものがのぞましいようです。
2回路だとNJM2737Dとかがあります。(6Vまでなので、電源に注意)
NJM2737Dは単電源動作も良好のようです。ただ、マイナス電源有りやその他差動電圧が1.0Vなことで神経質かも知れません。
NJU7062も出力はフルスイング単電源動作で電圧に余裕があります。低オフセットでもあります。
一回路だと、NJU7031D単電源
出力がマイナスに振れない事を考えると2段目の単電源OP-AMPは単電源で駆動した方が良さそうですね。
これらは、ホール素子用にも良いかもですね。
++++++++++++++++++++
210107
自作感圧式操縦桿を使って見た印象。
感圧式操縦桿を固定しました。
散々悩んで、板を机の下から600mmの長めの板をネジで固定する方式に。
キャリブレーションのLOとMAXでも感度に何か出来るかも知れない。
アナログ入力はPro-Microには、10〜12あるようです。がMMJOY2で有効なのは多分8軸です。
USB電源でオフセットが狂わないようにするには、外部電源のUSBハブを使うか?でも安定はするが、ハブの電源電圧のオフセットは食らう。
A/Dコンバーター、MCP3208を使うのもテかなと思いました。理由は、A/D用のリファレンスの5V電圧を任意に設定出来るからです。
最大でアナログが増えることとなりえるように思えます。が、ただシリアルは、遅延とかないのかな?それ以前に設定画面に8chしかないような…、
ということは、インターナルと共存できないとか?<フォーラムには共存できてる画像が有る。
あとは、LED出力には74HC595
2段目のOP-AMPは「入出力共に」フルスイングできるものがのぞましいようです。
2回路だとNJM2737Dとかがあります。(6Vまでなので、電源に注意)
NJM2737Dは単電源動作も良好のようです。ただ、マイナス電源有りやその他差動電圧が1.0Vなことで神経質かも知れません。
NJU7062も出力はフルスイング単電源動作で電圧に余裕があります。低オフセットでもあります。
一回路だと、NJU7031D単電源
出力がマイナスに振れない事を考えると2段目の単電源OP-AMPは単電源で駆動した方が良さそうですね。
これらは、ホール素子用にも良いかもですね。
++++++++++++++++++++
210107
自作感圧式操縦桿を使って見た印象。
感圧式操縦桿を固定しました。
散々悩んで、板を机の下から600mmの長めの板をネジで固定する方式に。
 これで、やっとProjectWingmanを実戦でプレイ。
今回は、VRモードでプレイしました。HMDなので、HOTASが重要ですね。
ラダーは、まだ、感圧式は有効かわからないのと感度調整とかが済んでないので、
Ch ProductsのPRO PEDALSというのを使いました。というか、ラダーはほぼ使用しておりません。
また、スロットルにデッドゾーンを儲けました。他の遊びは18%程度。
これで、やってみて、かなり旨く飛びます。
設定でTGT選択を忘れてましたが、、
とにかく、機銃が驚くほどよく当たる。
もしかして、感圧式は、切り返しが俊敏なことに起因するのかも知れないですね。
スロットルも結構単純なのにラクにコントロールできます。
チャフ/フレアが押しにくい感じはしてますので、スロットル付近かレバーに付けたいかも。と思いました。
追記>
スコードロンをプレイ。
ピッチがかなり強くシビアです。
どうも、コントローラーをまたぐと、ペダルを使うたびにフリーズしてしまったので、
しかもラダーが機敏すぎる。
なので、感圧のツイストラダーにしたら物凄く良い感じ。足のように鈍な動きでは無いという事かも知れないですね。
コントロール信号。
これで、やっとProjectWingmanを実戦でプレイ。
今回は、VRモードでプレイしました。HMDなので、HOTASが重要ですね。
ラダーは、まだ、感圧式は有効かわからないのと感度調整とかが済んでないので、
Ch ProductsのPRO PEDALSというのを使いました。というか、ラダーはほぼ使用しておりません。
また、スロットルにデッドゾーンを儲けました。他の遊びは18%程度。
これで、やってみて、かなり旨く飛びます。
設定でTGT選択を忘れてましたが、、
とにかく、機銃が驚くほどよく当たる。
もしかして、感圧式は、切り返しが俊敏なことに起因するのかも知れないですね。
スロットルも結構単純なのにラクにコントロールできます。
チャフ/フレアが押しにくい感じはしてますので、スロットル付近かレバーに付けたいかも。と思いました。
追記>
スコードロンをプレイ。
ピッチがかなり強くシビアです。
どうも、コントローラーをまたぐと、ペダルを使うたびにフリーズしてしまったので、
しかもラダーが機敏すぎる。
なので、感圧のツイストラダーにしたら物凄く良い感じ。足のように鈍な動きでは無いという事かも知れないですね。
コントロール信号。
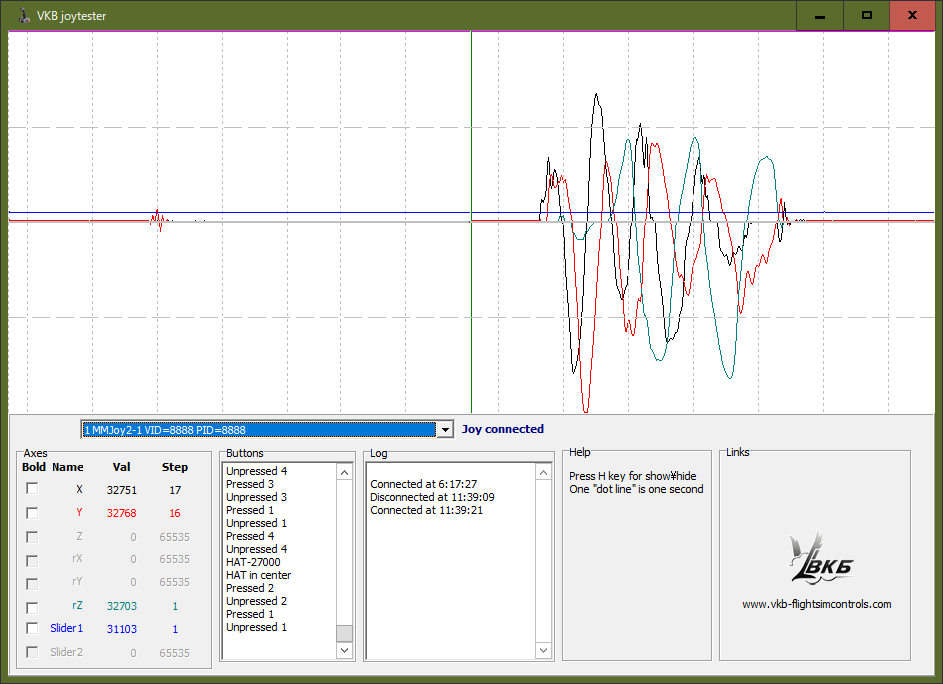 オフセットしてる青はスロットルです。
スロットルは、センターキャリブレーションを設定しておりません。
細かいギザギザはスティックに与えた衝撃ですね。
−−−−−−−−−−−−−−−−−−−−
今までは、HATスイッチなど、一部、ボタンのシリアル化の回路を半分、外に出してたのですが、
操縦桿に内蔵してしまおうと思います。
それにしたがって、SWの数も3つ増やせます。
感圧式ラダーペダルも作ってみたいです。
片足ずつロードセル2つを使う方法と、一つでペダルにかかる力を見積もる方法を思いつきましたが、
実機なども二つだと思いますので、二つが良さそうです。
ただ、シーソーの棒にロードセルを2つ付けたモノにしたいと思っております。
スロットルレバーも独立して作りたいと思っております。
これは、製品の改造で良いかなーとおもっております。
++++++++++++++++++++
210109
ロードセル電圧用のAMPの2段目のOP-AMPがマイナス電源を使用して居たので、これを単電源にしました。
これが、NJU7043Dを飛ばす結果になってたと思います。
ホール素子用など、他の回路は単電源にしてたので壊れなかったようです。
理由は、MMJOY2ボードにマイナス電圧が行ってしまうのと、上下の振れ幅の均一化がキャリブレーションに好結果をもたらす可能性です。
使用するOP-AMPは単電源用になります。
キャリブレーションで、0〜4095まで振らさないとしっかりした振幅が取れない部分も?。
スティックのコントロールには、微分情報が混在してる気もします。
電源コネクタ付近の接触不良がオフセットに影響していたので接点不良などを改善。
振幅の中心とか実際のセンターがずれると、左右の比例係数が変わるようであるが、激しく問題があるかと言われれば、殆ど関係ない。。
ジョイパッドと比べると、断然数値のコントロールがラクである事実がある。
ロードセルの個体差やメカニカルな機構である程度の上下左右の比例係数に差が出てるのもあるかもしれないこともあります。
現在、2段目は10倍に設定して、MMJOY2の方でもヨー、ロールは2倍、ピッチは1.41倍に設定しております。
カーブは比例で、デッドゾーンを任意に設定。
シリアル出力をする、12BitA/Dコンバーターの
MCP3208なのですが、主なる利点は、リファレンスがあるのでUSB端子の電圧でオフセットが生ずるコトが無いことです。
一番の問題は、静電気に弱そうです。4000V以上に耐えられるとはありますが、入出力にツエナーが付いてるわけでは無く、
秋月のには、ICソケットが付いてます。
MMJOY2に使ってるArduinoのボードなんかは、あまり気にする必要が無いのですが…、、、、
接続してみたトコ、動かない…、設定に間違いが無さそうなので、早速に壊れた可能性も。。。
MCP3208の10ピン(CS)はB4〜B6などではなく
D3につないでる図が有るのだが、、10ピンは入力のようですので、
出力につなぐと言うことは、D3の方が理にかなっているような気もします。
オフセットしてる青はスロットルです。
スロットルは、センターキャリブレーションを設定しておりません。
細かいギザギザはスティックに与えた衝撃ですね。
−−−−−−−−−−−−−−−−−−−−
今までは、HATスイッチなど、一部、ボタンのシリアル化の回路を半分、外に出してたのですが、
操縦桿に内蔵してしまおうと思います。
それにしたがって、SWの数も3つ増やせます。
感圧式ラダーペダルも作ってみたいです。
片足ずつロードセル2つを使う方法と、一つでペダルにかかる力を見積もる方法を思いつきましたが、
実機なども二つだと思いますので、二つが良さそうです。
ただ、シーソーの棒にロードセルを2つ付けたモノにしたいと思っております。
スロットルレバーも独立して作りたいと思っております。
これは、製品の改造で良いかなーとおもっております。
++++++++++++++++++++
210109
ロードセル電圧用のAMPの2段目のOP-AMPがマイナス電源を使用して居たので、これを単電源にしました。
これが、NJU7043Dを飛ばす結果になってたと思います。
ホール素子用など、他の回路は単電源にしてたので壊れなかったようです。
理由は、MMJOY2ボードにマイナス電圧が行ってしまうのと、上下の振れ幅の均一化がキャリブレーションに好結果をもたらす可能性です。
使用するOP-AMPは単電源用になります。
キャリブレーションで、0〜4095まで振らさないとしっかりした振幅が取れない部分も?。
スティックのコントロールには、微分情報が混在してる気もします。
電源コネクタ付近の接触不良がオフセットに影響していたので接点不良などを改善。
振幅の中心とか実際のセンターがずれると、左右の比例係数が変わるようであるが、激しく問題があるかと言われれば、殆ど関係ない。。
ジョイパッドと比べると、断然数値のコントロールがラクである事実がある。
ロードセルの個体差やメカニカルな機構である程度の上下左右の比例係数に差が出てるのもあるかもしれないこともあります。
現在、2段目は10倍に設定して、MMJOY2の方でもヨー、ロールは2倍、ピッチは1.41倍に設定しております。
カーブは比例で、デッドゾーンを任意に設定。
シリアル出力をする、12BitA/Dコンバーターの
MCP3208なのですが、主なる利点は、リファレンスがあるのでUSB端子の電圧でオフセットが生ずるコトが無いことです。
一番の問題は、静電気に弱そうです。4000V以上に耐えられるとはありますが、入出力にツエナーが付いてるわけでは無く、
秋月のには、ICソケットが付いてます。
MMJOY2に使ってるArduinoのボードなんかは、あまり気にする必要が無いのですが…、、、、
接続してみたトコ、動かない…、設定に間違いが無さそうなので、早速に壊れた可能性も。。。
MCP3208の10ピン(CS)はB4〜B6などではなく
D3につないでる図が有るのだが、、10ピンは入力のようですので、
出力につなぐと言うことは、D3の方が理にかなっているような気もします。
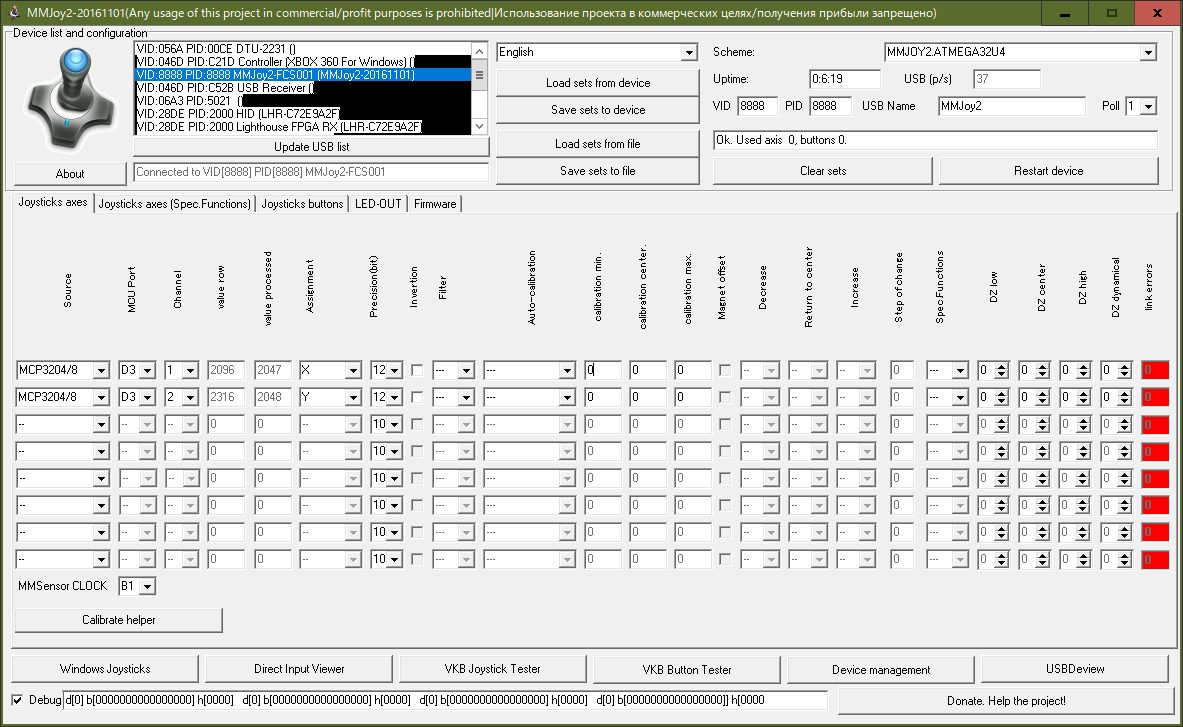 こんな感じの設定が、妥当に思います。
Leonardoの外部電源はどうかな?三端子レギュレタ積んでるみたいだけど?
多くの電源アダプターが、温度で電圧が変わる。
センサー電圧を増幅してると、ジョイスティック側の電圧精度が高いために、
USBとの対比でオフセットしてしまう。
プアな電源だと、こまめなキャリブレーションが必要。
また、ロードセルは、印加電圧をかけ、微弱な信号を増幅してるので、オフセットしやすい。
スティックのX-Yを一個のホールセンサーMLX90333のように、TLE5010/TLE5011磁気角度センサ?で読むのはあるようですが、コレを使うと、ツイストでのヨー軸の読み取りの構造がグリップ内部に必要になるようで複雑になるので…、
ただ、ジンバルが簡素になって、本質的にガタが殆ど無い仕様になると思います。
EXPカーブみたいなのを見つけて、数値を修正。
こんな感じの設定が、妥当に思います。
Leonardoの外部電源はどうかな?三端子レギュレタ積んでるみたいだけど?
多くの電源アダプターが、温度で電圧が変わる。
センサー電圧を増幅してると、ジョイスティック側の電圧精度が高いために、
USBとの対比でオフセットしてしまう。
プアな電源だと、こまめなキャリブレーションが必要。
また、ロードセルは、印加電圧をかけ、微弱な信号を増幅してるので、オフセットしやすい。
スティックのX-Yを一個のホールセンサーMLX90333のように、TLE5010/TLE5011磁気角度センサ?で読むのはあるようですが、コレを使うと、ツイストでのヨー軸の読み取りの構造がグリップ内部に必要になるようで複雑になるので…、
ただ、ジンバルが簡素になって、本質的にガタが殆ど無い仕様になると思います。
EXPカーブみたいなのを見つけて、数値を修正。
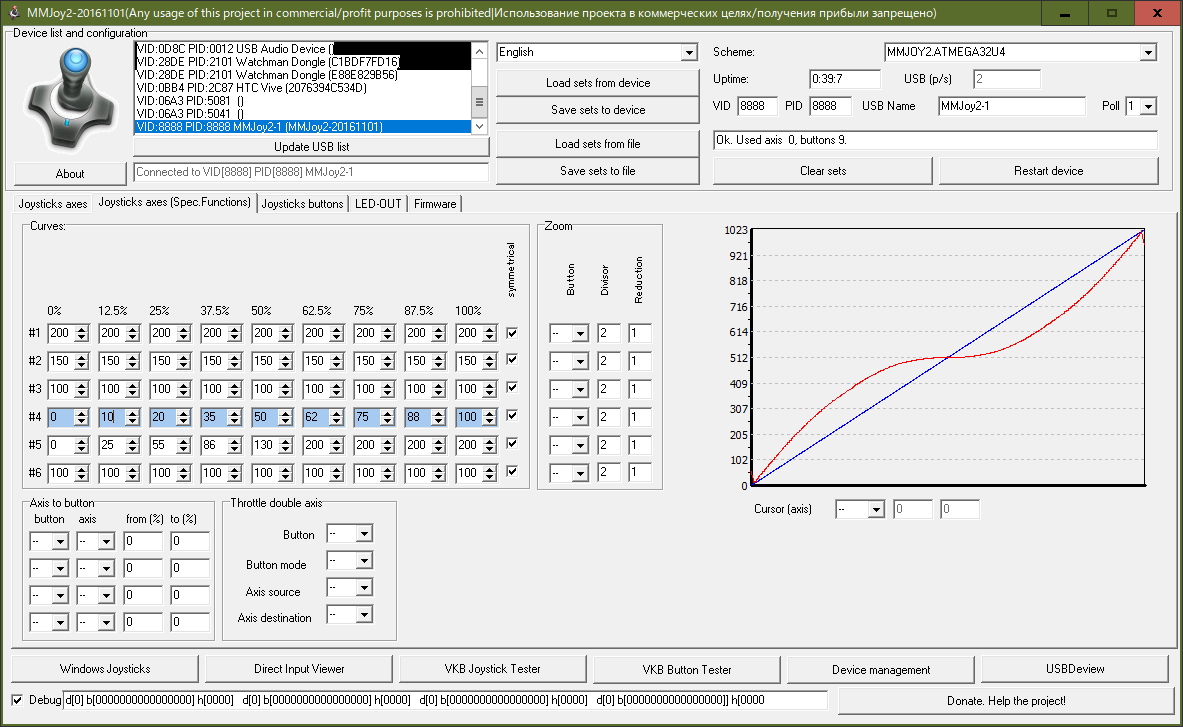
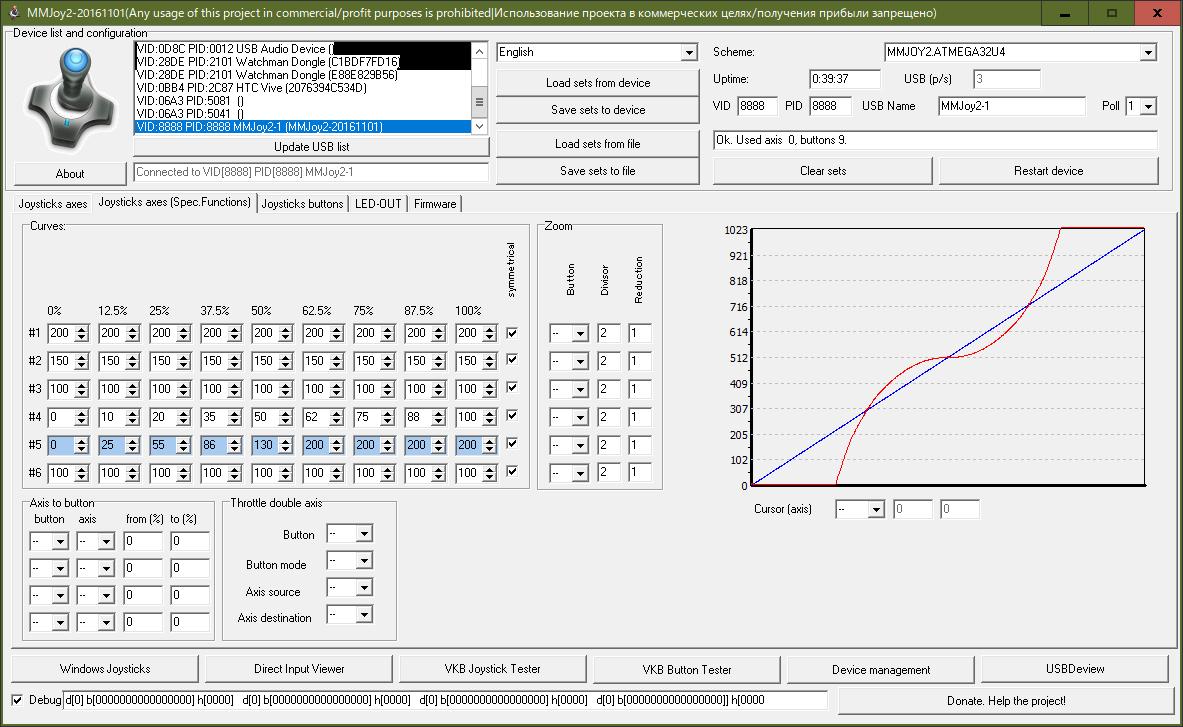 ++++++++++++++++++++
2021/01/10
ベストのジョイスティックというのは有るだろうけど、ベストの設定は…、
ゲームソフトによって、デッドゾーン、感度設定やそのカーブが違う、ゲームによって設定もあるが…。
ジョイスティック側でも設定出来るが、それとの兼ね合いが難しい。
スコードロンでラダーがペダルよりも上手く自在に行ったので、
ProjectWingmanで使って見ると、ラダーを操作すると、エルロンも混ざってしまう。その逆もある。
ProjectWingmanはゲーム側で設定もある程度出来、EXPもあるが、どうにも旨くない。
スコードロンは設定はあまりないようだが、操作が混ざることがあまり感じないのですが、回転操作には慣性は働く、
これまた、デフォの設定というのが見えないだけで、ジョイスティックそのままの設定で動かしてるわけでは無い。
一応、感度とデッドゾーンの設定を見つけたのみではあるのだが…。
となると、面倒にも、ジョイスティック側のドライバーでの設定をゲームごとに呼び出して書き換えるという操作になりそう。
角度で制御するより小さなコントロールが出来るように。
フォースコントロールの場合、低感度にして舵には底が深いような感じにも設定出来る。
操縦桿に十分な強度があるならそういう風にしても良いのかも。
普通のスティックの場合、角度があって微少な角度と大きな角度で限界が出てくるが、
動かないスティックの場合、力を入れれば入れるほど舵がデカくなると言う設定に近くできる。長くプレイすると筋力が疲れるかも。
また、各軸は、筋力の差があるので、、
例えば、ロールに対して、ピッチの感度は1/2程度にした方が良いかも。
ロールとヨーは感度低めが無難ですが、舵が混ざらないようにするにはどうしたらよいモノか。
ヨー⇒ロール、ロール⇒ヨーのどちらが混ざる方向というのがあり、どっちを優先するかもありますね。
スコードロンはフライトモノの着陸などほど機体の水平というモノがあまり関係ないようなので、
ある程度以上大きく舵を切る場合は、それに比例するほど混ざらないのかもですので、
デッドゾーンやEXPカーブも設定すれば、極端にはデジタルコントロールのようにクッキリ分けられる場合も?
フライトモノでは、ヨー軸は足で操作することからも、鈍でスイッチのようなクッキリした操作でもそれなりで良い感じも?
あと、どうやら、操縦桿のグリップ下部にあるハンドレストに手をもたれかけたままラダーを操作すると、強くロールが加わる気もします。
実際、ペダルをミックスして操作できれば、面白いことになるかなーとか、感圧式ペダルはどうかな?とか。
エルロンの弱めラダーを敏感にする⇒機体のロールが起こりにくい。逆にエルロンを操作するとヨー軸が動く。
お気軽操作のシューティングでは一見良い感じだけど、どうかな?
ラダーはそうそう単独で動かさないモノの気がして不自然な気も。
で、今、逆の感じにして、ラダーにEXPカーブを付けてちょっとなら鈍感。大きくは敏感に。
ラダーの回路は、ちょっと抵抗が違う(2段目の倍率設定抵抗が1/10でピッチロールと同じ増幅比でバランス。)ので、強くひねっても出力が大きく振れない感じではありますので、。
++++++++++++++++++++
2021/01/10
ベストのジョイスティックというのは有るだろうけど、ベストの設定は…、
ゲームソフトによって、デッドゾーン、感度設定やそのカーブが違う、ゲームによって設定もあるが…。
ジョイスティック側でも設定出来るが、それとの兼ね合いが難しい。
スコードロンでラダーがペダルよりも上手く自在に行ったので、
ProjectWingmanで使って見ると、ラダーを操作すると、エルロンも混ざってしまう。その逆もある。
ProjectWingmanはゲーム側で設定もある程度出来、EXPもあるが、どうにも旨くない。
スコードロンは設定はあまりないようだが、操作が混ざることがあまり感じないのですが、回転操作には慣性は働く、
これまた、デフォの設定というのが見えないだけで、ジョイスティックそのままの設定で動かしてるわけでは無い。
一応、感度とデッドゾーンの設定を見つけたのみではあるのだが…。
となると、面倒にも、ジョイスティック側のドライバーでの設定をゲームごとに呼び出して書き換えるという操作になりそう。
角度で制御するより小さなコントロールが出来るように。
フォースコントロールの場合、低感度にして舵には底が深いような感じにも設定出来る。
操縦桿に十分な強度があるならそういう風にしても良いのかも。
普通のスティックの場合、角度があって微少な角度と大きな角度で限界が出てくるが、
動かないスティックの場合、力を入れれば入れるほど舵がデカくなると言う設定に近くできる。長くプレイすると筋力が疲れるかも。
また、各軸は、筋力の差があるので、、
例えば、ロールに対して、ピッチの感度は1/2程度にした方が良いかも。
ロールとヨーは感度低めが無難ですが、舵が混ざらないようにするにはどうしたらよいモノか。
ヨー⇒ロール、ロール⇒ヨーのどちらが混ざる方向というのがあり、どっちを優先するかもありますね。
スコードロンはフライトモノの着陸などほど機体の水平というモノがあまり関係ないようなので、
ある程度以上大きく舵を切る場合は、それに比例するほど混ざらないのかもですので、
デッドゾーンやEXPカーブも設定すれば、極端にはデジタルコントロールのようにクッキリ分けられる場合も?
フライトモノでは、ヨー軸は足で操作することからも、鈍でスイッチのようなクッキリした操作でもそれなりで良い感じも?
あと、どうやら、操縦桿のグリップ下部にあるハンドレストに手をもたれかけたままラダーを操作すると、強くロールが加わる気もします。
実際、ペダルをミックスして操作できれば、面白いことになるかなーとか、感圧式ペダルはどうかな?とか。
エルロンの弱めラダーを敏感にする⇒機体のロールが起こりにくい。逆にエルロンを操作するとヨー軸が動く。
お気軽操作のシューティングでは一見良い感じだけど、どうかな?
ラダーはそうそう単独で動かさないモノの気がして不自然な気も。
で、今、逆の感じにして、ラダーにEXPカーブを付けてちょっとなら鈍感。大きくは敏感に。
ラダーの回路は、ちょっと抵抗が違う(2段目の倍率設定抵抗が1/10でピッチロールと同じ増幅比でバランス。)ので、強くひねっても出力が大きく振れない感じではありますので、。
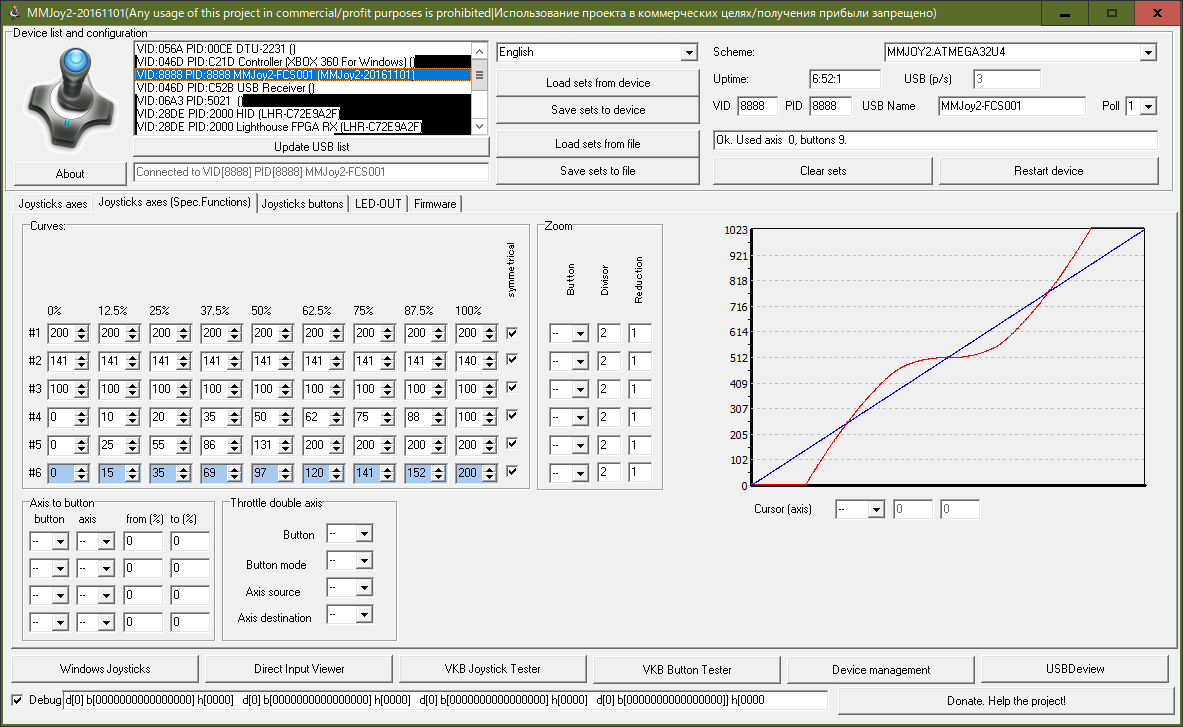 こんな感じにして、更にゲームソフト側で弄ってます。
ただ、これでも、ProjectWingmanだとペダルが良いかも。結構鈍く感じるので。ゲーム上で基本的にデッドゾーンとEXPを操作するのみで、感度が調整出来ないのが問題なのかも知れない。
ラダーのコントロールが機銃の向きに大きく影響したり、車のように方向が変わり着陸がしやすいなど実機とは違う感じですが、
ゲーム上では強く影響してるようなので、ここは大きな課題です。
++++++++++++++++++++
210111
操縦桿のグリップ内部にボタンのシリアル化回路を全て詰め込みました。プルアップ抵抗は33KΩにしました。接点への電気的負担も減ったかもです。
基板が横では入らないので、縦で突っ込みました。
ボタンがあと3つ増やせますが、中はもういっぱいなのでやりたくないですね。
スロットル側のボタンは、簡素なら、操縦桿の下半身であるセンサー回路の筐体に足してあるので8つ足せますが、
こちらも中がごちゃごちゃなので…、
スロットルグリップは、別のUSBでつなぐと思います。
ラダーペダルは切り替え式が良いかな?
黒とかABSのままでなく隠蔽製の高い塗装にしたい気も?
グリップの筐体がホントに金属なら、筐体をスイッチのGNDでつないで配線を省略するのも良いかも?
++++++++++++++++++++
210112
MMJOY2のファームウェア書き込みにちょっとつまずいたので、前に遡ったそこの文を加筆しました。
思ったのですが、MMJOY2のボードのVccと操縦桿の方のVccはつなぐ必要は無いのかも。
妙にオフセットが出る場合、ココを変えてみるのもテかも。
−−−−−−−−−−−−−−−−−−−−
スコードロン、VRでは連合軍Xウィングはかなりの視界。
まだ、ピッチ操作にオーバーシュートを起こしやすいけど。
ジョイパッドではまぐれ当たりを望む感じでしたが、
自作感圧操縦桿にて追いかけながら当たる当たる。
しかも、ドッグファイトは、近距離で狙えます。
でも反射神経モノなので、疲れると意識が集中できず〜w
++++++++++++++++++++
感圧式ラダーペダル-:??
I型のロードセルは筐体に強度が必要で、S字型は高価なので…、
ペダルの片方だけロードセルを付けて伸縮を読んでも良いとは思うけど非対称でなんだか…、
SC902という、4個で使うロードセル。
これで上手く行けば…、、
こんな感じにして、更にゲームソフト側で弄ってます。
ただ、これでも、ProjectWingmanだとペダルが良いかも。結構鈍く感じるので。ゲーム上で基本的にデッドゾーンとEXPを操作するのみで、感度が調整出来ないのが問題なのかも知れない。
ラダーのコントロールが機銃の向きに大きく影響したり、車のように方向が変わり着陸がしやすいなど実機とは違う感じですが、
ゲーム上では強く影響してるようなので、ここは大きな課題です。
++++++++++++++++++++
210111
操縦桿のグリップ内部にボタンのシリアル化回路を全て詰め込みました。プルアップ抵抗は33KΩにしました。接点への電気的負担も減ったかもです。
基板が横では入らないので、縦で突っ込みました。
ボタンがあと3つ増やせますが、中はもういっぱいなのでやりたくないですね。
スロットル側のボタンは、簡素なら、操縦桿の下半身であるセンサー回路の筐体に足してあるので8つ足せますが、
こちらも中がごちゃごちゃなので…、
スロットルグリップは、別のUSBでつなぐと思います。
ラダーペダルは切り替え式が良いかな?
黒とかABSのままでなく隠蔽製の高い塗装にしたい気も?
グリップの筐体がホントに金属なら、筐体をスイッチのGNDでつないで配線を省略するのも良いかも?
++++++++++++++++++++
210112
MMJOY2のファームウェア書き込みにちょっとつまずいたので、前に遡ったそこの文を加筆しました。
思ったのですが、MMJOY2のボードのVccと操縦桿の方のVccはつなぐ必要は無いのかも。
妙にオフセットが出る場合、ココを変えてみるのもテかも。
−−−−−−−−−−−−−−−−−−−−
スコードロン、VRでは連合軍Xウィングはかなりの視界。
まだ、ピッチ操作にオーバーシュートを起こしやすいけど。
ジョイパッドではまぐれ当たりを望む感じでしたが、
自作感圧操縦桿にて追いかけながら当たる当たる。
しかも、ドッグファイトは、近距離で狙えます。
でも反射神経モノなので、疲れると意識が集中できず〜w
++++++++++++++++++++
感圧式ラダーペダル-:??
I型のロードセルは筐体に強度が必要で、S字型は高価なので…、
ペダルの片方だけロードセルを付けて伸縮を読んでも良いとは思うけど非対称でなんだか…、
SC902という、4個で使うロードセル。
これで上手く行けば…、、
 合金鋼のカンチ式(片持ち梁)と言う感じ。
構造は恐らく、
1個のユニットが歪みゲージが変形部分の表裏に付いて1/2のホイートストンブリッジでハーフブリッジというもの
一個のユニットでハーフブリッジだから、結線によっては、4個で差動電圧も出せるし、電圧半分で2個でも使えるかと。
とりあえず4個で使うなら、左に対し、右を逆の極性にすればイケるハズ。
結局、形成されるのは1個のロードセルなので、増幅回路は簡素化される。
気になるのは、感度の方。
定格出力電圧が普通のロードセルより半分のような気もしますが、、、増幅感度は気になりますね。
いままで、精度のあまりない−電源も使って、最大限にロードセルを使ってることに気が付きました。
オフセットの原因になるかも?<現時点気になるほどでもない。
HX711というロードセル用ADCはどうなのだろう?
木は、端材が数十円なので、多用しました。
端材じゃないのは、シーソー部分とその支点のみです。
シーソー部分は朴材という硬めの木です。支点は厚さや幅がちょうど良いモノを。
ロードセルは出力インピーダンスが設定されてますが、どうなのでしょうね。ホイートストンブリッジは基本、電圧差で見てるような?電流かも?
まあ、扱うのがジョイスティックやペダルのようにリニアリティーが雑でも構わないモノでは関係ないレベルなのかも。
というか、この出力インピーダンスはロードセル自身の持つインピーダンスだと思うから、外部に取り付ける必要は無いと思われる。
ペダルは、垂直に踏むとなると足の重さが出てしまうかも知れない。
なので、水平に蹴る感じのが良いのかも知れないが、、
鈍なイメージがするけど、素早く操作できるのだろうか?
力は蹴る方が入るとは思うけど、実際には、踏むのと蹴るのの中間あたりが良さそう。
ただ、シューティングだとセンターにこだわったり、車のような操作が可能で、
実機では、横風やらでセンターリターンがどれほど意味があるのか?
また、スティックやペダル、腕や足にもGがかかる。なにせ、発艦時は加速力でレバーを引かないようにスティックは握らないというし、
スティックだけや、ペダルなら、ある程度は釣り合い出来るけど。。
つまり、シューティング用、シミュレーター、ドローン用、実機搭乗用。と理想が皆違う気がしてならない。
++++++++++++++++++++
センサーが台座の下まではみ出る仕様のため、貼り付ける板には、ざぐり加工が必要になりました。
合金鋼のカンチ式(片持ち梁)と言う感じ。
構造は恐らく、
1個のユニットが歪みゲージが変形部分の表裏に付いて1/2のホイートストンブリッジでハーフブリッジというもの
一個のユニットでハーフブリッジだから、結線によっては、4個で差動電圧も出せるし、電圧半分で2個でも使えるかと。
とりあえず4個で使うなら、左に対し、右を逆の極性にすればイケるハズ。
結局、形成されるのは1個のロードセルなので、増幅回路は簡素化される。
気になるのは、感度の方。
定格出力電圧が普通のロードセルより半分のような気もしますが、、、増幅感度は気になりますね。
いままで、精度のあまりない−電源も使って、最大限にロードセルを使ってることに気が付きました。
オフセットの原因になるかも?<現時点気になるほどでもない。
HX711というロードセル用ADCはどうなのだろう?
木は、端材が数十円なので、多用しました。
端材じゃないのは、シーソー部分とその支点のみです。
シーソー部分は朴材という硬めの木です。支点は厚さや幅がちょうど良いモノを。
ロードセルは出力インピーダンスが設定されてますが、どうなのでしょうね。ホイートストンブリッジは基本、電圧差で見てるような?電流かも?
まあ、扱うのがジョイスティックやペダルのようにリニアリティーが雑でも構わないモノでは関係ないレベルなのかも。
というか、この出力インピーダンスはロードセル自身の持つインピーダンスだと思うから、外部に取り付ける必要は無いと思われる。
ペダルは、垂直に踏むとなると足の重さが出てしまうかも知れない。
なので、水平に蹴る感じのが良いのかも知れないが、、
鈍なイメージがするけど、素早く操作できるのだろうか?
力は蹴る方が入るとは思うけど、実際には、踏むのと蹴るのの中間あたりが良さそう。
ただ、シューティングだとセンターにこだわったり、車のような操作が可能で、
実機では、横風やらでセンターリターンがどれほど意味があるのか?
また、スティックやペダル、腕や足にもGがかかる。なにせ、発艦時は加速力でレバーを引かないようにスティックは握らないというし、
スティックだけや、ペダルなら、ある程度は釣り合い出来るけど。。
つまり、シューティング用、シミュレーター、ドローン用、実機搭乗用。と理想が皆違う気がしてならない。
++++++++++++++++++++
センサーが台座の下まではみ出る仕様のため、貼り付ける板には、ざぐり加工が必要になりました。


 接着時間を短く確実に、と言うのは温度と関係しているので部屋の上の方に置くと、かなり温度が上がる。そして24時間置く。
接着剤メーカーのツイートで、どの接着剤も、24時間は置いた方が良いらしいので。
接着時間を短く確実に、と言うのは温度と関係しているので部屋の上の方に置くと、かなり温度が上がる。そして24時間置く。
接着剤メーカーのツイートで、どの接着剤も、24時間は置いた方が良いらしいので。
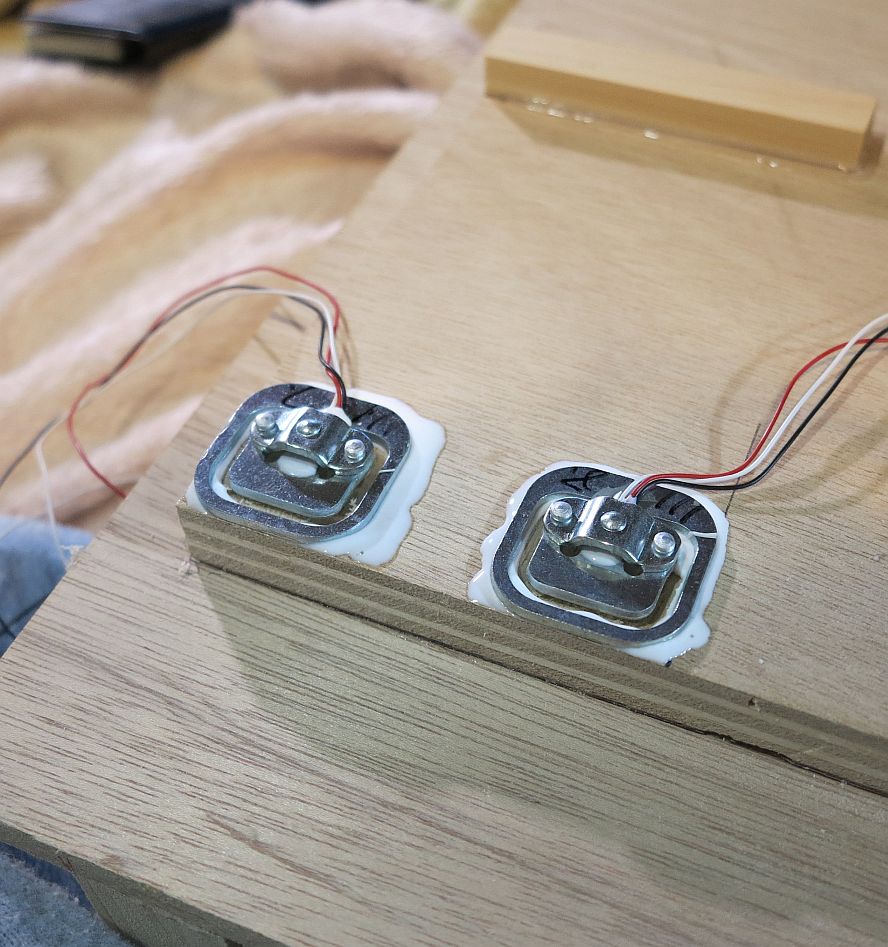 多用途の片側が木部であることは、多分、そうしないと、乾燥が窒息すると言うことでは無いかと思いますので、そこのとこ重要です。
接続は、こんな感じで、左側を極性反転。
多用途の片側が木部であることは、多分、そうしないと、乾燥が窒息すると言うことでは無いかと思いますので、そこのとこ重要です。
接続は、こんな感じで、左側を極性反転。
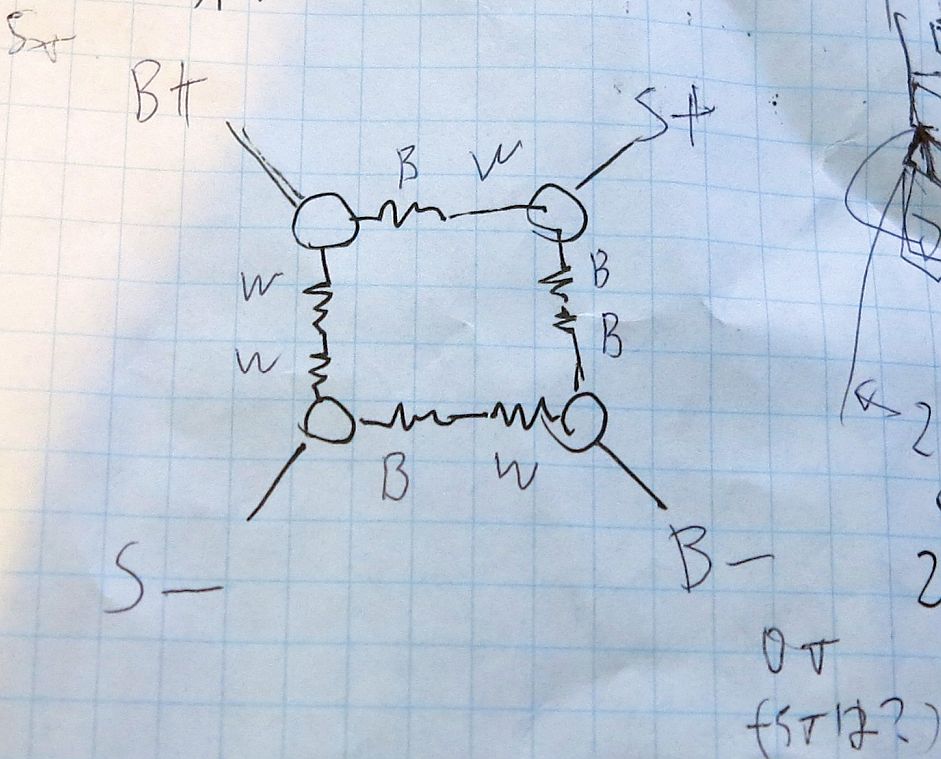 で、まだ完全硬化してないですが、電圧を印加してテスト。
で、まだ完全硬化してないですが、電圧を印加してテスト。
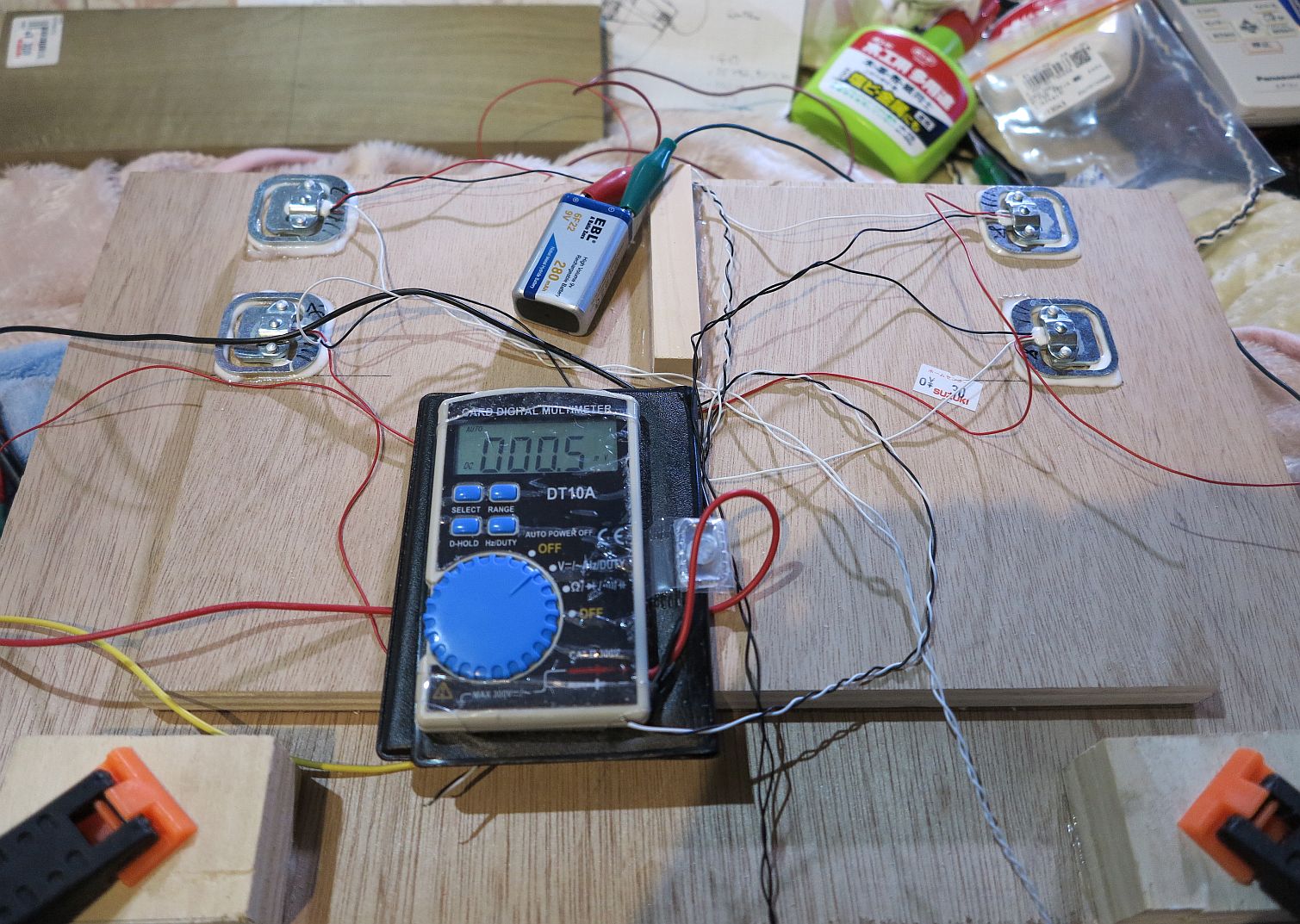 9Vで、手で押してみて、左右の振れ幅は、0.5〜0.8mVと言ったところかな。。。
オフセットは、既に0.5mVあります。
ここで、注意すべきトコなのだけれど、
この金属使える木工用接着剤、肉痩せが少ないので、はみ出て、変形部分と固定部分がくっついているから、
半乾きの時点で、クラフトナイフで剥がしておくように。
それか、かなり肉痩せする瞬着のようなモノや、シリコーンゴム系の柔らかい接着剤を使うか、とか。。
乾いて、足を乗せてやってみるに、10V給電換算で最低1.3mVは振れそう。
となると、オフセットを加算回路で取り除く過程で1/2になり、
2段目の増幅は、10倍でちょうど良いか、低めでもかまわなさそうではある。
−−−−−−−−−−−−−−−−−−−−
で、
AMP回路はこんな感じ。
9Vで、手で押してみて、左右の振れ幅は、0.5〜0.8mVと言ったところかな。。。
オフセットは、既に0.5mVあります。
ここで、注意すべきトコなのだけれど、
この金属使える木工用接着剤、肉痩せが少ないので、はみ出て、変形部分と固定部分がくっついているから、
半乾きの時点で、クラフトナイフで剥がしておくように。
それか、かなり肉痩せする瞬着のようなモノや、シリコーンゴム系の柔らかい接着剤を使うか、とか。。
乾いて、足を乗せてやってみるに、10V給電換算で最低1.3mVは振れそう。
となると、オフセットを加算回路で取り除く過程で1/2になり、
2段目の増幅は、10倍でちょうど良いか、低めでもかまわなさそうではある。
−−−−−−−−−−−−−−−−−−−−
で、
AMP回路はこんな感じ。
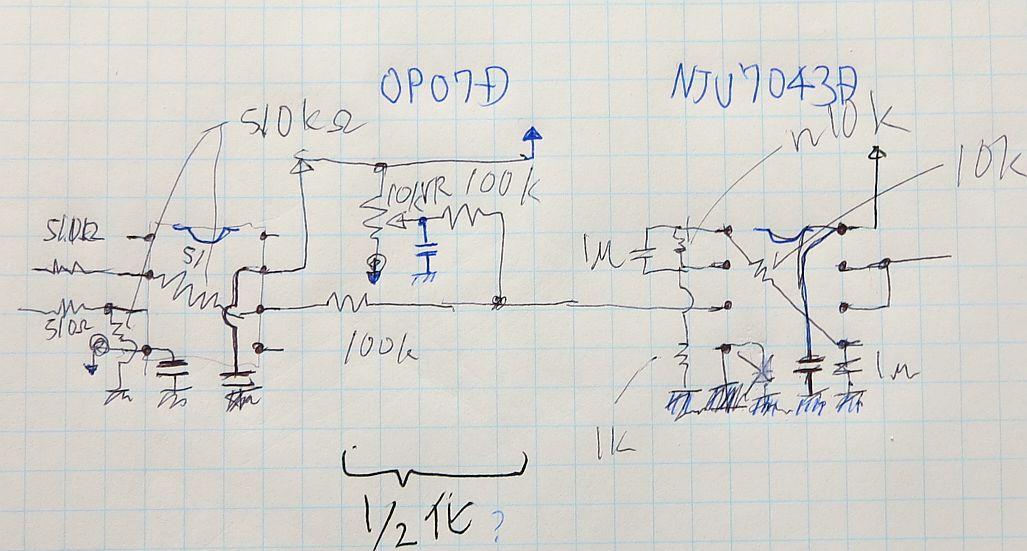
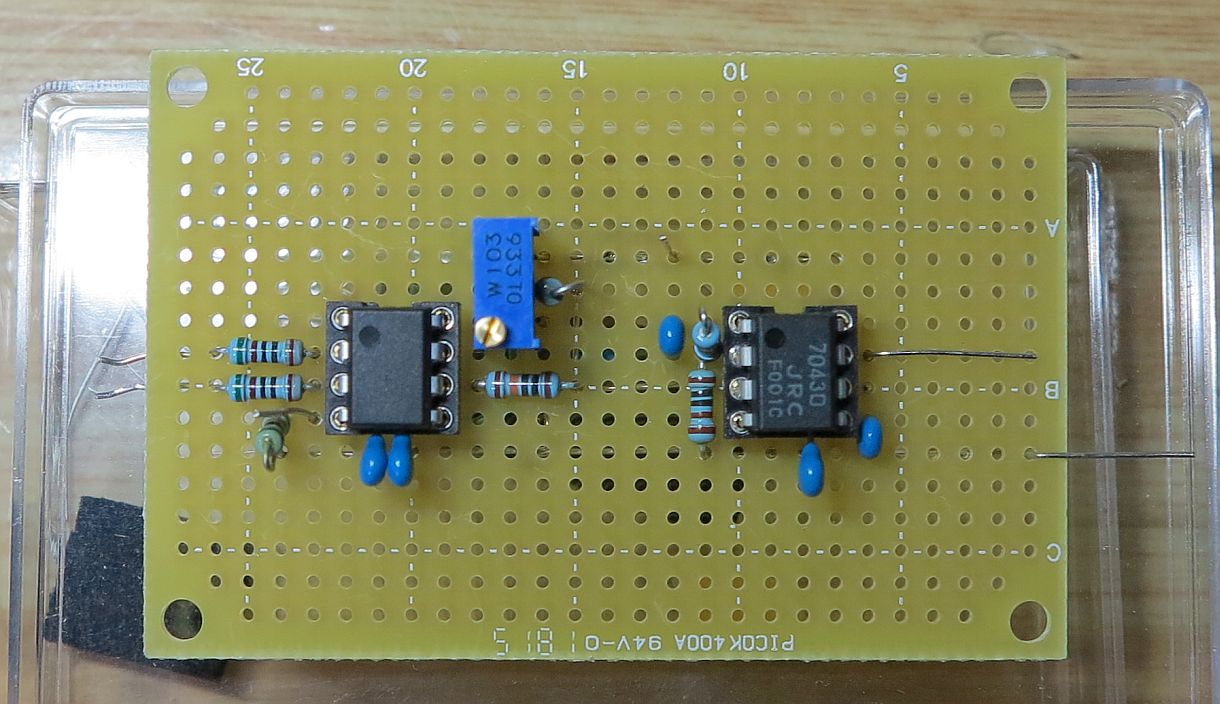 問題は、本体とつなぐ、3芯シールドケーブルと、コネクター。
ちょうど良いのが見当たらない。。。
こんな感じで、シーソーを、、
問題は、本体とつなぐ、3芯シールドケーブルと、コネクター。
ちょうど良いのが見当たらない。。。
こんな感じで、シーソーを、、
 ナットを置いて、ペダル部分と、ほぼ点接触に。
まず、この接着剤で緩く固定、大きな穴にネジ釘でまたこの接着剤を流し込み軽く補強を…、、
と思ったが、接着剤のみで、がっちりくっついてしまって困るほどに。
ナットを置いて、ペダル部分と、ほぼ点接触に。
まず、この接着剤で緩く固定、大きな穴にネジ釘でまたこの接着剤を流し込み軽く補強を…、、
と思ったが、接着剤のみで、がっちりくっついてしまって困るほどに。
 ナットを置いて、ペダル部分と、ほぼ点接触に。
まず、この接着剤で緩く固定、大きな穴にネジ釘でまたこの接着剤を流し込み軽く補強を…、、
と思ったが、接着剤のみで、がっちりくっついてしまって困るほどに。
ナットを置いて、ペダル部分と、ほぼ点接触に。
まず、この接着剤で緩く固定、大きな穴にネジ釘でまたこの接着剤を流し込み軽く補強を…、、
と思ったが、接着剤のみで、がっちりくっついてしまって困るほどに。
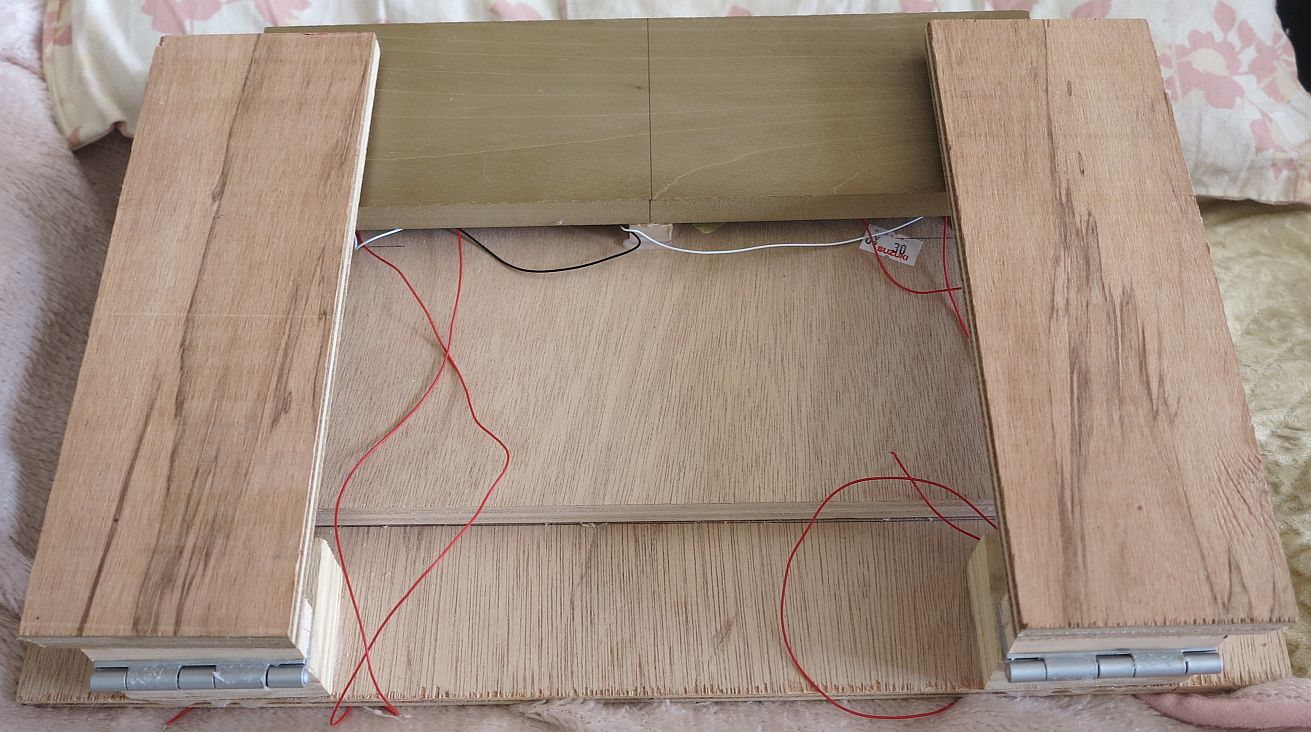 踏むか、蹴るか?のバランスは、で実際やってみないとわからないし、ゲームに使うことを重要視したので、
つま先を主に使って踏む方向性が強い感じで、素早く微妙にコントロールを…、と思っていましたが、
問題が有るとしたら、接着剤の強力すぎな所かな?
実際の製品のラダーは、つま先の角度は関係ない要素が強いですね。
まあ、かかとをドコに置くかとかも関係あるかな?
実際に踏んでみて、、
体とのポジション関係によって力は結構何倍にも変わるのですが、
3mm程度の踏み込みのガタを儲けているため、
やっぱ、接着剤によるセンターに戻ろうとする力が圧力の閾値になってる問題が強くありそうです。
感圧式として中立の領域の広さが問題ありそうなら、ロードセルとシーソーの間に板をかまそうと思います。硬めのヤツを。
3mmのアクリル板をはめ込みましたら、、遊びがゼロになりました。シーソーとしては、どうなのだろう?
電圧の中立は保たれてます。
あと、木がよじれてるので、ロードセルの1/2使用という感じもしますが、それはそれほど問題は無いです。
温湿度で変わるのが木なので、そこは考えてた感じです。
よく見てみるに、片側踏むと、もう片方は軽く浮き上がるので、問題無さそう。
電圧振幅は、1mVは出る感じ。なので、良さそうです。
++++++++++++++++++++
高い位置に置いて、蹴り込む感じにしたら力も大きく、感圧なら素早さも、イケるかもという案も思いつきましたが、
ただ、設備的にも固定的にも重い物になりますので、ゲームとかドローンとかには向かない。
簡単に移動できる。
人間の感覚として、かかとで蹴って、つま先で細かくバランスする感覚があると思われることから、
それをペダルなデバイスに有用に使えないかと思ってみたりする。
細かさと俊敏さのコントロールを併せ持つようにも考えました。
実機にこだわらず、また、重装備で無い扱いの軽快さも。
FBWで遠隔な部分が出ています。
(FBWじゃなきゃとにかく力が必要。遠隔やゲームとしての拡張された部分も。)
−−−−−−−−−−−−−−−−−−−−
コネクタで悩んでますが、ケースパネル貼り付けでは無ければ、ポピュラーで安くとなるとXHコネクタかなー…、、
Dサブは…、、キャノンコネクタは音響系のモノがはまってしまう?
ヒロセ電気のは昔使ってましたが、
航空コネクタなんてのも使ってた記憶が?<Amazonで結構安い
直径色々あるので扱いやすいのを。16mmがポピュラーかな?でも4Pなら12mmでも。
安全性から、受動回路側のプラグが雄のが良いですね。
故に、オスプラグ、メス、パネルが良いんだけど…。無さそう。
…無さそうなので、GX12-4Pという感じで12mmのオスパネル、メスプラグを8個1150円で。
同じ寸法のでも、良いのは電流値も大きいようですが。
線は、100均のUSB急速充電可能ケーブルから切るのはどうだろう?
やっぱ、長いUSB延長ケーブルから切り出してみました。
−−−−−−−−−−−−−−−−−−−−
21/01/17
航空コネクタを付けて、トグルSWで切り替えられるように。
踏むか、蹴るか?のバランスは、で実際やってみないとわからないし、ゲームに使うことを重要視したので、
つま先を主に使って踏む方向性が強い感じで、素早く微妙にコントロールを…、と思っていましたが、
問題が有るとしたら、接着剤の強力すぎな所かな?
実際の製品のラダーは、つま先の角度は関係ない要素が強いですね。
まあ、かかとをドコに置くかとかも関係あるかな?
実際に踏んでみて、、
体とのポジション関係によって力は結構何倍にも変わるのですが、
3mm程度の踏み込みのガタを儲けているため、
やっぱ、接着剤によるセンターに戻ろうとする力が圧力の閾値になってる問題が強くありそうです。
感圧式として中立の領域の広さが問題ありそうなら、ロードセルとシーソーの間に板をかまそうと思います。硬めのヤツを。
3mmのアクリル板をはめ込みましたら、、遊びがゼロになりました。シーソーとしては、どうなのだろう?
電圧の中立は保たれてます。
あと、木がよじれてるので、ロードセルの1/2使用という感じもしますが、それはそれほど問題は無いです。
温湿度で変わるのが木なので、そこは考えてた感じです。
よく見てみるに、片側踏むと、もう片方は軽く浮き上がるので、問題無さそう。
電圧振幅は、1mVは出る感じ。なので、良さそうです。
++++++++++++++++++++
高い位置に置いて、蹴り込む感じにしたら力も大きく、感圧なら素早さも、イケるかもという案も思いつきましたが、
ただ、設備的にも固定的にも重い物になりますので、ゲームとかドローンとかには向かない。
簡単に移動できる。
人間の感覚として、かかとで蹴って、つま先で細かくバランスする感覚があると思われることから、
それをペダルなデバイスに有用に使えないかと思ってみたりする。
細かさと俊敏さのコントロールを併せ持つようにも考えました。
実機にこだわらず、また、重装備で無い扱いの軽快さも。
FBWで遠隔な部分が出ています。
(FBWじゃなきゃとにかく力が必要。遠隔やゲームとしての拡張された部分も。)
−−−−−−−−−−−−−−−−−−−−
コネクタで悩んでますが、ケースパネル貼り付けでは無ければ、ポピュラーで安くとなるとXHコネクタかなー…、、
Dサブは…、、キャノンコネクタは音響系のモノがはまってしまう?
ヒロセ電気のは昔使ってましたが、
航空コネクタなんてのも使ってた記憶が?<Amazonで結構安い
直径色々あるので扱いやすいのを。16mmがポピュラーかな?でも4Pなら12mmでも。
安全性から、受動回路側のプラグが雄のが良いですね。
故に、オスプラグ、メス、パネルが良いんだけど…。無さそう。
…無さそうなので、GX12-4Pという感じで12mmのオスパネル、メスプラグを8個1150円で。
同じ寸法のでも、良いのは電流値も大きいようですが。
線は、100均のUSB急速充電可能ケーブルから切るのはどうだろう?
やっぱ、長いUSB延長ケーブルから切り出してみました。
−−−−−−−−−−−−−−−−−−−−
21/01/17
航空コネクタを付けて、トグルSWで切り替えられるように。
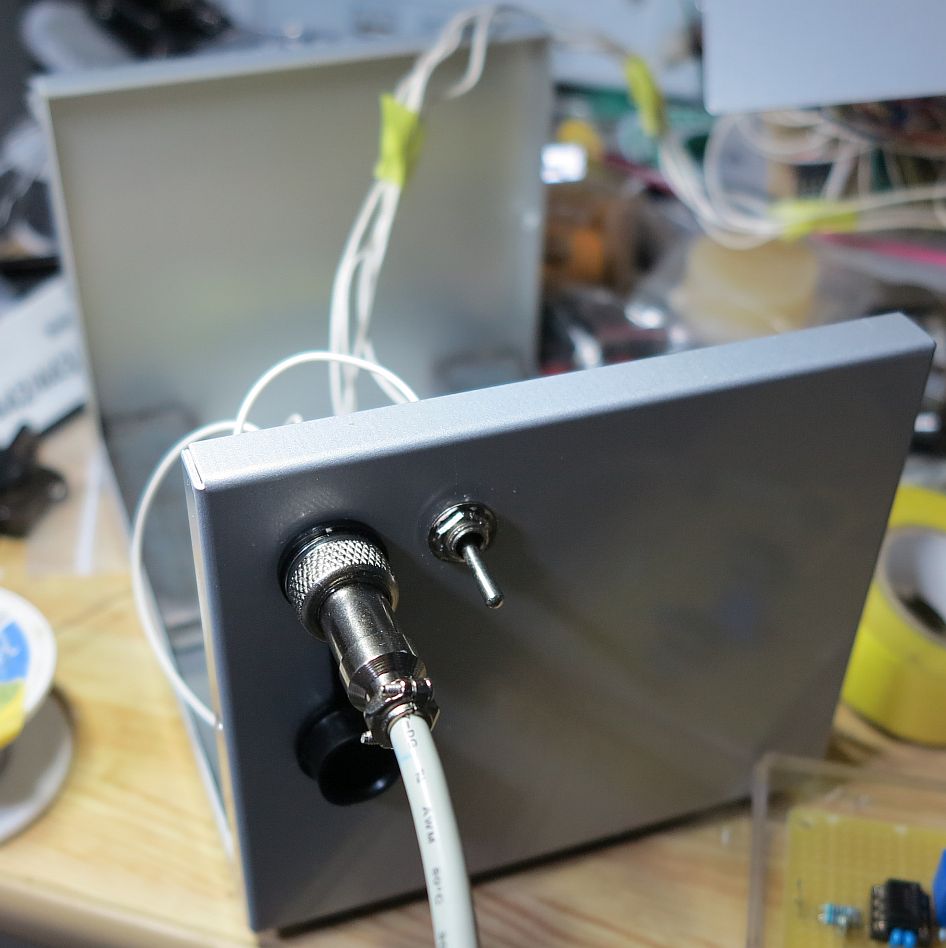 スイッチを一つ追加。片方の端子であるGNDはケースから取っている。
スイッチを一つ追加。片方の端子であるGNDはケースから取っている。
 回路はシールド的に剥き出しだけど、二段の積分フィルターのためか、ノイズは見られなかった。
まあ、ロードセルは、インピーダンスも低いし。
回路はシールド的に剥き出しだけど、二段の積分フィルターのためか、ノイズは見られなかった。
まあ、ロードセルは、インピーダンスも低いし。
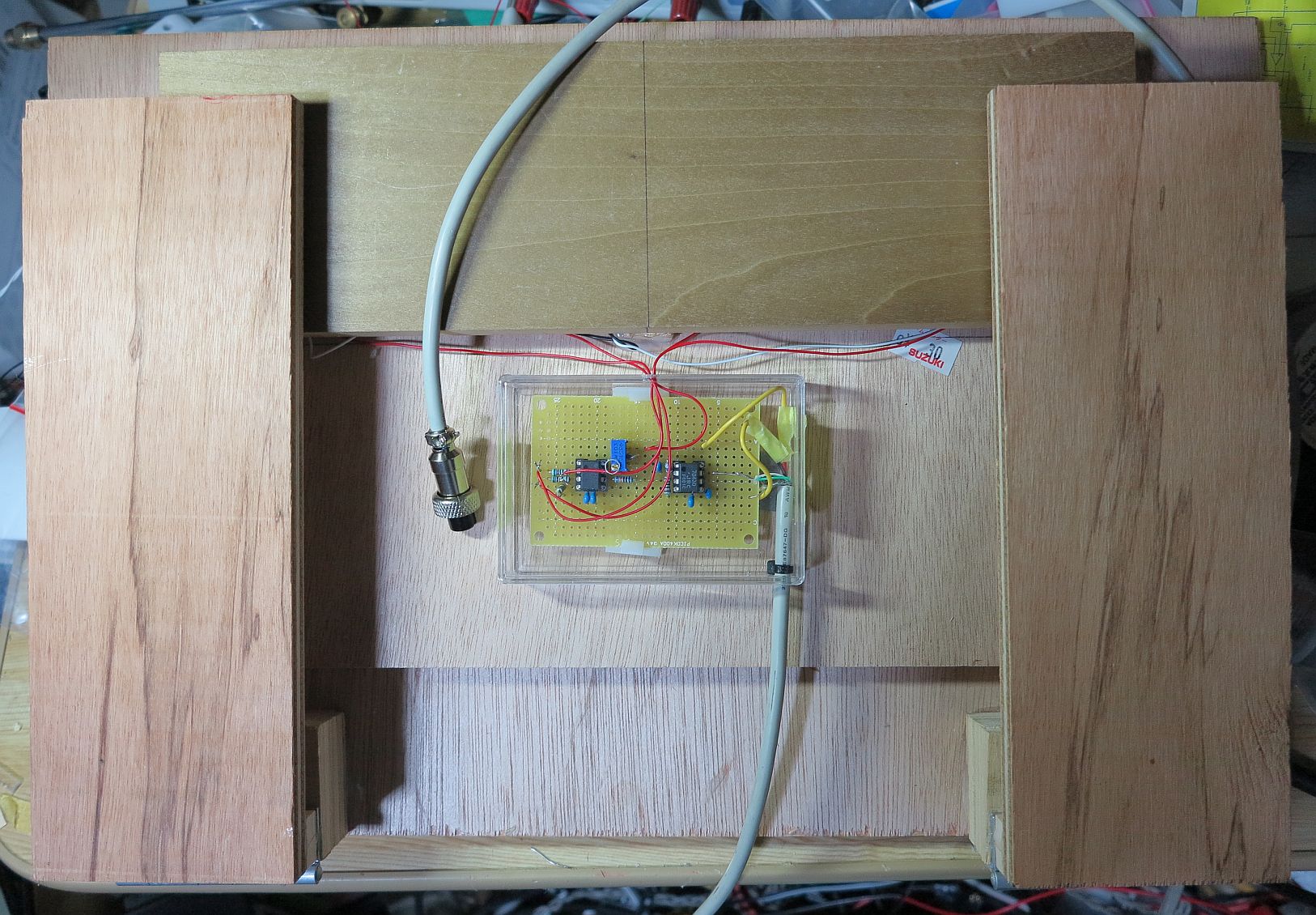 テストして、
足を乗っけて、足の重みで、ちょっと板がたわむようなのでシーソーが、ほぼ機能していない。
うーん…。もうちょっと薄いアクリル板かな?
このまま足の重みを避けるため、ペダルを高く上げて蹴る方式にすると?
とりあえず、スペースの関係で、もう、ユニットは前とか上とかには移動が出来ない。
でスコードロンをプレイ。
ツイストからの移行になれてないのでそれが特に問題。
それとやはり足での操作は鈍なイメージがある。ツイストの1/2の反応速度のような。
よって、操作が雑でオーバーシュートする。
ProjectWingmanなど、
シューティング系フライトシムの着陸なら舵が混ざらないので有効にイケるかもだが、機銃での操作は不利かと。
感度の方は、少々力が必要だけど、微妙さも考えるに、あってる気がする。
素早さと繊細さを考えるとつま先のみになりそう。
打楽器のペダルみたいな感じ??シーソーも重要。よって、たわむのなら大きめの遊びは重要。
接着剤できっちり張り付いてるので、どうしたものか…、
バランスを細かく踏ん張るのもつま先なので。
細かく言うと、かかと、指の付け根、指先に分かれると思われる。
コントロール的に押す部分は、足先に集中させたい。
実機だと、靴履いてますね。だからといって、踏ん張れないわけでもない。
今、アクリル板を剥がしたとこ…、
剥がしただけだと、とんでもなくセンターが強い。
妙にねちっこい接着剤では無く、瞬着で二点接続だったからよかった。
今度は1.5〜2mm程度が良いかな?
あとは、今のとこシーソーを意識しないと。反対側の足の力も無視できない。
従来のペダルのように、引く力は無い?
完全につま先の力だと、足の重みまで影響するから膝の固定が必要になるようで、程々に。
はめてたアクリル板は3mmではなく2mmでしたでもたわみは、3mm位有るので、板に食い込んでる部分があったようです。
で、0.8mm程度の下敷きをカットしてマスキングテープで仮固定したら、まあまあ良い感じ。1mmだと理想かも。
力学上は、差動回路なので、シーソーは要らないのですが、人間の感覚や回路の安定なバランスのため儲けております。
感度はもうちょっと高い方が良いかも??
感度とカーブで解決かも知れない。
追記>
回路の約2倍に感度を上げました。
センターがちょっと強いですが、格段によくなりました。
MMJOY2側で下げることも考慮するならもっと上げても良いかも。
切り返しチェック。
テストして、
足を乗っけて、足の重みで、ちょっと板がたわむようなのでシーソーが、ほぼ機能していない。
うーん…。もうちょっと薄いアクリル板かな?
このまま足の重みを避けるため、ペダルを高く上げて蹴る方式にすると?
とりあえず、スペースの関係で、もう、ユニットは前とか上とかには移動が出来ない。
でスコードロンをプレイ。
ツイストからの移行になれてないのでそれが特に問題。
それとやはり足での操作は鈍なイメージがある。ツイストの1/2の反応速度のような。
よって、操作が雑でオーバーシュートする。
ProjectWingmanなど、
シューティング系フライトシムの着陸なら舵が混ざらないので有効にイケるかもだが、機銃での操作は不利かと。
感度の方は、少々力が必要だけど、微妙さも考えるに、あってる気がする。
素早さと繊細さを考えるとつま先のみになりそう。
打楽器のペダルみたいな感じ??シーソーも重要。よって、たわむのなら大きめの遊びは重要。
接着剤できっちり張り付いてるので、どうしたものか…、
バランスを細かく踏ん張るのもつま先なので。
細かく言うと、かかと、指の付け根、指先に分かれると思われる。
コントロール的に押す部分は、足先に集中させたい。
実機だと、靴履いてますね。だからといって、踏ん張れないわけでもない。
今、アクリル板を剥がしたとこ…、
剥がしただけだと、とんでもなくセンターが強い。
妙にねちっこい接着剤では無く、瞬着で二点接続だったからよかった。
今度は1.5〜2mm程度が良いかな?
あとは、今のとこシーソーを意識しないと。反対側の足の力も無視できない。
従来のペダルのように、引く力は無い?
完全につま先の力だと、足の重みまで影響するから膝の固定が必要になるようで、程々に。
はめてたアクリル板は3mmではなく2mmでしたでもたわみは、3mm位有るので、板に食い込んでる部分があったようです。
で、0.8mm程度の下敷きをカットしてマスキングテープで仮固定したら、まあまあ良い感じ。1mmだと理想かも。
力学上は、差動回路なので、シーソーは要らないのですが、人間の感覚や回路の安定なバランスのため儲けております。
感度はもうちょっと高い方が良いかも??
感度とカーブで解決かも知れない。
追記>
回路の約2倍に感度を上げました。
センターがちょっと強いですが、格段によくなりました。
MMJOY2側で下げることも考慮するならもっと上げても良いかも。
切り返しチェック。
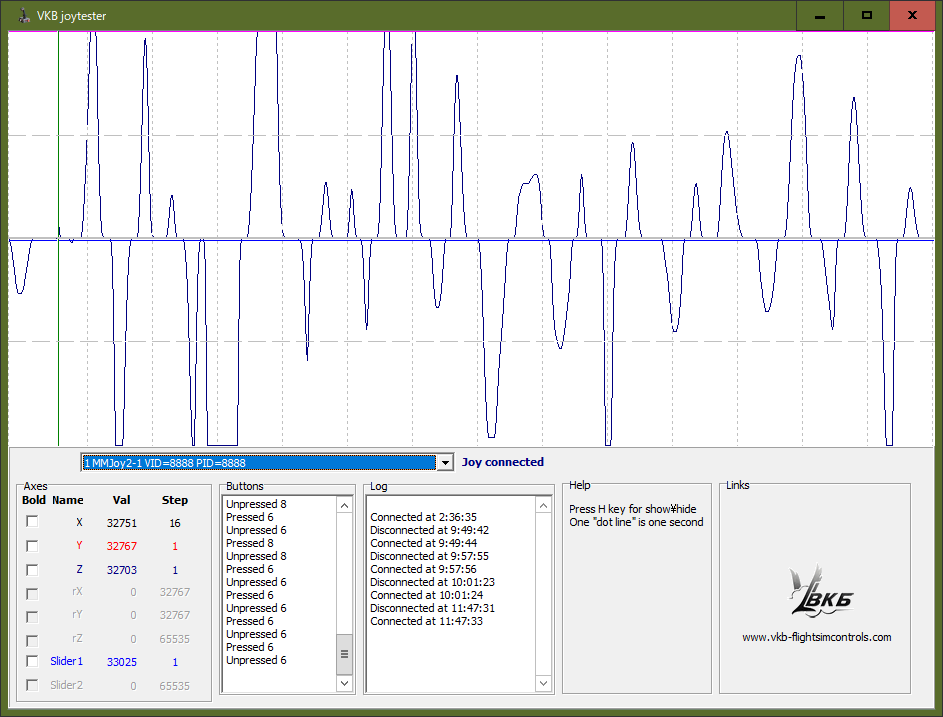 感圧ツイストの方が3倍くらい素早いかも。
感圧ツイストの方が3倍くらい素早いかも。
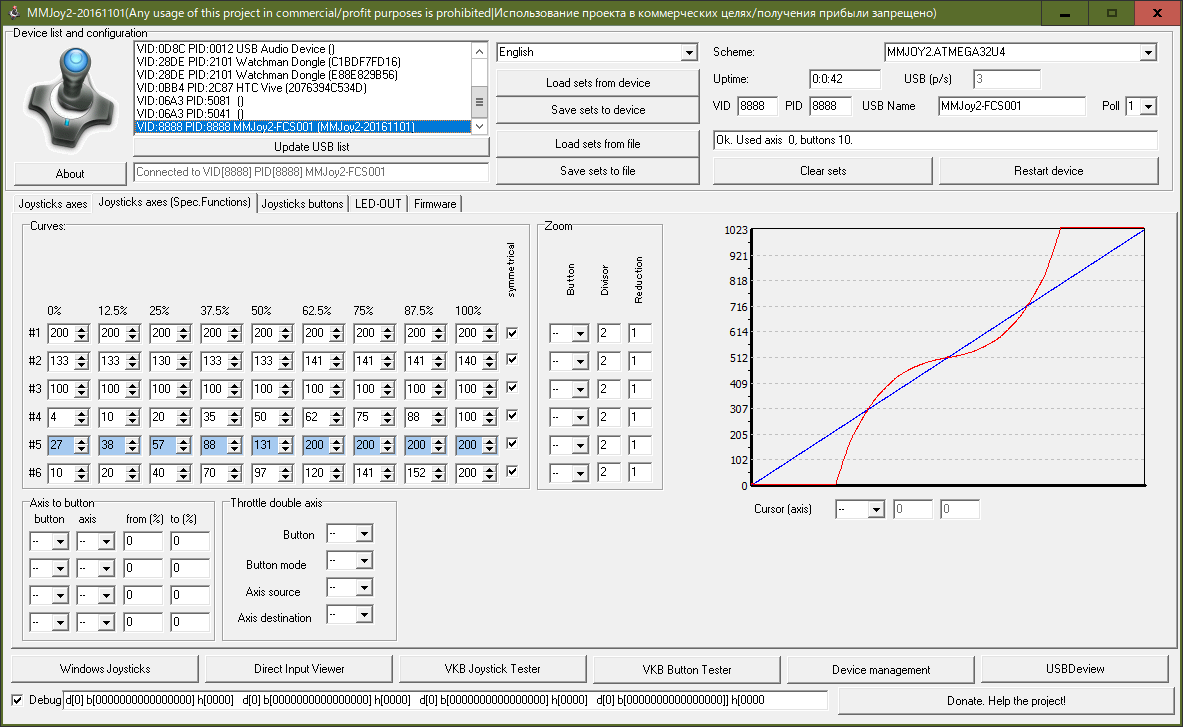 プラ板T=0.7mmだったので、二段重ねにしました。良い感じ。
++++++++++++++++++++
ペダルとツイストのセレクターSWを切り替えながら飛んでみる。
ペダルでのスコードロンは、ゲームが結構機敏に反応する設定なので、やっぱ蛇行して当たらない。
(このゲームは、ピッチとヨーの操作でやるのが基本のようで、そこが機敏。)
原因は多分、足では操作が遅く、早く動かそうとすると、大雑把でオーバーシュートします。
しかも、ツイストになれてるので、無効なのにひねって動かないという…。
ProjectWingmanでは、設定によるのか穏やかな反応なので、機銃の扱いではそれなりだけど、やはり鈍。
いままででわかってきたこと。
・スティックによるツイスト:素早い操作ができる。素早く動く標的に向くかと。
・ペダル:舵が混ざらず、ゆっくりの操作なら正確。定期航路を飛ぶ感じなど。
総じて、シューティング系では、ツイストが良い。
ペダルとツイストのリアルタイムな切り替えは面白いので、この二つの操作のMIXなどがあると便利かも。
感圧ペダルの課題は、与えた力にたいし、乗せてる反対の足の力が邪魔してることに気が付かないことが多い。
これを考えると、ヒンジの支点に重心を置くのが良いかも知れない?
F-16はどうなのでしょうね。強い方を優先させるとかそういう回路があったらどうなのだろう?
旨く操作すれば、可動式ペダルよりも、比較的素早くて、細かい操作が可能。
また、つま先での可動式は、結構良い結果を出すかも。
あと、どの位置に足を置いたら良いのかも重要。
−−−−−−−−−−−−−−−−−−−−
ペダルは、もっと足上げてが良いのだろうけど、
足を前に出して、角度つける感じでどうにか…、、とも。
追記>
感度を1.5倍上げて、一部のフィルターのCを1/3にしたら
まあまあ良い感じに。
足故に感圧式だとしても切り返しの俊敏性が、やや鈍なんだけど、スパーンと良い角度で止まるには、ある程度は慣れかな??
++++++++++++++++++++
すこしずつ探りながら理想的なカーブへと詰めて行く。
プラ板T=0.7mmだったので、二段重ねにしました。良い感じ。
++++++++++++++++++++
ペダルとツイストのセレクターSWを切り替えながら飛んでみる。
ペダルでのスコードロンは、ゲームが結構機敏に反応する設定なので、やっぱ蛇行して当たらない。
(このゲームは、ピッチとヨーの操作でやるのが基本のようで、そこが機敏。)
原因は多分、足では操作が遅く、早く動かそうとすると、大雑把でオーバーシュートします。
しかも、ツイストになれてるので、無効なのにひねって動かないという…。
ProjectWingmanでは、設定によるのか穏やかな反応なので、機銃の扱いではそれなりだけど、やはり鈍。
いままででわかってきたこと。
・スティックによるツイスト:素早い操作ができる。素早く動く標的に向くかと。
・ペダル:舵が混ざらず、ゆっくりの操作なら正確。定期航路を飛ぶ感じなど。
総じて、シューティング系では、ツイストが良い。
ペダルとツイストのリアルタイムな切り替えは面白いので、この二つの操作のMIXなどがあると便利かも。
感圧ペダルの課題は、与えた力にたいし、乗せてる反対の足の力が邪魔してることに気が付かないことが多い。
これを考えると、ヒンジの支点に重心を置くのが良いかも知れない?
F-16はどうなのでしょうね。強い方を優先させるとかそういう回路があったらどうなのだろう?
旨く操作すれば、可動式ペダルよりも、比較的素早くて、細かい操作が可能。
また、つま先での可動式は、結構良い結果を出すかも。
あと、どの位置に足を置いたら良いのかも重要。
−−−−−−−−−−−−−−−−−−−−
ペダルは、もっと足上げてが良いのだろうけど、
足を前に出して、角度つける感じでどうにか…、、とも。
追記>
感度を1.5倍上げて、一部のフィルターのCを1/3にしたら
まあまあ良い感じに。
足故に感圧式だとしても切り返しの俊敏性が、やや鈍なんだけど、スパーンと良い角度で止まるには、ある程度は慣れかな??
++++++++++++++++++++
すこしずつ探りながら理想的なカーブへと詰めて行く。
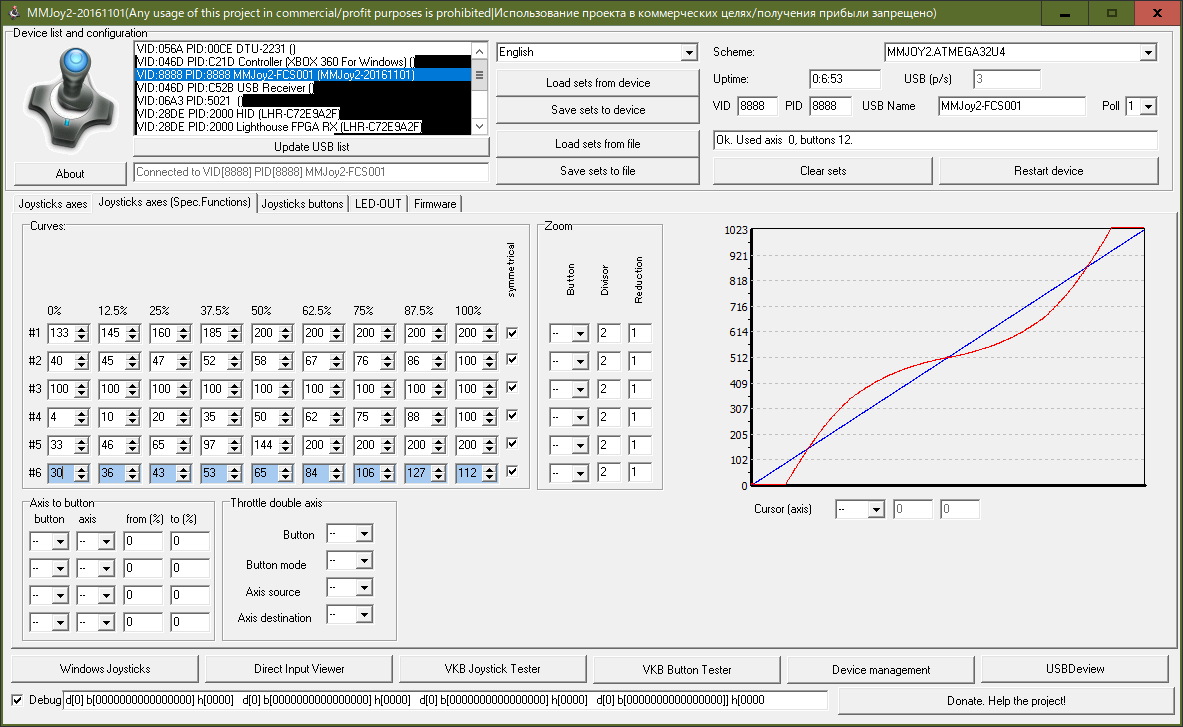 反射神経による敏捷性が必要なシューティングでは、ペダルは補助で、細かいところはロールでまかなった方が良いかも。
あるいは、感度を物凄く落とすとか。
器用で素早い操作は、やはり手なのですが、
シューティングでは無く、実際の機体にて、それがどれほど必要性のアルモノなのかは不明です。
ドローンや電子制御の強く入った機体ならそれなりに意味があるのかも?
敏感なピッチにも軽くカーブを
反射神経による敏捷性が必要なシューティングでは、ペダルは補助で、細かいところはロールでまかなった方が良いかも。
あるいは、感度を物凄く落とすとか。
器用で素早い操作は、やはり手なのですが、
シューティングでは無く、実際の機体にて、それがどれほど必要性のアルモノなのかは不明です。
ドローンや電子制御の強く入った機体ならそれなりに意味があるのかも?
敏感なピッチにも軽くカーブを
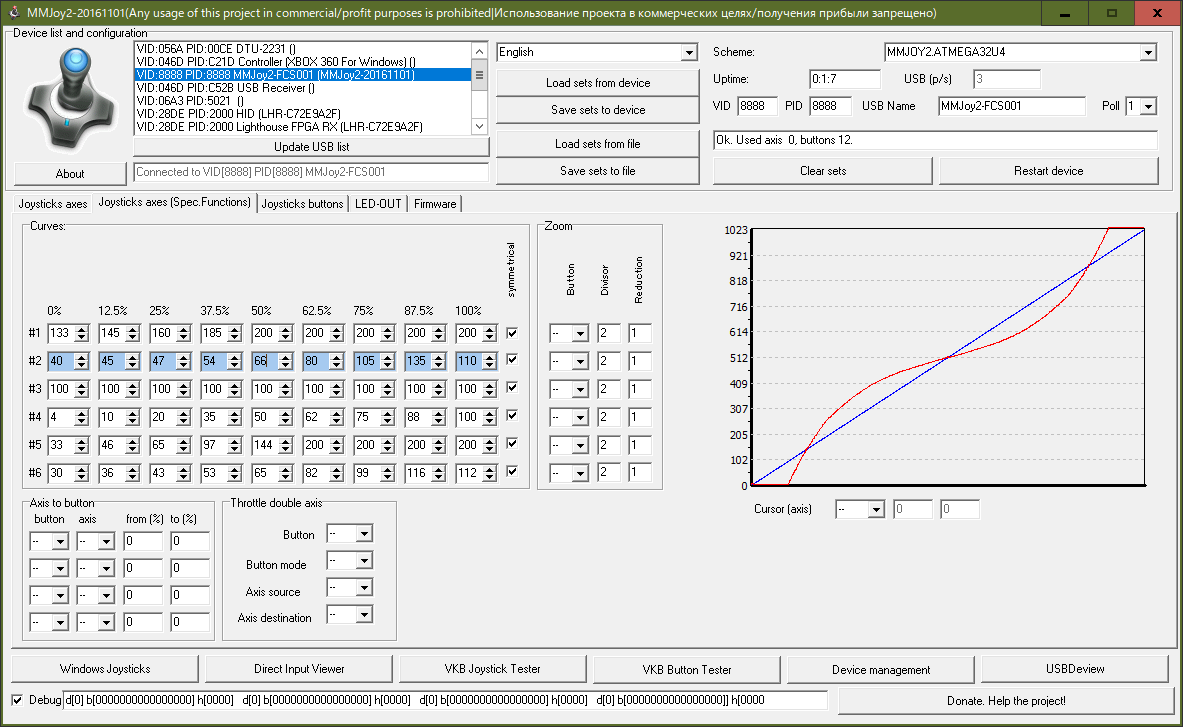 感度は、僅かに低めにして、ドライバーで僅かに高めに調整する。
逆は、底打ちしてしまうため出来ない。
なので、400くらいの設定とか、100%以上の数値設定ができれば幅広くなるのだが…、
I/Fと操縦桿のVccは用心してつないでなかった。ので、つないでみたら、電力の強いけど電圧の低めな、操縦桿のレギュレタ電圧に統一されたみたい。
まあ、ロードセルの回路が結構電気食うからこれで良い感じにおさまったのかも。
スイッチを増やした感。
感度は、僅かに低めにして、ドライバーで僅かに高めに調整する。
逆は、底打ちしてしまうため出来ない。
なので、400くらいの設定とか、100%以上の数値設定ができれば幅広くなるのだが…、
I/Fと操縦桿のVccは用心してつないでなかった。ので、つないでみたら、電力の強いけど電圧の低めな、操縦桿のレギュレタ電圧に統一されたみたい。
まあ、ロードセルの回路が結構電気食うからこれで良い感じにおさまったのかも。
スイッチを増やした感。
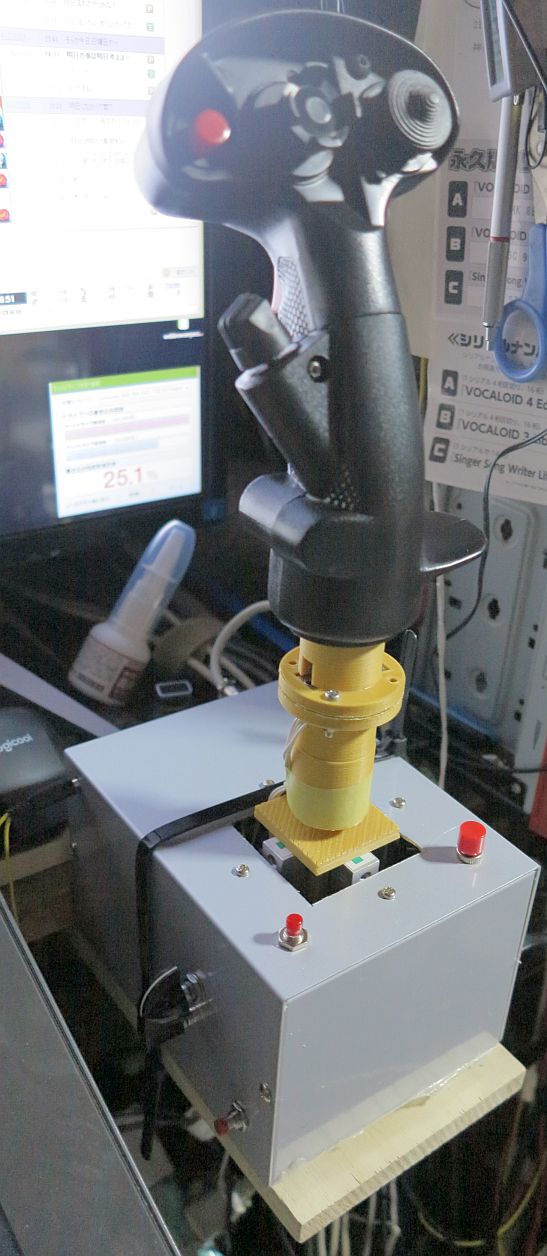 感圧式のペダルにある程度慣れてきて、
ツイストに比べ鈍だけど、正確な感じはする。
ある程度ロールでカバーできるので、そういう機動の戦術もアリだと思う。
なにせ、ジョイパッドでプレイしてる人も考えると。
デバイスへの慣れはとても強く存在し、無視できない。
よって、一見楽な操作で取っ付きやすくても、突き詰めると、不正確となり上達しないケースも考えられる。
今、ピッチとロールは同じカーブなんだけれど、やっぱロールが筋力差で疲れる。
あとは、ピッチ、ヨーの慣性運動が強いのでそれで行ったり来たりも。
スコードロンは、下方向の視界が悪いので、ピッチ操作がオーバーシュートすると視界から消える。
ペダルで、足は不器用なのにゆっくりだと正確だし、大まかな強弱くらいは出来るし、
速くても、踏んでるパルス時間で操作できるという感じもアル。
感圧式ペダルは、シーソー的な差動であることを意識するのが操作で重要かな?
やっぱ、ロールは感度を上げました。
ピッチとちがってEXPカーブがあまりキツくないのも特徴です。(一番キツく設定してるのはヨー軸かな?)
感圧式のペダルにある程度慣れてきて、
ツイストに比べ鈍だけど、正確な感じはする。
ある程度ロールでカバーできるので、そういう機動の戦術もアリだと思う。
なにせ、ジョイパッドでプレイしてる人も考えると。
デバイスへの慣れはとても強く存在し、無視できない。
よって、一見楽な操作で取っ付きやすくても、突き詰めると、不正確となり上達しないケースも考えられる。
今、ピッチとロールは同じカーブなんだけれど、やっぱロールが筋力差で疲れる。
あとは、ピッチ、ヨーの慣性運動が強いのでそれで行ったり来たりも。
スコードロンは、下方向の視界が悪いので、ピッチ操作がオーバーシュートすると視界から消える。
ペダルで、足は不器用なのにゆっくりだと正確だし、大まかな強弱くらいは出来るし、
速くても、踏んでるパルス時間で操作できるという感じもアル。
感圧式ペダルは、シーソー的な差動であることを意識するのが操作で重要かな?
やっぱ、ロールは感度を上げました。
ピッチとちがってEXPカーブがあまりキツくないのも特徴です。(一番キツく設定してるのはヨー軸かな?)
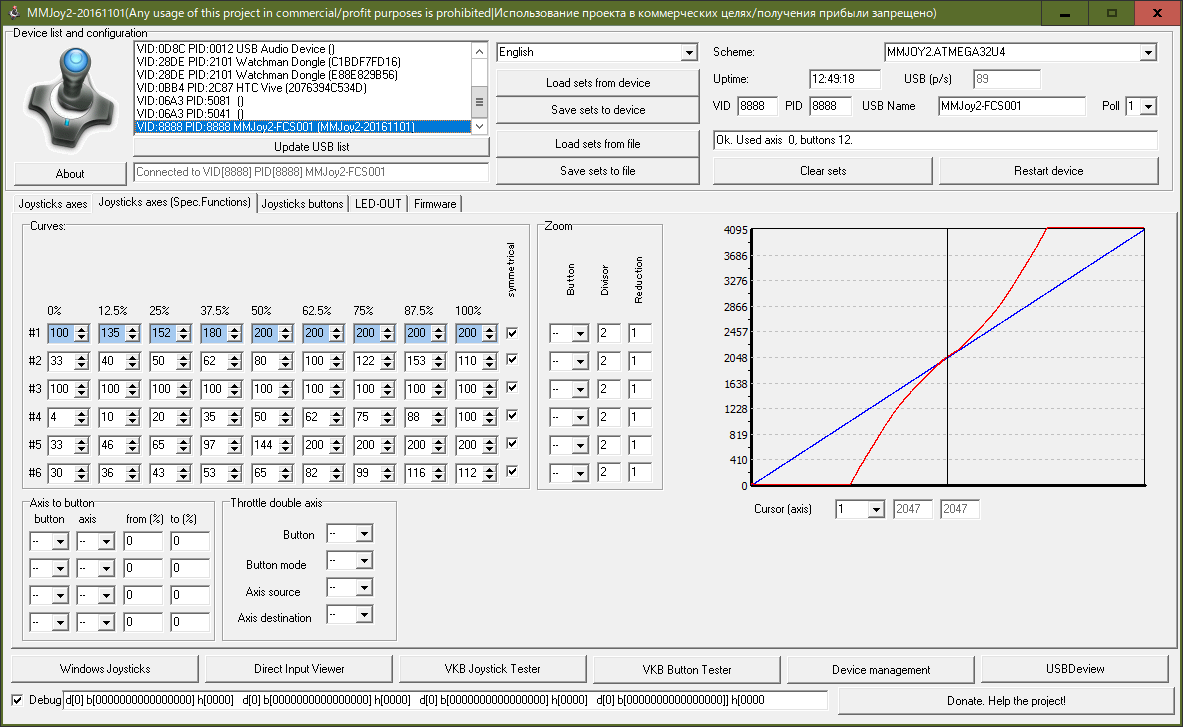 ++++++++++++++++++++
筐体は、CH-Productsのスロットルレバー
前にも書いたが、業務用も作っており、スイッチやスライダーの耐久性がかなり高い。
ボタンスイッチ1000万回、HATスイッチ200万回、レバー200万サイクル。という感じ。
ただ、耐久性の高いSWだが、タクトSWなので、感触はちょっとストロークが足りない感じ。
HATスイッチがメインで4っつもあり、これが、でかい手じゃないと、操作は結構キツイ。
モトのは、PS2キーボード、サウンドブラスター端子を使っている古い仕様。
これをUSBインターフェース用に改造する。
++++++++++++++++++++
筐体は、CH-Productsのスロットルレバー
前にも書いたが、業務用も作っており、スイッチやスライダーの耐久性がかなり高い。
ボタンスイッチ1000万回、HATスイッチ200万回、レバー200万サイクル。という感じ。
ただ、耐久性の高いSWだが、タクトSWなので、感触はちょっとストロークが足りない感じ。
HATスイッチがメインで4っつもあり、これが、でかい手じゃないと、操作は結構キツイ。
モトのは、PS2キーボード、サウンドブラスター端子を使っている古い仕様。
これをUSBインターフェース用に改造する。
 つかった28AWGのワイヤだけど、芯線が強く、ハンダのノリもわりと良い。被覆は耐熱性もアル。
芯線が強いと、ワイヤーストリップが神経質では無い。
カッターで軽い力でゆっくり被覆に切れ込みを入れ、ねじって引っ張る感じ。
細線を扱うのに頭が痛い問題をかなりクリアしてる。
唯一の難点は、ワイヤーとして、芯線も被覆も硬い感じのようで、取り回しや曲がりに癖を付けるのは難しいかも。
ピンヘッダーは、ハンズヘルパーを使う予定。ワイヤーの予備ハンダは済ませてある。
スライダーは動く部品なので、モトのケーブルかロボットケーブルの予定。
ボタンは、まだ4つ余裕があるので、増やすか迷ってはいるが、
ピンキーSWや、デカいマルチファンクションSWなど考えてはみてる感じ。
最近の車などのように、整備性を無視し、CADで書いた余裕の無い、ピンピンのハーネスみたいにならないよう、ケーブルはかなり余裕を持たせてあるつもり。<もたせすぎ。
軸のアサインを修正、ラダーをrZで、スロットルを反転。これで、古いゲームでもOKな感じ。
つかった28AWGのワイヤだけど、芯線が強く、ハンダのノリもわりと良い。被覆は耐熱性もアル。
芯線が強いと、ワイヤーストリップが神経質では無い。
カッターで軽い力でゆっくり被覆に切れ込みを入れ、ねじって引っ張る感じ。
細線を扱うのに頭が痛い問題をかなりクリアしてる。
唯一の難点は、ワイヤーとして、芯線も被覆も硬い感じのようで、取り回しや曲がりに癖を付けるのは難しいかも。
ピンヘッダーは、ハンズヘルパーを使う予定。ワイヤーの予備ハンダは済ませてある。
スライダーは動く部品なので、モトのケーブルかロボットケーブルの予定。
ボタンは、まだ4つ余裕があるので、増やすか迷ってはいるが、
ピンキーSWや、デカいマルチファンクションSWなど考えてはみてる感じ。
最近の車などのように、整備性を無視し、CADで書いた余裕の無い、ピンピンのハーネスみたいにならないよう、ケーブルはかなり余裕を持たせてあるつもり。<もたせすぎ。
軸のアサインを修正、ラダーをrZで、スロットルを反転。これで、古いゲームでもOKな感じ。
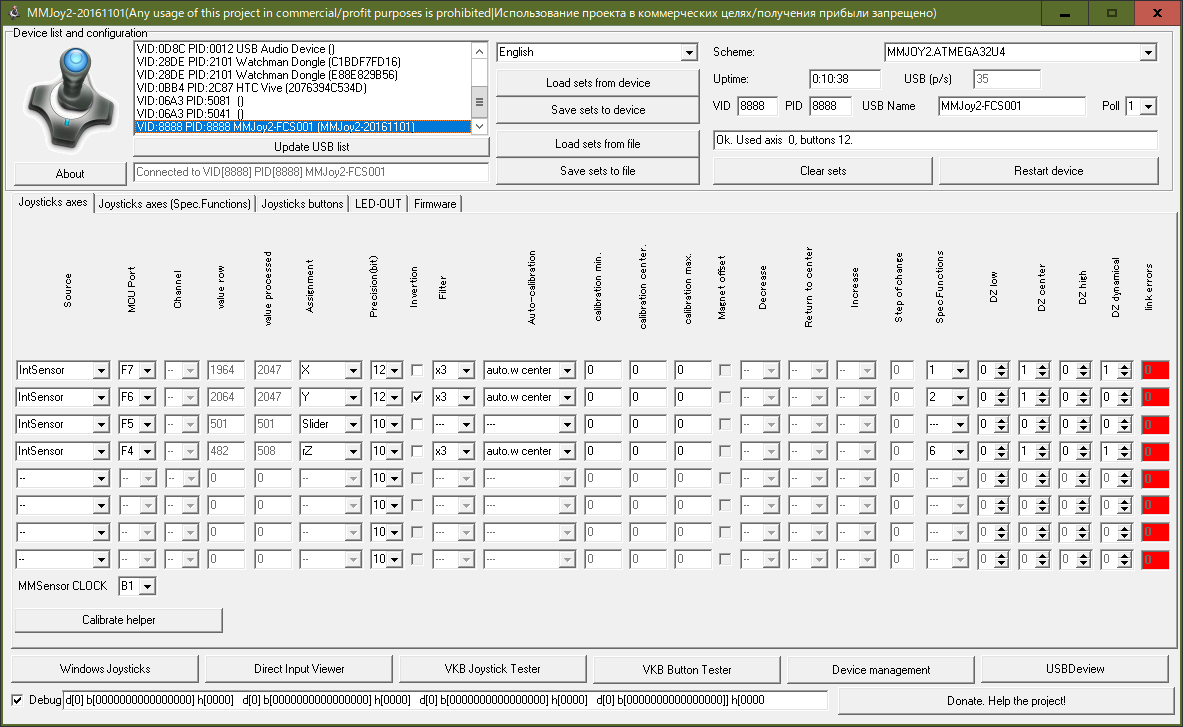 内部にボタン情報のシリアル化回路を実装。
内部にボタン情報のシリアル化回路を実装。
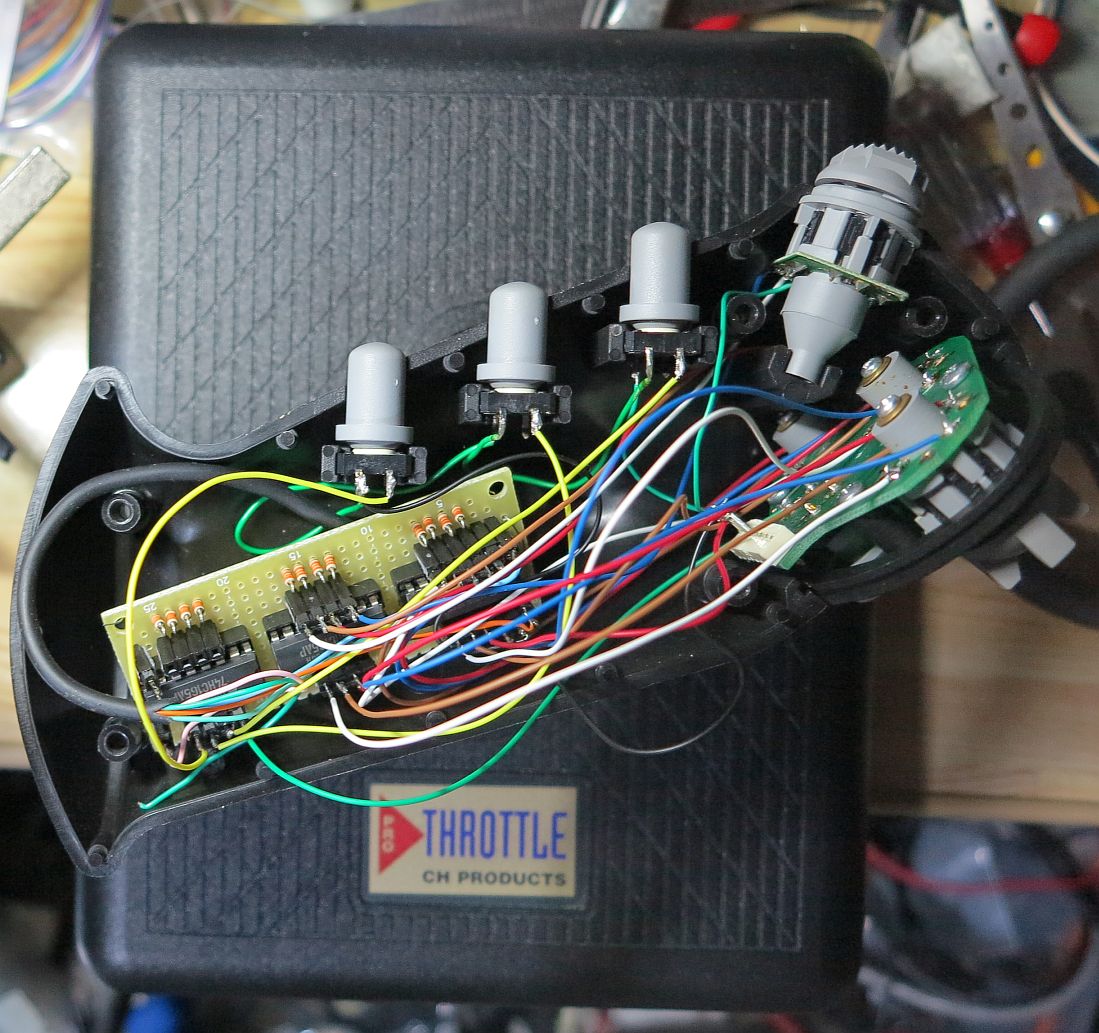 ハンズヘルパーはこれが良い。柔軟性は低いが、丈夫でアル。
他のは、固定具合が悪く、すぐにガタが来たりするのが殆ど。
ハンズヘルパーはこれが良い。柔軟性は低いが、丈夫でアル。
他のは、固定具合が悪く、すぐにガタが来たりするのが殆ど。
 プルアップ抵抗は、33KΩで、接点の電気的負担を少なく。
プルアップ抵抗は、33KΩで、接点の電気的負担を少なく。
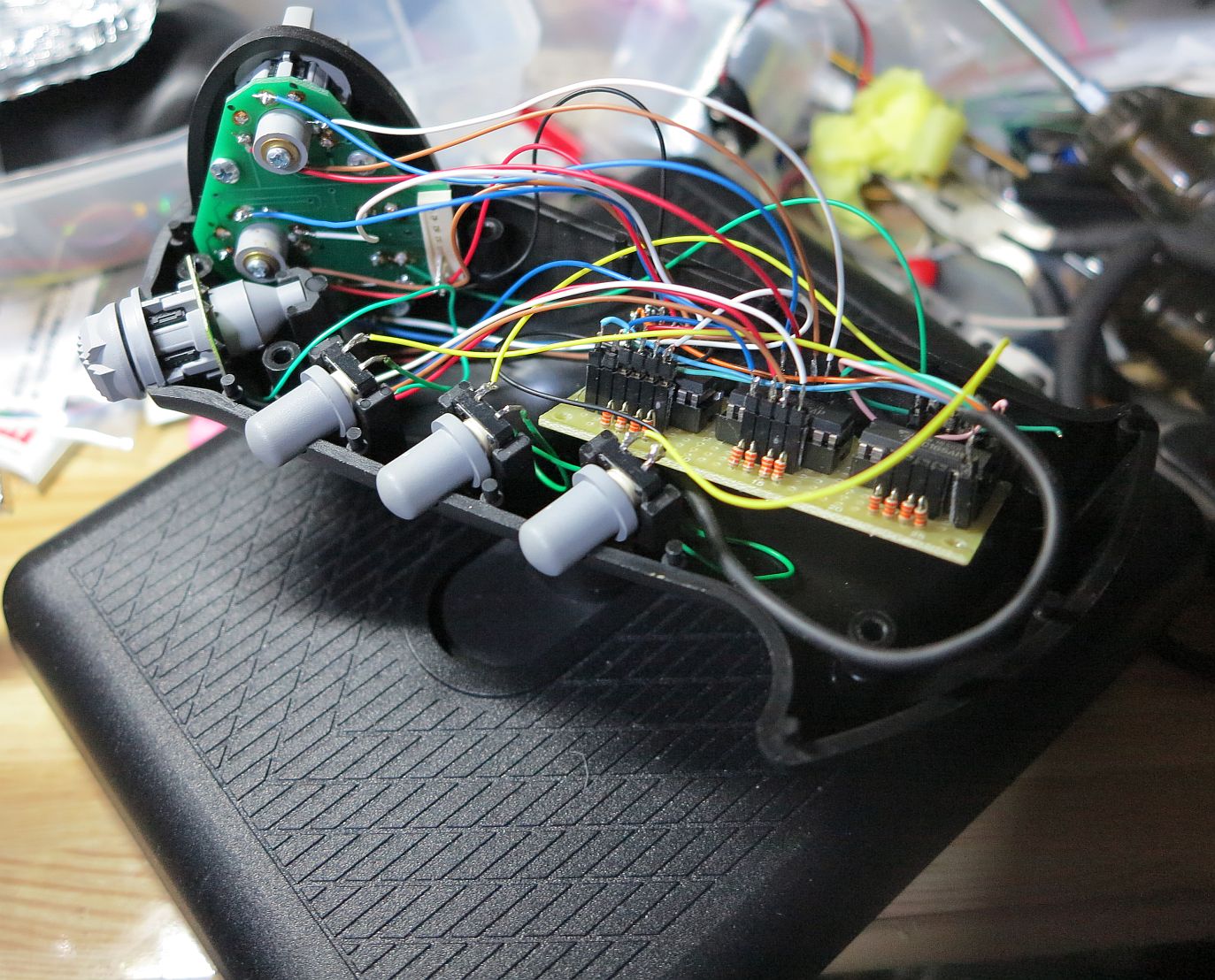 スライダーはマグネットを入れて、センターにラッチングするように改造してある。
受け側ABSにスライダ側に滑る素材が使われてるようなんだけれど、ちょっとごりっと感があったのでCRCのテフロン入りシリコーングリースを塗ったら解消。
スライダーはマグネットを入れて、センターにラッチングするように改造してある。
受け側ABSにスライダ側に滑る素材が使われてるようなんだけれど、ちょっとごりっと感があったのでCRCのテフロン入りシリコーングリースを塗ったら解消。
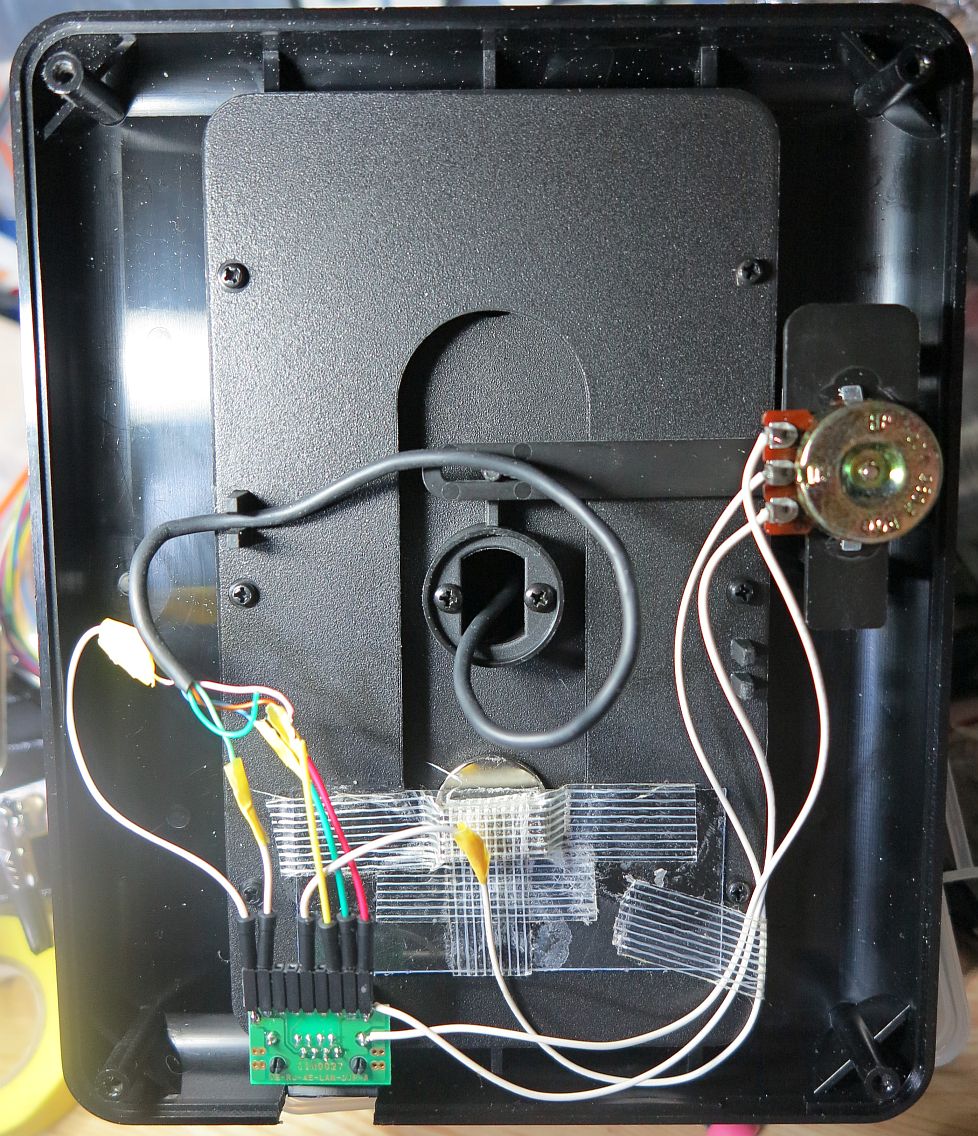 最初、動かないのでなんだと色々調べてみたら、ブレッドボード用のジャンパー線が一個不良品で導通が無かった。
狭角の可変抵抗は、90KΩ程度有る。50KΩ以上はノイズが懸念されると、フォーラムの最近の記事にもあったが、とりあえず、そのような問題は無かった。
あとは、I/Fとの入力インピーダンスとの兼ね合いかな。
マジックテープで固定。マジックテープは四方に分散させて取り付けるか、真ん中に付けて、四方をゴム足にするか、でフィットさせる。
最初、動かないのでなんだと色々調べてみたら、ブレッドボード用のジャンパー線が一個不良品で導通が無かった。
狭角の可変抵抗は、90KΩ程度有る。50KΩ以上はノイズが懸念されると、フォーラムの最近の記事にもあったが、とりあえず、そのような問題は無かった。
あとは、I/Fとの入力インピーダンスとの兼ね合いかな。
マジックテープで固定。マジックテープは四方に分散させて取り付けるか、真ん中に付けて、四方をゴム足にするか、でフィットさせる。
 スティックのI/Fを二つ使っているので、
MMJOY2のPIDが一致すると不味いみたいなので、
スティックが8888、レバーが8887に変更。
SerialNumberは両者「MMJoy2-20161101」になってる。
後で確認。
ベンダーID (VID):デバイスのメーカーに対して割り振られたID
プロダクトID (PID):メーカーにより製品に対して割り当てられたID
ということです。
今のところスコードロンのVRでは、2つのコントローラーを同時使用すると、飛行段階に入った途端にゲームが落ちる。
なので、通常画面でのプレイで試験してます。
でも、三日もしないで修正された。。
VRでも、おもったよりコントローラブルですね。
ProjectWingmanでもセンターラッチがゆるめなのでやりにくくなるかと思ってたのですが、逆でした。
ヨー軸の感度高めで、ロール低めが良いバランスが多い気がしました。
理由は、シューティングではヨー操作が必要なときにロールが混じると結構キツイですが、逆はそれほどでも無い気がする。
++++++++++++++++++++
おまけ>
DCSのフライトモデルが異常な件
今、一番リアルな挙動のフライトモノというと、恐らくXplane11なのだけど、
DCSのA-10が、Xplane11のF-4より曲がらないのはどうにかしてると思う。
これさえまともになれば、DCSのF-16Cが魅力的なのですが、、高いですが。
やっぱ、Falcon5.0がでればそれに超したたことはないのですが…、
F-4はデルタ翼的の一撃離脱機という感じで曲がらないし、
無理矢理曲げると反転してテールが前に向いてしまうと自衛隊のパイロットが言ってました。
F-16はベクタースラストやカナードで無理矢理ねじ曲げてないので、
旋回中のエネルギーロスが一番低い戦闘機で、空力学的には最も優れてます。
更に、音速を超えないとすると、矩形翼のA-10の旋回率はF-16を上回りそれゆえ、
模擬戦では、F-22やF-16の撃墜記録もあります。
F-15は8機でF-22が1機であっても模擬戦で何度やっても全滅させられたという。
まあ、F-15はエンジンパワーとレーダーに頼りすぎてる機体だからですね。
で、DCS、F-15の方がA-10よりかなり曲がります。
ここら辺、A-10の新型のDLCが最近出ましたから改善されてれば…、
されてたら、それはそれで、前と同じ機体がどうしてそんなに?というクレームが来そうw
って、前も書いた記憶が…、、
で、A-10Warthog2にアップグレード。したけど、変わらなかった。
まあ、実機より相当曲がらないのは、難しいですが、それで面白いかと言われれば…、、
++++++++++++++++++++
ゲーム用のスティックは、タクトスイッチがメインですが、
価格も考えて、内部配線が基板になってる事に起因する気がします。
スティックのI/Fを二つ使っているので、
MMJOY2のPIDが一致すると不味いみたいなので、
スティックが8888、レバーが8887に変更。
SerialNumberは両者「MMJoy2-20161101」になってる。
後で確認。
ベンダーID (VID):デバイスのメーカーに対して割り振られたID
プロダクトID (PID):メーカーにより製品に対して割り当てられたID
ということです。
今のところスコードロンのVRでは、2つのコントローラーを同時使用すると、飛行段階に入った途端にゲームが落ちる。
なので、通常画面でのプレイで試験してます。
でも、三日もしないで修正された。。
VRでも、おもったよりコントローラブルですね。
ProjectWingmanでもセンターラッチがゆるめなのでやりにくくなるかと思ってたのですが、逆でした。
ヨー軸の感度高めで、ロール低めが良いバランスが多い気がしました。
理由は、シューティングではヨー操作が必要なときにロールが混じると結構キツイですが、逆はそれほどでも無い気がする。
++++++++++++++++++++
おまけ>
DCSのフライトモデルが異常な件
今、一番リアルな挙動のフライトモノというと、恐らくXplane11なのだけど、
DCSのA-10が、Xplane11のF-4より曲がらないのはどうにかしてると思う。
これさえまともになれば、DCSのF-16Cが魅力的なのですが、、高いですが。
やっぱ、Falcon5.0がでればそれに超したたことはないのですが…、
F-4はデルタ翼的の一撃離脱機という感じで曲がらないし、
無理矢理曲げると反転してテールが前に向いてしまうと自衛隊のパイロットが言ってました。
F-16はベクタースラストやカナードで無理矢理ねじ曲げてないので、
旋回中のエネルギーロスが一番低い戦闘機で、空力学的には最も優れてます。
更に、音速を超えないとすると、矩形翼のA-10の旋回率はF-16を上回りそれゆえ、
模擬戦では、F-22やF-16の撃墜記録もあります。
F-15は8機でF-22が1機であっても模擬戦で何度やっても全滅させられたという。
まあ、F-15はエンジンパワーとレーダーに頼りすぎてる機体だからですね。
で、DCS、F-15の方がA-10よりかなり曲がります。
ここら辺、A-10の新型のDLCが最近出ましたから改善されてれば…、
されてたら、それはそれで、前と同じ機体がどうしてそんなに?というクレームが来そうw
って、前も書いた記憶が…、、
で、A-10Warthog2にアップグレード。したけど、変わらなかった。
まあ、実機より相当曲がらないのは、難しいですが、それで面白いかと言われれば…、、
++++++++++++++++++++
ゲーム用のスティックは、タクトスイッチがメインですが、
価格も考えて、内部配線が基板になってる事に起因する気がします。
 −−−−−−−−−−−−−−−−−−−−
今日、HP Reverb G2が出ますが、結構高性能でお得というイメージで、迷いますね。
Amazonでは数分で早速品切れ…、
初代Viveが出たとき、ボケの幅からこれは5倍くらい解像度が必要であると思いました。
で、最近、2倍くらいでこれ以上は必要ないとか言われてるけど、それはスクリーンドア効果が無くなったことであって、
やはりもっと必要ではないかと感じてました。
それは、4KモニタをViveと同じ視界で見た感じでも感じられます。
でもって、Canonから出たのがかなり高精細であったので、
可視限界を考慮してる、Holoレンズ2の仕様を見て見るに、1度あたり47ピクセルと言うことを考えると、
やっぱ、5倍という感じの印象です。
あと、視点入力が欲しいですね。演算の軽減にも繋がりそうですし。
で、2回払いから可能ということで、注文したのですが、決済画面で、6回と12回しか選択できなく。
カード会社的にも、6とか12はありえないので、一括払いの選択になりました。
思ったのですが、メッシュに見える幅が無ければ、低解像度でも、それほどスクリーンドア効果は感じないかも?
4月上旬の納期と来ました。
受付ナンバーから、56000番位かな?
既に生産してたのを考えると、一日500台の生産くらいかな〜??
++++++++++++++++++++
製品版でバランスの良いやつってのは
「Thrustmaster スラストマスター T-Flight Hotas X」かなーと感じてます。
が、
親指を置くとこにSWが欲しいですね。ピンキースイッチも。
++++++++++++++++++++
Falcon4.0のMOD
MODでBMSというもの
Realism Patchってのはどこ行ったのだろう。
とりあえず、BMSのフォーラムにユーザー登録して2GBほどのDATAをDL。
DX11な4Kとか、
二つ以上のコントローラーを使える。
別にの機種も飛ばせるらしい。リアリティーは判らないですが、
SteamのスクショにVR対応の画像が?って、やってた人もいる?VR化MODもあるといいのだけど。
マルチ画面で起動するとアイコンの整列が崩れるのがちょい難あり。
−−−−−−−−−−−−−−−−−−−−
今日、HP Reverb G2が出ますが、結構高性能でお得というイメージで、迷いますね。
Amazonでは数分で早速品切れ…、
初代Viveが出たとき、ボケの幅からこれは5倍くらい解像度が必要であると思いました。
で、最近、2倍くらいでこれ以上は必要ないとか言われてるけど、それはスクリーンドア効果が無くなったことであって、
やはりもっと必要ではないかと感じてました。
それは、4KモニタをViveと同じ視界で見た感じでも感じられます。
でもって、Canonから出たのがかなり高精細であったので、
可視限界を考慮してる、Holoレンズ2の仕様を見て見るに、1度あたり47ピクセルと言うことを考えると、
やっぱ、5倍という感じの印象です。
あと、視点入力が欲しいですね。演算の軽減にも繋がりそうですし。
で、2回払いから可能ということで、注文したのですが、決済画面で、6回と12回しか選択できなく。
カード会社的にも、6とか12はありえないので、一括払いの選択になりました。
思ったのですが、メッシュに見える幅が無ければ、低解像度でも、それほどスクリーンドア効果は感じないかも?
4月上旬の納期と来ました。
受付ナンバーから、56000番位かな?
既に生産してたのを考えると、一日500台の生産くらいかな〜??
++++++++++++++++++++
製品版でバランスの良いやつってのは
「Thrustmaster スラストマスター T-Flight Hotas X」かなーと感じてます。
が、
親指を置くとこにSWが欲しいですね。ピンキースイッチも。
++++++++++++++++++++
Falcon4.0のMOD
MODでBMSというもの
Realism Patchってのはどこ行ったのだろう。
とりあえず、BMSのフォーラムにユーザー登録して2GBほどのDATAをDL。
DX11な4Kとか、
二つ以上のコントローラーを使える。
別にの機種も飛ばせるらしい。リアリティーは判らないですが、
SteamのスクショにVR対応の画像が?って、やってた人もいる?VR化MODもあるといいのだけど。
マルチ画面で起動するとアイコンの整列が崩れるのがちょい難あり。
 場所を忘れてしまったけど。
Falcon4-BMS-Training-JP_v1.0.pdf
を見つけるか。対地ミッションまでしか描いてない感じですが、
或いは、DCSも参考に。
https://ux.getuploader.com/DCSJP1/index/date/desc/1
モトの製品のマニュアルはモノクロで分厚いのですが、
スキャンしてデジタルDATA化したいです。
場所を忘れてしまったけど。
Falcon4-BMS-Training-JP_v1.0.pdf
を見つけるか。対地ミッションまでしか描いてない感じですが、
或いは、DCSも参考に。
https://ux.getuploader.com/DCSJP1/index/date/desc/1
モトの製品のマニュアルはモノクロで分厚いのですが、
スキャンしてデジタルDATA化したいです。
 現在、スイッチ1とボタン1が違い、どうにも出来ない。
二つ目のユニットの方のボタンを優先するので、ガンファイヤーやウェッポンドロップボタンがスロットルに割り振られてしまう。
PIDの順序で変わるかも。ユニット名も化けている。
++++++++++++++++++++
感圧式ペダルは、ペダルからイスの高さや、膝との角度で、かなり感覚が違って来るですね。
またソレヘの操作感覚の慣れも必要な感じでして…、
ジェット戦闘機は、スロットル回転数60〜70がアイドリングが多いようで、
なので、スライダーの中立は若干ソレを踏まえている。
++++++++++++++++++++
++++++++++++++++++++
MMJOY2で使う互換ボード-:??
扱うArduino互換ボードは、
Leonardo Pro Micro ATmega32U4 5V 16MHz USB端子あり。
リード線を半田付けでも良いのですが、一応ピンヘッダ付きが良いかと思います。あとは、ちっちゃいブレッドボードと、ジャンパー線。ケースとなるもの(ポリカボの箱を使ってます)。
特に、5VとUSB端子アリの項目には注意。(3.3V、USB端子無しもある。)
ProMicroには、
「ボードに安定化されていない電源を供給している場合は、VCCではなく必ず "RAW"ピンに接続してください。」
とある。
推奨されるのは6〜7Vで最大9Vまで耐えられるらしいです。
外部電源の意味のようですね。レギュレタICが入ってるようです。
Leonardoというと、大きいボードのタイプもありますが、こちらは、扱いによっては、トータルとして安いかも?
もしかしたら要電源アダプタだったかも?(多分独立してマイコンを動かすときのみ) こちらは三端子レギュレタを確認。 推奨7〜12V
Arduino互換ボードの仕様として
小型がADCx4ポート、大きいボードがADCx12ポートとあるけど、MMJOY2では8つが最大で、小さい方も再設定で端子を8っつに出来るかも??と思います。
(上の方の図で「A1〜A4」とか「AI」と有るのは、AnalogInだと思いますので。AEはAnalogExで外部接続MCP3208などアナログ端子に使えるらしい。)
小さい方でADCに使えると思われるのは、B4、B5、B6、D4、D7、F4、F5、F6、F7、、、あと3つ有るかも。
「Leonardo Arduino用 ATmega328と互換」と有りますが、328は、Arduino用のスケッチ(プログラム)をコンパイルして入れて使うにはそうなのかもですが、MMJOY2のFWは対応してないようです。FWは根っこが変わるわけですから。
ショップによって、違う仕様の商品が届いたり、不良品だったり、検品の度合いがかなり違うようです。(Amazonではレビューなどを見て、安かれ悪かれにならないように。。)
USB端子の書き込み用のCOMポートは、通常時のCOMポートと番号が違うので注意。起動(リセット)後8秒で消える。<デバイスマネージャーで見て設定する。
あとは、USB端子がmicroBなこともあり、負担をかけないように。
++++++++++++++++++++
ネジ止め剤-:??
ジョイスティック類は、反復してストレスがかかるので、ネジが緩みやすい。
で、ネジ止め剤。
ネジの径が大きいと、強めの強度を要求したりする。
現在、スイッチ1とボタン1が違い、どうにも出来ない。
二つ目のユニットの方のボタンを優先するので、ガンファイヤーやウェッポンドロップボタンがスロットルに割り振られてしまう。
PIDの順序で変わるかも。ユニット名も化けている。
++++++++++++++++++++
感圧式ペダルは、ペダルからイスの高さや、膝との角度で、かなり感覚が違って来るですね。
またソレヘの操作感覚の慣れも必要な感じでして…、
ジェット戦闘機は、スロットル回転数60〜70がアイドリングが多いようで、
なので、スライダーの中立は若干ソレを踏まえている。
++++++++++++++++++++
++++++++++++++++++++
MMJOY2で使う互換ボード-:??
扱うArduino互換ボードは、
Leonardo Pro Micro ATmega32U4 5V 16MHz USB端子あり。
リード線を半田付けでも良いのですが、一応ピンヘッダ付きが良いかと思います。あとは、ちっちゃいブレッドボードと、ジャンパー線。ケースとなるもの(ポリカボの箱を使ってます)。
特に、5VとUSB端子アリの項目には注意。(3.3V、USB端子無しもある。)
ProMicroには、
「ボードに安定化されていない電源を供給している場合は、VCCではなく必ず "RAW"ピンに接続してください。」
とある。
推奨されるのは6〜7Vで最大9Vまで耐えられるらしいです。
外部電源の意味のようですね。レギュレタICが入ってるようです。
Leonardoというと、大きいボードのタイプもありますが、こちらは、扱いによっては、トータルとして安いかも?
もしかしたら要電源アダプタだったかも?(多分独立してマイコンを動かすときのみ) こちらは三端子レギュレタを確認。 推奨7〜12V
Arduino互換ボードの仕様として
小型がADCx4ポート、大きいボードがADCx12ポートとあるけど、MMJOY2では8つが最大で、小さい方も再設定で端子を8っつに出来るかも??と思います。
(上の方の図で「A1〜A4」とか「AI」と有るのは、AnalogInだと思いますので。AEはAnalogExで外部接続MCP3208などアナログ端子に使えるらしい。)
小さい方でADCに使えると思われるのは、B4、B5、B6、D4、D7、F4、F5、F6、F7、、、あと3つ有るかも。
「Leonardo Arduino用 ATmega328と互換」と有りますが、328は、Arduino用のスケッチ(プログラム)をコンパイルして入れて使うにはそうなのかもですが、MMJOY2のFWは対応してないようです。FWは根っこが変わるわけですから。
ショップによって、違う仕様の商品が届いたり、不良品だったり、検品の度合いがかなり違うようです。(Amazonではレビューなどを見て、安かれ悪かれにならないように。。)
USB端子の書き込み用のCOMポートは、通常時のCOMポートと番号が違うので注意。起動(リセット)後8秒で消える。<デバイスマネージャーで見て設定する。
あとは、USB端子がmicroBなこともあり、負担をかけないように。
++++++++++++++++++++
ネジ止め剤-:??
ジョイスティック類は、反復してストレスがかかるので、ネジが緩みやすい。
で、ネジ止め剤。
ネジの径が大きいと、強めの強度を要求したりする。
 222:嫌気性では一番弱いよって、外すのもラク。緩まないのならコレが良い。
243:嫌気性の高強度でしっかり固定したいとき。
290:中〜高強度の後浸透タイプで、ネジを締めた後から浸透させてやる嫌気性。ネジの軸はキツく締めても、締め付いてる反対の片側の面は隙間があるので比較的浸透する。シャバシャバの驚くべき低粘度です。
ネジの頭方からも塗布で使用できるか不明だけれど、そういう画像も少しあった。低強度だと220というのもある。
アクチベーターという硬化促進剤もあるけど。。
小ねじにはタミヤのジェルタイプの嫌気性を使ったりも。
ThreeBondのは、溶剤系で揮発性です。嫌気性のように一部のプラ樹脂を痛めません。強度は222よりももっと弱いですが、簡単に外せるのは、ある意味、利点とも言えるかなーと。硬化時間は24時間。
++++++++++++++++++++
++++++++++++++++++++
210212
DCSのF-16Cをセール購入。30%引きで6125円…、高いけど。
1GBなのにDLもやたら時間がかかってます。鯖へのアクセス集中かな?
DCSというと、やけに何故か曲がらないフライトモデルが多いけど、
ちゃんと実際のデータ通り曲がる機体になってれば良いけど。
DCS社員がF-16の機密DATA持ち出しで逮捕されたので有名ですね。
1GBのデータDLに1時間を食いました。セールで鯖が混んでいたのかも。
DCSのF-16C、旋回率はちょっと低い気がするけど、それなりなのかも知れない。
けど、
旋回中の速度ロスがちょっと強いような気がする。
どんどん速度が落ちる故にまともに180°旋回もキツイ。
他の機体のように無駄に機体が暴れないのはかなり良い感じ。ある程度、Falcon4.0が下地に?
A-10の修正が欲しいトコです。
追記>
グラフと照らし合わせて、コーナー速度でのターンをしてみたところ、
旋回率は妥当なようです。
Falcon4.0も旋回は同じくらいですが、
やはりDCSは旋回中の減速がやや強いと思います。
旋回中は、エネルギロスがあります。
主に迎え角が高いことに起因しますが、F-16は、戦闘機の中で一番旋回でのエネルギロスが少ない機体です。
コーナー速度上限430ノットで水平4〜5G旋回中、フルスロットルにしても、180°回ると、200ノット台になると思います。
これでは、Falcon4.0の教本の360°水平旋回は不可能に近いです。
アフターバーナーを入れると何とかイケるようです。
A-10は、あまりAoAを大きくしすぎると、逆に曲がらなくって、不安定になる印象を受けました。
実写映像のようにヒラリヒラリとはなかなか行かないですね。
A-10のコーナー速度は知らないですが、
200ノットちょい程度の低速での旋回性および俊敏性が高いと思われます。
戦闘機ではまねの出来ない旋回性という感じで。
アタッカーとして、
低空で、降下して、掃射し、一気に機首を持ち上げる必要があるからです。
これが、不安定なのは、危険な乗り物な感じですね。
210214
一番評判が良い地上データ、「Persian Gulf Map」を購入。2928円。
まあ、見た感じは、それなりかなーという感じですが、砂漠とか雪山とか変化に富んでるのかな?
キャンペーンのDLCは機体だけで無く、地上データのDLCも必要というのが…ですね。
210215
DCSのF/A-18Cを購入してしまった。
F-16Cと同じ30%引きで6125円でした…。
レビューでは、F-16Cの方が曲がるという意見が多かったけど、逆のような気もする。
しかし、F-16Cよりロールレートが遅い。双発故の慣性モーメント影響かな?
視界はF-16Cの方が良い。
総じて、まあ、操縦した感じは、似ていて、機体が暴れない。よく曲がる。
計器の扱いが大分違うので設定が大変そう。。。
−−−−−−−−−−−−−−−−−−−−
そういえば、DCSは、知らない間に2になってますね。
コレ知らないで安定版のβを有効にしてないと、新しい機体がインスコ出来ないというコトらしいです…、、
画質が売りのMSFSが出たので、
品質上げたり、安くしたりの対処が欲しいですね。
VRでフライトシムが復権してくると良いですよね。
昔のフライトシムは、結構実戦パイロットが監修したモノが多かったのだけれど、
DCSは、計器操作はそのまんまかもだけれど、そこのとこがどうなってるのか不明。
さじ加減は、やっぱ、操縦した人に決めて貰わないと、戦術にも差が出るし、優劣の順位やその機体の趣向も変わってしまうと思うので。
DCSの場合、作ってるチームがそれぞれの機体で違うのが、バランスに影響してるのかも??
飛行機として旋回率や敏捷性が気になるトコですが、
実際は、強力なレーダーや射程の長いミサイルで、見える前に勝負が付いて、
ドッグファイトというのあまりないような…。
レーダーモニタの見方や、それらの素早い操作がキモかな?
最近はステルスで更に〜
先進のコンバットフライトシミュレーターが殆ど出てこないのは、
やっぱステルスが関係あるのかな?
どういう戦闘になるかとか、機体ごとのバランスとか考えると、ワカメですし。
一世代前相手に、俺様TSUEE関連にはなりそうかも?
A-10は、エンジンが非力なので、250〜300ノットで旋回を始めても、3.5G旋回でも、結構すぐに失速すると言うことなのかな。ホントかな??
++++++++++++++++++++
++++++++++++++++++++
ジョイスティックが原因で、PCの画面の電源が休まない。-:??
「ジョイスティックが原因で、PCの画面の電源が休まない。」
ジョイスティックのステータスモニターを起動してからこのようなことが起こった感じがしてます。
ググって
cmdで
powercfg /requests
すると、図のような感じ。
222:嫌気性では一番弱いよって、外すのもラク。緩まないのならコレが良い。
243:嫌気性の高強度でしっかり固定したいとき。
290:中〜高強度の後浸透タイプで、ネジを締めた後から浸透させてやる嫌気性。ネジの軸はキツく締めても、締め付いてる反対の片側の面は隙間があるので比較的浸透する。シャバシャバの驚くべき低粘度です。
ネジの頭方からも塗布で使用できるか不明だけれど、そういう画像も少しあった。低強度だと220というのもある。
アクチベーターという硬化促進剤もあるけど。。
小ねじにはタミヤのジェルタイプの嫌気性を使ったりも。
ThreeBondのは、溶剤系で揮発性です。嫌気性のように一部のプラ樹脂を痛めません。強度は222よりももっと弱いですが、簡単に外せるのは、ある意味、利点とも言えるかなーと。硬化時間は24時間。
++++++++++++++++++++
++++++++++++++++++++
210212
DCSのF-16Cをセール購入。30%引きで6125円…、高いけど。
1GBなのにDLもやたら時間がかかってます。鯖へのアクセス集中かな?
DCSというと、やけに何故か曲がらないフライトモデルが多いけど、
ちゃんと実際のデータ通り曲がる機体になってれば良いけど。
DCS社員がF-16の機密DATA持ち出しで逮捕されたので有名ですね。
1GBのデータDLに1時間を食いました。セールで鯖が混んでいたのかも。
DCSのF-16C、旋回率はちょっと低い気がするけど、それなりなのかも知れない。
けど、
旋回中の速度ロスがちょっと強いような気がする。
どんどん速度が落ちる故にまともに180°旋回もキツイ。
他の機体のように無駄に機体が暴れないのはかなり良い感じ。ある程度、Falcon4.0が下地に?
A-10の修正が欲しいトコです。
追記>
グラフと照らし合わせて、コーナー速度でのターンをしてみたところ、
旋回率は妥当なようです。
Falcon4.0も旋回は同じくらいですが、
やはりDCSは旋回中の減速がやや強いと思います。
旋回中は、エネルギロスがあります。
主に迎え角が高いことに起因しますが、F-16は、戦闘機の中で一番旋回でのエネルギロスが少ない機体です。
コーナー速度上限430ノットで水平4〜5G旋回中、フルスロットルにしても、180°回ると、200ノット台になると思います。
これでは、Falcon4.0の教本の360°水平旋回は不可能に近いです。
アフターバーナーを入れると何とかイケるようです。
A-10は、あまりAoAを大きくしすぎると、逆に曲がらなくって、不安定になる印象を受けました。
実写映像のようにヒラリヒラリとはなかなか行かないですね。
A-10のコーナー速度は知らないですが、
200ノットちょい程度の低速での旋回性および俊敏性が高いと思われます。
戦闘機ではまねの出来ない旋回性という感じで。
アタッカーとして、
低空で、降下して、掃射し、一気に機首を持ち上げる必要があるからです。
これが、不安定なのは、危険な乗り物な感じですね。
210214
一番評判が良い地上データ、「Persian Gulf Map」を購入。2928円。
まあ、見た感じは、それなりかなーという感じですが、砂漠とか雪山とか変化に富んでるのかな?
キャンペーンのDLCは機体だけで無く、地上データのDLCも必要というのが…ですね。
210215
DCSのF/A-18Cを購入してしまった。
F-16Cと同じ30%引きで6125円でした…。
レビューでは、F-16Cの方が曲がるという意見が多かったけど、逆のような気もする。
しかし、F-16Cよりロールレートが遅い。双発故の慣性モーメント影響かな?
視界はF-16Cの方が良い。
総じて、まあ、操縦した感じは、似ていて、機体が暴れない。よく曲がる。
計器の扱いが大分違うので設定が大変そう。。。
−−−−−−−−−−−−−−−−−−−−
そういえば、DCSは、知らない間に2になってますね。
コレ知らないで安定版のβを有効にしてないと、新しい機体がインスコ出来ないというコトらしいです…、、
画質が売りのMSFSが出たので、
品質上げたり、安くしたりの対処が欲しいですね。
VRでフライトシムが復権してくると良いですよね。
昔のフライトシムは、結構実戦パイロットが監修したモノが多かったのだけれど、
DCSは、計器操作はそのまんまかもだけれど、そこのとこがどうなってるのか不明。
さじ加減は、やっぱ、操縦した人に決めて貰わないと、戦術にも差が出るし、優劣の順位やその機体の趣向も変わってしまうと思うので。
DCSの場合、作ってるチームがそれぞれの機体で違うのが、バランスに影響してるのかも??
飛行機として旋回率や敏捷性が気になるトコですが、
実際は、強力なレーダーや射程の長いミサイルで、見える前に勝負が付いて、
ドッグファイトというのあまりないような…。
レーダーモニタの見方や、それらの素早い操作がキモかな?
最近はステルスで更に〜
先進のコンバットフライトシミュレーターが殆ど出てこないのは、
やっぱステルスが関係あるのかな?
どういう戦闘になるかとか、機体ごとのバランスとか考えると、ワカメですし。
一世代前相手に、俺様TSUEE関連にはなりそうかも?
A-10は、エンジンが非力なので、250〜300ノットで旋回を始めても、3.5G旋回でも、結構すぐに失速すると言うことなのかな。ホントかな??
++++++++++++++++++++
++++++++++++++++++++
ジョイスティックが原因で、PCの画面の電源が休まない。-:??
「ジョイスティックが原因で、PCの画面の電源が休まない。」
ジョイスティックのステータスモニターを起動してからこのようなことが起こった感じがしてます。
ググって
cmdで
powercfg /requests
すると、図のような感じ。
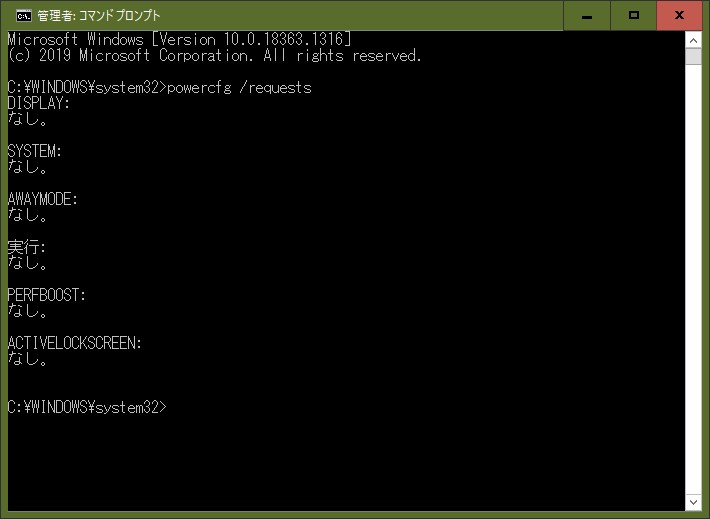 次に、
高速スタートアップ機能を無効
Winの設定画面に出てこないので、Regeditで編集。
コンピューター\HKEY_LOCAL_MACHINE\SYSTEM\CurrentControlSet\Control\Session Manager\Power
HiberbootEnabled値を0に
でも、変化無し。
で、やっぱ、ゲームの入力系のデバイスによって起こることもあるらしい。
でも、外すのはモノすっごく面倒なこと。。。
モニター2つで100W位食ってるので。
なんとか強制的にできないモノかなー…、
−−−−−−−−
これだとすると、やっぱめんどくさい。。
https://anyalog.hatenablog.com/entry/2019/03/29/152537
devcon.exeというモノを入手する。
PC内部に既にあったが、新しいのをDLしてみた。
コントローラーの
ベンダーID (VID):デバイスのメーカーに対して割り振られたID
プロダクトID (PID):メーカーにより製品に対して割り当てられたID
後のは,,Revがあり、ソレに加えてその後ろに認識させた順番が入るが、これは要らない。
次に、
高速スタートアップ機能を無効
Winの設定画面に出てこないので、Regeditで編集。
コンピューター\HKEY_LOCAL_MACHINE\SYSTEM\CurrentControlSet\Control\Session Manager\Power
HiberbootEnabled値を0に
でも、変化無し。
で、やっぱ、ゲームの入力系のデバイスによって起こることもあるらしい。
でも、外すのはモノすっごく面倒なこと。。。
モニター2つで100W位食ってるので。
なんとか強制的にできないモノかなー…、
−−−−−−−−
これだとすると、やっぱめんどくさい。。
https://anyalog.hatenablog.com/entry/2019/03/29/152537
devcon.exeというモノを入手する。
PC内部に既にあったが、新しいのをDLしてみた。
コントローラーの
ベンダーID (VID):デバイスのメーカーに対して割り振られたID
プロダクトID (PID):メーカーにより製品に対して割り当てられたID
後のは,,Revがあり、ソレに加えてその後ろに認識させた順番が入るが、これは要らない。
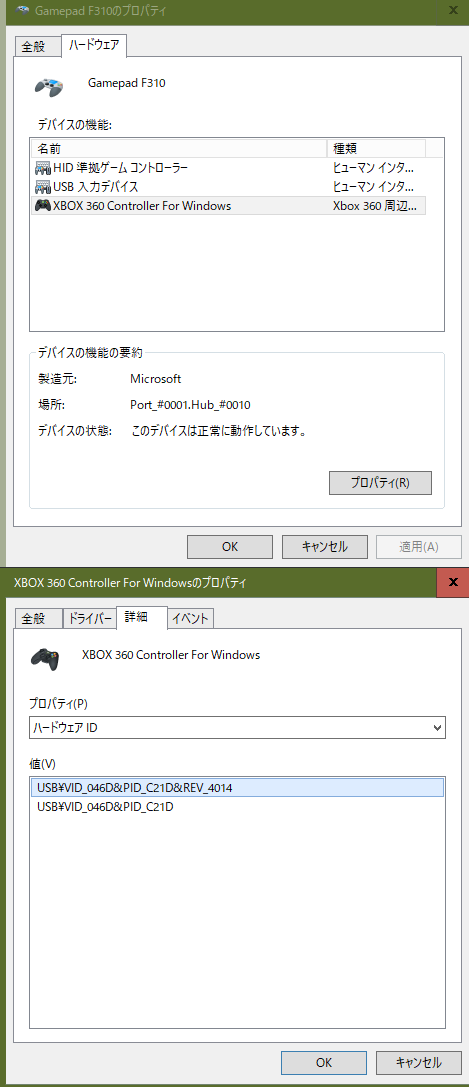
 一番最初のは、Xインプットだからか、消えなかったが、問題は無かった。
−−−−−−−−
一応、3っつあるゲームデバイスを全て抜けば、有効化することを確認。
けど、
ジョイスティックの自動キャリブレーションを設定してるため、
再度キャリブレーションが必要になる。
じゃないと、センターと設定カーブに対する比例係数が狂いかねない。
非常に面倒なことである。
これはMS側の放置してる不備で良からぬ感じである。
−−−−−−−−−−−−−−−−−−−−
一応、Disableにして、Enableにしてみたけど、
再度キャリブレーションを行うことは無かったようである。
あと、アプリが使ってる途中だと、Disableにならないことがあるようだ。
どうしてもenebleに戻らないときは、デバイスとプリンターのプロパティーで有効化。
結局、
めんどくさいので、スイッチ付きのUSBハブにした。
実際にはUSBスイッチにUSBハブを付ければ一括で。
気にすべき所は、
この手のSWは、データラインが生きてて、電源ラインのみを入り切りスルだけのモノも有る。
そうすると、外部電源を用いた回路であると、コントローラーは切断されないことがある。
++++++++++++++++++++
スティックに使えるSW等。-:??
スティックに使えるSW等
標準型のプッシュSWは置いといて、、、
一番最初のは、Xインプットだからか、消えなかったが、問題は無かった。
−−−−−−−−
一応、3っつあるゲームデバイスを全て抜けば、有効化することを確認。
けど、
ジョイスティックの自動キャリブレーションを設定してるため、
再度キャリブレーションが必要になる。
じゃないと、センターと設定カーブに対する比例係数が狂いかねない。
非常に面倒なことである。
これはMS側の放置してる不備で良からぬ感じである。
−−−−−−−−−−−−−−−−−−−−
一応、Disableにして、Enableにしてみたけど、
再度キャリブレーションを行うことは無かったようである。
あと、アプリが使ってる途中だと、Disableにならないことがあるようだ。
どうしてもenebleに戻らないときは、デバイスとプリンターのプロパティーで有効化。
結局、
めんどくさいので、スイッチ付きのUSBハブにした。
実際にはUSBスイッチにUSBハブを付ければ一括で。
気にすべき所は、
この手のSWは、データラインが生きてて、電源ラインのみを入り切りスルだけのモノも有る。
そうすると、外部電源を用いた回路であると、コントローラーは切断されないことがある。
++++++++++++++++++++
スティックに使えるSW等。-:??
スティックに使えるSW等
標準型のプッシュSWは置いといて、、、
 左の赤のデカいのは案外安い。
黄色い軸のトグルSWは、中点リターンでセレクタなどに良い感じ。ちょっと高い。
左の赤のデカいのは案外安い。
黄色い軸のトグルSWは、中点リターンでセレクタなどに良い感じ。ちょっと高い。
 ジョイスティックメーカーの一部では、
カーボン入りのスライド接点用のグリスを使ってた感じなので、そんなのも欲しいとこ。。
---------------------------------------------------------
No.001 ALPS スライドボリューム60mm B10KΩ RS6011Y-OC10-CO-PO-B103
※単価 152円
---------------------------------------------------------
No.002 ミヤマ プッシュスイッチ (モーメンタリ2P・赤) MS-402-R(赤)
※単価 90円
---------------------------------------------------------
No.003 オムロン 極超小型基本スイッチ 一般形 【ピン・ボタン形/基板用端子ストレート形】 D2F-01
※単価 158円
---------------------------------------------------------
No.004 Kailh Electronics Kailh Pro Light Green Switch -Clicky CPG151101D223
※単価 50円
---------------------------------------------------------
001:ChProductsのProスロットルと同じ60mmの寸法なので。軸が樹脂なコトに注意。
002:穴加工が小さく、加工がラク。
003:マウスのSWとしてよく使われてる。耐久性は10万回。
004:キーボードのSWで横に接点を押す感じ。耐久性は7000万回でそれ以上は無いかと、50円と安い。ただし電流は最大10mA、取り付けや見てくれに加工が必要。
マウスのスイッチ接点は+に帯電することによって、酸化しやすくなる。
逆に、−に帯電してやればチタンのように閉殻となり錆びない。
摩擦から放電出来る構造にしてれば、チャタリングも少なくなると思われる。
鉄の部品にステンレスネジを使えば鉄が錆びやすくなり、アルミを使えば錆びにくくなるので、
ネジには注意みたいなのと同じ。
横に押すと言えば、ガラス封入のリードスイッチにマグネットを近づける形のスイッチもあった。たしか業務用ゲーム機器用。
わすれてた。
これは、多少の加工が必要だけど、安くてラッチ感もある。
35円でオルタネートタイプも。
ジョイスティックメーカーの一部では、
カーボン入りのスライド接点用のグリスを使ってた感じなので、そんなのも欲しいとこ。。
---------------------------------------------------------
No.001 ALPS スライドボリューム60mm B10KΩ RS6011Y-OC10-CO-PO-B103
※単価 152円
---------------------------------------------------------
No.002 ミヤマ プッシュスイッチ (モーメンタリ2P・赤) MS-402-R(赤)
※単価 90円
---------------------------------------------------------
No.003 オムロン 極超小型基本スイッチ 一般形 【ピン・ボタン形/基板用端子ストレート形】 D2F-01
※単価 158円
---------------------------------------------------------
No.004 Kailh Electronics Kailh Pro Light Green Switch -Clicky CPG151101D223
※単価 50円
---------------------------------------------------------
001:ChProductsのProスロットルと同じ60mmの寸法なので。軸が樹脂なコトに注意。
002:穴加工が小さく、加工がラク。
003:マウスのSWとしてよく使われてる。耐久性は10万回。
004:キーボードのSWで横に接点を押す感じ。耐久性は7000万回でそれ以上は無いかと、50円と安い。ただし電流は最大10mA、取り付けや見てくれに加工が必要。
マウスのスイッチ接点は+に帯電することによって、酸化しやすくなる。
逆に、−に帯電してやればチタンのように閉殻となり錆びない。
摩擦から放電出来る構造にしてれば、チャタリングも少なくなると思われる。
鉄の部品にステンレスネジを使えば鉄が錆びやすくなり、アルミを使えば錆びにくくなるので、
ネジには注意みたいなのと同じ。
横に押すと言えば、ガラス封入のリードスイッチにマグネットを近づける形のスイッチもあった。たしか業務用ゲーム機器用。
わすれてた。
これは、多少の加工が必要だけど、安くてラッチ感もある。
35円でオルタネートタイプも。
 −−−−−−−−−−−−−−−−−−−−
210221
スロットルを24ボタンに増やしました。
−−−−−−−−−−−−−−−−−−−−
210221
スロットルを24ボタンに増やしました。
 スイッチの位置は、ベストかというと、隙間に入れてる感じでかなりキツキツだったので、この選択肢しかなかった感じ。でも、まあ、妥当な位置かな?
ホントは、トグルSWなども付けたかったのですが、内部構造的に、付ける隙間的な余裕が殆ど無いのでムリでした。
スイッチは、
・人差し指の左右に来るスイッチ、人差し指でHATを扱うとき、丁度この二つをまたぐ配置。案外妥当な位置。
・その上のスイッチ<緊急性の無いアフターバーナー有効化に固定。
・ピンキースイッチ:まあ、いつもあるような小指で操作するスイッチ。
それにしても、F-16CとF/A-18Cの計器の扱い方はかなり違う感じです。
あと、
DCSでも、機種依存なのが、
レーダーアンテナ上下とか、スピードブレーキかな?
フラップや車輪はだいたい250ノット以上だと使えないようなので、
HOTASに入れる必要は無さそう、
ARMスイッチも雰囲気的には、パネルにあると盛り上がりそうですね。
スピードブレーキは反応が鈍いしエネルギーを失うので、戦闘時はマズ使わないし、
チャフ、フレア同時放出は,緊急事態時なので、F/A-18CではHOTASに入ってないでサイドをウオールですね。
ここは、F-16Cと違うとこ。
++++++++++++++++++++
DCSでF-16CのA-AなSweepを簡易ミッションで練習プレイしてるけど、
F-16Cでは、
HAT-SWのカーソルで、レーダーモニタ上の敵を捕捉、ロックする必要がある。
ロールしたりすると、すぐロックが外れる?
(VRHMDつけてオフボアも良いけど、解像度が足らなくって文字がとても読みづらい。マウスも扱いづらい。。)
一連の作業で、このロック関連の画面上のカーソル操作の作業が一番やりづらい。
あとは、ミサイルの回避。捕捉作業を粘ってると落としたと同時に落とされることも多い。
機体とか電子系を順次新しくするより慣れてる方が重要のようで、改良は今もそれほど無いようである。
Falcon4.0のようなポーズ状態で計器は操作できる「フリーズモード」が欲しいとこ。
で、F/A-18CとF-16Cの操縦桿の多機能性を挙げると、
F-16Cの方が多機能であるコトが判った。
親指を載せる部分は、5ポジションボタンであり、トリガ以外にも人差し指で押すボタンもある。
F-16CとA-10Cは同じ操縦桿に思えるのだが、スラストマスターHOTASは、別々に出している。
また、DCSの操作では、F/A-18Cスティックでも5ポジションになってるっぽい。故にスラストマスターもそれに準じている。妙なダイヤルもある。
つまり、スラストマスターのF/A-18Cレプリカスティックは、忠実とは言えず、高いモノですし買わなくって正解だった感じがします。
−−−−−−−−−−−−−−−−−−−−
マイクロソフトフライトシミュレーター2020
ぽちったというか、HPのHMDが来る前に、購入して慣れておきたいと思いまして。
153GBのDLに3時間…、
スイッチの位置は、ベストかというと、隙間に入れてる感じでかなりキツキツだったので、この選択肢しかなかった感じ。でも、まあ、妥当な位置かな?
ホントは、トグルSWなども付けたかったのですが、内部構造的に、付ける隙間的な余裕が殆ど無いのでムリでした。
スイッチは、
・人差し指の左右に来るスイッチ、人差し指でHATを扱うとき、丁度この二つをまたぐ配置。案外妥当な位置。
・その上のスイッチ<緊急性の無いアフターバーナー有効化に固定。
・ピンキースイッチ:まあ、いつもあるような小指で操作するスイッチ。
それにしても、F-16CとF/A-18Cの計器の扱い方はかなり違う感じです。
あと、
DCSでも、機種依存なのが、
レーダーアンテナ上下とか、スピードブレーキかな?
フラップや車輪はだいたい250ノット以上だと使えないようなので、
HOTASに入れる必要は無さそう、
ARMスイッチも雰囲気的には、パネルにあると盛り上がりそうですね。
スピードブレーキは反応が鈍いしエネルギーを失うので、戦闘時はマズ使わないし、
チャフ、フレア同時放出は,緊急事態時なので、F/A-18CではHOTASに入ってないでサイドをウオールですね。
ここは、F-16Cと違うとこ。
++++++++++++++++++++
DCSでF-16CのA-AなSweepを簡易ミッションで練習プレイしてるけど、
F-16Cでは、
HAT-SWのカーソルで、レーダーモニタ上の敵を捕捉、ロックする必要がある。
ロールしたりすると、すぐロックが外れる?
(VRHMDつけてオフボアも良いけど、解像度が足らなくって文字がとても読みづらい。マウスも扱いづらい。。)
一連の作業で、このロック関連の画面上のカーソル操作の作業が一番やりづらい。
あとは、ミサイルの回避。捕捉作業を粘ってると落としたと同時に落とされることも多い。
機体とか電子系を順次新しくするより慣れてる方が重要のようで、改良は今もそれほど無いようである。
Falcon4.0のようなポーズ状態で計器は操作できる「フリーズモード」が欲しいとこ。
で、F/A-18CとF-16Cの操縦桿の多機能性を挙げると、
F-16Cの方が多機能であるコトが判った。
親指を載せる部分は、5ポジションボタンであり、トリガ以外にも人差し指で押すボタンもある。
F-16CとA-10Cは同じ操縦桿に思えるのだが、スラストマスターHOTASは、別々に出している。
また、DCSの操作では、F/A-18Cスティックでも5ポジションになってるっぽい。故にスラストマスターもそれに準じている。妙なダイヤルもある。
つまり、スラストマスターのF/A-18Cレプリカスティックは、忠実とは言えず、高いモノですし買わなくって正解だった感じがします。
−−−−−−−−−−−−−−−−−−−−
マイクロソフトフライトシミュレーター2020
ぽちったというか、HPのHMDが来る前に、購入して慣れておきたいと思いまして。
153GBのDLに3時間…、
 最初、実行して、コントローラーの設定。
自作の、スロットル、スティック二台別々でも使えます。多分、ペダルを別にしてる人でもOK。
設定は、あまりやりやすいとは思えないので改良されるのを待ちたい気分。
スロットルはグラフで+方向が、ミニマムなので、これはバグでしょうね…
飛ぼうとすると画面が切り替わる直前に何度も落ちるので、
PCを再起動してちっちゃな画面でやっと飛ぶ…、
で、ステータスを見てたら、メモリーが足らずそこで落ちてたので、HDDにメモリースワップを64GB設定。
(断片化を避けるため、最大=最小の設定にすること)
4Kの最高画質に近い設定で飛んでみてみて、フレームレートはちょっとギリギリですが、昔のフライトシムの事を考えれば問題無し。
画質は、緻密と言えばそんな感じ。道とか川とかの判別はちょいアレかも?
一般の建物の高さが整いすぎてるかも。
どこかのパラメタをもうちょっと落とせばフレームレートはそれなりかも。
で、自分の家に向かおうと思うのですが、PCのディスプレイだと、視界を見渡せないのでよくわからない。
で、VRに切り替えると、ビルの壁面などの画質(質感)がかなり落ちた感じがしました。
まあ、フレームレート的にもギリギリ使えるような?でも、頭の動きには遅れやカク付きは見られない。
でもって、自分の家なのですが、、屋根のテクスチャがある空き地?になってた…。そこはGoogleEarthのFlightモードの方が正しい?
最初、実行して、コントローラーの設定。
自作の、スロットル、スティック二台別々でも使えます。多分、ペダルを別にしてる人でもOK。
設定は、あまりやりやすいとは思えないので改良されるのを待ちたい気分。
スロットルはグラフで+方向が、ミニマムなので、これはバグでしょうね…
飛ぼうとすると画面が切り替わる直前に何度も落ちるので、
PCを再起動してちっちゃな画面でやっと飛ぶ…、
で、ステータスを見てたら、メモリーが足らずそこで落ちてたので、HDDにメモリースワップを64GB設定。
(断片化を避けるため、最大=最小の設定にすること)
4Kの最高画質に近い設定で飛んでみてみて、フレームレートはちょっとギリギリですが、昔のフライトシムの事を考えれば問題無し。
画質は、緻密と言えばそんな感じ。道とか川とかの判別はちょいアレかも?
一般の建物の高さが整いすぎてるかも。
どこかのパラメタをもうちょっと落とせばフレームレートはそれなりかも。
で、自分の家に向かおうと思うのですが、PCのディスプレイだと、視界を見渡せないのでよくわからない。
で、VRに切り替えると、ビルの壁面などの画質(質感)がかなり落ちた感じがしました。
まあ、フレームレート的にもギリギリ使えるような?でも、頭の動きには遅れやカク付きは見られない。
でもって、自分の家なのですが、、屋根のテクスチャがある空き地?になってた…。そこはGoogleEarthのFlightモードの方が正しい?

 固定した景色を見たり、かくれんぼは、ヘリが良いのですが、まだ無いみたい。
TrackIRにも対応してるので高画質を維持したいなら…、、
アクティブポーズという、Falcon4.0でのフリーズと同じ、
計器とか扱えるけど、時間を止めてるモードがあります。
が、スロットルの影響で、速度ゲージだけが動くのもバグでしょう。それともコレでリカバリーさせる?
とりあえず、CPU負荷的にはまだ余裕があるようです。
ドライブはm2なSSDにしてますが、ロードに結構時間がかかりますです。
フライトモデルもそれほど不満は無かったです。ラダーの効きがが少々弱いのは設定かな?
それはそうと、DCSにてAH-64アパッチが出るらしいですね。秋頃かな?
追記>
VR画面は、VRの状態で弄らないと駄目なのかな?
アプデされたてのイギリスの上空はちょっと重いらしくカク付くような。
グラボはRTX3060TIです。
低空ではFPSやレースゲームのようなリアリティーは、まだ無いです。
東京埼玉などの住宅やビル密集地域のゴミゴミした感じは弱いです。
そこは、空気の汚れのエフェクトとか、建物の寸法や、テクスチャの色合い、今後、他社がシーナリーを出すかも。
普通画面で勝手に羽田に着陸、右からの横風がつよいような気もしたけど。
滑走路がデカいのでかなりラクですね。
固定した景色を見たり、かくれんぼは、ヘリが良いのですが、まだ無いみたい。
TrackIRにも対応してるので高画質を維持したいなら…、、
アクティブポーズという、Falcon4.0でのフリーズと同じ、
計器とか扱えるけど、時間を止めてるモードがあります。
が、スロットルの影響で、速度ゲージだけが動くのもバグでしょう。それともコレでリカバリーさせる?
とりあえず、CPU負荷的にはまだ余裕があるようです。
ドライブはm2なSSDにしてますが、ロードに結構時間がかかりますです。
フライトモデルもそれほど不満は無かったです。ラダーの効きがが少々弱いのは設定かな?
それはそうと、DCSにてAH-64アパッチが出るらしいですね。秋頃かな?
追記>
VR画面は、VRの状態で弄らないと駄目なのかな?
アプデされたてのイギリスの上空はちょっと重いらしくカク付くような。
グラボはRTX3060TIです。
低空ではFPSやレースゲームのようなリアリティーは、まだ無いです。
東京埼玉などの住宅やビル密集地域のゴミゴミした感じは弱いです。
そこは、空気の汚れのエフェクトとか、建物の寸法や、テクスチャの色合い、今後、他社がシーナリーを出すかも。
普通画面で勝手に羽田に着陸、右からの横風がつよいような気もしたけど。
滑走路がデカいのでかなりラクですね。
 VRは、近くないと、ビルの本数とか制限してる感じ。
でも、遠くのモノって両目変わらないのですですから負荷は少ないような。
今のとこ、機敏さとは別に、不安定性は穏やかな特性に思ってます、失速やきりもみで落としたことがないので、、
やっぱ、GoogleMAPの方が正確なので、
それと置き換えようというModなプロジェクトが沢山有るようです。
−−−−−−−−−−−−−−−−−−−−
210226
BingMAPベースでは貧相なので、GoogleMAPの地形を変換して入れようというというのが沢山有って、
「Google Earth Decoder」なるツールなモノも有りますようです。
注意点はmodごとにフォルダに格納されてるので、
modがフォルダに入ってない場合フォルダを作って入れるコト。
ここのは、1からモデリングしているっぽいです。
http://fsx.o.oo7.jp/
試しに、横浜は貧相でしたが、かなりよくなりました。
けっこう急降下してのスクショです。
VRは、近くないと、ビルの本数とか制限してる感じ。
でも、遠くのモノって両目変わらないのですですから負荷は少ないような。
今のとこ、機敏さとは別に、不安定性は穏やかな特性に思ってます、失速やきりもみで落としたことがないので、、
やっぱ、GoogleMAPの方が正確なので、
それと置き換えようというModなプロジェクトが沢山有るようです。
−−−−−−−−−−−−−−−−−−−−
210226
BingMAPベースでは貧相なので、GoogleMAPの地形を変換して入れようというというのが沢山有って、
「Google Earth Decoder」なるツールなモノも有りますようです。
注意点はmodごとにフォルダに格納されてるので、
modがフォルダに入ってない場合フォルダを作って入れるコト。
ここのは、1からモデリングしているっぽいです。
http://fsx.o.oo7.jp/
試しに、横浜は貧相でしたが、かなりよくなりました。
けっこう急降下してのスクショです。
 実際日本全てよくするには、相当な容量になるので、
シーナリーは、オンラインだと良いかも?
−−−−−−−−−−−−−−−−−−−−
機体はX-Wingとか入れて見ました
フライトモデルは、安定性悪い機体でしたが…、
実際日本全てよくするには、相当な容量になるので、
シーナリーは、オンラインだと良いかも?
−−−−−−−−−−−−−−−−−−−−
機体はX-Wingとか入れて見ました
フライトモデルは、安定性悪い機体でしたが…、
 −−−−−−−−−−−−−−−−−−−−
で、普通の機体で、夜間の横田基地に着陸。
キーは何も設定してなかったので、止めるのに苦労しました。
−−−−−−−−−−−−−−−−−−−−
で、普通の機体で、夜間の横田基地に着陸。
キーは何も設定してなかったので、止めるのに苦労しました。
 ILS使ってフラップとかチョークとかブレーキとか操作するのが普通なので、単なる感覚でやっておりまして…。
そういえば、既知の問題で、フラップで減速効果が無いとか??
でもまあ、まずは、
設定キーは、フラップとホイールブレーキは必要そう。
だが、HOTASだとどのボタンがどの番号か判りづらいので、
別途ジョイスティックボタンモニター用意してそれを見ながらヤルとイイと思いました。
MSFSはWindowモードで表示します。
と思ったら、MSFS上でセレクトスキャンというボタンを押せば良いらしい。
ボタンの形とかわかりやすくして欲しかった。
−−−−−−−−−−−−−−−−−−−−
視界的にぐりぐり回るには、そんなに計算に負担はかからないけど、
特に低空で「進む」と言う行為はぶれやすいと思いました。
これはどうなのかな?
https://www.justflight.com/product/dc-designs-f15-c-d-e-i-eagle-microsoft-flight-simulator
−−−−−−−−−−−−−−−−−−−−
着陸進入しながら、日の出をきた感じ。
VRだと、遠くで目視で進入角度を見分けるのは難しい。
ILS使ってフラップとかチョークとかブレーキとか操作するのが普通なので、単なる感覚でやっておりまして…。
そういえば、既知の問題で、フラップで減速効果が無いとか??
でもまあ、まずは、
設定キーは、フラップとホイールブレーキは必要そう。
だが、HOTASだとどのボタンがどの番号か判りづらいので、
別途ジョイスティックボタンモニター用意してそれを見ながらヤルとイイと思いました。
MSFSはWindowモードで表示します。
と思ったら、MSFS上でセレクトスキャンというボタンを押せば良いらしい。
ボタンの形とかわかりやすくして欲しかった。
−−−−−−−−−−−−−−−−−−−−
視界的にぐりぐり回るには、そんなに計算に負担はかからないけど、
特に低空で「進む」と言う行為はぶれやすいと思いました。
これはどうなのかな?
https://www.justflight.com/product/dc-designs-f15-c-d-e-i-eagle-microsoft-flight-simulator
−−−−−−−−−−−−−−−−−−−−
着陸進入しながら、日の出をきた感じ。
VRだと、遠くで目視で進入角度を見分けるのは難しい。
 今度は、フラップを15°に出して。
遅い機体なのもアリ、綺麗に角度も良く、真ん中に着地したんだけど、
エンジン止めるのに手間取って脱線しかかった…。
今度は、フラップを15°に出して。
遅い機体なのもアリ、綺麗に角度も良く、真ん中に着地したんだけど、
エンジン止めるのに手間取って脱線しかかった…。
 VRじゃなくっても、ディスプレーの地図でやっと自宅を見つけられた。
VRじゃなくっても、ディスプレーの地図でやっと自宅を見つけられた。
 ちなみに、このまま、前の空港に直線で侵入できることが判明。
短いので、操作に手間取ってたら、ギリギリオーバーランディングしそうに。
ちなみに、このまま、前の空港に直線で侵入できることが判明。
短いので、操作に手間取ってたら、ギリギリオーバーランディングしそうに。
 戦闘機で、空母とかだと、かなり難しそうだ〜
−−−−−−−−−−−−−−−−−−−−
++++++++++++++++++++
フライトモノに、メモリーとかLANケーブルとか。-:??
フライトモノに、メモリーとかLANケーブルとか
DCSも32GBのメモリーギリギリ使用であるけど、MSFS2020は32GB積んでてもメモリースワップが無いとムリ。
ふつうにファイルとかDLしてても200Mbps位しか出ないので。1G近くは見たことも無いですね。
回線が問題かなー、と思って、プアだったCAT5ケーブルを、10m799円の安いCAT8にしてみた。
あまりよく覚えてないけど、通信速度は上り下りともに550Mbps程度、すこし速くなったみたいだけど。
MSFS2020で飛ばしながら、通信速度をモニタしても、そんなに通信してないのであまり無意味に近かったという。。
GoogleMAPとかは、それなりに速度があるようですが。
ただ、スワップを設定したため、PC自体の反応が、かなりもっさりと重くなりました。
例えば、ブラウザの反応など…。
上手い方法はないのですかね〜…、、、
戦闘機で、空母とかだと、かなり難しそうだ〜
−−−−−−−−−−−−−−−−−−−−
++++++++++++++++++++
フライトモノに、メモリーとかLANケーブルとか。-:??
フライトモノに、メモリーとかLANケーブルとか
DCSも32GBのメモリーギリギリ使用であるけど、MSFS2020は32GB積んでてもメモリースワップが無いとムリ。
ふつうにファイルとかDLしてても200Mbps位しか出ないので。1G近くは見たことも無いですね。
回線が問題かなー、と思って、プアだったCAT5ケーブルを、10m799円の安いCAT8にしてみた。
あまりよく覚えてないけど、通信速度は上り下りともに550Mbps程度、すこし速くなったみたいだけど。
MSFS2020で飛ばしながら、通信速度をモニタしても、そんなに通信してないのであまり無意味に近かったという。。
GoogleMAPとかは、それなりに速度があるようですが。
ただ、スワップを設定したため、PC自体の反応が、かなりもっさりと重くなりました。
例えば、ブラウザの反応など…。
上手い方法はないのですかね〜…、、、
 ++++++++++++++++++++
MSFS2020の重さの原因
グランドキャニオン
おもったよりポリゴン数が少ないようで、
結構プルプルするとこまであるのだけど。
フレームレートは変わらず。という感じ。
まあ、名所のハズなのに。この出来では。
++++++++++++++++++++
MSFS2020の重さの原因
グランドキャニオン
おもったよりポリゴン数が少ないようで、
結構プルプルするとこまであるのだけど。
フレームレートは変わらず。という感じ。
まあ、名所のハズなのに。この出来では。
 MSFS2020は、DX11使用なのだけど。
グラボへの最適化が甘いのかも。
GoogleEarth
MSFS2020は、DX11使用なのだけど。
グラボへの最適化が甘いのかも。
GoogleEarth
 GoogleEarthのフライトモードの場合。
GoogleEarthのフライトモードの場合。
 ジョイスティックが正常にアサインされないのが残念なとこ。あと、気象エフェクト、VRモードが無い。
++++++++++++++++++++
感圧操縦桿と最近の位置コントロール操縦桿の違い。-:??
通常のジョイスティックは、突起をスプリングで挟むような物がおおいと思う。
特性として、ある程度荷重を受けると傾きはじめ、それ以上はわりと定荷重に近い感じ。
スティックの位置制御として、センターがハッキリしてて、操作はしやすいかも。
それに対し、量極端な位置に存在すると思う、
フォースコントロールは、位置コントールと比べ、直感的かも。
比較的、切り返しが速い。
++++++++++++++++++++
富士山上空、ぐるぐる回りながら上がった。
越えられないと思ってたけど、この機体では、15000ft位行くかも。
ジョイスティックが正常にアサインされないのが残念なとこ。あと、気象エフェクト、VRモードが無い。
++++++++++++++++++++
感圧操縦桿と最近の位置コントロール操縦桿の違い。-:??
通常のジョイスティックは、突起をスプリングで挟むような物がおおいと思う。
特性として、ある程度荷重を受けると傾きはじめ、それ以上はわりと定荷重に近い感じ。
スティックの位置制御として、センターがハッキリしてて、操作はしやすいかも。
それに対し、量極端な位置に存在すると思う、
フォースコントロールは、位置コントールと比べ、直感的かも。
比較的、切り返しが速い。
++++++++++++++++++++
富士山上空、ぐるぐる回りながら上がった。
越えられないと思ってたけど、この機体では、15000ft位行くかも。
 …スペック表みたら、丁度15000ftと書いてあった。
画像では、降下気味ですが、一旦14200ft位まで上がってました。
15000はかなり時間がかかりそう。
210407
H135のmod。挙動はちょっと違うかも?
家の上空を飛ぶけど、着陸は難しそうで出来ない。VRでも、やっぱ重力感覚が無いと。
…スペック表みたら、丁度15000ftと書いてあった。
画像では、降下気味ですが、一旦14200ft位まで上がってました。
15000はかなり時間がかかりそう。
210407
H135のmod。挙動はちょっと違うかも?
家の上空を飛ぶけど、着陸は難しそうで出来ない。VRでも、やっぱ重力感覚が無いと。
 210408
「Aerofly FS 2」というのを購入。MSFS2020より小型機の挙動はリアルかも。
でも、戦闘機はDCSより、かなり素直で旋回中のエネルギーロスも少ない。まあ、DCSの方が無用にロスしてる感じも。
そして、ソフト起動が軽い。でも、無料DLCを落とすと、容量が百うん十GBに。
210408
「Aerofly FS 2」というのを購入。MSFS2020より小型機の挙動はリアルかも。
でも、戦闘機はDCSより、かなり素直で旋回中のエネルギーロスも少ない。まあ、DCSの方が無用にロスしてる感じも。
そして、ソフト起動が軽い。でも、無料DLCを落とすと、容量が百うん十GBに。
 210410
VR-HMD 「HP Reverb G2」が届きました。
ソフトによって結構重いですが、いつかレビューを書きたいと思います。
210112
MMJOY2とかの沢山のボタンの基板をユニバーサル基板でやってるのって効率悪いので、
基板製作業者にやって貰った方が良いかも、なんて思いました。
一つの基板にIC三つくらいに小分けしてみるとやりやすいかも。
ブログに広告が出てた。
https://www.pcbway.jp/
とか
++++++++++++++++++++
++++++++++++++++++++
接点復活と維持02-:??
今回は、フェーダー(可変抵抗)のガリがメイン。
評判が良いのは、
・ガリ取りくん
・AZ 接点復活Pro 960
・ケイグのフェーダー用
・タミヤの接点グリス。(保護潤滑)
今回はガリ取り君を選んだ。
AZのは、レビュー数、評判が良かったが、どこも送料が高いので、実店舗でどうか?という感じ。化学合成油と防さび剤と書いてあって、かなりドロッとしてるらしい。
あと、良くやるのは、接点復活王でタミヤの接点グリスを送り込む方法。
フェーダー用は、塗布部分によくとどまって潤滑も必要なので、グリース状のドロッとしてる必要性もある。
可変抵抗器は密閉の場合、分解や、穴開けなど必要だったりする。スイッチ類も同様。
因みに、接点復活としてはケイグは、Dが洗浄Gが保護らしい。
接点の還元作用を謳ってる。
今まで、ケイグを選ばない理由としては、高いのもあるけど、
欧米のケミカルスプレーは、首が折れたり、ガスが抜けたり、良い思い出がない。原液は高い。
また、車のケミカルのように何にでも効くような都合の良い大げさ触れ込みの過大な宣伝も多い。
ケイグの評価は楽器でのソレしか使ったことのない人の評価が多く、
単なる即効性でCRCに変えた人も結構居る。それが正解かは不明ではあるけど。。
樹脂を侵さないか?とかノンシリコンか?というのもある。
接点復活系は、メインとする効能がそれぞれ違う。
・カーボン、酸化、硫化ブツの除去。(洗浄)
・修復(還元?、ナノカーボンなど)
・保護(皮膜、潤滑)
接点ブライトは、水溶性のさび取り剤のようなモノで、硫黄由来の匂いがする。それゆえ、汚れを落としたら最後に水による洗浄が必須。
接点洗浄剤、リレークリーナーは、アルコール系が多い。
RCなど大電流を流すコネクタなどには、ナノカーボンが良かった。抜き差しもスムーズになる。
Cdsとバイメタルを用いた外灯のリレーは、紙やすりなどで接点を磨いても、3日ほどで駄目になってたのが、タミヤの接点グリースで3年は持った記憶がある。何らかの物質が接点を強力に保護してるようである。
ただし、接点抵抗は高めだと思うので、普通のリレー接点のようなモノに接点復活剤は、、適材適所かと。
ジョイスティックのスラストマスター等では、過酷に使用する可変抵抗に黒い色したグリースを使ってた。多分カーボンだろうけど、それ自体が潤滑性能があるのかも。
保護とかは、接点復活王のゴールドを使うことが多い。プラもOKだし。
CRCのは、プラOKとあるが、鉱物油だし、クラックが入ったりも聞く。あまり信用できない。
どれも、ほころびの修繕なので、定期メンテが前提で必要な感じも多い。
あと、ベタベタしてるので、汚れを吸着しやすい場合もある。
塗布などの道具として、先の細い工業用綿棒や注射器(インジェクター[鈍針]付き)が有効。
210410
VR-HMD 「HP Reverb G2」が届きました。
ソフトによって結構重いですが、いつかレビューを書きたいと思います。
210112
MMJOY2とかの沢山のボタンの基板をユニバーサル基板でやってるのって効率悪いので、
基板製作業者にやって貰った方が良いかも、なんて思いました。
一つの基板にIC三つくらいに小分けしてみるとやりやすいかも。
ブログに広告が出てた。
https://www.pcbway.jp/
とか
++++++++++++++++++++
++++++++++++++++++++
接点復活と維持02-:??
今回は、フェーダー(可変抵抗)のガリがメイン。
評判が良いのは、
・ガリ取りくん
・AZ 接点復活Pro 960
・ケイグのフェーダー用
・タミヤの接点グリス。(保護潤滑)
今回はガリ取り君を選んだ。
AZのは、レビュー数、評判が良かったが、どこも送料が高いので、実店舗でどうか?という感じ。化学合成油と防さび剤と書いてあって、かなりドロッとしてるらしい。
あと、良くやるのは、接点復活王でタミヤの接点グリスを送り込む方法。
フェーダー用は、塗布部分によくとどまって潤滑も必要なので、グリース状のドロッとしてる必要性もある。
可変抵抗器は密閉の場合、分解や、穴開けなど必要だったりする。スイッチ類も同様。
因みに、接点復活としてはケイグは、Dが洗浄Gが保護らしい。
接点の還元作用を謳ってる。
今まで、ケイグを選ばない理由としては、高いのもあるけど、
欧米のケミカルスプレーは、首が折れたり、ガスが抜けたり、良い思い出がない。原液は高い。
また、車のケミカルのように何にでも効くような都合の良い大げさ触れ込みの過大な宣伝も多い。
ケイグの評価は楽器でのソレしか使ったことのない人の評価が多く、
単なる即効性でCRCに変えた人も結構居る。それが正解かは不明ではあるけど。。
樹脂を侵さないか?とかノンシリコンか?というのもある。
接点復活系は、メインとする効能がそれぞれ違う。
・カーボン、酸化、硫化ブツの除去。(洗浄)
・修復(還元?、ナノカーボンなど)
・保護(皮膜、潤滑)
接点ブライトは、水溶性のさび取り剤のようなモノで、硫黄由来の匂いがする。それゆえ、汚れを落としたら最後に水による洗浄が必須。
接点洗浄剤、リレークリーナーは、アルコール系が多い。
RCなど大電流を流すコネクタなどには、ナノカーボンが良かった。抜き差しもスムーズになる。
Cdsとバイメタルを用いた外灯のリレーは、紙やすりなどで接点を磨いても、3日ほどで駄目になってたのが、タミヤの接点グリースで3年は持った記憶がある。何らかの物質が接点を強力に保護してるようである。
ただし、接点抵抗は高めだと思うので、普通のリレー接点のようなモノに接点復活剤は、、適材適所かと。
ジョイスティックのスラストマスター等では、過酷に使用する可変抵抗に黒い色したグリースを使ってた。多分カーボンだろうけど、それ自体が潤滑性能があるのかも。
保護とかは、接点復活王のゴールドを使うことが多い。プラもOKだし。
CRCのは、プラOKとあるが、鉱物油だし、クラックが入ったりも聞く。あまり信用できない。
どれも、ほころびの修繕なので、定期メンテが前提で必要な感じも多い。
あと、ベタベタしてるので、汚れを吸着しやすい場合もある。
塗布などの道具として、先の細い工業用綿棒や注射器(インジェクター[鈍針]付き)が有効。
 で、ガリ取りくんは、少しとろっとしてるが、それほど粘性が高いモノではない。
その点は、AZ 接点復活Pro 960の方がドロッとしてるようで、フェーダー向きかも知れないが…、
なので、ガリが治ってるのを維持できる時間は、後者の方が長いかも知れない。
ジャックは薄く刷毛塗りとあったが、拭き取るわけでもなく、油脂であるので、
インピーダンスの低い、イヤホンのジャックにはナノカーボンの方が向いてるかも。
で、使って見ようと、買った時点でガリっぽかった、秋月の安い50KΩ(A)を使った自作ヘッドフォンAMP。
使ってるウチに、ガリが殆ど消えてしまったが、
塗りやすいので塗ってみたら、完全にガリっぽい音が無くなった。
−−−−−−−−−−−−−−−−−−−−
他製品も見て見るに、
接点グリスとして、キタコ(KITACO) カーボングリスが安くてとも思うけど導電しすぎるかも?ただ、精製鉱物油が入ってる。
安いので、フェーダー用に試してみたいので注文。タミヤのと混ぜて使うかも。
あと、ケイグのGシリーズの還元性は昔見たデマのようですね。
メーカーの紹介文に「剥がれたメッキを取り戻す事は出来ませんので、新品のパーツへ使用する事で効果を発揮します。」
って書いてある。還元とは微妙に違うが、そういう感じだろうと。
やはり、ボンベのガス抜けは結構あるようですね。そうなったら穴開けて別のガラス瓶などに移す位ですね。
ただ、Dシリーズを使ってからGシリーズを使うとかなり持つとか。
最初から使ってると、金属めっきのカジリが少ないとかいう予防効果の利点が。もうかじってしまったモノにもある程度の効果があれば…、
サンハヤトのFC-901コンタクトリバイバーって少なくてとても高いけど??アコースティックリヴァイブと同等とか書いてある…、
接点が完全に近く復活復元するなら、交換できないモノとかあるので、万がかかっても価値があるとは思うけど…。
ワコーズ CR-W 接点復活剤 潤滑タイプ A470は2500円とそれなりの値段でポリマーな導電皮膜が云々。ポリマーというとこがちょっと気になる。
個人的には、金めっきなどのプラグでも結構ガリがあるモノが有りますので、
フェーダーはともかくプラグがべたつくのはヤなので、塗って、時間を置いてから拭き取っても効果があるようなのが良いですね。
で、まあ、Walkmanの端子の緩さもあり、プラグによってガリが出るもんで、Gシリーズなスプレーを注文しました。(続く)
期待するモノ。
・べたつきを拭き取ってOKか?遜色ないか?
・皮膜の持続性
−−−−−−−−−−−−−−−−−−−−
ガリを取る接点復活。。
前からの続き。
で、ガリ取りくんは、少しとろっとしてるが、それほど粘性が高いモノではない。
その点は、AZ 接点復活Pro 960の方がドロッとしてるようで、フェーダー向きかも知れないが…、
なので、ガリが治ってるのを維持できる時間は、後者の方が長いかも知れない。
ジャックは薄く刷毛塗りとあったが、拭き取るわけでもなく、油脂であるので、
インピーダンスの低い、イヤホンのジャックにはナノカーボンの方が向いてるかも。
で、使って見ようと、買った時点でガリっぽかった、秋月の安い50KΩ(A)を使った自作ヘッドフォンAMP。
使ってるウチに、ガリが殆ど消えてしまったが、
塗りやすいので塗ってみたら、完全にガリっぽい音が無くなった。
−−−−−−−−−−−−−−−−−−−−
他製品も見て見るに、
接点グリスとして、キタコ(KITACO) カーボングリスが安くてとも思うけど導電しすぎるかも?ただ、精製鉱物油が入ってる。
安いので、フェーダー用に試してみたいので注文。タミヤのと混ぜて使うかも。
あと、ケイグのGシリーズの還元性は昔見たデマのようですね。
メーカーの紹介文に「剥がれたメッキを取り戻す事は出来ませんので、新品のパーツへ使用する事で効果を発揮します。」
って書いてある。還元とは微妙に違うが、そういう感じだろうと。
やはり、ボンベのガス抜けは結構あるようですね。そうなったら穴開けて別のガラス瓶などに移す位ですね。
ただ、Dシリーズを使ってからGシリーズを使うとかなり持つとか。
最初から使ってると、金属めっきのカジリが少ないとかいう予防効果の利点が。もうかじってしまったモノにもある程度の効果があれば…、
サンハヤトのFC-901コンタクトリバイバーって少なくてとても高いけど??アコースティックリヴァイブと同等とか書いてある…、
接点が完全に近く復活復元するなら、交換できないモノとかあるので、万がかかっても価値があるとは思うけど…。
ワコーズ CR-W 接点復活剤 潤滑タイプ A470は2500円とそれなりの値段でポリマーな導電皮膜が云々。ポリマーというとこがちょっと気になる。
個人的には、金めっきなどのプラグでも結構ガリがあるモノが有りますので、
フェーダーはともかくプラグがべたつくのはヤなので、塗って、時間を置いてから拭き取っても効果があるようなのが良いですね。
で、まあ、Walkmanの端子の緩さもあり、プラグによってガリが出るもんで、Gシリーズなスプレーを注文しました。(続く)
期待するモノ。
・べたつきを拭き取ってOKか?遜色ないか?
・皮膜の持続性
−−−−−−−−−−−−−−−−−−−−
ガリを取る接点復活。。
前からの続き。
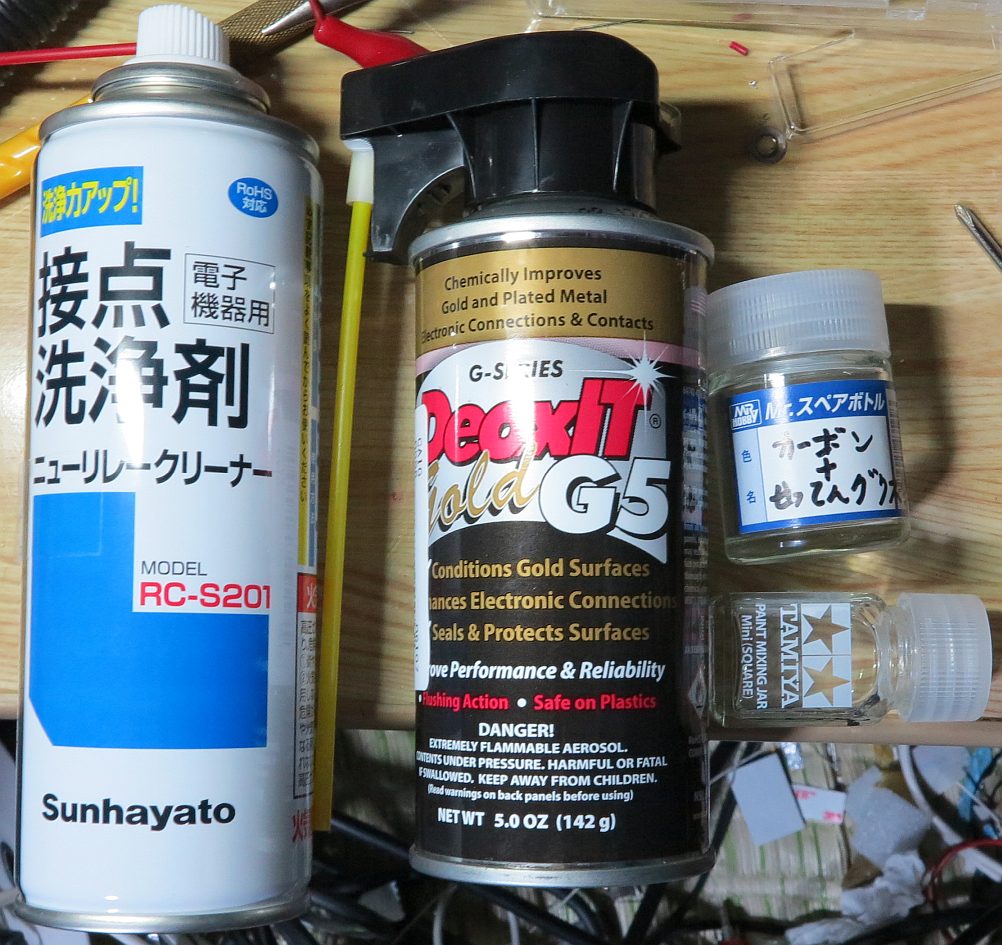 ケイグGシリーズが届いた。 <朝注文で昼過ぎに届くというSoundHouse。
基本、保護用途である。<洗浄は別の液で。接点の復活はやはり持続性が難点と言われてるのでそこが主眼。
電話のモジュラージャックと、Walkmanとつなぐポタアンやヘッドフォンプラグ。<液はジャックの穴に吹き込むのは危険であるので、こっちに塗って差し込みぐりぐりとやるつもり。。
リレークリーナーを(工業用)綿棒につけて洗浄してから、
(リレークリーナーはカーボンメインで、酸化、硫化物はあまり有効ではないらしい。が、相手が汚れの少ない金めっきなので、)
で、これも綿棒に付けようかと思ったら…、
スプレーは、そっとやってもとんでもなくすさまじい。30〜50cm四方八方に飛散する。ノズルの径がデカいのもある。
こんなガサツな作りで、中の液はしっかりした組成のモノなのだろうか?
とにかく、ビニール袋の中か、タミヤのガラスの塗料瓶を買ってきてその中に吹き込むか?
ただ、数十分おくと、かなり乾いてしまうという感じ。とはいえ、プラモ用の塗料の瓶に入れておけば揮発せず持つ感じである。瓶を冷蔵庫に入れると保存性がよさそう。
とりあえず、ステレオプラグのガリガリ感はなくなった。モジュラーは激しく横に動かすと僅かにシャリシャリ言うが、これは接点周辺の構造上のことかも。二度塗りしたら一応完全と思えるまでになった。
暫くしたら、から拭きしようかと迷ったが、このままでもOKそうである。
でもって、自作ジョイスティックの電源ジャックの部分がしつこくガリっぽかったので、同じように清掃、塗布してみたところ、問題無く、プラグを弄っても数値が動かなくなった。
ケイグGシリーズが届いた。 <朝注文で昼過ぎに届くというSoundHouse。
基本、保護用途である。<洗浄は別の液で。接点の復活はやはり持続性が難点と言われてるのでそこが主眼。
電話のモジュラージャックと、Walkmanとつなぐポタアンやヘッドフォンプラグ。<液はジャックの穴に吹き込むのは危険であるので、こっちに塗って差し込みぐりぐりとやるつもり。。
リレークリーナーを(工業用)綿棒につけて洗浄してから、
(リレークリーナーはカーボンメインで、酸化、硫化物はあまり有効ではないらしい。が、相手が汚れの少ない金めっきなので、)
で、これも綿棒に付けようかと思ったら…、
スプレーは、そっとやってもとんでもなくすさまじい。30〜50cm四方八方に飛散する。ノズルの径がデカいのもある。
こんなガサツな作りで、中の液はしっかりした組成のモノなのだろうか?
とにかく、ビニール袋の中か、タミヤのガラスの塗料瓶を買ってきてその中に吹き込むか?
ただ、数十分おくと、かなり乾いてしまうという感じ。とはいえ、プラモ用の塗料の瓶に入れておけば揮発せず持つ感じである。瓶を冷蔵庫に入れると保存性がよさそう。
とりあえず、ステレオプラグのガリガリ感はなくなった。モジュラーは激しく横に動かすと僅かにシャリシャリ言うが、これは接点周辺の構造上のことかも。二度塗りしたら一応完全と思えるまでになった。
暫くしたら、から拭きしようかと迷ったが、このままでもOKそうである。
でもって、自作ジョイスティックの電源ジャックの部分がしつこくガリっぽかったので、同じように清掃、塗布してみたところ、問題無く、プラグを弄っても数値が動かなくなった。
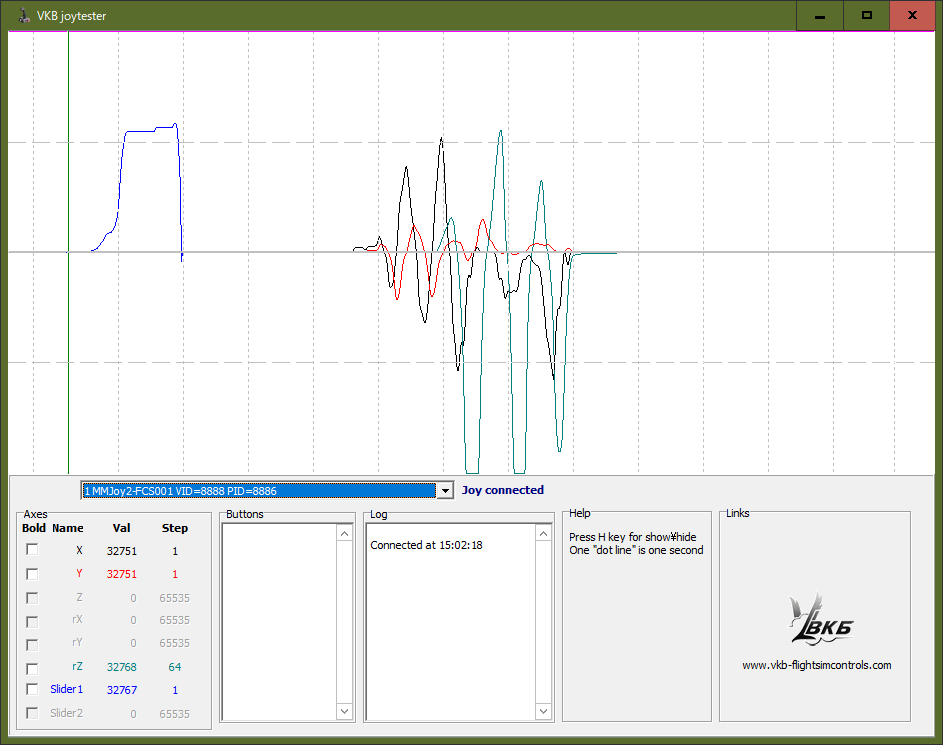 操作後、手を離すと、完全にセンターに戻る。
油でギトギトした感じがないのが良いイメージ、
あとは売り文句のその持続性がどうなるかである。
次は、
キタコ(KITACO) カーボングリスのフェーダーへの使用かな。<成分:精製鉱油・黒鉛添加剤・微粒子カーボン(40nm以下)
操作後、手を離すと、完全にセンターに戻る。
油でギトギトした感じがないのが良いイメージ、
あとは売り文句のその持続性がどうなるかである。
次は、
キタコ(KITACO) カーボングリスのフェーダーへの使用かな。<成分:精製鉱油・黒鉛添加剤・微粒子カーボン(40nm以下)
 まずは、2極端子にははみ出るとショートするとか有るので、導電性がありすぎるか様子を見る。
タミヤ接点グリスや接点復活王もまぜるか?
あとは塗りつけ方法、フェーダーだから、構造的に高粘度の状態で流し込みは難しい。エアダスターで送り込むか、接点復活剤に入ってる溶剤か?
スラストマスターのコントロールスティックの可変抵抗には黒いグリースが使われ、潤滑と保護が目的のようだが、可変抵抗は100KΩ程度。
これの抵抗値を乱さないレベルで、似たようなモノにしたい。
(粒子が入ると、粘性が上がるが、非ニュートン粘弾性があると、絡みついて良いようにも思う。)
このグリスは、鉱物OIL的な匂いは有る。
チューブから出る3〜4mmの間隔でテスターを当てると、なんと0.8KΩくらいと低い。
でも、接点グリスで5〜10倍に薄めれば、計測不能の抵抗値になるので問題無い。 <薄めても変わらず真っ黒なので汚れに注意。
。
接点復活王とガリ取りくんも少し混ざっている。
で、これ、粘性が高くて、ナカナカ入らない。エアツールのダスターで僅かに入れた。
でもって、聞いてみたとこ、ザラザラノイズは少し減った感じで、回した感じがスムーズになった感じ。
もっとネトッと多量に入れれば、良く効くかな、と思われる。
一番は、やはり、摺動面の摩耗からの保護である。
−−−−−−−−−−−−−−−−−−−−
端子に使用する場合、べたつくのはNGなイメージであるから、ケイグGシリーズのスプレーは印象が良かった。
その点、フェーダーと端子では逆の要素のようですね。別々に所有して使った方が良いと思います。
あと気になるのは
・ワコーズ CR-W 接点復活剤 潤滑タイプ A470
・AZ 接点復活Pro 960
・ケイグのフェーダー用
・サンハヤトのFC-901コンタクトリバイバー
・和光テクニカル チタンオーディオオイルTI102(30)
位かな?
ケイグのGシリーズの原液は、拭き取りを前提としてるそうで、ソレをせずに二度塗りなどしてベタベタで導通を悪くし、悪い評価を付けてるヒトが結構居るようです。
組成はOILですから、ベタベタになったら、特に低インピーダンスな、ヘッドフォン、スピーカー出力には、致命的な状態にもなり得ます。RCならコネクタの発熱まで起こります。
二度塗りするなら暫く置いて拭き取ってからもう一度塗って暫く置いて拭き取る感じですね。
効果は最長10年持つとか謳ってるらしいです。多分抜き差しをほぼしないケースですね。
スプレーなら、ちっちゃな工業用綿棒でこすりつけるだけでべたつきもせず丁度良いのかも。しかも、洗浄剤が多少入ってるようです。
原液でも、なるべく薄く無駄なく塗るために工業用綿棒という感じでもあるです。
まずは、2極端子にははみ出るとショートするとか有るので、導電性がありすぎるか様子を見る。
タミヤ接点グリスや接点復活王もまぜるか?
あとは塗りつけ方法、フェーダーだから、構造的に高粘度の状態で流し込みは難しい。エアダスターで送り込むか、接点復活剤に入ってる溶剤か?
スラストマスターのコントロールスティックの可変抵抗には黒いグリースが使われ、潤滑と保護が目的のようだが、可変抵抗は100KΩ程度。
これの抵抗値を乱さないレベルで、似たようなモノにしたい。
(粒子が入ると、粘性が上がるが、非ニュートン粘弾性があると、絡みついて良いようにも思う。)
このグリスは、鉱物OIL的な匂いは有る。
チューブから出る3〜4mmの間隔でテスターを当てると、なんと0.8KΩくらいと低い。
でも、接点グリスで5〜10倍に薄めれば、計測不能の抵抗値になるので問題無い。 <薄めても変わらず真っ黒なので汚れに注意。
。
接点復活王とガリ取りくんも少し混ざっている。
で、これ、粘性が高くて、ナカナカ入らない。エアツールのダスターで僅かに入れた。
でもって、聞いてみたとこ、ザラザラノイズは少し減った感じで、回した感じがスムーズになった感じ。
もっとネトッと多量に入れれば、良く効くかな、と思われる。
一番は、やはり、摺動面の摩耗からの保護である。
−−−−−−−−−−−−−−−−−−−−
端子に使用する場合、べたつくのはNGなイメージであるから、ケイグGシリーズのスプレーは印象が良かった。
その点、フェーダーと端子では逆の要素のようですね。別々に所有して使った方が良いと思います。
あと気になるのは
・ワコーズ CR-W 接点復活剤 潤滑タイプ A470
・AZ 接点復活Pro 960
・ケイグのフェーダー用
・サンハヤトのFC-901コンタクトリバイバー
・和光テクニカル チタンオーディオオイルTI102(30)
位かな?
ケイグのGシリーズの原液は、拭き取りを前提としてるそうで、ソレをせずに二度塗りなどしてベタベタで導通を悪くし、悪い評価を付けてるヒトが結構居るようです。
組成はOILですから、ベタベタになったら、特に低インピーダンスな、ヘッドフォン、スピーカー出力には、致命的な状態にもなり得ます。RCならコネクタの発熱まで起こります。
二度塗りするなら暫く置いて拭き取ってからもう一度塗って暫く置いて拭き取る感じですね。
効果は最長10年持つとか謳ってるらしいです。多分抜き差しをほぼしないケースですね。
スプレーなら、ちっちゃな工業用綿棒でこすりつけるだけでべたつきもせず丁度良いのかも。しかも、洗浄剤が多少入ってるようです。
原液でも、なるべく薄く無駄なく塗るために工業用綿棒という感じでもあるです。
 和光テクニカル チタンオーディオオイルTI102(30)はケイグGシリーズと似た特性を持っています。洗浄作用もあるようで、金以外はこちらが良いとも。
(イオン化傾向で、酸化金属を剥がすなどして、置換的にチタンがくっつくような感じのイメージかな?)
汚れ落としの効果は弱いらしい。金属の種類は問わないらしい。
「端子の保護」に関しては、この二つが良いかも。あとは場所によってはナノカーボン?
(ナノカーボンは接点洗浄でも保護でもない。抵抗の大幅な低減が目的で、比較的長持ちはする。ナノダイヤというのもある。)
この二種の共通部分。
・強い保護膜の形成
・酸化、硫化、摩耗防止。
・抜き差しが結構スムーズになります。
スプレーから出したのは塗料の小瓶に入れて、工業用綿棒と共にジップロックに入れて冷蔵庫で保存してます。<瓶の塗料も実際揮発するので蒸気圧を保つため。
使って見て、工業用綿棒が結構汚れるときがあり、
高い原液の瓶な製品では、
新しい工業用綿棒に、ハケで垂らす感じでしみこますのがイイかもと思います。
なぜならば、妙に使い回すと、劣化物を瓶に戻すことになり、瓶内部の液全体の薬効を落とすことになりかねないからです。
あとは瓶は、冷暗所に保存ですね。
接点復活剤は、一瞬のその場しのぎだけではない。ある程度の保護する持続性、予防効果という、
使って見て結構おいしい部分もあると感じました。交換が困難な部品にはとても助かります。
もちろん、寿命と思えるモノには効果は弱めに出るかも知れないし、持続性も弱いかも。
でも、アナログオシロのセレクターSWなんて、特別部品ばかりで交換部品がないですからね。
モノによっては、電解メッキセットなどで再めっきが有効。変な保護剤は使えないリレー接点にも。
フェーダーは、もう削れてる場合、接点をずらし、コンタクトポイントの位置を変えるのもテではある。
(プロリペアマンは急場をコレでしのいで、交換する。なんていうと、カッコが付くかもだが、部品自体の修理としてはココらへん。
まあ、古い家電機器の寿命がかなり接触や電解コンデンサー、樹脂の劣化などによるものであるというのも事実だが、、)
また、プラに駄目なモノでも金属接点に綿棒で塗れるなら、モノは使いようである。
一般では単にシュッと一吹き、お手軽便利に、という使い方だと、まあ、知れてる要素は強いとは思う。
ただ忘れてならないのは、新品だって単純に使い続けるならいずれ接点不良は起こる。酷使するなら保護はあった方が良い。
新品だから発生しない現象でもない。
◇まとめ。
樹脂を侵すモノがあります。
カーボン、酸化、硫化被膜を落とすのなら、安くて色々ありますので。
まずはソレを使ったあとで、別の保護メインので保護するのが重要です。
あとは、一般接点用とフェーダー用の違いですね。
ややこしいので、資料
Dシリーズは洗浄復活メイン。 スプレーはDの原液の5%、クリーニング成分は20% 原液もクリーニング効果があるように書いてある。
Gシリーズは金めっきメインだと言われてるけど、普通の金属にも使える。 スプレーはGoldの原液の5%で、クリーニング成分は0.5%。
Sシリーズが金属全般の保護。屋外耐候性。 スプレーは、Shield原液の5%。クリーニング成分は不明。
白ずんでるニッケルめっきと思われる鍵にスプレータイプの液を綿棒でこすりつけてみた。
和光テクニカル チタンオーディオオイルTI102(30)はケイグGシリーズと似た特性を持っています。洗浄作用もあるようで、金以外はこちらが良いとも。
(イオン化傾向で、酸化金属を剥がすなどして、置換的にチタンがくっつくような感じのイメージかな?)
汚れ落としの効果は弱いらしい。金属の種類は問わないらしい。
「端子の保護」に関しては、この二つが良いかも。あとは場所によってはナノカーボン?
(ナノカーボンは接点洗浄でも保護でもない。抵抗の大幅な低減が目的で、比較的長持ちはする。ナノダイヤというのもある。)
この二種の共通部分。
・強い保護膜の形成
・酸化、硫化、摩耗防止。
・抜き差しが結構スムーズになります。
スプレーから出したのは塗料の小瓶に入れて、工業用綿棒と共にジップロックに入れて冷蔵庫で保存してます。<瓶の塗料も実際揮発するので蒸気圧を保つため。
使って見て、工業用綿棒が結構汚れるときがあり、
高い原液の瓶な製品では、
新しい工業用綿棒に、ハケで垂らす感じでしみこますのがイイかもと思います。
なぜならば、妙に使い回すと、劣化物を瓶に戻すことになり、瓶内部の液全体の薬効を落とすことになりかねないからです。
あとは瓶は、冷暗所に保存ですね。
接点復活剤は、一瞬のその場しのぎだけではない。ある程度の保護する持続性、予防効果という、
使って見て結構おいしい部分もあると感じました。交換が困難な部品にはとても助かります。
もちろん、寿命と思えるモノには効果は弱めに出るかも知れないし、持続性も弱いかも。
でも、アナログオシロのセレクターSWなんて、特別部品ばかりで交換部品がないですからね。
モノによっては、電解メッキセットなどで再めっきが有効。変な保護剤は使えないリレー接点にも。
フェーダーは、もう削れてる場合、接点をずらし、コンタクトポイントの位置を変えるのもテではある。
(プロリペアマンは急場をコレでしのいで、交換する。なんていうと、カッコが付くかもだが、部品自体の修理としてはココらへん。
まあ、古い家電機器の寿命がかなり接触や電解コンデンサー、樹脂の劣化などによるものであるというのも事実だが、、)
また、プラに駄目なモノでも金属接点に綿棒で塗れるなら、モノは使いようである。
一般では単にシュッと一吹き、お手軽便利に、という使い方だと、まあ、知れてる要素は強いとは思う。
ただ忘れてならないのは、新品だって単純に使い続けるならいずれ接点不良は起こる。酷使するなら保護はあった方が良い。
新品だから発生しない現象でもない。
◇まとめ。
樹脂を侵すモノがあります。
カーボン、酸化、硫化被膜を落とすのなら、安くて色々ありますので。
まずはソレを使ったあとで、別の保護メインので保護するのが重要です。
あとは、一般接点用とフェーダー用の違いですね。
ややこしいので、資料
Dシリーズは洗浄復活メイン。 スプレーはDの原液の5%、クリーニング成分は20% 原液もクリーニング効果があるように書いてある。
Gシリーズは金めっきメインだと言われてるけど、普通の金属にも使える。 スプレーはGoldの原液の5%で、クリーニング成分は0.5%。
Sシリーズが金属全般の保護。屋外耐候性。 スプレーは、Shield原液の5%。クリーニング成分は不明。
白ずんでるニッケルめっきと思われる鍵にスプレータイプの液を綿棒でこすりつけてみた。
 結構擦ったけど、液には洗浄剤も僅かに入ってるため、光沢が出てきました。
保護の持続が見所である。
(接点ブライトはあまり効かず、リレークリーナーで光沢が出る質のモノだった。)
結構擦ったけど、液には洗浄剤も僅かに入ってるため、光沢が出てきました。
保護の持続が見所である。
(接点ブライトはあまり効かず、リレークリーナーで光沢が出る質のモノだった。)
 一番右のがGシリーズの原液(7.5ml)ちっさい。。
で、一番良い感じなのは、
洗浄後、Gシリーズのスプレータイプを、タミヤの小瓶に入れて、工業用綿棒で塗り、数十分乾かすのがいちばん安上がりで良い気がしました。<多分、原液の必要性は薄いです。
チタンオーディオオイルは、まだどうなのか判らない部分もありますが、印象は悪くないです。
黒い傷の入った金めっきプラグで比較したら。
チタンオーディオオイルの方が、汚れ落とし、接点修復作用が強い感じだった。
保護の強度や持続性はまだ判らないが、この上からケイグを使ってもイイと思われる。
効果が切れてからより、こまめなメンテが良いようなこともあるのですが…、
そういえば、ちょっと前に、中古の操縦桿なジョイスティックのタクトスイッチが幾つか死んでたのですが、
リレークリーナーを流し込んで、カチカチして、接点復活王でタミヤ接点グリスを流し込み、復活させました。
今でも健在です。接点グリスの性格から、また酷使しても、まずは再発しないかと思います。
あと、古い話ですが、ブラシモーターのコミュテーター、ブラシの洗浄に接点復活剤を使うことを思いついたのは自分だったりします。
その頃、アルコールのコミュテータードロップなんてのがありましたが、それとは桁外れに効いたので、、。
++++++++++++++++++++
210602
ガリ取りな接点復活でオシレーターのオーバーホール。
スラストマスターや、200万サイクル以上の操作耐久性で業務用も手がけるCH Productsの狭角可変抵抗も黒い接点グリスが使われてるのを見かけた。
炭素粒子で、潤滑を良くして保護もしてると思われる。
このやり方で、OSCをOH。(1985年の製品)
とはいえ、そんなグリース売ってないので、作る。
キタコカーボングリス+タミヤ接点グリスを、ガリ取りくん+接点復活王のスプレーで薄める。(スプレーを使うのは揮発液入りだから、注入時はさらさら状態で、時間が経てばドロドロにしたい。)
前にも書いたように、非ニュートン系粘弾性体だと粘りで絡みつくので都合が良いが、粒子が混ざるとある程度は似てきて、イケるかも。
そして、部品を分解すらしないで行う。
φ0.8mmの穴を開けている。。中を損傷したり、削りカスが中に入らないように注意。
一番右のがGシリーズの原液(7.5ml)ちっさい。。
で、一番良い感じなのは、
洗浄後、Gシリーズのスプレータイプを、タミヤの小瓶に入れて、工業用綿棒で塗り、数十分乾かすのがいちばん安上がりで良い気がしました。<多分、原液の必要性は薄いです。
チタンオーディオオイルは、まだどうなのか判らない部分もありますが、印象は悪くないです。
黒い傷の入った金めっきプラグで比較したら。
チタンオーディオオイルの方が、汚れ落とし、接点修復作用が強い感じだった。
保護の強度や持続性はまだ判らないが、この上からケイグを使ってもイイと思われる。
効果が切れてからより、こまめなメンテが良いようなこともあるのですが…、
そういえば、ちょっと前に、中古の操縦桿なジョイスティックのタクトスイッチが幾つか死んでたのですが、
リレークリーナーを流し込んで、カチカチして、接点復活王でタミヤ接点グリスを流し込み、復活させました。
今でも健在です。接点グリスの性格から、また酷使しても、まずは再発しないかと思います。
あと、古い話ですが、ブラシモーターのコミュテーター、ブラシの洗浄に接点復活剤を使うことを思いついたのは自分だったりします。
その頃、アルコールのコミュテータードロップなんてのがありましたが、それとは桁外れに効いたので、、。
++++++++++++++++++++
210602
ガリ取りな接点復活でオシレーターのオーバーホール。
スラストマスターや、200万サイクル以上の操作耐久性で業務用も手がけるCH Productsの狭角可変抵抗も黒い接点グリスが使われてるのを見かけた。
炭素粒子で、潤滑を良くして保護もしてると思われる。
このやり方で、OSCをOH。(1985年の製品)
とはいえ、そんなグリース売ってないので、作る。
キタコカーボングリス+タミヤ接点グリスを、ガリ取りくん+接点復活王のスプレーで薄める。(スプレーを使うのは揮発液入りだから、注入時はさらさら状態で、時間が経てばドロドロにしたい。)
前にも書いたように、非ニュートン系粘弾性体だと粘りで絡みつくので都合が良いが、粒子が混ざるとある程度は似てきて、イケるかも。
そして、部品を分解すらしないで行う。
φ0.8mmの穴を開けている。。中を損傷したり、削りカスが中に入らないように注意。
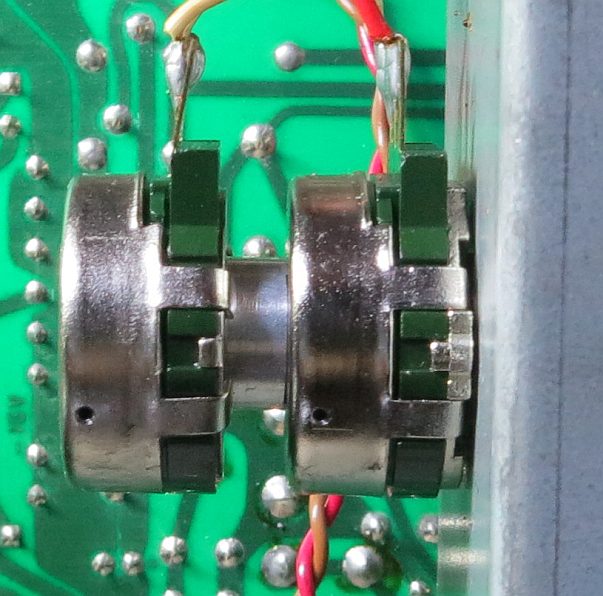 ここから注入。可変抵抗パターンの部分を下に向けダイヤルを何度も回す。ブラシは内回り外回りがある。
ここから注入。可変抵抗パターンの部分を下に向けダイヤルを何度も回す。ブラシは内回り外回りがある。
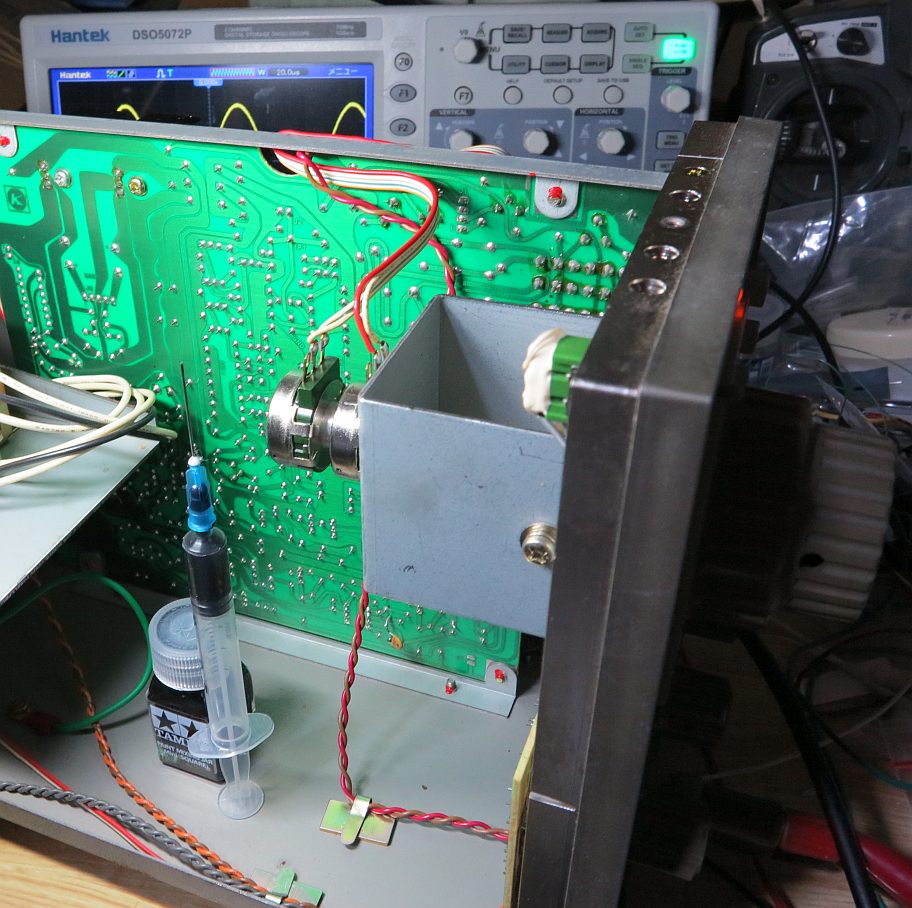 ダイヤルのノブがかなり軽くなった。
周波数が飛んだり、発振が止まったりが無くなった。
2台目は水浸しに近い地下室で数年保管…。紙袋が濡れてて、かび臭い状態なのに、復元。
ダイヤルのノブがかなり軽くなった。
周波数が飛んだり、発振が止まったりが無くなった。
2台目は水浸しに近い地下室で数年保管…。紙袋が濡れてて、かび臭い状態なのに、復元。
 穴はちょっと上目に開けた感。
穴はちょっと上目に開けた感。
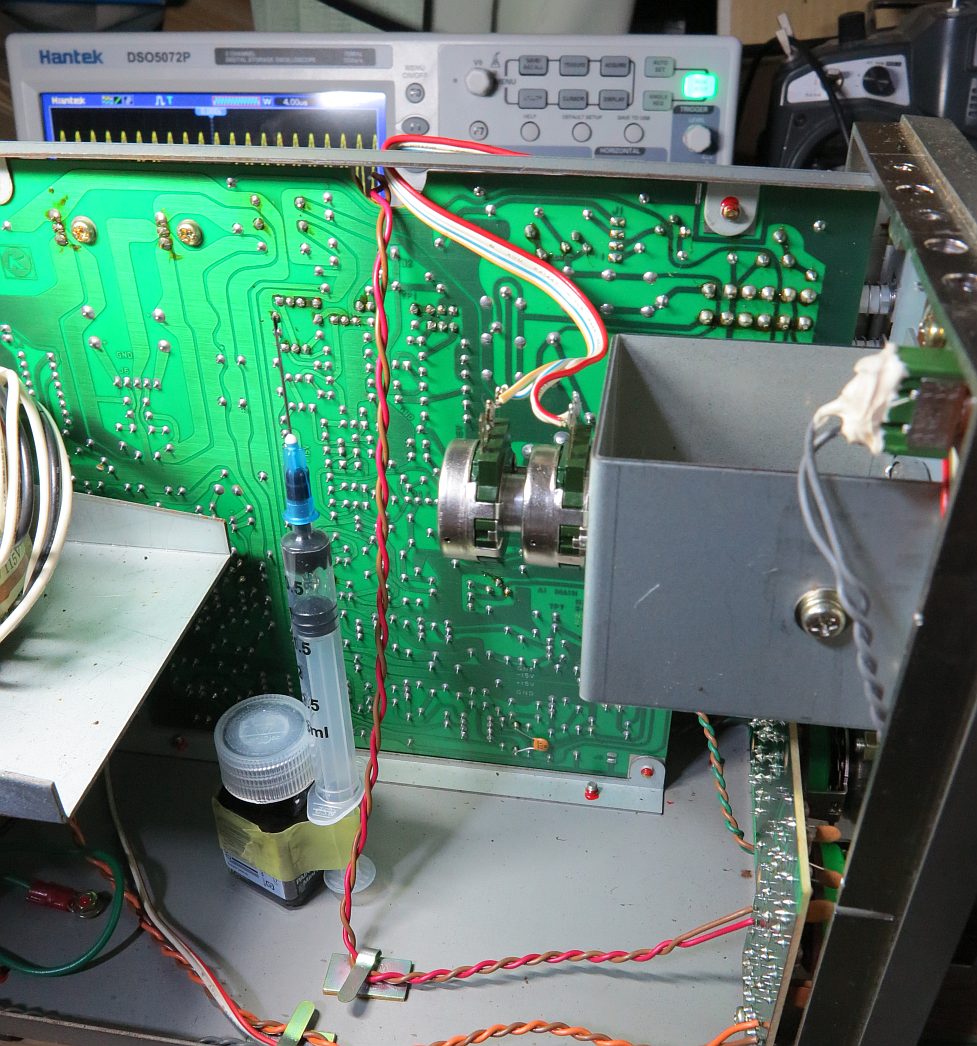 汚れと、摩耗、そのカスが、ガリに繋がると思われる。
この方法は、ボリュームだけでなく、接点がスライド接点なスイッチ類などにも有効かと。結構永続的に近く効くかも知れない。
あまり電流を流さず、微妙な抵抗率も関係ないなら、押しボタンスイッチや、リレー接点的なモノにも可能。
こちらは、端子な接点に使う。
新たなる綿棒。ケイグやチタンオーディオオイル原液用に。狭いところにも。液をケチるためにも。
マイクロアプリケーター極細綿棒マスカラブラシ用
汚れと、摩耗、そのカスが、ガリに繋がると思われる。
この方法は、ボリュームだけでなく、接点がスライド接点なスイッチ類などにも有効かと。結構永続的に近く効くかも知れない。
あまり電流を流さず、微妙な抵抗率も関係ないなら、押しボタンスイッチや、リレー接点的なモノにも可能。
こちらは、端子な接点に使う。
新たなる綿棒。ケイグやチタンオーディオオイル原液用に。狭いところにも。液をケチるためにも。
マイクロアプリケーター極細綿棒マスカラブラシ用
 先端部の全長は3mm程度。ゴシゴシ擦るのには向かないので、工業用綿棒と使い分ける。
そういえば、一番酷使してるのは、やはりというか、イヤホン端子のようです。
他は、ほぼ、挿しっぱなしが多い。
イヤホン端子は、プラグの方は結構変えられますが、受け側のジャックの方が交換が大変だったりしますので、
そちらにも塗るようにも。前にも書いたように、受け側の中は金めっきじゃない場合も多いですし。
症状が出る前か、なるべく初期にメンテを入れる。
OH後も、定期的にメンテすることで、部品が交換不可でも、寿命は結構長く使えるようになると思う。
…オーバーホールというより、レストアな感じ。
追記>
先端部の全長は3mm程度。ゴシゴシ擦るのには向かないので、工業用綿棒と使い分ける。
そういえば、一番酷使してるのは、やはりというか、イヤホン端子のようです。
他は、ほぼ、挿しっぱなしが多い。
イヤホン端子は、プラグの方は結構変えられますが、受け側のジャックの方が交換が大変だったりしますので、
そちらにも塗るようにも。前にも書いたように、受け側の中は金めっきじゃない場合も多いですし。
症状が出る前か、なるべく初期にメンテを入れる。
OH後も、定期的にメンテすることで、部品が交換不可でも、寿命は結構長く使えるようになると思う。
…オーバーホールというより、レストアな感じ。
追記>
 ゲインのロータリースイッチがちょっと安定しなかったので、隙間から接点復活王を流し込み、ぐりぐり。
治りました。接点復活王はかなり弱い接点復活ですが、保護はナカナカ良いかな?とも思ってます。
++++++++++++++++++++
あと、チタンオーディオOILとケイグの順序は逆の方が良い可能性もあります。
組成が不明なので、何度か実験してみないとホントのとこ判らない。
↓
で、実際やってみた。
後でチタンオーディオOILを付けた方が滑る。
その結果だけで見れば、先にケイグを塗った方がよさそう。
接点について、以後の詳細はこちらだけに書くことにしました。<メンドイので。
http://clamp-cc.sakura.ne.jp/Mouse-c.html
++++++++++++++++++++
(電気接点?)フッ素オイル「クライトックスGPL105」とかのうまい使い方。
フッ素オイル「クライトックスGPL105」とかのうまい使い方。
樹脂の潤滑においては、まあ、シリコーンが主流であった。、
ゲインのロータリースイッチがちょっと安定しなかったので、隙間から接点復活王を流し込み、ぐりぐり。
治りました。接点復活王はかなり弱い接点復活ですが、保護はナカナカ良いかな?とも思ってます。
++++++++++++++++++++
あと、チタンオーディオOILとケイグの順序は逆の方が良い可能性もあります。
組成が不明なので、何度か実験してみないとホントのとこ判らない。
↓
で、実際やってみた。
後でチタンオーディオOILを付けた方が滑る。
その結果だけで見れば、先にケイグを塗った方がよさそう。
接点について、以後の詳細はこちらだけに書くことにしました。<メンドイので。
http://clamp-cc.sakura.ne.jp/Mouse-c.html
++++++++++++++++++++
(電気接点?)フッ素オイル「クライトックスGPL105」とかのうまい使い方。
フッ素オイル「クライトックスGPL105」とかのうまい使い方。
樹脂の潤滑においては、まあ、シリコーンが主流であった。、
 が、シリコーンOILと比べものにならないといわれてる潤滑性のWAKOSのフッ素オイル。
(液化フッ素樹脂というと、昔、TASS2000というのがあったような。)
未塗装樹脂の保護には、同じWAKOSのスーパーハードの方が評判がよいらしい。
WAKOSのフッ素オイルの中身は、「クライトックスGPL105」なので、原液をメルカリで注文したらコストは約1/3に。(MonotaROのを分割して売ってるというモノです。)
何に使えるのかは考え中ですが、スイッチに使えるって言うと、接点もOKなのかな?
(シリコーンは、電気接点厳禁ですので。)
このWAKOSのスプレーは高いのですが、レビューに内容がありました。
ガス抜きをした後75g( 約48ml) 。溶剤を抜くと10ml。
脱脂しないと油分に阻害され定着せず、すぐ流れる可能性がある。
とのこと。
潤滑は、薄膜で十分。
原液を薄めたいので、ケロシンで5倍ほどに薄めてみる予定だが、上手く行くか?
(Soft99のシリコンオフやエネメル塗料薄め液)
が、シリコーンOILと比べものにならないといわれてる潤滑性のWAKOSのフッ素オイル。
(液化フッ素樹脂というと、昔、TASS2000というのがあったような。)
未塗装樹脂の保護には、同じWAKOSのスーパーハードの方が評判がよいらしい。
WAKOSのフッ素オイルの中身は、「クライトックスGPL105」なので、原液をメルカリで注文したらコストは約1/3に。(MonotaROのを分割して売ってるというモノです。)
何に使えるのかは考え中ですが、スイッチに使えるって言うと、接点もOKなのかな?
(シリコーンは、電気接点厳禁ですので。)
このWAKOSのスプレーは高いのですが、レビューに内容がありました。
ガス抜きをした後75g( 約48ml) 。溶剤を抜くと10ml。
脱脂しないと油分に阻害され定着せず、すぐ流れる可能性がある。
とのこと。
潤滑は、薄膜で十分。
原液を薄めたいので、ケロシンで5倍ほどに薄めてみる予定だが、上手く行くか?
(Soft99のシリコンオフやエネメル塗料薄め液)
 何に使うかと言えば、マウスのホイールや、動きの渋いスイッチのプラ部分
接点にはどうなのか不明だけど、有望とみてる。
勿体ないので、瞬着の入れ物とノズルみたいなのが有ると助かるけど。。。
現実的には、容器は、0.5mlのマイクロチューブとかスピッツ管。フタがしっかりとしてると良いのですが、揮発なら冷蔵保存で防ぐ?
何に使うかと言えば、マウスのホイールや、動きの渋いスイッチのプラ部分
接点にはどうなのか不明だけど、有望とみてる。
勿体ないので、瞬着の入れ物とノズルみたいなのが有ると助かるけど。。。
現実的には、容器は、0.5mlのマイクロチューブとかスピッツ管。フタがしっかりとしてると良いのですが、揮発なら冷蔵保存で防ぐ?
 それを立てるマイクロチューブラック、遠心管ラックスタンド、と高いのが多いので、スポンジにぶっさすとかマスキングテープで壁にくっつけるなどイロイロ方法はある。ラベルのシールとか有ると便利。
一応、安めなのを注文した。こんなに穴は要らないけど。
それを立てるマイクロチューブラック、遠心管ラックスタンド、と高いのが多いので、スポンジにぶっさすとかマスキングテープで壁にくっつけるなどイロイロ方法はある。ラベルのシールとか有ると便利。
一応、安めなのを注文した。こんなに穴は要らないけど。
 到着したので、使おうとしてみるに、ちょっと穴が大きすぎるような?
で、塗るのは、直接なら、爪楊枝見たいのが良いと思います。
注入には、薄まったOIL混入物をシリンジだと何なので、シリンジの針が付けられる、3ml容器が良いかもしれません。
「ドロッパーボトル」とか「スポイトタイプ」とか「点眼容器」というのに、「インジェクター針」、
他には、容器にノズルが合わさっている「ニードルボトル」というのもある。
到着したので、使おうとしてみるに、ちょっと穴が大きすぎるような?
で、塗るのは、直接なら、爪楊枝見たいのが良いと思います。
注入には、薄まったOIL混入物をシリンジだと何なので、シリンジの針が付けられる、3ml容器が良いかもしれません。
「ドロッパーボトル」とか「スポイトタイプ」とか「点眼容器」というのに、「インジェクター針」、
他には、容器にノズルが合わさっている「ニードルボトル」というのもある。
 取り付けが注射針のサイズのインジェクター針より安く、透明なは樹脂の「瞬着 ノズル」は良さそうに思うが、
ウチにある、いくつかの種類を試してみた結果、どれもフィットしなかった。セメダイン用ノズルN-10はちょっと緩めだけど、モノによっては使えるかも。
大量購入の方が安くなるのでこんな感じ。。
取り付けが注射針のサイズのインジェクター針より安く、透明なは樹脂の「瞬着 ノズル」は良さそうに思うが、
ウチにある、いくつかの種類を試してみた結果、どれもフィットしなかった。セメダイン用ノズルN-10はちょっと緩めだけど、モノによっては使えるかも。
大量購入の方が安くなるのでこんな感じ。。
 ブツが届きました。
ブツが届きました。
 商品説明には「スイッチ・ギヤーやコネクターの耐水保護膜」とある。
スイッチだといろいろな部分があって悩んだけど、コネクタとなると、やはり接点だと思う。
スパークしても、凝固物と言うより、ガスが発生するくらいかな?とは思います。
キャップの規格ががコンパチだった。
商品説明には「スイッチ・ギヤーやコネクターの耐水保護膜」とある。
スイッチだといろいろな部分があって悩んだけど、コネクタとなると、やはり接点だと思う。
スパークしても、凝固物と言うより、ガスが発生するくらいかな?とは思います。
キャップの規格ががコンパチだった。
 でもって、ケロシンが分離などせず混ざれば良いなー、と思っております。
で、計量は滴下によって行う。
一滴の容量は、0.04mlと記憶してたけど、Googleではトップに0.05mlとも出てくる。
でも、まあ、0.04という意見が多いですね。
まあ、液体の様々な物性にある程度は左右されるはずだとは思う。
滴下すると、予想通り普通の1/5程度の滴下量になった。
そして、これまた予想通り、シリコーンOILと同じく、ケロシンには溶けず、下に分離した。ある程度スポイトで除去してティッシュで吸収させ、最後は暖めて揮発させる感じで。
でも、シリコーンオフって、ケロシンで溶けなきゃ意味ないような??
WAKOSのは、「危険物の類別:非危険物」となっている。普通の溶剤じゃない??
信越シリコーンのシリコーンは、第4石油類に溶かしてあるようだ。
ラッカーとか、ペイント系、アルコール系、そしてシリコンオフに溶けるか調べなくては…、
アルコール系はブレーキクリーナーも含めダメ、塗料の溶剤も考えにくい。
なにせ、ガソリンに溶けないので、キャブレターや燃料コックの潤滑に使われるほどなのだ。うーん、頼もしいw
グリースやワックスに混ぜるとか有るけどソレには溶けるのか?固形WAXでも永遠には持たず揮発するタイプもあったような?
油と言っても、水に溶けないと言うだけじゃ途方もない。溶けないから有用な成分でもある感じで、シリコーンOILに溶ければ…
まず少量のOILと混合できれば、それが溶ける溶剤もイケるかも。
ココは時間がかかりそう。
んで、
WAKOSのフッ素オイルはこの要素が他と差別化されたウリの部分で、狭く深いようなところなどに染みこますには有効なのだと思う。
まあ、プラの艶出し用途も多いですが、
AZには接点復活PRO960に加えて、BGR-002(フッ素グリース)とかBlc-010(フッ素OIL)がある。
フッ素系100%油脂だから、AZがデュポン社の製品のライセンス生産かな?手軽に少量ならこちらが手間がかからないようにも思う。
送料考えると、同時注文かも。配送時間が長いのがアレだけど。
昔あったK&Sと言うところのフッ素系潤滑剤は、接点復活剤にもなると言うことだったので、接点OKの可能性はあるかも。
実のところ、使いたかったのは、コントロールスティックの押しボタンスイッチおよび、可変抵抗摺動面。
スイッチは、自作の方の押しボタンは、タクトスイッチと違ってストロークがあって良いのだが、擦れてる不快感と、摩耗したプラが粉を吹いて出てくる点。
つまり、ここらの摩耗耐久性にかかるところである。
あとは、マウスの慣性ホイールが長く動き続けて欲しい。
で、塗り方は簡単。爪楊枝の先に付けて、マウスの隙間からシャフト付近に塗る。3回くらい繰り返した。
その後、爪楊枝に残った液だけで、フライトコントロールスティック7箇所のスイッチに塗りつけることが出来た。
滑りがかなり良くって、快感ですね。
ホイールは、もっと粘性の低いOILもあるのでそちらの方が良いかも。
逆にスイッチは高粘度グリス状のが向く気がした。
今度は、AZのを試してみたい。AZのは、手に付くとよろしくないというウワサも。
で、今回の塗布作業、なんと、一滴未満で大体の要件を終えてしまった。
なんだ、殆ど音楽関係ないじゃないか。と言われると、まあ、その通り。。。
でも、シリコーンのように電気接点に気兼ねしながらではなく、接点にも使えるようなのは大きな利点。
多分、少量のモノは、普通の「爪楊枝」が有効だと思いました。
これは、ナノカーボン、ナノダイヤも同じかと。
でも、粉体の導体による接点改質を有効に活用するには、前処理の酸化面の除去も必要なのが大変そう。
追記>
・先ほどAZのフッ素のヤツを注文しました。
クライトックス105と比較しながら接点にも試してみたいです。
++++++++++++++++++++
マウスのスイッチとホイールのメンテナンス+性能アップ
[続15]マウスのメンテ+高性能に強化
マウスのスイッチの交換は想像してるほどそんな生やさしくなかった。
そこで、メンテだ。
ココが接点と言うとこを狙って接点を綺麗にして且つ強く保護されてるので、もう二度と接点不良は起こらないと思う。
(クリック感はへたるかも知れないが、オムロン純正ならそれも少ないと思う。)
文が長いので下記URLへ切り分けました。
http://clamp-cc.sakura.ne.jp/Mouse-c.html <<<<<<<<<<<<<<<<<<
可変抵抗なポテンショメーターの接点へのフッ素グリスの塗布についても書き加えました。
[続16](電気接点)マウスホイールとコントロースティックのSWにフッ素系油脂。
も、上記URLに掲載しました。
++++++++++++++++++++
++++++++++++++++++++
(電気接点)可変抵抗の接点にフッ素グリース
フッ素オイル系は、プラの艶出しやWAX添加剤にも使われでいる。それは、強靱な皮膜っぽいイメージだけど、
コネクタに使えるというのだから電気接点にもイケるハズ。
清掃してガリをとってから、潤滑、保護として使う。
保護はガリの防止と摺動面の摩耗からの保護の意味がある。
・艶出しの乾燥した皮膜程度にするか?
・グリス的にべったり付けるか?
皮膜が、薄くてもちゃんと保護が出来るか?というなら前者。
皮膜が、厚くても正常動作するか?を見るには後者。
ここは、正統派のクライトックス105を使って見るべきかな?
で、ケイグのFシリーズで処理した10KΩのモノにやってみようとしたら、カーボン面で結構弾く。でもまあ、軽く皮膜を張らしてみてオシロで見ながらチェックしたトコ、ガリやムラは皆無。
で、ちょっと心配なので、50KΩのVRでもやってみた。定着は良いようにはあまり見えなかったかも。で、ガリやムラは同様に皆無。
ということで、フッ素オイルの皮膜を形成しても、導通するという感じでしょうね。
カーボンパウダーを混ぜたらコンタクトの摩擦が更に良さそうにも思うのですが。。
使うのは、下地のカーボンを清掃、脱脂して、グリースタイプが良いかもですね。スラストマスターもカーボンパウダーの入ったグリースでしたし。
その下地処理の清掃は、接点洗浄剤⇒アルコールとやるとガリも取れ、OILと親和性が上がって皮膜がイイ感じに張れるかなーと思います。
コントロールスティックに使うには、接点の汚れや摩耗からの保護が重要です。
でもって、
今度は、10KΩの精密ポテンショメーターにフッ素グリスを塗ってみる。
IPA主体のパーツクリーナーを付け綿棒でカーボン面と電極面を脱脂、清掃。(耐久性が100万サイクル以上の製品だが、綿棒に黒いのが結構付着してきた。)
でもって、ケロシンが分離などせず混ざれば良いなー、と思っております。
で、計量は滴下によって行う。
一滴の容量は、0.04mlと記憶してたけど、Googleではトップに0.05mlとも出てくる。
でも、まあ、0.04という意見が多いですね。
まあ、液体の様々な物性にある程度は左右されるはずだとは思う。
滴下すると、予想通り普通の1/5程度の滴下量になった。
そして、これまた予想通り、シリコーンOILと同じく、ケロシンには溶けず、下に分離した。ある程度スポイトで除去してティッシュで吸収させ、最後は暖めて揮発させる感じで。
でも、シリコーンオフって、ケロシンで溶けなきゃ意味ないような??
WAKOSのは、「危険物の類別:非危険物」となっている。普通の溶剤じゃない??
信越シリコーンのシリコーンは、第4石油類に溶かしてあるようだ。
ラッカーとか、ペイント系、アルコール系、そしてシリコンオフに溶けるか調べなくては…、
アルコール系はブレーキクリーナーも含めダメ、塗料の溶剤も考えにくい。
なにせ、ガソリンに溶けないので、キャブレターや燃料コックの潤滑に使われるほどなのだ。うーん、頼もしいw
グリースやワックスに混ぜるとか有るけどソレには溶けるのか?固形WAXでも永遠には持たず揮発するタイプもあったような?
油と言っても、水に溶けないと言うだけじゃ途方もない。溶けないから有用な成分でもある感じで、シリコーンOILに溶ければ…
まず少量のOILと混合できれば、それが溶ける溶剤もイケるかも。
ココは時間がかかりそう。
んで、
WAKOSのフッ素オイルはこの要素が他と差別化されたウリの部分で、狭く深いようなところなどに染みこますには有効なのだと思う。
まあ、プラの艶出し用途も多いですが、
AZには接点復活PRO960に加えて、BGR-002(フッ素グリース)とかBlc-010(フッ素OIL)がある。
フッ素系100%油脂だから、AZがデュポン社の製品のライセンス生産かな?手軽に少量ならこちらが手間がかからないようにも思う。
送料考えると、同時注文かも。配送時間が長いのがアレだけど。
昔あったK&Sと言うところのフッ素系潤滑剤は、接点復活剤にもなると言うことだったので、接点OKの可能性はあるかも。
実のところ、使いたかったのは、コントロールスティックの押しボタンスイッチおよび、可変抵抗摺動面。
スイッチは、自作の方の押しボタンは、タクトスイッチと違ってストロークがあって良いのだが、擦れてる不快感と、摩耗したプラが粉を吹いて出てくる点。
つまり、ここらの摩耗耐久性にかかるところである。
あとは、マウスの慣性ホイールが長く動き続けて欲しい。
で、塗り方は簡単。爪楊枝の先に付けて、マウスの隙間からシャフト付近に塗る。3回くらい繰り返した。
その後、爪楊枝に残った液だけで、フライトコントロールスティック7箇所のスイッチに塗りつけることが出来た。
滑りがかなり良くって、快感ですね。
ホイールは、もっと粘性の低いOILもあるのでそちらの方が良いかも。
逆にスイッチは高粘度グリス状のが向く気がした。
今度は、AZのを試してみたい。AZのは、手に付くとよろしくないというウワサも。
で、今回の塗布作業、なんと、一滴未満で大体の要件を終えてしまった。
なんだ、殆ど音楽関係ないじゃないか。と言われると、まあ、その通り。。。
でも、シリコーンのように電気接点に気兼ねしながらではなく、接点にも使えるようなのは大きな利点。
多分、少量のモノは、普通の「爪楊枝」が有効だと思いました。
これは、ナノカーボン、ナノダイヤも同じかと。
でも、粉体の導体による接点改質を有効に活用するには、前処理の酸化面の除去も必要なのが大変そう。
追記>
・先ほどAZのフッ素のヤツを注文しました。
クライトックス105と比較しながら接点にも試してみたいです。
++++++++++++++++++++
マウスのスイッチとホイールのメンテナンス+性能アップ
[続15]マウスのメンテ+高性能に強化
マウスのスイッチの交換は想像してるほどそんな生やさしくなかった。
そこで、メンテだ。
ココが接点と言うとこを狙って接点を綺麗にして且つ強く保護されてるので、もう二度と接点不良は起こらないと思う。
(クリック感はへたるかも知れないが、オムロン純正ならそれも少ないと思う。)
文が長いので下記URLへ切り分けました。
http://clamp-cc.sakura.ne.jp/Mouse-c.html <<<<<<<<<<<<<<<<<<
可変抵抗なポテンショメーターの接点へのフッ素グリスの塗布についても書き加えました。
[続16](電気接点)マウスホイールとコントロースティックのSWにフッ素系油脂。
も、上記URLに掲載しました。
++++++++++++++++++++
++++++++++++++++++++
(電気接点)可変抵抗の接点にフッ素グリース
フッ素オイル系は、プラの艶出しやWAX添加剤にも使われでいる。それは、強靱な皮膜っぽいイメージだけど、
コネクタに使えるというのだから電気接点にもイケるハズ。
清掃してガリをとってから、潤滑、保護として使う。
保護はガリの防止と摺動面の摩耗からの保護の意味がある。
・艶出しの乾燥した皮膜程度にするか?
・グリス的にべったり付けるか?
皮膜が、薄くてもちゃんと保護が出来るか?というなら前者。
皮膜が、厚くても正常動作するか?を見るには後者。
ここは、正統派のクライトックス105を使って見るべきかな?
で、ケイグのFシリーズで処理した10KΩのモノにやってみようとしたら、カーボン面で結構弾く。でもまあ、軽く皮膜を張らしてみてオシロで見ながらチェックしたトコ、ガリやムラは皆無。
で、ちょっと心配なので、50KΩのVRでもやってみた。定着は良いようにはあまり見えなかったかも。で、ガリやムラは同様に皆無。
ということで、フッ素オイルの皮膜を形成しても、導通するという感じでしょうね。
カーボンパウダーを混ぜたらコンタクトの摩擦が更に良さそうにも思うのですが。。
使うのは、下地のカーボンを清掃、脱脂して、グリースタイプが良いかもですね。スラストマスターもカーボンパウダーの入ったグリースでしたし。
その下地処理の清掃は、接点洗浄剤⇒アルコールとやるとガリも取れ、OILと親和性が上がって皮膜がイイ感じに張れるかなーと思います。
コントロールスティックに使うには、接点の汚れや摩耗からの保護が重要です。
でもって、
今度は、10KΩの精密ポテンショメーターにフッ素グリスを塗ってみる。
IPA主体のパーツクリーナーを付け綿棒でカーボン面と電極面を脱脂、清掃。(耐久性が100万サイクル以上の製品だが、綿棒に黒いのが結構付着してきた。)
 爪楊枝でフッ素グリースを塗る。
爪楊枝でフッ素グリースを塗る。
 で、ガリや出力振幅の安定性をチェック。
で、ガリや出力振幅の安定性をチェック。
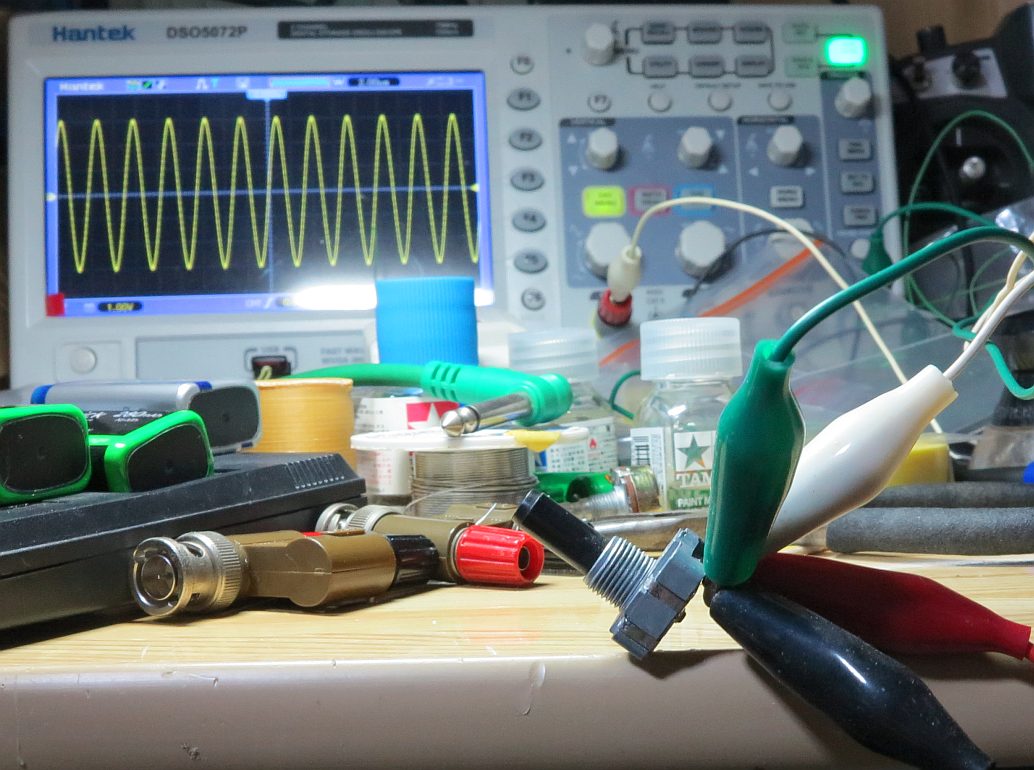 問題無いですね。ちゃんと接点が安定して導通、動作しております。
この結果から、
コントロールスティックのように、過酷に往復運動するモノでも結構保護膜で、耐久性を伸ばしてくれそうです。
しかし、油膜が摩擦から保護してると言うことと、導体がコンタクトして導通してると言うことは、矛盾してるようで不思議ですよね。。
追記>
スパークするような電気接点に付けると、多分凝固物は生成せずですが、フッ化水素ガスが出るかも知れません。
結構有害ガスですが、まあ少量ですね。
++++++++++++++++++++
++++++++++++++++++++
(電気接点)可変抵抗にチキソグリースのタックグリス(GRPの非ニュートン系粘弾性)
「非ニュートン系粘弾性流体」という物性がある。
チキソグリスはどうかな?チキソトロピーって、流体の性質だから、ソレとは別に薬剤的な効果の問題にもよるだろうけど。電気接点OKのであれば。
粘着性グリース「スティッキー・グリース」?ちょいと高いけど。
つまり、飛び散らず、動くモノに「絡みついてくる」タイプの接点グリースが欲しいわけで、、、
エンジンオイルやAT、ギヤOIL添加剤だとRESPOとかBe-UPとかだけど…、、無難な少量で効く「添加する基剤」としては売ってないのかな。
グリスとは、OILに浸け置くわけでなく、オープンなトコに塗りつけるだけのことで保ってるから、それ自体過酷な状態である。
同じ所を往復してたら、筋状にグリスは、かき分けるように押しのけられ、そぎ落とされ、または飛散したりして、そこは油脂切れとなっていくことになる。
そうなるなら、ドライ系皮膜の潤滑剤の方が勝るかもしれない。
RESPO、Be-UP、蜂蜜の粘りとウナギのヌメリがなんとかいう添加剤や、STPの青缶などが絡みつく。「非ニュートン系粘弾性流体」の特性を持つモノがある。
鳥もちは知れてるとかいかにもな知ったかしてたオサーンもいたけど、グリスの致命的な部分をどう考えどうするつもりか?
GRPは金属で機能が発揮されるモノなので、取り扱い店に質問してみたが、
・プラにはOKそうである。
・電気接点には不明。<個人的見解ではまず問題無し。
・片側が非金属の摺動面だとGRPとしての共晶膜は期待できない。
・金属面じゃなくっても、油性による絡みつきなどが良いので、それによるかなりの効果は期待できる。
とか。
やっぱ、可変抵抗、スクーターのプーリーとウェイトローラーなどに使いたいが、片方が非金属であるのが懸念される点ではある。
金属同士なら、GRPなので、かなり極圧に強いはずである。
最近流行の、超極圧剤「ベルハンマー」やその類似品はプラ使用OKだし、これも片面プラとかどうなのだろう?
はちみつに例えて言うからには、糸を引くほどねっとりとしてると予想してたけど、
普通のウレアグリスとかの固めなのとそれほど変わらなかった。動粘性の違いがデカいのかも。
ただ、ブラシを動かしたあとのスジが残ってるのが特徴的に見えた気がします。
問題無いですね。ちゃんと接点が安定して導通、動作しております。
この結果から、
コントロールスティックのように、過酷に往復運動するモノでも結構保護膜で、耐久性を伸ばしてくれそうです。
しかし、油膜が摩擦から保護してると言うことと、導体がコンタクトして導通してると言うことは、矛盾してるようで不思議ですよね。。
追記>
スパークするような電気接点に付けると、多分凝固物は生成せずですが、フッ化水素ガスが出るかも知れません。
結構有害ガスですが、まあ少量ですね。
++++++++++++++++++++
++++++++++++++++++++
(電気接点)可変抵抗にチキソグリースのタックグリス(GRPの非ニュートン系粘弾性)
「非ニュートン系粘弾性流体」という物性がある。
チキソグリスはどうかな?チキソトロピーって、流体の性質だから、ソレとは別に薬剤的な効果の問題にもよるだろうけど。電気接点OKのであれば。
粘着性グリース「スティッキー・グリース」?ちょいと高いけど。
つまり、飛び散らず、動くモノに「絡みついてくる」タイプの接点グリースが欲しいわけで、、、
エンジンオイルやAT、ギヤOIL添加剤だとRESPOとかBe-UPとかだけど…、、無難な少量で効く「添加する基剤」としては売ってないのかな。
グリスとは、OILに浸け置くわけでなく、オープンなトコに塗りつけるだけのことで保ってるから、それ自体過酷な状態である。
同じ所を往復してたら、筋状にグリスは、かき分けるように押しのけられ、そぎ落とされ、または飛散したりして、そこは油脂切れとなっていくことになる。
そうなるなら、ドライ系皮膜の潤滑剤の方が勝るかもしれない。
RESPO、Be-UP、蜂蜜の粘りとウナギのヌメリがなんとかいう添加剤や、STPの青缶などが絡みつく。「非ニュートン系粘弾性流体」の特性を持つモノがある。
鳥もちは知れてるとかいかにもな知ったかしてたオサーンもいたけど、グリスの致命的な部分をどう考えどうするつもりか?
GRPは金属で機能が発揮されるモノなので、取り扱い店に質問してみたが、
・プラにはOKそうである。
・電気接点には不明。<個人的見解ではまず問題無し。
・片側が非金属の摺動面だとGRPとしての共晶膜は期待できない。
・金属面じゃなくっても、油性による絡みつきなどが良いので、それによるかなりの効果は期待できる。
とか。
やっぱ、可変抵抗、スクーターのプーリーとウェイトローラーなどに使いたいが、片方が非金属であるのが懸念される点ではある。
金属同士なら、GRPなので、かなり極圧に強いはずである。
最近流行の、超極圧剤「ベルハンマー」やその類似品はプラ使用OKだし、これも片面プラとかどうなのだろう?
はちみつに例えて言うからには、糸を引くほどねっとりとしてると予想してたけど、
普通のウレアグリスとかの固めなのとそれほど変わらなかった。動粘性の違いがデカいのかも。
ただ、ブラシを動かしたあとのスジが残ってるのが特徴的に見えた気がします。
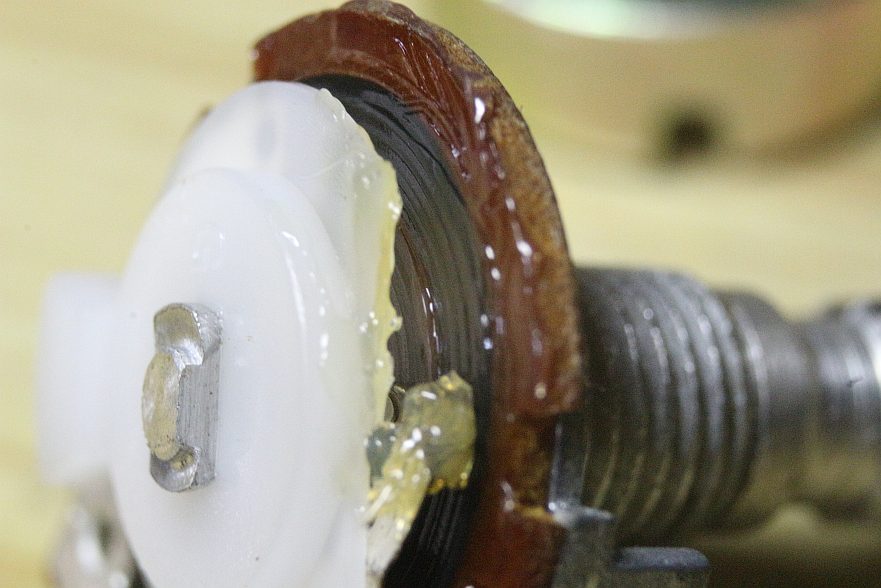 で、電気接点として、10KΩ(B)でチェック、スムーズに変化して、全く問題が無いです。
保護特性としてはかなり良いかな?と思います。
回したときのフィーリングも多少変わったようで、感触がとても良い。
埃は吸着しやすい性質なようなので、
シールした構造に近く塵の入り口になるようなとこは、マスクした方が良いかと思います。
++++++++++++++++++++
++++++++++++++++++++
メモリー食いなマイクロソフトフライトシミュレーターにメモリースワップファイルを設定する効率的方法。。-:??
メモリーのスワップファイルというのがあって、
RAMが足りないときにHDDを使うのですが、
Chromeを閉じてる途中など、結構動いていて、
その途中にシャットダウンなどをすると、読み、書き損じが起こったりするようで、ブルスクになり、
Chromeのプロフィールデータエラー等というのが出たりするようですね。
で、そのスワップファイルなのですが、ある程度小さい方が良いと思いました。
理由は、RAMはランダムアクセスメモリーですから、スワップが大きいとデータも散って、HDDのヘッドのアームも動く幅が広くなり、効率が悪くなる傾向がある。
という予想の感じです。
(RAMでも、ファイルを扱ってる部分もあると思うので、全くランダムなアクセスでないかも知れないので、少しは余裕も有った方が良いかも。)
事実、この対処法とChromeを閉じたあとHDDアクセスが静かになるのを待ってから電源を落とすとブルスク出現の確率は激減しました。
理想的にはHDD外周に連続ファイルで存在することが望ましい。
なんで、スワップなんかを?というと、32GB積んでるのですが、
4KディスプレイやVR-HMDにてマイクロソフトフライトシミュレーターを動かすと、これ以上食うようで、フライト直前にアプリが落ちる羽目になる感じです。
画面を極小にするときだけ動かせるレベルです。
今は改善されてるかも知れないですが…、
ということで、スワップファイルは多けりゃ良いワケでは無く、必要最小限に近いレベルにしないと、重くなったり、ディスクデーターのエラーを起こしたりするようです。
音楽アプリでそういうコトがあるかは不明ですが、、
正直、スワップを使わなければ、ブルスクなんて、年に一回味わうかというレベルなのに…、
++++++++++++++++++++
++++++++++++++++++++
220227
ロードセルを扱うに、OP-AMPの派生である、「計装アンプ」というのを使うと非常にラクになると思う。
倍率は抵抗で設定出来るし。+−入力ともとてもハイインピーダンス。
リファレンス端子で、オフセットも設定出来たり、至れり尽くせりな感じも。
−−−−−−−−−−−−−−−−−−−−−−−−−
XBox360互換コントローラーに変換する。-:??
230318
PC版エスコン7が安かったので、自作のジョイスティックでプレイ。
まず、自作のジョイスティックをXBox360ジョイパッド互換に変換するドライバーのようなツールを使用する。
設定がややこしいので古いバージョンの方が良い気もした。
実機の舵の遅れのシミュか感圧式なのにちょっと操作にレイテンシーがアル感じも?
x360ce_x64の(Ver3.2.8.76)を使用した。
参考資料:AC7のジョイスパッド変換。
https://steamcommunity.com/sharedfiles/filedetails/?id=1642042934
https://www.youtube.com/watch?v=DPUaFrzAE5s
他には、、
https://www.youtube.com/watch?v=JwP7kMYMId8
Ver4でも、出来た。
アナログ入力設定の一部が消える現象で手こずったけど。
何故か、治った。
で、電気接点として、10KΩ(B)でチェック、スムーズに変化して、全く問題が無いです。
保護特性としてはかなり良いかな?と思います。
回したときのフィーリングも多少変わったようで、感触がとても良い。
埃は吸着しやすい性質なようなので、
シールした構造に近く塵の入り口になるようなとこは、マスクした方が良いかと思います。
++++++++++++++++++++
++++++++++++++++++++
メモリー食いなマイクロソフトフライトシミュレーターにメモリースワップファイルを設定する効率的方法。。-:??
メモリーのスワップファイルというのがあって、
RAMが足りないときにHDDを使うのですが、
Chromeを閉じてる途中など、結構動いていて、
その途中にシャットダウンなどをすると、読み、書き損じが起こったりするようで、ブルスクになり、
Chromeのプロフィールデータエラー等というのが出たりするようですね。
で、そのスワップファイルなのですが、ある程度小さい方が良いと思いました。
理由は、RAMはランダムアクセスメモリーですから、スワップが大きいとデータも散って、HDDのヘッドのアームも動く幅が広くなり、効率が悪くなる傾向がある。
という予想の感じです。
(RAMでも、ファイルを扱ってる部分もあると思うので、全くランダムなアクセスでないかも知れないので、少しは余裕も有った方が良いかも。)
事実、この対処法とChromeを閉じたあとHDDアクセスが静かになるのを待ってから電源を落とすとブルスク出現の確率は激減しました。
理想的にはHDD外周に連続ファイルで存在することが望ましい。
なんで、スワップなんかを?というと、32GB積んでるのですが、
4KディスプレイやVR-HMDにてマイクロソフトフライトシミュレーターを動かすと、これ以上食うようで、フライト直前にアプリが落ちる羽目になる感じです。
画面を極小にするときだけ動かせるレベルです。
今は改善されてるかも知れないですが…、
ということで、スワップファイルは多けりゃ良いワケでは無く、必要最小限に近いレベルにしないと、重くなったり、ディスクデーターのエラーを起こしたりするようです。
音楽アプリでそういうコトがあるかは不明ですが、、
正直、スワップを使わなければ、ブルスクなんて、年に一回味わうかというレベルなのに…、
++++++++++++++++++++
++++++++++++++++++++
220227
ロードセルを扱うに、OP-AMPの派生である、「計装アンプ」というのを使うと非常にラクになると思う。
倍率は抵抗で設定出来るし。+−入力ともとてもハイインピーダンス。
リファレンス端子で、オフセットも設定出来たり、至れり尽くせりな感じも。
−−−−−−−−−−−−−−−−−−−−−−−−−
XBox360互換コントローラーに変換する。-:??
230318
PC版エスコン7が安かったので、自作のジョイスティックでプレイ。
まず、自作のジョイスティックをXBox360ジョイパッド互換に変換するドライバーのようなツールを使用する。
設定がややこしいので古いバージョンの方が良い気もした。
実機の舵の遅れのシミュか感圧式なのにちょっと操作にレイテンシーがアル感じも?
x360ce_x64の(Ver3.2.8.76)を使用した。
参考資料:AC7のジョイスパッド変換。
https://steamcommunity.com/sharedfiles/filedetails/?id=1642042934
https://www.youtube.com/watch?v=DPUaFrzAE5s
他には、、
https://www.youtube.com/watch?v=JwP7kMYMId8
Ver4でも、出来た。
アナログ入力設定の一部が消える現象で手こずったけど。
何故か、治った。
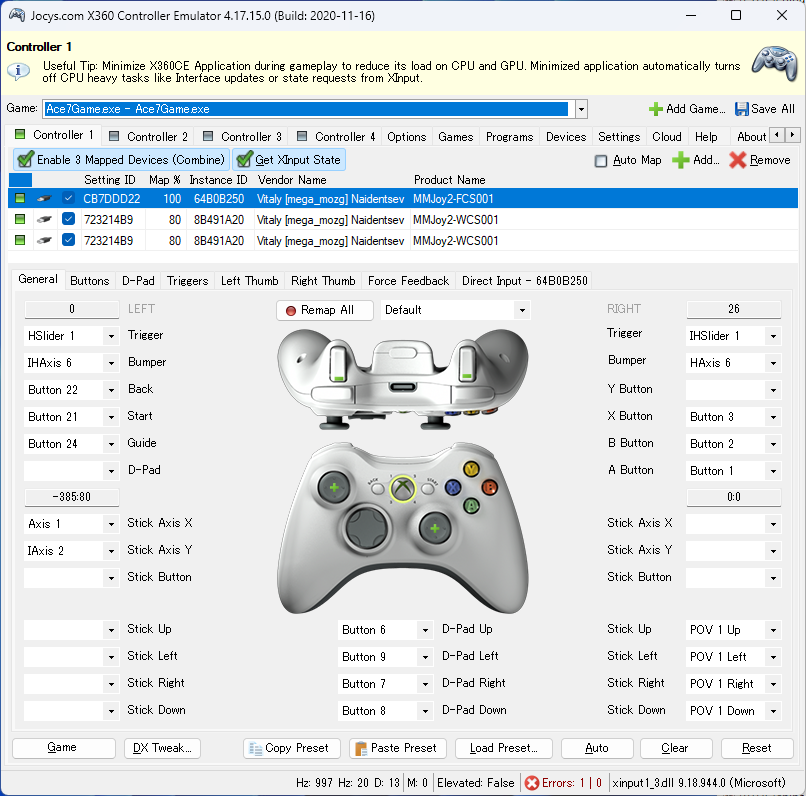 問題は、設定ファイルがドコにアルか。かな?
間違ってキーコンフィグをクリアしてしまったら…、、
Ver3と違うとこ、
コントローラータブに二つのジョイスティックを設定している。
設定保存方法
下にコピペ機能があって、
文書形式でクリップボードに保存されているので、
エディタに写せばOKでした。
C:\ProgramData\X360CE
にもあるようです。
このVer4、バグが結構あるようですね。
弄ってると、強制的に、X360ゲームパッド設定にされる…、
あと、コピペも気まぐれ。。
でも、上手く行ったの設定のバックアップを取っておけば…。
−−−−−−−−−−−−−−−−−−−−−−−−−
問題は、設定ファイルがドコにアルか。かな?
間違ってキーコンフィグをクリアしてしまったら…、、
Ver3と違うとこ、
コントローラータブに二つのジョイスティックを設定している。
設定保存方法
下にコピペ機能があって、
文書形式でクリップボードに保存されているので、
エディタに写せばOKでした。
C:\ProgramData\X360CE
にもあるようです。
このVer4、バグが結構あるようですね。
弄ってると、強制的に、X360ゲームパッド設定にされる…、
あと、コピペも気まぐれ。。
でも、上手く行ったの設定のバックアップを取っておけば…。
−−−−−−−−−−−−−−−−−−−−−−−−−

 アナログボリュームを増設して、少し上とか見れるようにした。
X360CEはVer3じゃないとどうしてか動かなかった。
GUI上では動くのだけどね。。不思議。
V4で動かない理由。二つ同時に立ち上がっていたのが原因。
ダイアログが出て異常終了した?と思ったときとかがネックかも。
タスクマネージャーで探してみるとあったり。
ウチにあった、HOTASX(PS3対応の)PCモードでもAC7は互換性があって、動いた。
操作性は、細かい操作はすこし得意かも知れない。
切り返しなど素早さとなると自作の感圧式なのだが…、
AC7は操作に対し、操舵、挙動が遅れる傾向があるようだ。
しかも、子舵でも遅れるので操作をかなり困難にしている。
そこがProjectWingmanとの大きな違いだった。
HOTASXでは、少し反応が早い気もするが、遅れることは遅れる。
---------------------まとめ-----------
エスコン7の問題
落ちると、ゲームをQuitしないかぎりのコンティニューでは、
途中のセーブポイントからになるようだ。
だから、ミサイルが足らないような仕様なのかもしれない。
しかも、何度も落ちながら進めるのも仕様のようである。
ところで、困ったのが、舵の遅れである。
これは、実機でもあるがそれは、舵の操作速度と、機体の慣性モーメントがあるからであり、子舵はほぼ遅れない。じゃないと当て舵がめちゃくちゃになる。
エスコンはHOTASXでもこれが改善されていない。
そして、操作は遅れるのにラダーはスイッチの反応である。
ラダー操作性を犠牲にして加減速をアナログSW化した意味ってあるの?
セールならオススメするが、それ以外は…、という評価が結構あるのはこういった事実からかも知れない。
エリアが狭かったり、拘束プレイも多い。
そして、ターゲット選択も困る。
まだ、VRを生かせば良かったが
ProjectWingmanと対照的な結果となってしまった。
---------------------------------------------------------
感圧式ラダーペダルの改善-:??
230402
感圧ラダーペダルの改良。
OP07CPZでオフセットを抑えたが、
精度は出ないというか、ノイズが多少アル。
これは、シールドケースでは無いからもあるが、ロードセルの線は外にむき出しなので…。
ハムが多いのでは?ということで、0.047μFを付けて見た。<0.1μFでもFc=16Hzなので、操作にはさして影響が無さそう。
アナログボリュームを増設して、少し上とか見れるようにした。
X360CEはVer3じゃないとどうしてか動かなかった。
GUI上では動くのだけどね。。不思議。
V4で動かない理由。二つ同時に立ち上がっていたのが原因。
ダイアログが出て異常終了した?と思ったときとかがネックかも。
タスクマネージャーで探してみるとあったり。
ウチにあった、HOTASX(PS3対応の)PCモードでもAC7は互換性があって、動いた。
操作性は、細かい操作はすこし得意かも知れない。
切り返しなど素早さとなると自作の感圧式なのだが…、
AC7は操作に対し、操舵、挙動が遅れる傾向があるようだ。
しかも、子舵でも遅れるので操作をかなり困難にしている。
そこがProjectWingmanとの大きな違いだった。
HOTASXでは、少し反応が早い気もするが、遅れることは遅れる。
---------------------まとめ-----------
エスコン7の問題
落ちると、ゲームをQuitしないかぎりのコンティニューでは、
途中のセーブポイントからになるようだ。
だから、ミサイルが足らないような仕様なのかもしれない。
しかも、何度も落ちながら進めるのも仕様のようである。
ところで、困ったのが、舵の遅れである。
これは、実機でもあるがそれは、舵の操作速度と、機体の慣性モーメントがあるからであり、子舵はほぼ遅れない。じゃないと当て舵がめちゃくちゃになる。
エスコンはHOTASXでもこれが改善されていない。
そして、操作は遅れるのにラダーはスイッチの反応である。
ラダー操作性を犠牲にして加減速をアナログSW化した意味ってあるの?
セールならオススメするが、それ以外は…、という評価が結構あるのはこういった事実からかも知れない。
エリアが狭かったり、拘束プレイも多い。
そして、ターゲット選択も困る。
まだ、VRを生かせば良かったが
ProjectWingmanと対照的な結果となってしまった。
---------------------------------------------------------
感圧式ラダーペダルの改善-:??
230402
感圧ラダーペダルの改良。
OP07CPZでオフセットを抑えたが、
精度は出ないというか、ノイズが多少アル。
これは、シールドケースでは無いからもあるが、ロードセルの線は外にむき出しなので…。
ハムが多いのでは?ということで、0.047μFを付けて見た。<0.1μFでもFc=16Hzなので、操作にはさして影響が無さそう。
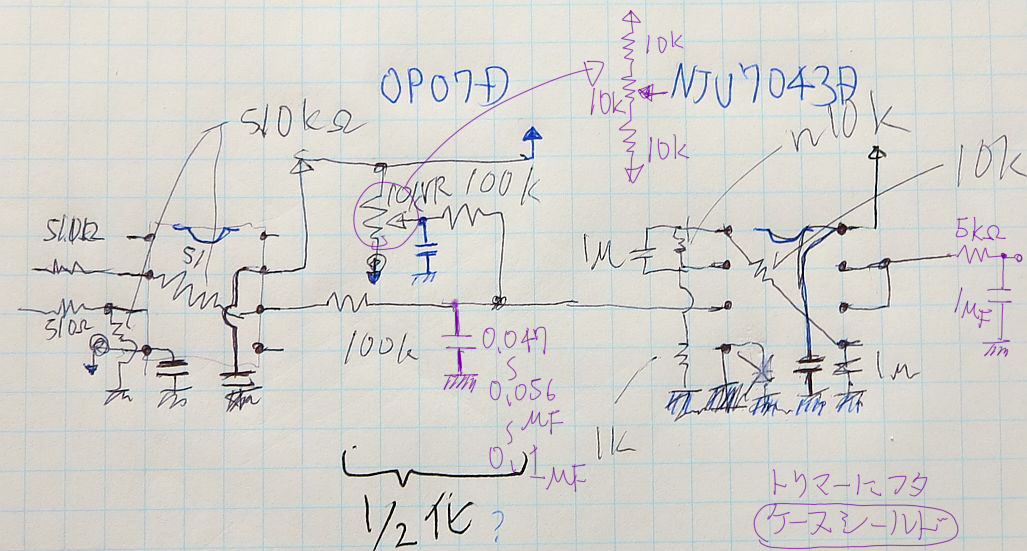 あまり単一のフィルターでFcを落とすよりも、多段LPFの方がかなり効果的ではある。
最後の出力部分にも、RCなLPFを付けることも可能だとは思うが、、10KΩと0.47μFとか、5.1KΩと1μFとかならさほど問題は無さそう。
で、それも付けて見た。
まあ、これで、それなりに落ち着いてはいる。
あとは、トリマーが不用意に回らないように、マスキングテープでフタをする必要があるかも。
とか、10KΩで挟んで、トリマーの感度を落とすことも可能。
シールドは、普通は荷が重いから、ポリカボケースの一部にアルミ箔で、一点アースすれば若干落ち着くかも知れない。
入力レベルオーバーに近い振れ幅であれば、
なるべく、初段にもフィルタが欲しいが、二つの510KΩにCを併設することになる。0.01μF位。
入力の差動部分にも付けるとしたら…
追記>
どうもGNDに触ったり離したりすると数値が多少上下する。
若干の静電位も影響するみたい。全て精密に等電位にシールドするのはムリだから〜
でもって、やっぱ、入力のノイズ振幅のレベルオーバーが気になったので、付けて見た。
ロードセルのホイートストンブリッジな合成抵抗が2KΩなので、1μFを繋いだ。<ここは構造的にはもっと多めで良いはずだけどお手軽に手頃に。
あまり単一のフィルターでFcを落とすよりも、多段LPFの方がかなり効果的ではある。
最後の出力部分にも、RCなLPFを付けることも可能だとは思うが、、10KΩと0.47μFとか、5.1KΩと1μFとかならさほど問題は無さそう。
で、それも付けて見た。
まあ、これで、それなりに落ち着いてはいる。
あとは、トリマーが不用意に回らないように、マスキングテープでフタをする必要があるかも。
とか、10KΩで挟んで、トリマーの感度を落とすことも可能。
シールドは、普通は荷が重いから、ポリカボケースの一部にアルミ箔で、一点アースすれば若干落ち着くかも知れない。
入力レベルオーバーに近い振れ幅であれば、
なるべく、初段にもフィルタが欲しいが、二つの510KΩにCを併設することになる。0.01μF位。
入力の差動部分にも付けるとしたら…
追記>
どうもGNDに触ったり離したりすると数値が多少上下する。
若干の静電位も影響するみたい。全て精密に等電位にシールドするのはムリだから〜
でもって、やっぱ、入力のノイズ振幅のレベルオーバーが気になったので、付けて見た。
ロードセルのホイートストンブリッジな合成抵抗が2KΩなので、1μFを繋いだ。<ここは構造的にはもっと多めで良いはずだけどお手軽に手頃に。
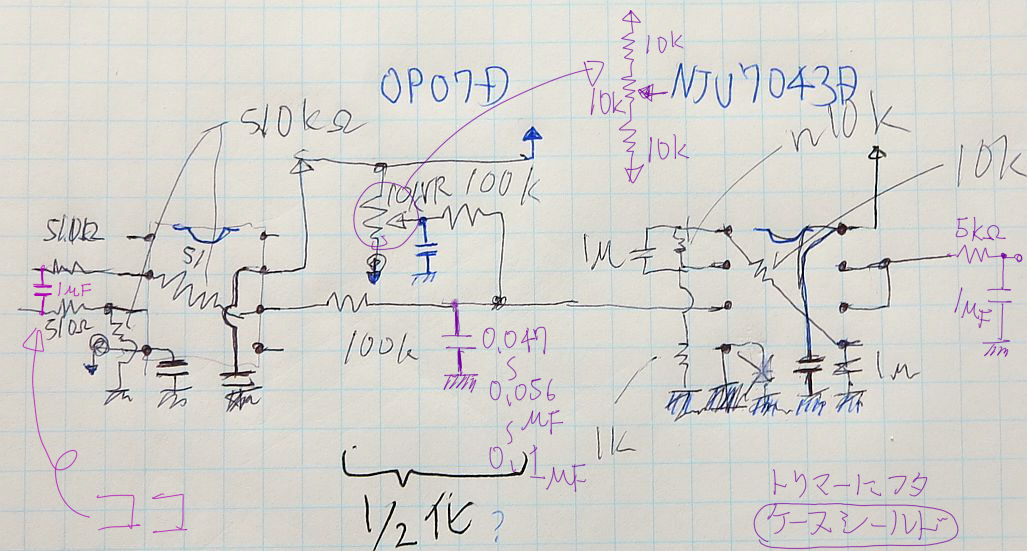 そしたら、テキメンで安定することとなった。
つまり、GNDに触ったりしても、まったくもってOKである。
ラダーは、素早い操作がどうこうと言うことが無ければ、ペダルなら、やはり位置制御が判りやすいと思う。
というのも、ツイストスティックなら問題無いが、ペダルは、足「二本」で一つの軸を動かすので、両方とも力を入れてしまっても力が無駄で動かない。
そこの力加減がが把握しにくいとこが大きい。
まあ、全く利点が無いとも言えないようで、慣れとしか言い様がないような。
−−−−−−−−−−−−−−−−−−−−
MicroBなUSBコネクタ破損予防。-:??
230421
MicroBなUSBコネクタ破損予防。
Arduinoボードを用いたMMJOY2な
ジョイスティック⇒USBアダプター、
USB側のMicroBが弱いので基板からコネクタごともげやすい。
でもって、以前は、再度半田を溶かして固定して、L字のコネクタで負担を少なくしていた。
が、やはり、負担はかかる。
軽度なら、紫外線硬化ジェルでモールドしても良いが、内部で壊れると逆に大変。
なので、
ケースの奥に基板を設置して、
ケース内側でコネクタを接続してケーブルが少したるんだ状態で出口をある程度固定した方が良いだろうと思った。
----------------------------------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------------------------------
10インチタブレットで「原神」用タッチスクリーン用メカニカルジョイスティック改-:??
原神用タッチスクリーン用メカニカルジョイスティック。
10.36インチのタブレットでの改造である。
右手の操作は、直観的で良いけど、左手は、斜めに走って橋などから落下というケースが多かった。
ちなみに、歩くか走るかの違いしか無いのだが、スティックのセンターにデッドゾーンがない。<後述。
で、メカニカルなスティックの必要性を感じた。
まず、二つ買ってみた。
そしたら、テキメンで安定することとなった。
つまり、GNDに触ったりしても、まったくもってOKである。
ラダーは、素早い操作がどうこうと言うことが無ければ、ペダルなら、やはり位置制御が判りやすいと思う。
というのも、ツイストスティックなら問題無いが、ペダルは、足「二本」で一つの軸を動かすので、両方とも力を入れてしまっても力が無駄で動かない。
そこの力加減がが把握しにくいとこが大きい。
まあ、全く利点が無いとも言えないようで、慣れとしか言い様がないような。
−−−−−−−−−−−−−−−−−−−−
MicroBなUSBコネクタ破損予防。-:??
230421
MicroBなUSBコネクタ破損予防。
Arduinoボードを用いたMMJOY2な
ジョイスティック⇒USBアダプター、
USB側のMicroBが弱いので基板からコネクタごともげやすい。
でもって、以前は、再度半田を溶かして固定して、L字のコネクタで負担を少なくしていた。
が、やはり、負担はかかる。
軽度なら、紫外線硬化ジェルでモールドしても良いが、内部で壊れると逆に大変。
なので、
ケースの奥に基板を設置して、
ケース内側でコネクタを接続してケーブルが少したるんだ状態で出口をある程度固定した方が良いだろうと思った。
----------------------------------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------------------------------
10インチタブレットで「原神」用タッチスクリーン用メカニカルジョイスティック改-:??
原神用タッチスクリーン用メカニカルジョイスティック。
10.36インチのタブレットでの改造である。
右手の操作は、直観的で良いけど、左手は、斜めに走って橋などから落下というケースが多かった。
ちなみに、歩くか走るかの違いしか無いのだが、スティックのセンターにデッドゾーンがない。<後述。
で、メカニカルなスティックの必要性を感じた。
まず、二つ買ってみた。
 左のは、歩く方向すら変わらないほどの移動範囲だった。
原神側での設定ではそのような感度(移動量)の問題は変えられない。
エレコムのロングストロークのはこんな感じ。
左のは、歩く方向すら変わらないほどの移動範囲だった。
原神側での設定ではそのような感度(移動量)の問題は変えられない。
エレコムのロングストロークのはこんな感じ。
 壊れやすいとも聞くが、500円ちょいだし、原神はそれほどのアクションゲームではないので、、
で、コレを取り付けてみると、ちょうど10mm長さが足らなかった。。
ホントは、原神のシステム側で、移動できれば良いのだけれど、そんな設定は皆無。
で、延長を考える。
厚さ0.5mmのポリカーボネートの板を幅5mmに切って張り付ける。<ポリカーボネートはねちっこいので強度的に良い。が、加工性は悪い。
加工性の問題は、0.5mm厚なのでハサミでも加工可能になるという利点です。
プラモデル用瞬着を使用している。金属用だと割れたり溶けたりのトラブルがあることが注意書きにあるので…、、<ソルベントクラックで
まあ、セメダインSuperXとかでも良いかと。
壊れやすいとも聞くが、500円ちょいだし、原神はそれほどのアクションゲームではないので、、
で、コレを取り付けてみると、ちょうど10mm長さが足らなかった。。
ホントは、原神のシステム側で、移動できれば良いのだけれど、そんな設定は皆無。
で、延長を考える。
厚さ0.5mmのポリカーボネートの板を幅5mmに切って張り付ける。<ポリカーボネートはねちっこいので強度的に良い。が、加工性は悪い。
加工性の問題は、0.5mm厚なのでハサミでも加工可能になるという利点です。
プラモデル用瞬着を使用している。金属用だと割れたり溶けたりのトラブルがあることが注意書きにあるので…、、<ソルベントクラックで
まあ、セメダインSuperXとかでも良いかと。
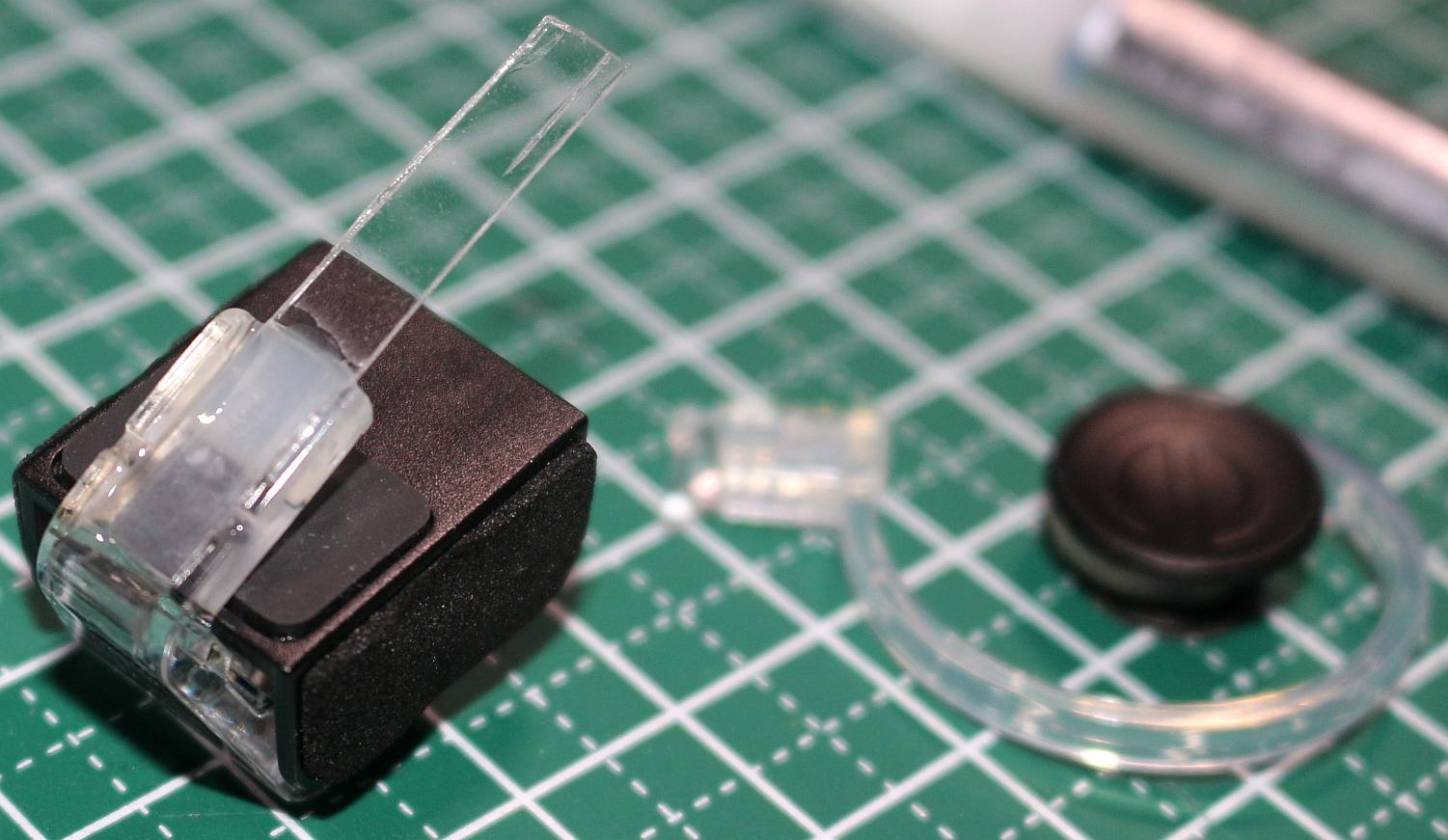
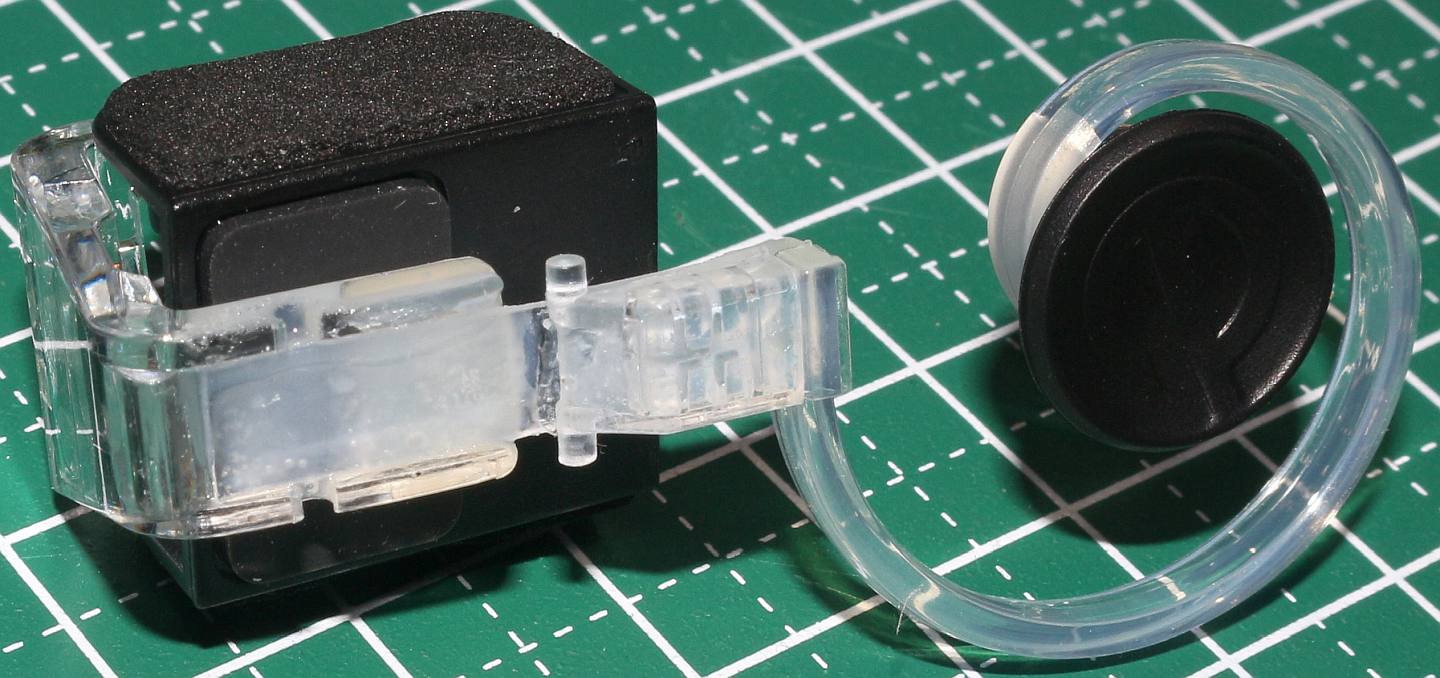 10mmの延長だが、10.5〜11mm程度に余裕を持たせた方が良いと思う。
(スティックに触れたときに僅かに前進になるように、、)
とりつけは、触れるとズレると思い下からにした。
10mmの延長だが、10.5〜11mm程度に余裕を持たせた方が良いと思う。
(スティックに触れたときに僅かに前進になるように、、)
とりつけは、触れるとズレると思い下からにした。

 でもって、
デッドゾーンがゼロの問題は、何かというと。
スティックに触れたときに、どちらかに歩くことが避けられない。
よって、先ほどの通り、少し前進に統一した方が良いと感じたからである。
あとは慣れ。。
ちなみに、瞬着なのだが、
硬化してから、24時間置くことが推奨されている。
強度がかなり違うということで、
あと、今回このタブレットで10mmだったのだけど、
その寸法は機種それぞれなので、実測が必要です。
ご注意を。
Dolphinエミュレータなど、タッチパネルのアナログ部が良く出来てるのだが、
難儀なコントロールである。
せめてカスタマイズできれば〜
誤って曲げ折ってしまったので、T=0.3mm厚のカーボン版にしてみた。
リードバルブようなので、耐久性は高いと思う。
でもって、
デッドゾーンがゼロの問題は、何かというと。
スティックに触れたときに、どちらかに歩くことが避けられない。
よって、先ほどの通り、少し前進に統一した方が良いと感じたからである。
あとは慣れ。。
ちなみに、瞬着なのだが、
硬化してから、24時間置くことが推奨されている。
強度がかなり違うということで、
あと、今回このタブレットで10mmだったのだけど、
その寸法は機種それぞれなので、実測が必要です。
ご注意を。
Dolphinエミュレータなど、タッチパネルのアナログ部が良く出来てるのだが、
難儀なコントロールである。
せめてカスタマイズできれば〜
誤って曲げ折ってしまったので、T=0.3mm厚のカーボン版にしてみた。
リードバルブようなので、耐久性は高いと思う。
 メモ>
精密樹脂滑り軸受シリーズ
細めのAWG28
UL1429AWG28
ウルトラ多用途SU プレミアム ソフトを塗ってウルトラ多用途SUプレミアム ハードでモールド。
スロットルカーブ
(はめ合いで外せる仕様?)。
カーボン板の接着。
フレキシブルジョイント
ポテンショメーターの実装。
古い記事
http://clamp-cc.sakura.ne.jp/rcttr6.html
◎
おおお
(https://ameblo.jp/eruna-captor/)
(C): Presented by captor@えるな
<<まとめ>>
RCヘリを操縦桿で動かす。
http://clamp-cc.sakura.ne.jp/soujyuukan.html
RCヘリの姿勢制御について、
http://clamp-cc.sakura.ne.jp/Seigyo-R.html
ヘリなどの主にメカニカル制御について、
http://clamp-cc.sakura.ne.jp/heli-r001.html
古いエアコンチューンナップ?
http://clamp-cc.sakura.ne.jp/Aircon-S.html
太陽電池と、鉛電池の再生、延命
http://clamp-cc.sakura.ne.jp/S-N-J.html
ヘッドフォンAMPなど
http://clamp-cc.sakura.ne.jp/tone-k-001.html
光線銃の制作
http://clamp-cc.sakura.ne.jp/kousenjyu.html
中周波なEMSの製作
http://clamp-cc.sakura.ne.jp/M-EMS.html
<<他>>
電解メッキ
https://ameblo.jp/eruna-captor/entry-12365554459.html
(C): Presented by captor@えるな
メモ>
精密樹脂滑り軸受シリーズ
細めのAWG28
UL1429AWG28
ウルトラ多用途SU プレミアム ソフトを塗ってウルトラ多用途SUプレミアム ハードでモールド。
スロットルカーブ
(はめ合いで外せる仕様?)。
カーボン板の接着。
フレキシブルジョイント
ポテンショメーターの実装。
古い記事
http://clamp-cc.sakura.ne.jp/rcttr6.html
◎
おおお
(https://ameblo.jp/eruna-captor/)
(C): Presented by captor@えるな
<<まとめ>>
RCヘリを操縦桿で動かす。
http://clamp-cc.sakura.ne.jp/soujyuukan.html
RCヘリの姿勢制御について、
http://clamp-cc.sakura.ne.jp/Seigyo-R.html
ヘリなどの主にメカニカル制御について、
http://clamp-cc.sakura.ne.jp/heli-r001.html
古いエアコンチューンナップ?
http://clamp-cc.sakura.ne.jp/Aircon-S.html
太陽電池と、鉛電池の再生、延命
http://clamp-cc.sakura.ne.jp/S-N-J.html
ヘッドフォンAMPなど
http://clamp-cc.sakura.ne.jp/tone-k-001.html
光線銃の制作
http://clamp-cc.sakura.ne.jp/kousenjyu.html
中周波なEMSの製作
http://clamp-cc.sakura.ne.jp/M-EMS.html
<<他>>
電解メッキ
https://ameblo.jp/eruna-captor/entry-12365554459.html
(C): Presented by captor@えるな