〜えるなの日記〜
eruna
デジカメ
40万画素
コリニア
100X-AMPラジケーター+Mixer
高画質TV画像を送信機のTx部分に→高画質
-------------------7
インクペン多量
ボールペン多数。
-------
TRAckJ−IR=VR+LD
トリム:Dサブ
ラジケーター用100Xアンプ
-------------------7
ハイギヤ付くか質問、か、サービスマニュアル。
Γ:ガスケット、<ネットで注文?
リアブレーキ注文(タイヤの交換時に付けてもらう。)+フォークOIL
Dio:ブレーキレバーの位置と遊びと、ランプの調整
コンビブレーキの解除、タルグリップ、メーター付け+リアブレーキ+タイヤ
2009年03月31日(火)
No.394
(未分類)
UHF、SHF1.2GOR2.4のTVTX
ワイヤレステレビカメラの到達距離のUP
2.4GHzの高利得アンテナ
発信側:無指向性ならあんまり変わらない。
受信側:コリニアアンテナ(十段以上?) <加工精度0.1mm
他(指向性):ログペリ、ダブルループ、ホーン式、
ローテーターで自動追尾か角度によって切り替え。
RFパワーブースターとしてテレビのUHF13chかアマチュア無線用パワーアンプIC
産業用半導体とストリップライン式ディスクリートで安く。
R&K、Minicircuitとか?
受信用AMP
選尺度UP、
混変調予防のフィルター
SWR計
オートチャンネル変更。
AR-2002内部のIFで引いた出力から受信。
ビデオ用のTVTXからSGのIFで周波数のシフト→ビートアップを抽出→PA
限界の出力は10W
アナログ高周波+無線の復活。
2009年03月24日(火)
No.393
(未分類)
eruna


eruna


100Aで0.1V位出る電流測定。
は、
1mΩ
電流測定の場合の抵抗。
0.008
0.00001オーム=10E-05Ω
銅の抵抗率 1.673E-08 Ωm <逆数が電気伝導率
L/S
φ2mmだと、
1・1・3.14×10E-06平方メートル
長さ1mmだと、
0.001/(3.14×10E-06)=0.32×10E+03倍
銅では、
(1.673E-08)・0.32×10E+3=0.532×10E-05Ω
5.32×10E-06Ω
長さが10cmだと、
5.32×10E-04Ω
太さをφ1.6mm(半径0.8mm)にすると
断面積は1/0.64倍、
抵抗値は1.5625倍。
長さが10cmだと、
8.3125×10E-04Ω
長さを
12cmだと1mΩ
---------------------
真鍮は?
---------------------
ホイートストンブリッジでの校正?
T-Rex450XL
動画
ワギング(ハンチング)が見られます。
ジャイロの感度が高いです。
.jpg) <未調整不安定なり浮上な動画です。
<未調整不安定なり浮上な動画です。
2009年03月22日(日)
No.391
(未分類)
Track-J-IR




eruna



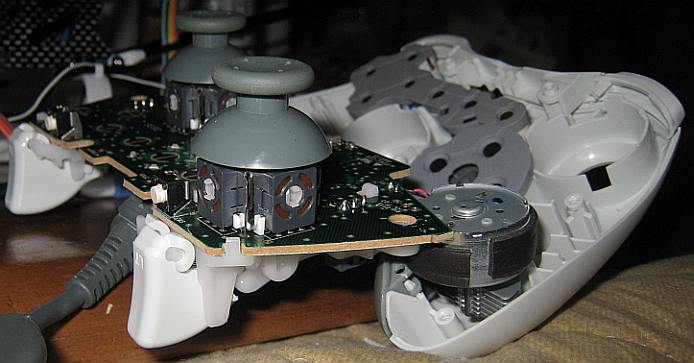
XIM2
…高すぎ。
PCにゲームお入れるとレジストリを汚すし、
高性能だとも思えないのでXBOXを購入しました。
最近のゲームって、
グラフィックスを抜き取ったら何も残らない。
退化してて
ときめかないですね。
FPSが出てるのに
マウスやキーボードが接続できないこと
ブラウザ、マルチメディアファイルの再生が殆ど無いコト
XBOXの拡張性の低さには、
エンターテイメント性が感じられず、
商魂に裏付けられる不具合だけが見えます。
そのうち淘汰されそうです。
FPS自体が作戦性の好奇心より、
ただの反射神経の手さばき。
ストレスの発散にもならないです。
オンラインゲームやオンラインで処理するノートPCでは、
高速なCPUは要らないどころか、
ブラウザ機能だけで、
WinとかMacとかいうOSも要らないですね。
2009年03月12日(木)
No.389
(未分類)
エルゴ50のMPM化。

エルゴ50のMPM化の途中。
部品は一万円前後で手配出来ました。
アッパーフレームはエルゴ30用です。
コンパチですので品番の違いは不明です。
---------------------
電動化
重さ:3300+400=3700g
ローター半径:1337mm
とすると
T-Rex600ランクと同等
ギヤ比:9.78以上 モジュール
ローター回転数:1350Rpm
より
モーター回転数:13238Rpm
22.2V×Kv=13238
Kv=596
電圧降下や余剰な回転数の余裕を15%ほど持たせると、
Kv=685
モーターが安いAlignには無いので、ギヤは作る?
必要なモノ
モーター:1300W以上
AMP:70〜90A
2009年03月10日(火)
No.388
(未分類)
eruna


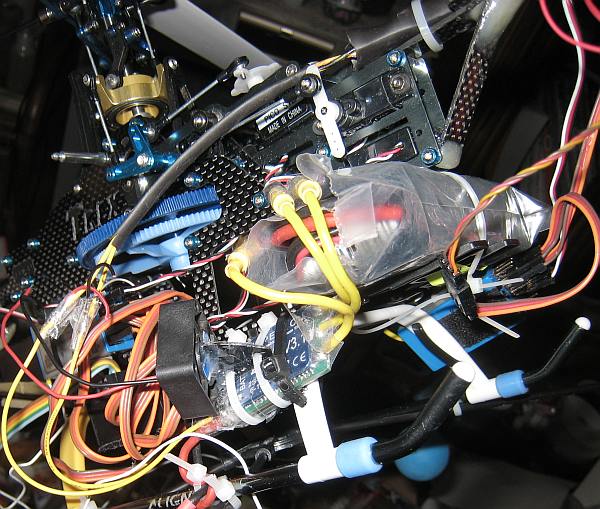
金属パーツへの交換。
CNCアルミ削り出しのスワッシュプレートが1657円という破格値でした。
壊れて注文により作業ストップというのとか、送料の問題。
逆に不経済?
金属になって、モーターも巨大になりましたのですが、
驚きの軽さです。
2009年03月10日(火)
No.387
(未分類)
eruna




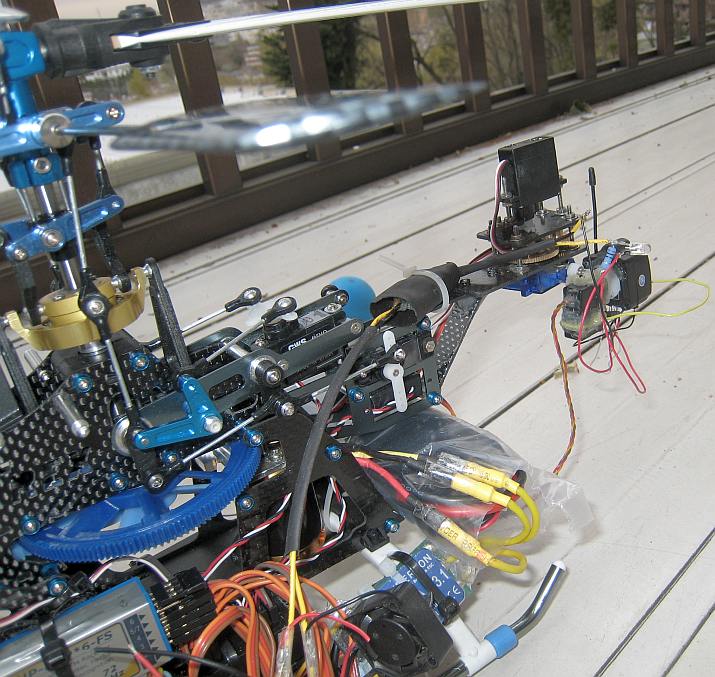
EPコンセプトは1400gあるのに、
T-Rex450と同等の動力で飛行できてます。
↓600ランクにて、
機体重量の10倍くらいは上げてますので、
T-Rex450を強化してすべて搭載して連続運用も大丈夫と考えました。
モーター:右下のを採用。
AMP:20A→35A
2009年03月10日(火)
No.386
(未分類)
eruna

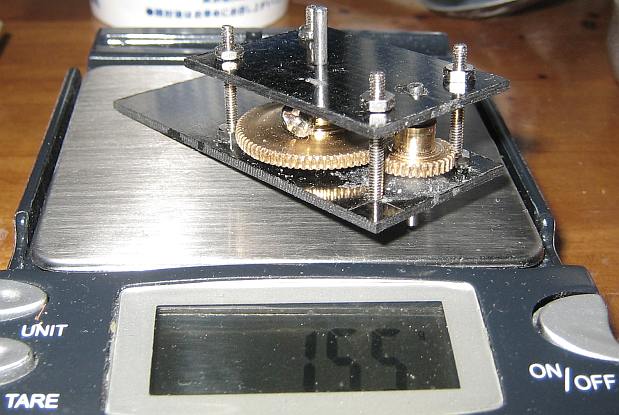


ギヤのモトの重さ
10.9+3.7=14.6g
旋盤で軽量化
3.4+1.3=4.7g
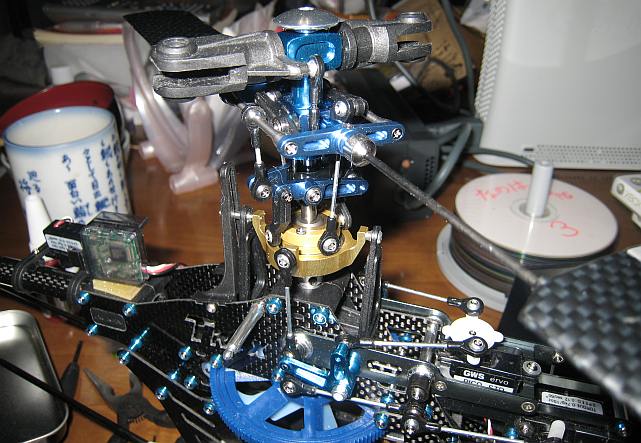
2mmステンレスバネ鋼シャフト
2mmボールベアリング
プログラマブルデジタルサーボ
正確で動作角度を140°まで広げられる。
CCDカメラの電源:9Vレギュレタ(低ドロップタイプ)
タグ:ヘッドトラッキング
2009年03月10日(火)
No.385
(未分類)



